Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и может быть использовано для регулирования движения поездов.
«Уровень техники»
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным расположением аппаратуры [Типовые материалы для проектирования 410306-ТМП, АВТОБЛОКИРОВКА С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ, АБТЦ-03. ОАО «РЖД» Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ». 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впередилежащих путевых участках передается с помощью оптических устройств и системы АЛС.
Недостатками системы является использование напольных и локомотивных светофоров, большая жильность кабеля, невысокая точность определения координат хвоста поезда, а также стандартные требования для каждого из блок-участков по их длине с целью обеспечения снижения скорости или полной остановки поезда, использование нескольких несущих и модулирующих частот, а также большого количества путевых приборов, определение оптимальной и предельно допустимой скорости по опыту ведения поезда машинистом с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Известен способ регулирования движения поездов с использованием релейно-компьютерной централизации (РКЦ). РКЦ содержит три персональных компьютера, снабженных управляющими элементами и соединенных двойной кольцевой связью, предназначенных для работы (и контроля) персональных компьютеров, конденсаторные схемы, управляющие реле и входные цепи от реле контроля состояния объектов, дополнительно снабжена тремя устройствами сопряжения, соединенными с компьютерами, входными цепями реле контроля состояния объектов и обмотками управляющих реле через контакты контрольных реле, причем первое устройство сопряжения соединено с управляющими реле через фронтовой контакт третьего контрольного реле и конденсаторную схему, второе устройство сопряжения соединено с управляющим реле через тыловой контакт третьего контрольного реле, параллельно соединенные фронтовые контакты первого и второго контрольных реле и конденсаторную схему, общее контрольное реле, выполнено с возможностью проверки соответствия между попыткой возбуждения набора управляющих реле и их фактическим возбуждением, включено аналогично управляющим реле, а его фронтовой контакт включен в цепь объектов последовательно с контактами управляющих реле. Таким образом, способ реализации регулирования движения на железнодорожном транспорте построен на схеме с троированной ЭВМ, на вход которой поступает информация о контролируемых объектах, а управление осуществляется с использованием мажоритарной логики (три из трех или два из трех), что способствует повышению безопасности движения и надежности действия системы [Патент 2265541 (РФ). Релейно-компьютерная централизация / Полевой Ю.И., Полевая Л.В., Яковлев В.Н., Тарасов Е.М., Смышляев В.А., Гуменников В.Б., Кандалин Н.В., Сахарова Е.М. - Опубл. Бюл. 2005, №34, МПК b61l 23/04].
Недостатком устройства является ограниченность выполняющих функций, а именно, управляется только станционные объекты.
Данное техническое решение выбрано в качестве прототипа.
«Раскрытие изобретения»
Техническим результатом, на достижение которого направлено данное техническое решение, является расширение функциональных возможностей, повышение безопасности движения поездов, повышение надежности действия устройств автоматики и телемеханики, снижение затрат на строительство и эксплуатацию станционных, перегонных и локомотивных устройств регулирования движения поездов, повышение пропускной способности, снижение затрат электроэнергии на тягу поездов, повышение точности выполнения графика движения поездов, снижение износа подвижного состава.
Технический результат достигается за счет способа регулирования движения поездов и маневровых составов с помощью ЭВМ без опасных отказов основанный на использовании троированной ЭВМ, на вход которой поступает информация о контролируемых объектах, а управление объектами осуществляется с использованием мажоритарной логики (три из трех или два из трех). При этом в памяти ЭВМ содержится информация о путевом развитии станции, плане и профиле пути, циклически вводится информация о состоянии напольных перегонных и станционных устройствах, о параметрах поездов и местах их нахождения, команды от диспетчера, сменного помощника начальника станции, машиниста-составителя, полученная информация обрабатывается, формируются команды на управления стрелками, а также команды, передаваемые по радиоканалу на локомотивы о поддержании оптимальной скорости движения поездов в каждой точке пути (кривая скорости), фактической скорости, позиции крана машиниста и локомотивного контроллера, которые приводятся в требуемое положение электромеханическими устройствами, о точках контроля бдительности машиниста, подготовки к торможению, начала торможения, прицельного торможения.
