Перекрестные ссылки на родственные заявки
[0001] Эта заявка испрашивает приоритет по японской патентной заявке № 2010-206776, поданной 15 сентября 2010 года. Полное раскрытие японской патентной заявки № 2010-206775 при этом содержится в данном документе по ссылке.
Область техники
[0002] Настоящее изобретение, в целом, относится к инверторному устройству и способу управления инвертором.
Предшествующий уровень техники
[0003] Традиционное устройство возбуждения двигателя может включать в себя устройство накопления электрической энергии, схему инвертора и множество переключающих элементов, которые предусмотрены между устройством накопления электрической энергии и схемой инвертора. Переключающие элементы задействуются контроллером, чтобы соединять и разъединять питание электрической энергией между устройством накопления электрической энергии и двигателем. Один пример традиционного устройства возбуждения двигателя раскрыт в японской выложенной патентной публикации № 2005-39887. В этой публикации устройство возбуждения двигателя позволяет выполнять обмен электрической энергией между устройством накопления электрической энергии и двигателем. Когда скорость вращения двигателя равна или больше, чем предписанная скорость вращения, все переключающие элементы схемы инвертора, которые соединены с положительным электродом устройства накопления электрической энергии, или все переключающие элементы схемы инвертора, которые соединены с отрицательным электродом устройства накопления электрической энергии, замкнуты (в проводящем состоянии). Между тем, когда электрический ток, протекающий к переключающим элементам, становится равным нулю, переключающие элементы приводятся в разъединенное или непроводящее состояние.
Краткое изложение существа изобретения
[0004] Было обнаружено, что с традиционным устройством возбуждения двигателя, описанным выше, когда скорость вращения двигателя равна или больше, чем предписанная скорость вращения, управление выполняется так, что замкнуты либо только все переключающие элементы, соединенные с положительным электродом устройства накопления электрической энергии, либо только все переключающие элементы, соединенные с отрицательным электродом устройства накопления электрической энергии. Это управление выполняется до тех пор, пока ток, протекающий к переключающим элементам, не станет равным нулю. Следовательно, электрический ток течет к переключающим элементам несбалансированным образом, и срок эксплуатации переключающих элементов сокращается.
[0005] Одной задачей настоящего изобретения является предоставление инверторного устройства, которое позволяет продлевать срок службы переключающих элементов.
[0006] Принимая во внимание состояние известной технологии, одним аспектом настоящего открытия является предоставление инверторного устройства, которое в своей основе содержит инвертор, компонент детектирования скорости вращения и компонент управления. Инвертор включает в себя множество пар переключающих элементов. Каждая из пар переключающих элементов электрически соединена с источником энергии постоянного тока. Компонент детектирования скорости вращения детектирует скорость вращения двигателя, который электрически соединен с парой переключающих элементов. Компонент управления управляет состоянием включения-выключения переключающих элементов, чтобы преобразовывать электрическую энергию постоянного тока от источника энергии постоянного тока в электрическую энергию переменного тока. Компонент управления дополнительно попеременно выполняет первое управление переключением и второе управление переключением при детектировании того, что скорость вращения больше, чем предписанная скорость вращения. Первое управление переключением включает все переключающие элементы из пары переключающих элементов, соединенных с положительным электродом источника электрической энергии постоянного тока, и выключает все переключающие элементы из пары переключающих элементов, соединенных с отрицательным электродом источника электрической энергии постоянного тока. Второе управление переключением включает все переключающие элементы из пары переключающих элементов, соединенных с отрицательным электродом источника электрической энергии постоянного тока, и выключает все переключающие элементы из пары переключающих элементов, соединенных с положительным электродом источника электрической энергии постоянного тока.
Краткое описание чертежей
[0007] Ссылаясь теперь на прилагаемые чертежи, которые являются частью этого исходного раскрытия сущности:
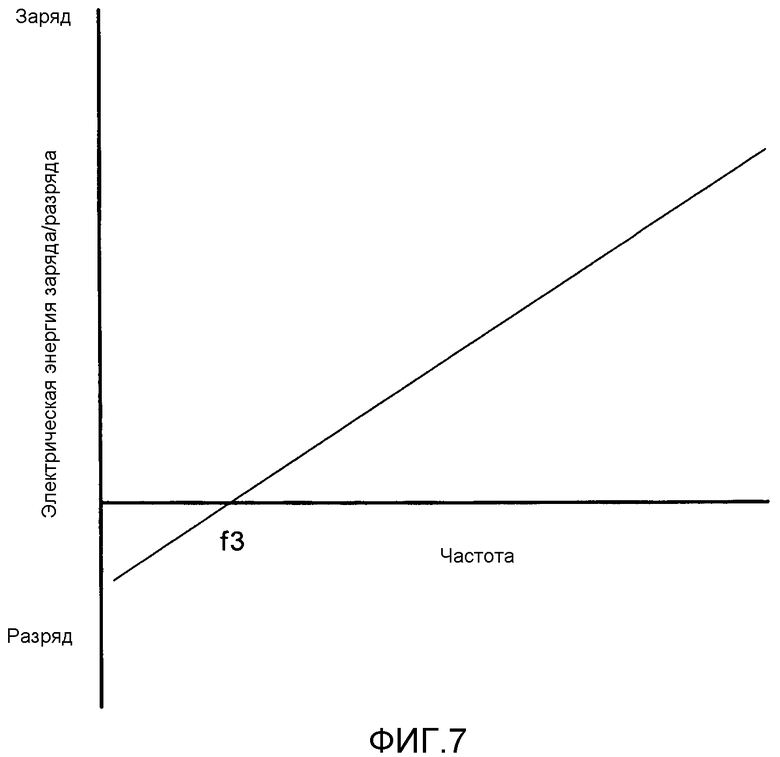
[0008] Фиг. 1 изображает блок-схему устройства источника энергии возбуждения, которое включает в себя инверторное устройство согласно варианту осуществления;
[0009] Фиг. 2 изображает блок-схему контроллера двигателя, показанного на фиг. 1;
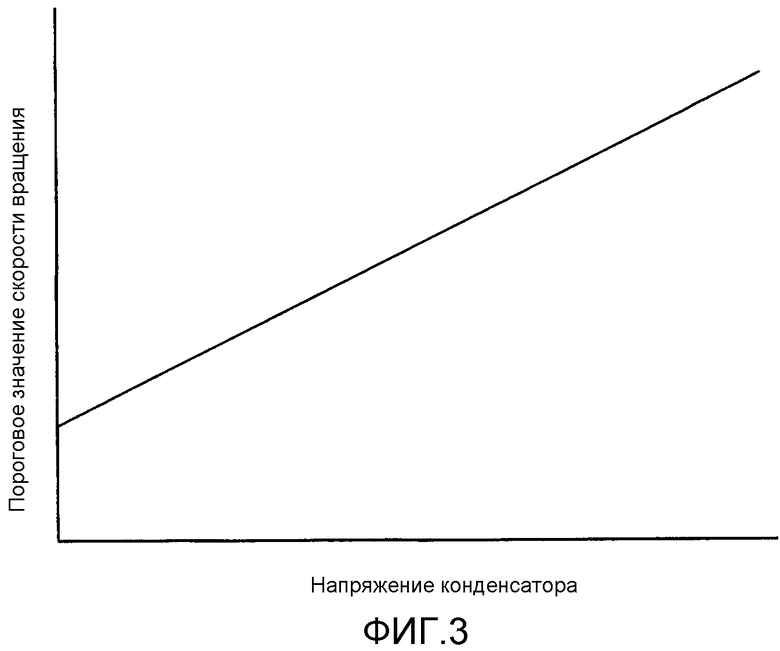
[0010] Фиг. 3 изображает диаграмму порогового значения скорости вращения в зависимости от характеристики напряжения для конденсатора, изображенного на фиг. 1;
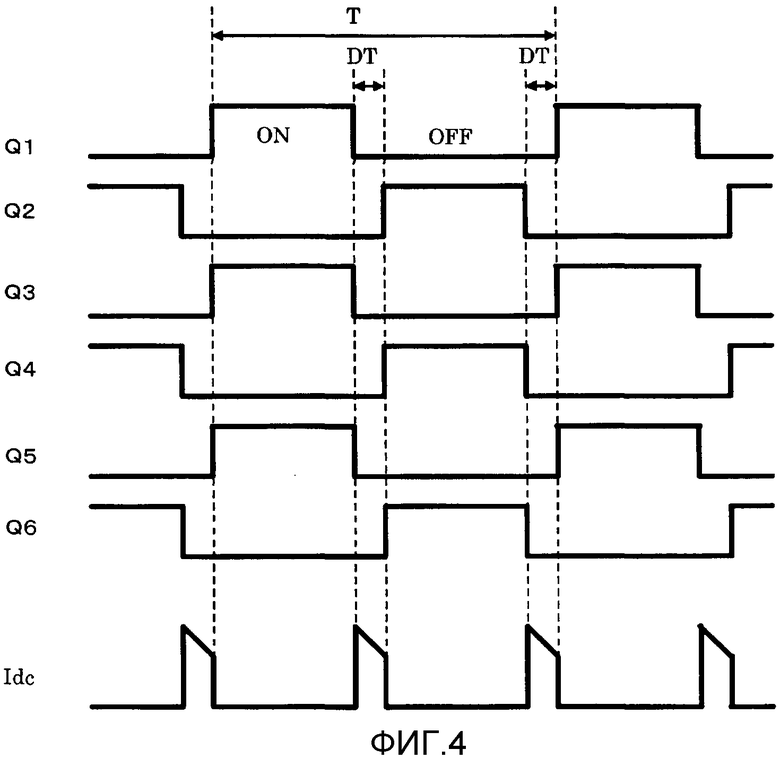
[0011] Фиг. 4 изображает диаграмму временных характеристик отдельных сигналов возбуждения затвора переключающих элементов и временную характеристику электрического тока, протекающего от инвертора к аккумуляторной батарее;
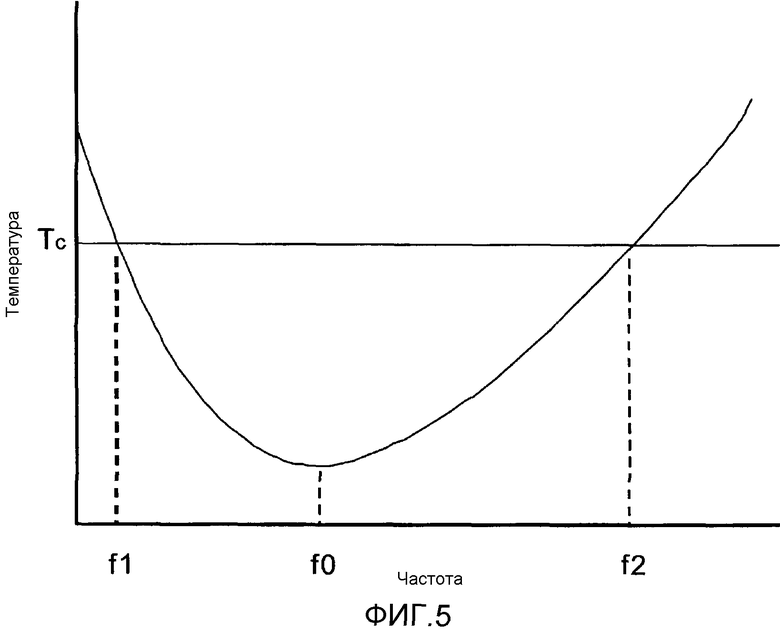
[0012] Фиг. 5 изображает диаграмму температуры в зависимости от частотной характеристики сигнала возбуждения затвора для переключающих элементов;
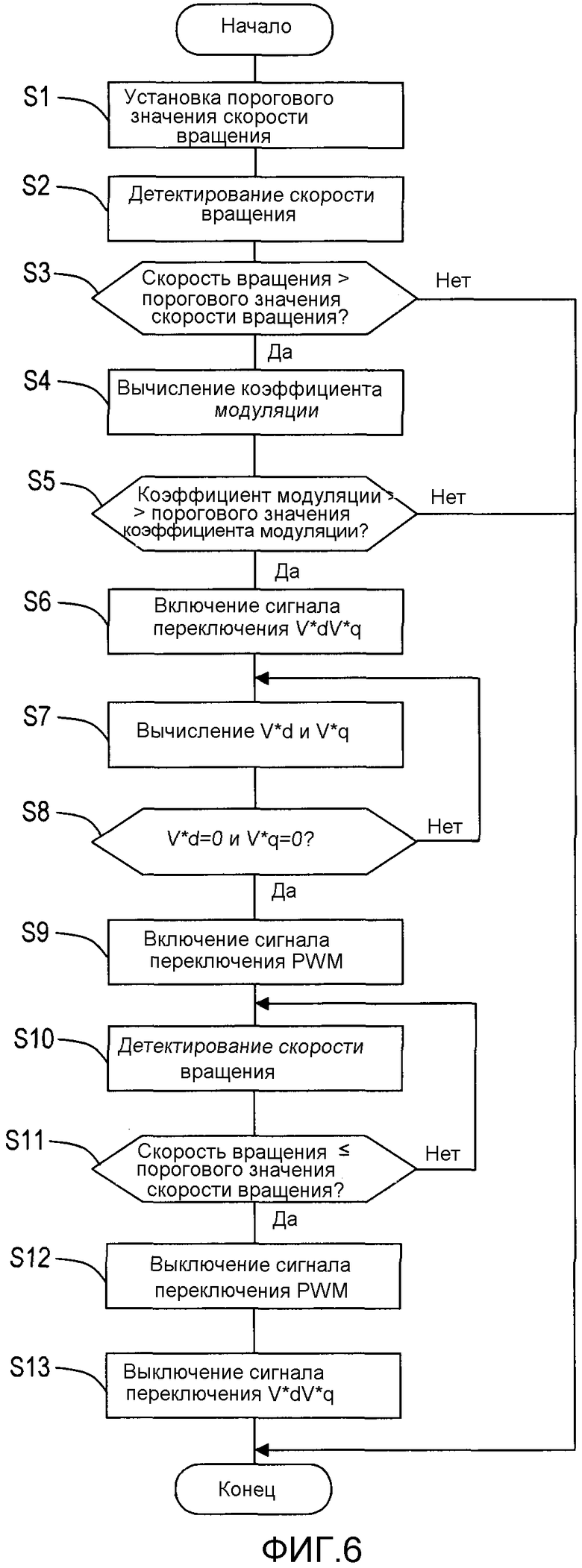
[0013] Фиг. 6 изображает блок-схему последовательности операций, показывающую процедуру управления инверторным устройством, изображенным на фиг. 1; и
[0014] Фиг. 7 изображает диаграмму энергии заряда/разряда аккумуляторной батареи в зависимости от частотной характеристики переключения для инверторного устройства, изображенного на фиг. 1.
Описание предпочтительных вариантов осуществления
[0015] В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылкой на сопроводительные чертежи.