«Краткое описание чертежей»
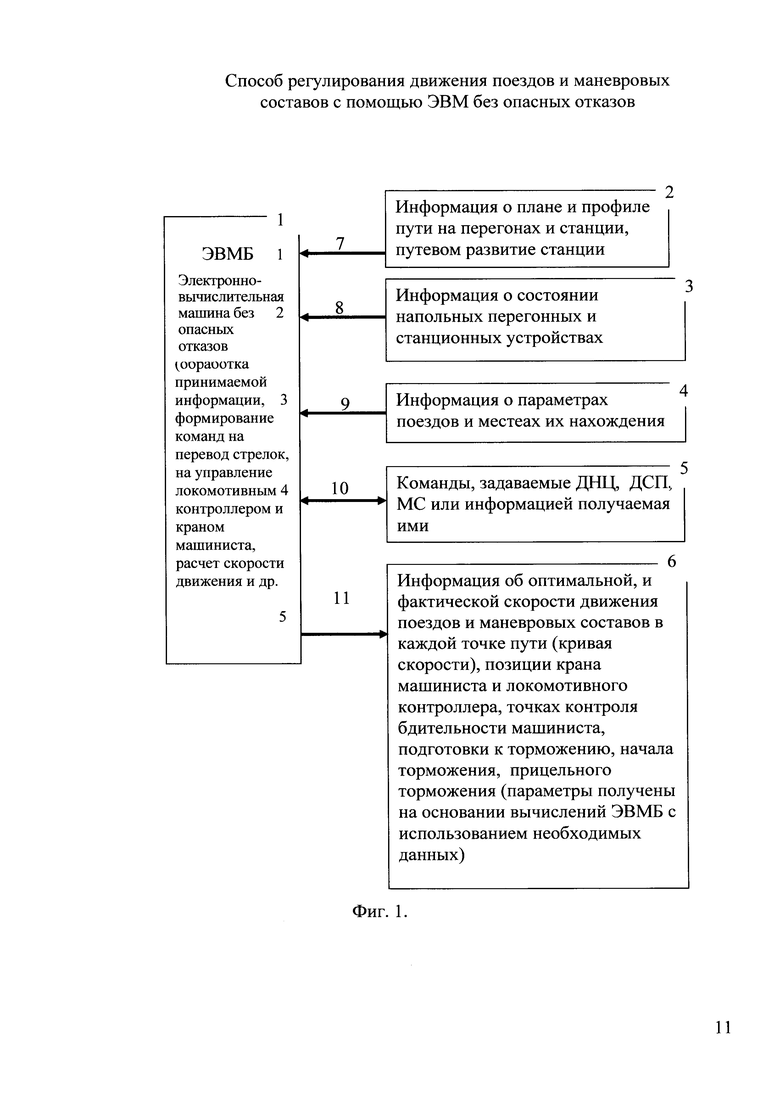
На фиг. 1 представлена структурная схема взаимодействия блоков, на фиг. 2 приведен монитор локомотивного табло. На фиг. 1 приведены обозначения позиций (блоков) и их назначение:
1 - ЭВМБ (троированная ЭВМ без опасных отказов) установлена на посту ЭЦ осуществляет прием информации необходимой для управления стрелками и локомотивами, обрабатывает ее, управляет стрелками по кабельным цепям (на фиг. 1 не представлены), и с помощью радиостанции поста ЭЦ (на фиг. 1 не представлена) передает информацию на локомотивы. ЭВМБ выполняет функции обеспечения безопасности при переводе стрелок (по аналогии с МПЦ) и управления локомотивами. Управление стрелками и локомотивами осуществляется с участием программы, составленной согласно расписанию движения поездов и информации о нештатных ситуациях по командам ДНЦ, ДСП, и ДСЗ (заместителя начальника станции) а также по командам МС (машинист-составитель) при выполнении маневровых передвижений; ЭВМБ осуществляет вычисление оптимальной расчетной скорости поездов и маневровых составов для каждой точки пути (кривая скорости) с использованием необходимых данных (параметров подвижного состава, плана и профиля пути, состояний путевых участков, команд ДНЦ, ДСП, ДСЗ), определяет позицию крана машиниста и контроллера, точки контроля бдительности, подготовки к торможению, начала торможения, прицельного торможения.