[0016] Обращаясь первоначально к фиг. 1, устройство источника энергии возбуждения схематично изображено для электрического транспортного средства, которое включает в себя инверторное устройство в соответствии с первым вариантом осуществления. Электрическое транспортное средство этого варианта осуществления включает в себя, среди прочего, аккумуляторную батарею 1, реле 2, инвертор 3 и двигатель 4 с постоянным магнитом. Инвертор 3 включает в себя множество переключающих элементов Q1-Q6 (т.е., биполярные транзисторы с изолированным затвором IGBT) и множество выпрямительных элементов D1-D6 (например, диодов). С инверторным устройством, описанным в данном документе, электрический ток, протекающий к инвертору 3, распределяется, по существу, равномерно между переключающими элементами Q1-Q6. В результате, может предотвращаться протекание электрического тока к переключающим элементам Q1-Q6 несбалансированным образом, и срок службы переключающих элементов Q1-Q6 может быть продлен. Также, как обсуждается ниже, инвертор 3 дополнительно включает в себя конденсатор 5, резистор 6, датчик 7 напряжения и схему 8 возбуждения затвора.
[0017] Хотя подробный чертеж не предоставляется, двигатель 4 с постоянным магнитом электрического транспортного средства в этом изображенном варианте осуществления работает от энергии трехфазного переменного тока (AC), которая выступает в качестве источника энергии возбуждения традиционным образом. Двигатель 4 соединен с колесной осью электрического транспортного средства традиционным образом, чтобы предоставлять движущую силу одному или более колесам. Хотя электрическое транспортное средство будет использовано в качестве примера, инверторное устройство может также быть применено к гибридному транспортному средству (HEV).
[0018] В дополнение к вышеупомянутым компонентам, электрическое транспортное средство этого варианта осуществления дополнительно включает в себя контроллер 9 двигателя, контроллер 10 транспортного средства, множество датчиков 11 электрического тока и датчик 12 положения ротора. Аккумуляторная батарея 1 служит в качестве источника электроэнергии для двигателя 4. Аккумуляторная батарея 1 соединена с инвертором 3 через реле 2. Инвертор 3 сконфигурирован с возможностью преобразовывать энергию постоянного тока от аккумуляторной батареи 1 в энергию переменного тока. Аккумуляторная батарея 1 включает в себя, например, множество литий-ионных аккумуляторов или другой тип аккумуляторной батареи. Реле 2 замыкается и размыкается контроллером 11 транспортного средства в соответствии с операцией включения/выключения ключа переключателя зажигания (не изображен) транспортного средства. В частности, реле 2 замыкается, когда ключ переключателя зажигания (не изображен) включается, и реле 2 размыкается, когда ключ переключателя зажигания (не изображен) выключается.
[0019] Выпрямительные элементы D1-D6 соединены параллельно с каждым из переключающих элементов Q1-Q6. Выпрямительные элементы D1-D6 сконфигурированы так, что электрический ток течет в них в направлении, противоположном направлению, в котором электрический ток течет в переключающих элементах Q1-Q6. Инвертор 3 преобразует энергию постоянного тока от аккумуляторной батареи 1 в энергию переменного тока и подает энергию переменного тока двигателю 4. В этом варианте осуществления три схемы, содержащие пару из (двух) переключающих элементов, соединенных последовательно, соединены с аккумуляторной батареей 1 параллельно друг другу. Также каждая из трех входных секций трехфазного двигателя 4 электрически соединена между двумя переключающими элементами пары переключающих элементов. Тот же тип переключающего элемента используется для всех переключающих элементов Q1-Q6. Например, биполярный транзистор с изолированным затвором (IGBT) может быть использован для каждого из переключающих элементов Q1-Q6.
[0020] Как показано на фиг. 1, в этом изображенном варианте осуществления, переключающие элементы Q1 и Q2 соединены вместе последовательно, переключающие элементы Q3 и Q4 соединены вместе последовательно, и переключающие элементы Q5 и Q6 соединены вместе последовательно. Фаза U двигателя 4 подключена между переключающими элементами Q1 и Q2. Фаза V двигателя 4 подключена между переключающими элементами Q3 и Q4. Фаза W двигателя 4 подключена между переключающими элементами Q5 и Q6. Переключающие элементы Q1, Q3 и Q5 электрически соединены с положительным электродом аккумуляторной батареи 1, а переключающие элементы Q2, Q4 и Q6 электрически соединены с отрицательным электродом аккумуляторной батареи 1. Включенное/выключенное состояние каждого из переключающих элементов Q1-Q6 управляется контроллером 10 транспортного средства. Управление переключающими элементами Q1-Q6, выполняемое контроллером 10 транспортного средства, будет объяснено более подробно позже.
[0021] В инверторе 3 конденсатор 5, резистор 6 и датчик 7 напряжения подключены между реле 2 и переключающими элементами Q1-Q6. Конденсатор 5 предусмотрен, чтобы сглаживать энергию постоянного тока, подаваемую от аккумуляторной батареи 1. Датчик 7 напряжения служит, чтобы детектировать напряжение на выводах конденсатора 5. Схема 8 возбуждения затвора служит, чтобы отправлять сигнал затвора каждому из переключающих элементов Q1-Q6 и включать и выключать переключающие элементы Q1-Q6. Схема 8 возбуждения затвора детектирует нарушения перегрева и перегрузки по току в переключающих элементах Q1-Q6. На основе этих детектирований схема 8 возбуждения затвора отправляет сигнал нарушения контроллеру 9 двигателя. Схема 8 возбуждения затвора также принимает сигнал от датчика 7 напряжения и преобразует сигнал до уровня формы волны, который может быть распознан контроллером 9 двигателя, перед отправкой сигнала контроллеру 9 двигателя в качестве сигнала, указывающего напряжение конденсатора 5.
[0022] Контроллер 9 двигателя управляет инвертором 3 и работой двигателя 4. Контроллер 9 двигателя составляет компонент или средство управления. Контроллер 9 двигателя принимает сигнал, указывающий командное значение крутящего момента (T*), выданный из контроллера 10 транспортного средства, сигнал от датчика 12 положения ротора, сигналы обратной связи от датчиков 11 электрического тока и сигнал от датчика 7 напряжения. Контроллер 9 двигателя формирует PWM (широтно-импульсная модуляция) сигнал в соответствии с сигналами, принятыми от этих датчиков и контроллера 10 транспортного средства. Контроллер 9 двигателя отправляет PWM-сигнал схеме 8 возбуждения затвора. Схема 8 возбуждения затвора включает и выключает переключающие элементы Q1-Q6 в предписанный момент времени на основе сигнала широтно-импульсной модуляции.
[0023] Контроллер 10 транспортного средства включает в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM). Контроллер 10 транспортного средства служит в качестве секции управления для управления всем транспортным средством в этом варианте осуществления. Контроллер 10 транспортного средства вычисляет командное значение крутящего момента (T*) на основе сигнала акселератора, сигнала тормоза и сигнала положения вала и отправляет командное значение крутящего момента (T*) контроллеру 9 двигателя. Контроллер 10 транспортного средства также отправляет команду запроса запуска контроллеру 9 двигателя при определении того, что транспортное средство будет приведено в движение, и отправляет команду запроса останова контроллеру 9 двигателя при определении того, что транспортное средство будет остановлено. Контроллер 10 транспортного средства также отправляет информацию о разомкнутом/замкнутом состоянии относительно реле 2 контроллеру 9 двигателя.
[0024] Датчики 11 электрического тока размещены между инвертором 3 и двигателем относительно каждой из соответствующих фаз двигателя 4. Датчики 11 электрического тока служат для того, чтобы детектировать электрические токи (Iu, Iv и Iw), подаваемые каждой из фаз двигателя 4 от инвертора 3. Датчики 11 электрического тока отправляют сигналы, указывающие детектированные электрические токи, контроллеру 9 двигателя. Датчик 12 положения ротора является резольвером, кодером или другим устройством датчика, которое предусмотрено на двигателя 4 и служит для того, чтобы детектировать положение ротора двигателя 4. Датчик 12 положения ротора отправляет детектированное положение ротора контроллеру 9 двигателя.
[0025] Составные признаки контроллера 9 двигателя будут сейчас объяснены более подробно со ссылкой на фиг. 2. Фиг. 2 - это блок-схема контроллера 9 двигателя, включенного в инверторное устройство согласно этому варианту осуществления. Как показано на фиг. 2, контроллер 9 двигателя содержит секцию 21 вычисления командного значения электрического тока, секцию 22 управления электрическим током, секцию 23 dq-трехфазного преобразования, секцию 24 формирования PWM-сигнала, секцию 25 трехфазного-dq преобразования, секцию 26 вычисления фазы, секцию 27 вычисления скорости вращения и секцию 28 управления псевдо трехфазным коротким замыканием. Датчик 12 положения ротора, секция 26 вычисления фазы и секция 27 вычисления скорости вращения составляют компонент или средство детектирования скорости вращения.
[0026] Секция 21 вычисления командного значения электрического тока принимает командное значение (T*) крутящего момента, угловую скорость (ω) двигателя 8, вычисленную секцией 27 вычисления скорости вращения, и детектированное напряжение (Vdc) конденсатора 5, детектированное датчиком 7 напряжения. Секция 21 вычисления командного значения электрического тока ссылается на таблицу соответствия, чтобы вычислять пару командных значений электрического тока по dq-оси (i*d, i*q), указывающих целевое значение переменного тока, подаваемого к двигателя 4 от инвертора 3. Таблица соответствия использует командное значение (T*) крутящего момента, угловую скорость (ω) и напряжение (Vdc) в качестве указателей. Таблица соответствия сохраняется в секции 21 вычисления командного значения электрического тока заранее для определения командных значений электрического тока по dq-оси (i*d, i*q). Таблица соответствия сконфигурирована с возможностью выводить оптимальное командное значение для минимизации потери инвертора 3 и потери двигателя 4 для данного набора входных данных. Значения по d и q-оси указывают координаты в полярной системе координат.
[0027] Секция 22 управления электрическим током принимает командные значения электрического тока по dq-оси (i*d, i*q) и пару электрических токов по dq-оси (id, iq), выведенных из секции 25 трехфазного-dq преобразования, и вычисляет пару командных значений (V*d, V*q) напряжения по dq-оси. Секция 22 управления электрическим током также устанавливает командные значения (V*d, V*q) напряжения по dq-оси в ноль, когда она принимает сигнал переключения Vd*Vq* от секции 28 управления псевдо трехфазным коротким замыканием.
[0028] Секция 23 dq-трехфазного преобразования принимает командные значения (V*d, V*q) напряжения по dq-оси и значение (θ) детектирование фазы от секции 26 вычисления фазы и преобразует командные значения (V*d, V*q) напряжения по dq-оси в полярной системе координат в набор командных значений (V*u, V*v, V*w) напряжения в фиксированной системе координат, имеющей u-ось, v-ось и w-ось. Секция 23 dq-трехфазного преобразования выводит командные значения (V*u, V*v, V*w) напряжения, получающиеся в результате преобразования, в секцию 24 формирования PWM-сигнала.
[0029] Секция 24 формирования PWM-сигнала формирует PWM-сигнал для управления переключением переключающих элементов Q1-Q6 на основе детектированного напряжения (Vdc) конденсатора 5 и командных значений (V*u, V*v, V*w) напряжения и отправляет PWM-сигнал инвертору 3. Когда секция 24 формирования PWM-сигнала принимает сигнал переключения PWM от секции 28 управления псевдо трехфазным коротким замыканием, секция 24 формирования PWM-сигнала отправляет PWM-сигнал, изображенный на фиг. 4 (объясненный позже).
[0030] Секция 25 трехфазного-dq преобразования является секцией управления, служащей для преобразования из трех фаз в две фазы. Она принимает фазные токи (iu, iv и iw) и детектированное фазовое значение (θ) от секции 26 вычисления фазы и преобразует фазные токи (iu, iv, iw), указанные в фиксированных координатах, в фазные токи (id, iq), указанные в полярных координатах. Секция 25 трехфазного-dq преобразования также отправляет фазные токи (id, iq), указанные в полярных координатах, получающиеся в результате преобразования, секции 22 управления электрическим током.
[0031] Секция 26 вычисления фазы вычисляет фазовый угол (θ) ротора на основе сигнала, отправленного от датчика 12 положения ротора, указывающего положение ротора двигателя 4, и отправляет вычисленную фазу (6) в секцию 23 dq-трехфазного преобразования, секцию 25 трехфазного-dq преобразования и секцию 27 вычисления скорости вращения. Секция 27 вычисления скорости вращения вычисляет скорость вращения (электрическую угловую скорость) (ω) посредством дифференцирования фазового угла (θ) и отправляет вычисленную угловую скорость в секцию 21 вычисления командного значения электрического тока и секцию 28 управления псевдо коротким замыканием.
[0032] Секция 28 управления псевдо трехфазным коротким замыканием определяет, отсоединять ли электрически двигателя 4 от аккумуляторной батареи 1 (источника энергии постоянного тока), на основе детектированного напряжения (Vdc) конденсатора 5, командных значений (V*d, V*q) напряжения на dq-оси, и скорости (ω) вращения. На основе результата определения секция 28 управления псевдо трехфазным коротким замыканием формирует сигнал переключения Vd*-Vq* и сигнал переключения PWM и отправляет сигнал переключения Vd*-Vq* в секцию 22 управления электрическим током, а сигнал переключения PWM в секцию 24 формирования PWM-сигнала.
[0033] Во время управления крутящим моментом двигателя 4 существует вероятность того, что скорость вращения двигателя 4 будет возрастать до момента, когда выходное напряжение инвертора достигнет уровня насыщения, и соответствующее целевое значение электрического тока не может быть установлено. Когда это происходит, управление командным значением крутящего момента становится неустойчивым, и существует вероятность того, что характер поведения транспортного средства станет неустойчивым.
[0034] В этом варианте осуществления, как сейчас будет объяснено, управление выполняется, чтобы сдерживать скорость вращения двигателя 4 до скорости вращения, равной или меньшей, чем предписанное пороговое значение, когда скорость вращения двигателя 4 превысила предписанное пороговое значение. Кроме того, для того, чтобы предотвращать концентрацию электрического тока, протекающего в инверторе 3, в определенных переключающих элементах среди переключающих элементов Q1-Q6 во время управления сдерживанием скорости вращения, секция 28 управления псевдо трехфазным коротким замыканием выполняет управление, чтобы распределять электрический ток, протекающий к инвертору 3, между переключающими элементами Q1-Q6.
[0035] Управление инверторным устройством согласно этому варианту осуществления сейчас будет объяснено с помощью фиг. 3-5. Фиг. 3 - это график, изображающий пороговое значение скорости вращения в зависимости от характеристики напряжения для конденсатора 5. Фиг. 4 - это график, изображающий временные характеристики отдельных сигналов возбуждения затвора переключающих элементов Q1-Q6 и временную характеристику электрического тока, протекающего от инвертора 3 к аккумуляторной батарее 1. Фиг. 5 - это график, изображающий температуру в зависимости от частотной характеристики сигнала возбуждения затвора для переключающих элементов Q1-Q6.