2 - блок, в памяти которого записана постоянная информация о плане и профиле пути перегонов и станций, путевом развитие станций.
3 - блок предназначен для сбора информации о состоянии путевых участков и положений стрелочных переводов.
4 - блок на локомотиве с информацией о параметрах поезда (номер, длина, вес, ограничение скорости), с устройством, фиксации координат местонахождения поездов.
5 - блок, осуществляющий формирование команд от ДНЦ, ДСП, МС (машинист-составитель), и получение ответной информации.
6 - блок, на локомотиве для хранения информации об оптимальной и фактической скорости движения поезда в каждой точке пути (кривая скорости), позиции крана машиниста и контроллера, координатах точек контроля бдительности машиниста, подготовки к торможению, начала торможения, прицельного торможения (параметры определяет ЭВМБ).
7 - шина ввода информации в ЭВМБ о плане и профиле пути прилегающих к станции перегонов и путевом развитии станции.
8 - шина ввода информации в ЭВМБ о состоянии напольных перегонных и станционных устройств.
9 - шина ввода информации в ЭВМБ о параметрах поездов и местах их нахождения.
10 - шина обмена информацией между ЭВМБ и ДНЦ, ДСП, МС. 11 - шина ввода информации на локомотив об оптимальной, и фактической скорости движения поездов в каждой точке пути (кривая скорости), позиции крана машиниста и локомотивного контроллера, точках контроля бдительности машиниста, подготовки к торможению, начала торможения, прицельного торможения (параметры получены на основании вычислений ЭВМБ с использованием необходимых данных).
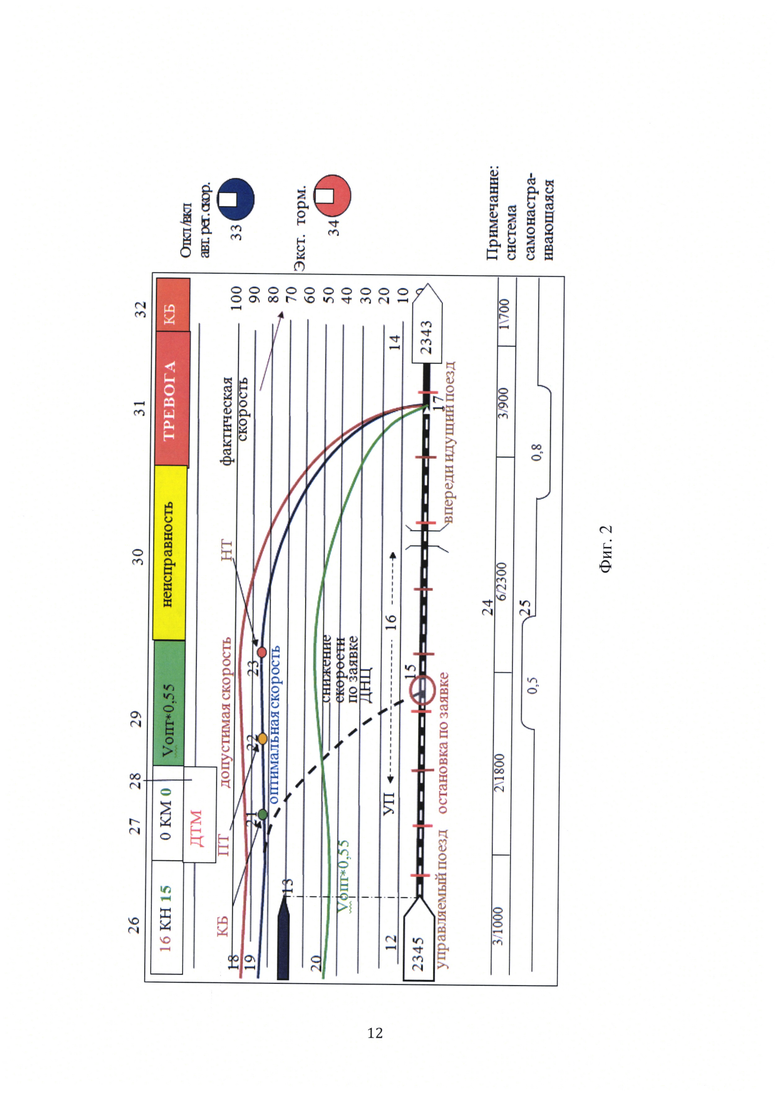
На фиг. 2 представлены обозначения, которые используются на мониторе локомотивного табло:
12 - управляемый поезд с номером 2345, изображенный на пути перегона.
13 - управляемый поезд, изображенный в координатных осях путь-скорость (километровые отметки не показаны).
14 - впереди идущий поезд с номером 2343.
15 - точка прицельного торможения при остановке поезда по требованию диспетчера.
16 - участок приближения к переезду (УП).
17 - точка прицельного торможения при сближении поездов.
18 - кривая максимально допустимой скорости.
19 - кривая оптимальной скорости.
20 - кривая оптимальной скорости с учетом складывающейся поездной ситуации на впередилежащих станциях и перегонах.
21 - точка контроля бдительности.
22 - точка подготовки к торможению.
23 - точка начала торможения.
24 - параметры профиля пути.
25 - параметры плана пути.
26 - указатель позиции контроллера (слева фактическая, справа расчетная).
27 - указатель позиции крана машиниста (ступени торможения) (слева фактическая, справа расчетная).
28 - индикатор датчика давления в тормозной магистрали.
29 - указатель снижения оптимальной скорости по фактической поездной обстановке (Vопт*0,55).
30 - указатель неисправности в локомотиве.
31 - указатель аварийной ситуации.
32 - сенсорная кнопка контроля бдительности.
33 - тумблер включения/отключения автоматической регулировки скорости.
34 - тумблер включения экстренного торможения поезда.
«Осуществление изобретения»
Электромеханические устройства управления контроллером и краном машиниста в настоящем не рассматриваются.
Для пояснения действия метода следует представить шифры сотрудников службы движения и службы тяги. Шифры сотрудников участвующих в управлении движением поездов и маневровых передвижений: ДСП - сменный помощник начальника станции, ДСЗ-заместитель начальника станции участвует в регулировании движения поездов в случае нештатной ситуации, ДНЦ - сменный руководитель движения на участке, М-С машинист, С - составитель, МС - машинист-составитель.
Основные функции сотрудников службы движения это те, которые они выполняют в отсутствии ЭВМБ, т.е. те, которые они выполняют сейчас. Дополнительные функции этих сотрудников это те, которые они будут выполнять при наличии ЭВМБ.
Основные функции сотрудников службы движения.
ДСП - выполняет операции по установке и отмене поездных и маневровых передвижений, осуществляет передачу стрелок на местное управление.
ДСЗ - нет.
ДНЦ - выполняет операции по установке и отмене поездных и маневровых маршрутов, осуществляет передачу станции или стрелок на местное/центральное управление.
С - осуществляет процесс сцепки/расцепки вагонов;
МС - нет.
Дополнительные функции сотрудников службы движения:
ДСП - нет.
ДСЗ - вводит информацию о нештатных ситуациях - опаздывающих поездах, временных перерывах движения и др.
ДНЦ - вводит информацию о нештатных ситуациях - опаздывающих поездах, временных перерывах движения и др.
МС - осуществляет дистанционное управление стрелками и маневровым локомотивом с помощью речевых сообщений через ларингофон с участием ЭВМБ.
М - нет.
С - нет.
При выполнении аварийно-восстановительных работ могут быть привлечены и другие сотрудники.
Действие способа основано на том, что основные функции по регулированию движения поездов и выполнению маневровых передвижений осуществляет ЭВМБ. Эта вычислительная машина осуществляет перевод стрелок и управление локомотивами с проверкой всех условий безопасности движения, ЭВМБ выдает оптимальные команды для локомотивов по заданию скоростного режима с учетом опоздания поездов, временного прекращения движения и других нештатных ситуаций.
ЭВМБ выполняет функции МПЦ, ДСП (частично), линейного пункта ДЦ, управления маневровыми передвижениями с участием МС, устройств автоведения, машиниста (частично).