[0036] Секция 28 управления псевдо трехфазным коротким замыканием имеет пороговое значение (ωc) скорости вращения, заданное в ней в качестве порогового значения для определения состояния управления инвертором 3. Если скорость вращения двигателя 4 большая, тогда обратное напряжение, индуцированное двигателем, становится большим. Между тем, если напряжение конденсатора является низким, тогда управление становится неустойчивым. Следовательно, когда скорость (ω) вращения, вычисленная секцией 27 вычисления скорости вращения, становится выше, чем пороговое значение (ωс) скорости вращения, секция 28 управления псевдотрехфазным коротким замыканием определяет, что существует вероятность неустойчивости управления.
[0037] Секция 28 управления псевдо трехфазным коротким замыканием устанавливает пороговое значение (ωc) скорости вращения на основе детектированного напряжения (Vdc) на конденсаторе 5. Даже если обратное напряжение, индуцированное двигателем 4, является высоким, разность напряжения между входной и выходной сторонами инвертора 3 будет небольшой, и состояние управления инвертором 3 будет устойчивым, если детектированное напряжение (Vdc) конденсатора 5 является высоким. Следовательно, пороговое значение (ωc) скорости вращения устанавливается на большое значение, когда детектированное напряжение (Vdc) конденсатора 5 является высоким, и пороговое значение (ωc) скорости вращения устанавливается на небольшое значение, когда детектированное напряжение (Vdc) конденсатора 5 является низким. Таким образом, как показано на фиг. 3, пороговое значение (ωc) скорости вращения пропорционально детектированному напряжению конденсатора 5, и секция 28 управления псевдотрехфазным коротким замыканием устанавливает пороговое значение (ωc) скорости вращения на большее значение в соответствии с более высокими детектированными напряжениями (Vdc) конденсатора 5.
[0038] В дополнение к определению состояния управления на основе скорости (ω) вращения секция 28 управления псевдотрехфазным коротким замыканием определяет состояние управления на основе коэффициента модуляции инвертора 3. Секция 28 управления псевдотрехфазным коротким замыканием сначала вычисляет коэффициент модуляции (M) на основе напряжения (Vdc), детектированного датчиком 7 напряжения, и командных значений (V*d, V*q) напряжения по dq-оси из секции 22 управления электрическим током с помощью уравнения (1), показанного ниже.
[0039]  (1)
(1)
[0040] Коэффициент модуляции (M) указывает отношение напряжения, поданного на двигатель 4, к напряжению постоянного тока аккумуляторной батареи 1. Известно, что, когда коэффициент модуляции (M) превышает 1, форма волны напряжения, подаваемого на двигатель 4, не является синусоидальной, а, вместо этого, искажена.
[0041] Секция 28 управления псевдотрехфазным коротким замыканием устанавливает предписанное пороговое значение (Mc) коэффициента модуляции для определения состояния управления инвертором 3. Секция 28 управления псевдотрехфазным коротким замыканием определяет, что состояние управления может быть неустойчивым, если вычисленный коэффициент модуляции (M) выше, чем пороговое значение (Mc) коэффициента модуляции.
[0042] Когда скорость (ω) вращения выше, чем пороговое значение (ωc) скорости вращения, и коэффициент модуляции M выше, чем пороговое значение (Mc) коэффициента модуляции, секция 28 управления псевдотрехфазным коротким замыканием передает сигнал переключения Vd*Vq* в секцию 22 управления электрическим током и выполняет управление, чтобы сводить командные значения (V*d, V*q) напряжения по dq-оси к нулю. Когда секция 22 управления электрическим током принимает сигнал переключения Vd*Vq*, секция 22 управления электрическим током прекращает следовать принятым командным значениям (i*d, i*q) электрического тока и электрическим токам (id, iq) по dq-оси и постепенно смещает командные значения (V*d, V*q) по dq-оси к нулю. Примером способа постепенного перемещения командных значений (V*d, V*q) напряжения по dq-оси к нулю является применение обработки низкочастотным фильтром к командному значению напряжения, использующей командные значения (V*d, V*q) напряжения по dq-оси, существующие непосредственно перед тем, как был принят сигнал переключения Vd*Vq*.
[0043] Когда командные значения (V*d, V*q) напряжения по dq-оси сведены к нулю, секция 28 управления псевдотрехфазным коротким замыканием отправляет сигнал переключения PWM в секцию 24 формирования PWM-сигнала и выполняет управление так, что электрическому току, получающемуся в результате рекуперативного управления двигателем 4, запрещается протекать только к определенным переключающим элементам среди переключающих элементов Q1-Q6 несбалансированным образом.
[0044] Когда секция 24 формирования PWM-сигнала принимает сигнал переключения PWM, секция 24 формирования PWM-сигнала попеременно выполняет управление, чтобы включать переключающие элементы Q1, Q3 и Q5, соединенные с положительной стороной аккумуляторной батареи 1, и выключать переключающие элементы Q2, Q4 и Q6, соединенные с отрицательной стороной аккумуляторной батареи 1 (далее в данном документе называемое "первым управлением переключением"), и управление, чтобы включать переключающие элементы Q2, Q4 и Q6 и выключать переключающие элементы Q1, Q3 и Q5 (далее в данном документе называемое "вторым управлением переключением").
[0045] Таким образом, как показано на фиг. 3, периоды, в течение которых переключающие элементы Q1, Q3 и Q5 включены, и периоды, в течение которых переключающие элементы Q2, Q4 и Q6 включены, не перекрываются. Переключающие элементы Q2, Q4 и Q6 выключены в течение периодов, когда переключающие элементы Q1, Q3 и Q5 включены, и переключающие элементы Q1, Q3 и Q5 выключены в течение периодов, когда переключающие элементы Q2, Q4 и Q6 включены. На фиг. 4, термин T - это период сигнала возбуждения затвора, а термин DT − это время простоя. Период цикла, в котором каждый из переключающих элементов Q1-Q6 включается и выключается, является одинаковым, и разность фаз равна нулю. Периоды (DT) простоя, в течение которых все переключающие элементы Q1-Q6 выключены, предусмотрены между соответствующими периодами включения и периодами выключения переключающих элементов Q1-Q6. Таким образом, продолжительность периодов, в течение которых первое управление переключением выполняется, чтобы включать переключающие элементы Q1, Q3 и Q5 и выключать переключающие элементы Q2, Q4 и Q6, равна продолжительности периодов, в течение которых второе управление переключением выполняется, чтобы включать переключающие элементы Q2, Q4 и Q6 и выключать переключающие элементы Q1, Q3 и Q5. Также периоды простоя предусмотрены между выполнениями первого управления переключением и выполнениями второго управления переключением.
[0046] Обратный ток, вызванный напряжением, индуцированным двигателем 4, течет между двигателем 4 и инвертором 3 в течение периодов, когда переключающие элементы Q1, Q3 и Q5 включены, и периодов, когда переключающие элементы Q2, Q4 и Q6 включены, т.е., в течение периодов, отличных от периодов простоя. Как показано на фиг. 3, обратный ток течет от инвертора 3 к аккумуляторной батарее 1 и действует как рекуперативный электрический ток (Idc) во время периодов простоя. Когда обратный электрический ток течет через инвертор 3, обратный электрический ток либо течет через переключающие элементы Q1, Q3 и Q5, а не через переключающие элементы Q2, Q4 и Q6, либо течет через переключающие элементы Q2, Q4 и Q6, а не через переключающие элементы Q1, Q3 и Q5. Как результат, обратный ток не течет только через определенные переключающие элементы несбалансированным образом, а, вместо этого, может быть распределен на все переключающие элементы Q1-Q6.