ЭВМБ осуществляет контроль путевых участков (по программе) по принципу работы комбинированных рельсовых цепей КРЦ (сравниваются напряжения приемного конца, измеренные в разные моменты времени (относительные рельсовые цепи ОРЦ), а также напряжения приемных концов нескольких смежных рельсовых цепей измеренные одномоментно (соотносительные рельсовые цепи СРЦ)) [Полевой Ю.И. Совершенствование контроля устройств контроля состояния железнодорожных путевых участков. - Самара: 2005. - 134 с. Полевой Ю.И. Совершенствование методов контроля состояний железнодорожных путевых участков. - Самара: 2009. - 135 с. Полевой Ю.И. Адаптивные рельсовые цепи. - Самара: 2010. - 96 с. Полевой Ю.И. Исследование адаптивных рельсовые цепи. - Самара: 2010. - 142 с].
На перегонах и станциях предусматриваются рельсовые цепи без изолирующих стыков [Патент 2581277 (РФ). Способ контроля свободности рельсовой линии / Полевой Ю.И, МПК b61l 23/16], что позволяет проектировать рельсовые цепи практически без дроссель-трансформаторов.
Для сокращения потребления электроэнергии перегонными устройствами предусматривается поочередный контроль состояний коротких рельсовых цепей (450-550 м) [Полевой Ю.И. Совершенствование методов контроля состояний железнодорожных путевых участков. - Самара: 2009. - 135 с], что позволяет отказаться от строительства высоковольтной линии продольного электроснабжению. Этому способствует и отказ от напольных светофоров, в т.ч. и заградительных, от автоматической локомотивной сигнализации с использованием рельсовых линий. Обмен информацией между локомотивами и постами ЭЦ осуществляется исключительно по радиосвязи. Информация с перегонов передается на пост ЭЦ циклически аналоговыми сигналами (на посту ЭЦ они преобразуются в цифровые). Поочередно, с перегона передаются сигналы о состоянии каждой рельсовой линии (вместо одной группы объектов, как это сделано в ДЦ системы ЛУЧ [Егоренков Н.Г., Кнононов В.А. Устройства телеуправления диспетчерской централизации системы «ЛУЧ». М.Транспорт, 1988 - 304 с.]). Прием и обработка сигналов осуществляется посредством ЭВМБ. Такой контроль состояний рельсовых линий позволяет сократить жильность кабеля до 2-3 пар, и потребность в электроэнергии, что способствует отказу от использования высоковольтных линий продольного электроснабжения.
Контроль освобождения рельсовой линии может осуществляться и другими методами с использованием рельсовых цепей [Полевой Ю.И., Федоров Н.Е. Методы контроля систояния железнодорожных путевых участков. - Самара: 2006. - 134 с], или без использования рельсовых цепей с участием вагонного индуктора и других хвостовых датчиков (изотопный, штрих-код и др.).
ЭВМБ - система ЭВМ с безопасными отказами (троированная ЭВМ с контролем соответствия результатов работы компаратором с безопасными отказами и сигнатурным анализом этих ЭВМ, мажоритарной логикой (реализация результатов происходит, если три ЭВМ выдают одинаковый результат, или хотя бы две из трех, т.е. система работоспособна при двух исправных ЭВМ) позволяет повысить достоверность результатов работы систем железнодорожной автоматики и телемеханики и надежность действия этих систем. [Патент 2173278 (РФ). Релейно-компьютерная централизация / Полевой Ю.И., Яковлев В.Н., Шумаков В.М., Гуменников В.Б., Макаров П.И. - Опубл. Бюл. 2001, №25, МПК b61l 27/04. Патент 2265541 (РФ). Релейно-компьютерная централизация / Полевой Ю.И., Полевая Л.В., Яковлев В.Н., Тарасов Е.М., Смышляев В.А., Гуменников В.Б., Кандалин Н.В., Сахарова Е.М. - Опубл. Бюл. 2005, №34, МПК b61l 23/04].
Достоинством (эффективностью) способа является повышение безопасности движения поездов, надежности действия устройств автоматики и телемеханики, снижение затрат на строительство и эксплуатацию станционных, перегонных и локомотивных устройств регулирования движения поездов, повышение пропускной способности, снижение затрат электроэнергии на тягу поездов, повышение точности выполнения графика движения поездов, снижение износа подвижного состава, сокращение штата машинистов, ДСП (вместо 4-5 ДСП один ДСЗ). Кроме того, перевод стрелок осуществляется без участия человека, автоматическое управление поездными локомотивами осуществляется под контролем машиниста, автоматизированное дистанционного управления маневровыми локомотивами осуществляется машинистом-составителем).