[0047] Секция 24 формирования PWM-сигнала принимает сигнал переключения PWM и задает частоту, с которой переключающие элементы Q1-Q6 включаются и выключаются (далее в данном документе называемую "частотой переключения") во время управления переключающими элементами Q1-Q6. Как показано на фиг. 5, частота переключения устанавливается в частоту, лежащую в диапазоне, расположенном от частоты f1 до частоты f2. Частота переключения соответствует частоте, с которой инвертор 3 многократно переключается между состоянием, в котором переключающие элементы Q1, Q3 и Q5 включены одновременно, и состоянием, в котором переключающие элементы Q2, Q4 и Q6 включены одновременно.
[0048] Как показано на фиг. 5, кривая характеристики температуры переключающих элементов Q1-Q6 имеет минимум при частоте f0 переключения. Если частота переключения увеличивается от частоты f0 переключения, тогда температура переключающих элементов Q1-Q6 будет увеличиваться, поскольку потери на переключение увеличиваются, когда частота переключения увеличивается. Между тем, если частота переключения уменьшается от частоты f0 переключения, тогда потери на переключение, по существу, равны нулю, и потери на электропроводность увеличиваются. Когда частота переключения уменьшается, температура переключающих элементов Q1-Q6 колеблется, и амплитуда колебаний увеличивается, чем больше уменьшается частота переключения. Следовательно, температура переключающих элементов Q1-Q6 увеличивается, когда частота переключения уменьшается от частоты f0 переключения.
[0049] На фиг. 5 температура Tc переключающего элемента, соответствующая частоте f1 переключения и частоте f2 переключения, является допустимой температурой, при которой переключающие элементы Q1-Q6 могут гарантированно работать правильно. Следовательно, в этом варианте осуществления, секция 24 формирования PWM-сигнала сконфигурирована с возможностью устанавливать частоту переключения на частоту между частотой f1 и частотой f2, чтобы предотвращать превышение температурой переключающих элементов Q1-Q6 допустимой температуры и достижение перегретого состояния.
[0050] Как объяснено выше, когда скорость вращения двигателя 4 становится больше, чем пороговое значение скорости вращения, контроллер 9 двигателя выполняет первое управление переключением и второе управление переключением попеременно относительно переключающих элементов Q1-Q6. Между тем, когда скорость вращения двигателя 4 становится равной или меньшей, чем пороговое значение скорости вращения, контроллер 9 двигателя устанавливает целевое значение электрического тока на командное значение крутящего момента или другое внешнее входное значение и формирует PWM-сигнал относительно переключающих элементов Q1-Q6 на основе целевого значения электрического тока. Таким образом, контроллер 9 двигателя изменяет управление с чрезмерного на нормальное или регулярное относительно переключающих элементов Q1-Q6.
[0051] Процедура управления, выполняемая инверторным устройством согласно этому варианту осуществления, сейчас будет объяснена с помощью фиг. 1, 2 и 6. Фиг. 6 - это блок-схема последовательности операций, изображающая процедуру управления инверторным устройством согласно этому варианту осуществления.
[0052] На этапе S1 контроллер 9 двигателя использует характеристику, показанную на фиг. 3, чтобы установить пороговое значение (ωc) скорости вращения на основе напряжения, детектированного датчиком 7 напряжения. На этапе S2 контроллер 9 двигателя детектирует скорость вращения двигателя 4 на основе сигнала от датчика 12 положения ротора. На этапе S3 контроллер 9 двигателя сравнивает детектированную скорость вращения с пороговым значением (ωc) скорости вращения. Если скорость (ω) вращения равна или меньше, чем пороговое значение (ωc) скорости вращения, тогда процесс управления заканчивается. Между тем, если скорость (ω) вращения больше, чем пороговое значение (ωc) скорости вращения, тогда контроллер 9 двигателя переходит к этапу S4.
[0053] На этапе S4 контроллер 9 двигателя использует уравнение 1, чтобы вычислять коэффициент модуляции (M) на основе напряжения, детектированного датчиком 7 напряжения и командных значений (V*d, V*q) напряжения по dq-оси из секции 22 управления электрическим током. На этапе S5 контроллер 9 двигателя сравнивает коэффициент модуляции (M) с пороговым значением (Mc) коэффициента модуляции. Если коэффициент модуляции (M) равен или меньше, чем пороговое значение (Mc) коэффициента модуляции, тогда процесс управления заканчивается. Между тем, если коэффициент модуляции (М) больше, чем пороговое значение (Mc) коэффициента модуляции, тогда контроллер 9 двигателя переходит к этапу S6.
[0054] На этапе S6 контроллер 9 двигателя включает сигнал переключения Vd*Vq* секции 28 управления псевдотрехфазным коротким замыканием. Секция 28 управления псевдотрехфазным коротким замыканием отправляет сигнал переключения Vd*Vq* в секцию 22 управления электрическим током и сводит командные значения (V*d, V*q) напряжения по dq-оси к нулю. Когда контроллер 9 двигателя сводит командные значения (V*d, V*q) напряжения по dq-оси к нулю, контроллер 9 двигателя вычисляет командные значения (V*d, V*q) напряжения по dq-оси (этап S7) и определяет, достигли ли командные значения (V*d, V*q) напряжения по dq-оси нуля (этап S8). Если командные значения (V*d, V*q) d-q-напряжения не достигли нуля, контроллер 9 двигателя возвращается к этапу S7. Если командные значения (V*d, V*q) напряжения по dq-оси достигли нуля, контроллер 9 двигателя переходит к этапу S9.
[0055] На этапе S9 контроллер 9 двигателя включает сигнал переключения PWM секции 28 управления псевдо трехфазного короткого замыкания. Секция 28 управления псевдотрехфазным коротким замыканием отправляет сигнал переключения PWM в секцию 22 управления электрическим током и выполняет первое управление переключением и второе управление переключением относительно переключающих элементов Q1-Q6 поочередным образом.
[0056] Контроллер 9 двигателя детектирует скорость вращения двигателя 4 на основе сигнала от датчика 12 положения ротора (этап S10) и сравнивает детектируемую скорость вращения с пороговым значением (ωc) скорости вращения (этап S11). Если скорость (ω) вращения больше, чем пороговое значение (ωc) скорости вращения, тогда контроллер двигателя возвращается к этапу S10. Если скорость (ω) вращения равна или меньше, чем пороговое значение (ωc) скорости вращения, тогда контроллер двигателя переходит к этапу S12.
[0057] Контроллер 9 двигателя выключает сигнал переключения PWM секции 28 управления псевдотрехфазным коротким замыканием (этап S12), выключает сигнал переключения Vd*Vq* секции 28 управления псевдотрехфазного короткого замыкания и возвращается к регулярному (нормальному) управлению переключением, заканчивая последовательность управления.
[0058] Как объяснено выше, в этом варианте осуществления, первое управление переключением и второе управление переключением выполняются попеременно, когда скорость (ω) вращения больше, чем пороговое значение (ωc) скорости вращения. В результате, скорость вращения электродвигателя 4 может сдерживаться, и ток, протекающий в инверторе 3, может быть распределен на переключающие элементы Q1-Q6 равномерно. Таким образом, ситуация, в которой только некоторые переключающие элементы среди переключающих элементов Q1-Q6 достигают высокой температуры и несут большие потери на переключение, может быть предотвращена. Как результат, управление инвертора 3 может быть стабилизировано, и срок службы переключающих элементов Q1-Q6 может быть продлен.
[0059] В этом варианте осуществления, чем выше становится напряжение аккумуляторной батареи 1, тем больше значение, в которое устанавливается пороговое значение (ωc) скорости вращения. В результате, инвертор может управляться в широком диапазоне скоростей вращения в соответствии с напряжением аккумуляторной батареи 1.