Технический результат в части снижения затрат на строительство и эксплуатацию устройств автоматики и телемеханики достигается за счет отказа от использования на станциях и перегонах напольных и локомотивных светофоров [Патент 2572457 (РФ). Способ регулирования маневровых передвижений без маневровых светофоров / Полевой Ю.И., МПК b61l 3/20], изолирующих стыков, дроссель-трансформаторов, линии продольного электроснабжения для питания устройств автоматики и телемеханики, системы АЛС на базе рельсовых цепей. Для электропитания переездов (управления переездной сигнализацией, шлагбаумами, обеспечения освещения с использованием светодиодных светильников) предусматривается одна высоковольтная воздушная или кабельная линия до ближайшей станции и аккумуляторный резерв на переезде.
Обмен информацией между постами ЭЦ и локомотивами происходит по радиоканалу. С локомотива передается информация о параметрах поезда координатах места его нахождения (см. фиг. 1 позиция 4), на локомотив передается информация об оптимальной, и фактической скорости движения поездов в каждой точке пути (кривая скорости), позиции крана машиниста и контроллера, точках контроля бдительности машиниста, подготовки к торможению, начала торможения, прицельного торможения (параметры получены на основании вычислений ЭВМБ с использованием необходимых данных) (см. фиг. 1 позиция 4).
На локомотивном табло отражается полученная информация (см. фиг 2). Информация о координатах поездов отражается позициями 12, 13 и 14; остановка поезда по заявке ДНЦ - 15, участок приближения к переезду - 16, остановка поезда перед занятым участком пути - 17, допустимая скорость движения поезда - 18, оптимальная скорость движения поезда - 19, скорость поезда с учетом складывающейся поездной ситуации впереди по ходу движения поезда - 20 (с коэффициентом снижения скорости 0,55), точка контроля бдительности - 21, точка подготовки к торможению - 22, точка начала торможения - 23. Профиль пути - 24 (указаны радиусы кривых в км), план пути 25 (в масштабе,), позиция локомотивного контроллера (фактическая слева, расчетная справа) - 26, ступень торможения крана машиниста - 27, показания датчика давления в тормозной магистрали - 28, показания индикатора снижения скорости - 29, информация на индикаторе неисправности - 30, информация об аварийной ситуации - 31, сенсорная кнопка бдительности - 32, переключатель регулировки скорости - 33, тумблер экстренного торможения - 34. Машинист отслеживает ситуацию на табло, подтверждает бдительность, при возникновении нештатной ситуации берет управление «на себя», при необходимости осуществляет экстренное торможение. В штатной ситуации переключение позиций локомотивного контроллера и ступеней крана машиниста осуществляют электромеханические устройства. У машиниста имеется возможность отказаться от управления этими устройствами и производить самостоятельно переключения позиций крана машиниста и локомотивного контроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА ПОЛУЧЕНИЯ НА ЛОКОМОТИВЕ ИНФОРМАЦИИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА НА СТАНЦИИ | 2005 |