[0060] В этом варианте осуществления, в дополнение к условию, относящемуся к скорости вращения двигателя 4, состояние, в котором коэффициент модуляции (M) выше, чем пороговое значение (Mc) коэффициента модуляции, также используется в качестве условия для выполнения первого управления переключением и второго управления переключением. В результате, регулярное (нормальное) управление инвертором 3 может выполняться вплоть до ограничения, когда управление отклоняется, и диапазон, в котором инвертор 3 может управляться устойчивым образом, может быть расширен.
[0061] В этом варианте осуществления, контроллер 9 двигателя переключается с попеременного выполнения первого управления переключением и второго управления переключением на регулярное (нормальное) управление, когда скорость (ω) вращения двигателя 4 становится равной или меньшей, чем пороговое значение (ωc) скорости вращения. Таким образом, поскольку регулярное (нормальное) управление возобновляется, когда скорость (ω) вращения электромотора 4 уменьшается, инверторное устройство этого варианта осуществления может продолжать работать без отключения. Как результат, транспортное средство, в котором инверторное устройство согласно этому варианту осуществления установлено, может продолжать двигаться.
[0062] В этом варианте осуществления, во время первого управления переключением и второго управления переключением, частота переключения задается в диапазоне, проходящем от частоты f1 до частоты f2, так что температуры переключающих элементов Q1-Q6 остаются в допустимом температурном диапазоне. В результате, может не допускаться достижение переключающими элементами Q1-Q6 чрезмерной температуры.
[0063] Хотя в варианте осуществления частота переключения задана в диапазоне, проходящем от частоты f1 до частоты f2, приемлемо устанавливать частоту переключения в частоту f0, показанную на фиг. 5. В результате, может не допускаться достижение переключающими элементами Q1-Q6 чрезмерной температуры.
[0064] В этом варианте осуществления приемлемо устанавливать частоту переключения на частоту, меньшую, чем частота переключения, используемая во время регулярного (обычного) управления, когда скорость вращения равна или ниже порогового значения (ωc) скорости вращения. В качестве способа установки частоты переключения в частоту, меньшую, чем частота, используемая во время регулярного (нормального) управления, приемлемо использовать обычный способ, в котором период цикла прерывания для PWM-управления, выполняемого центральным процессором CPU контроллера 9 двигателя, продлен. Или, в целях безопасности, когда детектирован отказ, период цикла прерывания может быть оставлен при нормальном периоде, и переключение с более длинным периодом может выполняться с помощью внутреннего счетчика. В последнем способе командные значения (Vd*Vq*) напряжения по dq-оси игнорируются, и переключение не выполняется согласно значениям Vd*=Vq*=0. Вместо этого, управление выполняется так, что переключающие элементы со стороны высокого напряжения задействуются с режимом одновременного включения 100%, а переключающие элементы со стороны низкого напряжения задействуются с режимом одновременного включения 0% многократно в течение предписанного интервала времени. Таким образом, отношение времени простоя к периоду T уменьшается, и рекуперативная электрическая энергия, идущая к аккумуляторной батарее 1, уменьшается, так что перезаряд аккумуляторной батареи 1 может быть предотвращен. Также, потери на переключение переключающих элементов Q1-Q6 могут быть уменьшены, и эффективность инвертора 3 может быть улучшена.
[0065] В этом варианте осуществления приемлемо устанавливать частоту переключения так, что электрическая энергия, подаваемая от двигателя 4 к инвертору 3 вследствие рекуперативного управления двигателя 4, равна потере электрической энергии в инверторе 3. Потеря в инверторе 3 включает в себя потери, вызванные внутренними сопротивлениями в переключающих элементах Q1-Q6 и диодах D1-D6, и потерю, возникающую от резистора 6.
[0066] Частота, установленная в таком случае, сейчас будет объяснена со ссылкой на фиг. 7. Фиг. 7 - это график энергии заряда/разряда аккумуляторной батареи в зависимости от частотной характеристики переключения, в котором положительная сторона вертикальной оси указывает заряд, а отрицательная сторона указывает разряд. Энергия заряда/разряда аккумуляторной батареи 1 указывает электрическую энергию, идущую от инвертора 3 к аккумуляторной батарее 1. Эта электрическая энергия следует тенденции, в которой величина электрической энергии заряда увеличивается, когда частота увеличивается, и величина электрической энергии разряда увеличивается, когда частота уменьшается. Энергия заряда/разряда аккумуляторной батареи 1 равна сумме установившегося состояния электрической энергии разряда, вызванной резистором 6, и электрической энергии заряда, вызванной рекуперативным состоянием, возникающим в течение периодов времени простоя во время переключения инвертора. Электрическая энергия заряда, получающаяся в результате рекуперации, меньше, когда частота переключения ниже, и становится равной 0, если переключение не выполняется. Следовательно, электрическая энергия заряда/разряда следует характеристике, увеличивающейся пропорционально частоте переключения.
[0067] Контроллер 9 двигателя устанавливает частоту переключения в частоту f3 (см. фиг. 7), так что электрическая энергия, подаваемая инвертору 3 от двигателя 4, равняется потере электрической энергии, возникающей в инверторе, и электрическая энергия заряда/разряда становится равной 0. В результате, аккумуляторная батарея 1 и инвертор 3 могут быть электрически отделены друг от друга, и может быть предотвращено подвергание аккумуляторной батареи 1 чрезмерному заряду или чрезмерному разряду.
[0068] В этом варианте осуществления также приемлемо исключить слышимый частотный диапазон (приблизительно 10 Гц - 20 кГц) при установке частоты переключения. Таким образом, пассажиры и другие люди в области, окружающей транспортное средство могут быть защищены от восприятия неприятного шума.