|
RU2295469C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ИСПОЛЬЗОВАНИЕМ РАДИОСВЯЗИ | 2018 |
|
RU2698966C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЕЗДНЫМ И МАНЕВРОВЫМ ЛОКОМОТИВАМИ | 2017 |
|
RU2657479C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
Изобретение относится к железнодорожной автоматике для регулирования маневровых передвижений. В способе в памяти ЭВМ содержится информация о путевом развитии станции, плане и профиле пути, циклически вводится информация о состоянии напольных перегонных и станционных устройств, о параметрах поездов и местах их нахождения, команды от диспетчера, сменного помощника начальника станции, машиниста-составителя, полученная информация обрабатывается, формируются команды на управление стрелками, а также команды, передаваемые по радиоканалу на локомотив, о поддержании оптимальной скорости движения поездов в каждой точке пути, т.е. кривая скорости, фактической скорости, позиции крана машиниста и локомотивного контроллера, которые приводятся электромеханическими устройствами, о точках контроля бдительности машиниста, подготовке к торможению, начале торможения, прицельном торможении. Достигается повышение безопасности движения поездов. 2 ил.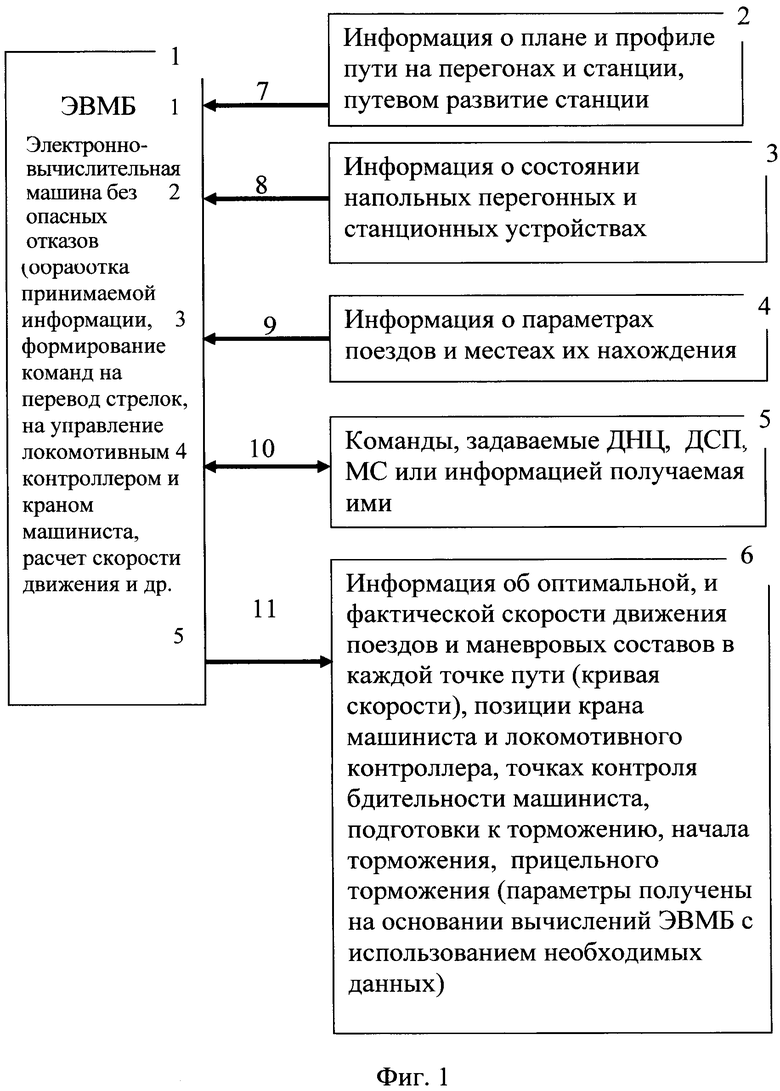
Способ регулирования движения поездов и маневровых составов с помощью ЭВМ без опасных отказов, основанный на использовании троированной ЭВМ, на вход которой поступает информация о контролируемых объектах, а управление объектами осуществляется с использованием мажоритарной логики, в частности три из трех или два из трех, отличающийся тем, что в памяти ЭВМ содержится информация о путевом развитии станции, плане и профиле пути, циклически вводится информация о состоянии напольных перегонных и станционных устройств, о параметрах поездов и местах их нахождения, команды от диспетчера, сменного помощника начальника станции, машиниста-составителя, полученная информация обрабатывается, формируются команды на управление стрелками, а также команды, передаваемые по радиоканалу на локомотив, о поддержании оптимальной скорости движения поездов в каждой точке пути, т.е. кривая скорости, фактической скорости, позиции крана машиниста и локомотивного контроллера, которые приводятся в требуемое положение электромеханическими устройствами, о точках контроля бдительности машиниста, подготовке к торможению, начале торможения, прицельном торможении.
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2010 |
|
RU2422315C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| Устройство для разлива жидкости во фляги | 1989 |
|
SU1723021A1 |