[0069] Хотя только выбранные варианты осуществления являются предпочтительными для того, чтобы иллюстрировать настоящее изобретение, специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что различные изменения и модификации могут выполняться в данном документе без отступления от объема изобретения, заданного в прилагаемой формуле изобретения. Таким образом, предшествующие описания вариантов осуществления согласно настоящему изобретению предоставлены только для иллюстрации, а не с целью ограничения изобретения, которое определено прилагаемой формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИНСТРУМЕНТ | 2015 |
|
RU2676194C2 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2011 |
|
RU2525863C1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2515474C2 |
| СПОСОБ И СИСТЕМА ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОДНОФАЗНЫХ ИНВЕРТОРОВ И ИНВЕРТОР | 2019 |
|
RU2756177C1 |
| КОНТРОЛЛЕР ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2019 |
|
RU2706928C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2395410C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2643079C1 |
| РЕГУЛЯТОР МОЩНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ РЕГУЛЯТОРОМ МОЩНОСТИ | 2007 |
|
RU2381610C1 |
| БЕСТРАНСФОРМАТОРНЫЙ МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ СРЕДНЕГО НАПРЯЖЕНИЯ И СПОСОБ ДЛЯ УПРАВЛЕНИЯ БЕСТРАНСФОРМАТОРНЫМ МНОГОУРОВНЕВЫМ ПРЕОБРАЗОВАТЕЛЕМ СРЕДНЕГО НАПРЯЖЕНИЯ | 2015 |
|
RU2693573C1 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |

Изобретение относится к области электротехники и может быть использовано для управления инверторным устройством. Техническим результатом является увеличение срока службы переключающих элементов. Инверторное устройство в своей основе включает в себя инвертор (3), компонент (12, 26, 27) детектирования скорости вращения и компонент (9) управления. Инвертор (3) включает в себя множество пар переключающих элементов (Q1-Q6). Компонент (9) управления управляет состоянием включения-выключения переключающих элементов (Q1-Q6), чтобы преобразовывать постоянный ток от источника (1) энергии постоянного тока в переменный ток, попеременно выполняя первое и второе управления, когда скорость вращения двигателя (4), соединенного с переключающими элементами, больше, чем предписанная скорость вращения. Первое управление включает переключающие элементы (Q1, Q3, Q5), которые непосредственно соединены с положительным электродом источника энергии, и выключает переключающие элементы (Q2, Q4, Q6), которые непосредственно соединены с отрицательным электродом источника энергии. Второе управление включает переключающие элементы (Q2, Q4, Q6), которые непосредственно соединены с отрицательным электродом, и выключает переключающие элементы (Q1, Q3, Q5), которые непосредственно соединены с положительным электродом. 2 н. и 9 з.п. ф-лы, 7 ил.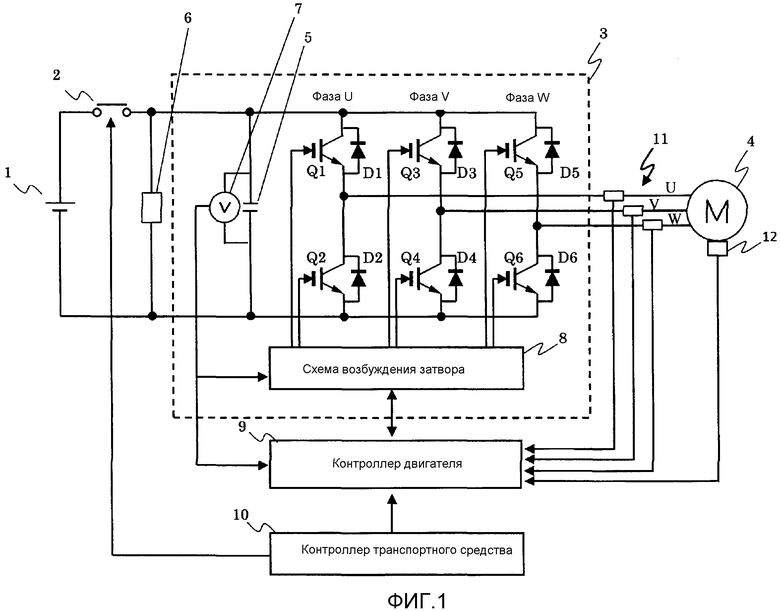
1. Инверторное устройство, содержащее:
инвертор, включающий в себя множество пар переключающих элементов, причем каждая из пар переключающих элементов электрически соединена с источником энергии постоянного тока;
компонент детектирования скорости вращения, который детектирует скорость вращения двигателя, который электрически соединен с парой переключающих элементов; и
компонент управления, который управляет состоянием включения-выключения переключающих элементов, чтобы преобразовывать электрическую энергию постоянного тока от источника энергии постоянного тока в электрическую энергию переменного тока,
при этом компонент управления дополнительно попеременно выполняет первое управление переключением и второе управление переключением при детектировании того, что скорость вращения больше, чем предписанная скорость вращения,
первое управление переключением включает все переключающие элементы из пары переключающих элементов, соединенных с положительным электродом источника электрической энергии постоянного тока, и выключает все переключающие элементы из пары переключающих элементов, соединенных с отрицательным электродом источника электрической энергии постоянного тока, и
второе управление переключением включает все переключающие элементы из пары переключающих элементов, соединенных с отрицательным электродом источника электрической энергии постоянного тока, и выключает все переключающие элементы из пары переключающих элементов, соединенных с положительным электродом источника электрической энергии постоянного тока.
2. Инверторное устройство по п. 1, в котором
компонент управления управляет переключающими элементами так, что период времени, в течение которого выполняется первое управление переключением, равен периоду времени, в течение которого выполняется второе управление переключением.
3. Инверторное устройство по п. 1, в котором
компонент управления устанавливает предписанную скорость вращения так, что, когда напряжение источника энергии постоянного тока становится выше, значение, на которое предписанная скорость вращения устанавливается, становится больше.
4. Инверторное устройство по п. 1, в котором
компонент управления поочередно выполняет первое и второе управления переключением при определении того, что коэффициент модуляции, который указывает отношение напряжения, подаваемого на двигатель, к напряжению постоянного тока источника энергии постоянного тока, выше, чем предписанный коэффициент модуляции.
5. Инверторное устройство по п. 1, в котором
компонент управления переходит от управления, попеременно выполняющего первое и второе управления переключением, к регулярному управлению переключением при детектировании того, что скорость вращения стала меньше, чем предписанная скорость вращения.
6. Инверторное устройство по п. 1, в котором
компонент управления устанавливает частоту, с которой переключающие элементы включаются и выключаются во время попеременного выполнения первого и второго управлений переключением, на более низкую частоту, чем частота, с которой переключающие элементы включаются и выключаются при детектировании того, что скорость вращения равна или меньше, чем предписанная скорость вращения.
7. Инверторное устройство по п. 1, в котором
компонент управления устанавливает частоту, при которой переключающие элементы включаются и выключаются во время попеременного выполнения первого и второго управлений переключением, так что температура переключающих элементов лежит в предписанном допустимом температурном диапазоне.
8. Инверторное устройство по п. 7, в котором
компонент управления устанавливает частоту так, что температура переключающих элементов равна самой низкой температуре из предписанного допустимого температурного диапазона.
9. Инверторное устройство по п. 1, в котором
компонент управления устанавливает частоту, при которой переключающие элементы включаются и выключаются во время попеременного выполнения первого и второго управлений переключением, так что электрическая энергия, подаваемая к инвертору от двигателя вследствие управления рекуперацией двигателя, для зарядки аккумуляторной батареи, равна потере электрической энергии в инверторе.
10. Инверторное устройство по п. 1, в котором
компонент управления устанавливает частоту, при которой переключающие элементы включаются и выключаются во время попеременного выполнения первого и второго управлений переключением так, чтобы исключить слышимый частотный диапазон.
11. Способ управления инвертором, содержащий этапы, на которых:
управляют состояниями включения-выключения множества пар переключающих элементов, электрически соединенных, соответственно, с источником энергии постоянного тока, так, что электрическая энергия постоянного тока от источника энергии постоянного тока преобразуется в электрическую энергию переменного тока и подается к двигателю;
детектируют скорость вращения двигателя; и
попеременно выполняют первое управление переключением и второе управление переключением при детектировании того, что скорость вращения больше, чем предписанная скорость вращения,
выполнение первого управления переключением осуществляют посредством включения всех переключающих элементов из пары переключающих элементов, которые соединены с положительным электродом источника электрической энергии постоянного тока, и выключения всех переключающих элементов из пары переключающих элементов, которые соединены с отрицательным электродом источника электрической энергии постоянного тока, и
второе управление переключением выполняют посредством включения всех переключающих элементов из пары переключающих элементов, которые соединены с отрицательным электродом источника электрической энергии постоянного тока, и выключения всех переключающих элементов из пары переключающих элементов, которые соединены с положительным электродом источника электрической энергии постоянного тока.
| СИСТЕМА ПРИВОДА ДВИГАТЕЛЯ С ПЕРЕМЕННЫМ МАГНИТНЫМ ПОТОКОМ | 2007 |
|
RU2397600C1 |
| КЛАПАН ДЛЯ ГАЗОВОГО ИЛИ ПАРОВОГО ДВИГАТЕЛЯ | 1950 |
|
SU86810A1 |
| RU 239760136 С1, (20.08.2010 | |||
| DE 102006047692 A1, 10.04.2008 | |||
| WO 9705691 A1, 13.02.1997 | |||

