Группа изобретений относится к технологии аэрогеофизических исследований и, в частности, касается мониторинга ближайших окрестностей в зоне движения аэрогеофизической платформы и принятия в реальном режиме времени оперативных решений по оптимизации траектории движения воздушного судна, а именно при проведении аэрогеофизических работ на сверхнизких для данного вида работ высотах.
Известен способ и устройство для аэрогеофизической разведки, содержащее летательный аппарат (преимущественно, вертолет), буксирующий горизонтально расположенную под ним электромагнитную (ЭМ) систему, включающую аппаратурный блок, излучающую антенну, приемную антенну (патент РФ №2201603, C01V 3/17). Электромагнитная система выполнена в виде аэрогеофизической платформы, включающей несущий корпус с расположенными на нем излучающей антенной, аппаратурным блоком и приемной антенной. Для контроля и обеспечения неразрущающей эксплуатационной нагрузки при маневрировании вблизи поверхности земли на платформе установлено видеоконтрольное устройство, передающее изображение платформы на летательный аппарат. Аппаратурный блок размещен в контейнере и является энергетически автономным. Бортовой измерительный комплекс содержит бортовой компьютер, связанный с приемником сигналов ГНСС, а также высотомер.
К недостаткам данного устройства следует то, что в нем не обеспечены в полной мере условия безопасности полетов и целостности системы (подвешенной, движущийся в воздушном пространстве платформы), особенно при движении и выполнении приземления и маневров в залесенной и пересеченной местности. Указанное обстоятельство обусловлено отсутствием в устройстве системы оперативного определения наличия на пути движения аэрогеофизической платформы препятствий (деревьев, холмов, ЛЭП) и расстояний до них в реальном времени.
Известны устройство и способ для аэрогеофизической разведки на базе фотограмметрических измерений превышений подвижного объекта над земной поверхностью (патент РФ №2508525, G01C 11/04, G01V 3/16, прототип). Согласно данному техническому решению аэрогеофизическая платформа с установленными на ней аппаратурным блоком, излучающей антенной и приемной антенной, снабжена инерциальным блоком, блоком управления и установленными на несущем корпусе платформы в заданное угловое положение синхронно работающими фотокамерами. Указанные фотокамеры расположены на известном расстоянии (базисе) друг от друга с возможностью получения пары перекрывающихся фотоснимков исследуемой поверхности. При проведении аэрогеофизических исследований в блоке управления осуществляется запись моментов времени срабатывания фотокамер, а также запись о соответствующем текущем угловом положении платформы. Указанная информация и фотоснимки, получаемые фотокамерами и сохраненные в их памяти, по окончании цикла работ загружаются в блок обработки для получения искомых данных.
Известное устройство обеспечивает получение информации о высотном положении подвижной аэрогеофизической платформы, а также дополнительной фотографической информации, которая может быть использована при обработке данных, полученных в ходе аэрогеофизических исследований.
Однако в данном устройстве также не организована система обнаружения препятствий, возникающих по ходу перемещения платформы. Это ставит под угрозу безопасность экипажа и целостность выносной конструкции, что может быть обеспечено увеличением высоты полета, и, как следствие, понижением разрешающей способности и надежности данных аэрогеофизической съемки.
Задачей группы изобретений является обеспечение высокой разрешающей способности и надежности аэрогеофизической съемки за счет обеспечения возможности движения воздушного судна на сверхнизких траекториях полета при гарантированном обеспечении условий безопасности выполнения геофизических исследований.
Технический результат изобретения - организация своевременного получения информации о наличии препятствий по пути перемещения аэрогеофизической платформы, определения расстояний до них с выделением критического значения, при котором необходимы соответствующие меры со стороны летного состава для корректировки траектории движения.
Заявленный технический результат достигается тем, что способ оптимизации траектории полета подвижного объекта при проведении аэрогеофизической разведки, согласно изобретению, характеризуется тем, что
- на буксируемой летательным аппаратом аэрогеофизической платформе устанавливают на известном расстоянии друг от друга две предварительно откалиброванные, синхронно работающие по командам от блока управления фотокамеры с возможностью получения ими двух перекрывающихся фотоснимков пространства по направлению движения,
- на указанной аэрогеофизической платформе устанавливают связанную с блоком управления инерциальную систему с возможностью измерения угловых положений аэрогеофизической платформы в каждый момент времени;
- осуществляют синхронную фотосъемку пространства по направлению движения с заданными временными интервалами, запись фотоснимков, запись моментов срабатывания фотокамер и запись данных (показаний) инерциальной системы об угловом положении аэрогеофизической платформы в каждый момент срабатывания фотокамер,
- получаемые данные через блок управления и сбора данных в реальном режиме времени передают в бортовой блок обработки,
- где для синхронно получаемых пар фотоснимков выполняют в реальном режиме времени фотограмметрическую обработку с получением расстояния до ближайшего мешающего объекта, значение которого визуализируется бортовым блоком визуализации.
Кроме того, согласно способу, осуществляют сравнительный анализ получаемых значений текущих расстояний до ближайших мешающих объектов, используя бортовой блок обработки, который в случае, если указанное значение меньше минимально заданного, вырабатывает сигнал тревожной сигнализации.
При этом указанная фотограмметрическая обработка полученных пар фотоснимков включает в себя: вычисление элементов взаимного ориентирования снимков в базисной системе координат; переход от базисной системе координат к внешней S1XYZ по измерениям ИНС (αпл, ωпл, κпл) и известному расстоянию между камерами В; вычисление координат точки S0 редукции (точки отсчета расстояний) во внешней системе координат; выделение зоны поисков (например, линии горизонта) на левом снимке и массива объектов (точек Ai) в пределах зоны поиска; поиск соответственных точек на правом снимке для каждого объекта с вычислением их координат XAi, YAi, ZAi в системе S1XYZ, задаваемой инерциальной навигационной системой; вычисление расстояний от точки редукции S0 до каждого объекта Ai по формуле

где Li - расстояние от точки S0 редукции до объекта Ai;
XAi, YAi, ZAi - координаты точки Ai - объекта из массива в зоне поиска;
XS0, YS0, ZS0 - координаты точки редукции (отсчета) S0.
Заявленный технический результат достигается также тем, что в устройстве для аэрогеофизической разведки, содержащем буксируемую летательным аппаратом аэрогеофизическую платформу, включающую несущий корпус, с установленными на нем излучающей антенной, приемной антенной, инерциальным блоком, видеорегистратором и двумя синхронно работающими фотокамерами, расположенными на известном расстоянии (базисе) друг от друга с возможностью получения пары перекрывающихся фотоснимков, согласно изобретению указанные фотокамеры установлены в передней части аэрогеофизической платформы на равных расстояниях от ее продольной оси и ориентированы вдоль направления движения, затворы каждой из указанных фотокамер связаны с управляющим выходом блока управления и сбора данных, первый и второй входы которого связаны с соответствующими выходами указанных фотокамер, третий вход блока сбора данных и управления связан с выходом инерциального блока, а его информационный выход связан с бортовым блоком обработки данных, расположенном на борту подвижного объекта, буксирующего аэрогеофизическую платформу, выходы бортового блока обработки связаны с блоком визуализации и устройством звуковой сигнализации.
При этом устройство дополнительно включает связанный с четвертым входом блока управления и сбора данных видеорегистратор, установленный в передней части аэрогеофизической платформы с возможностью обзора в направлении движения.
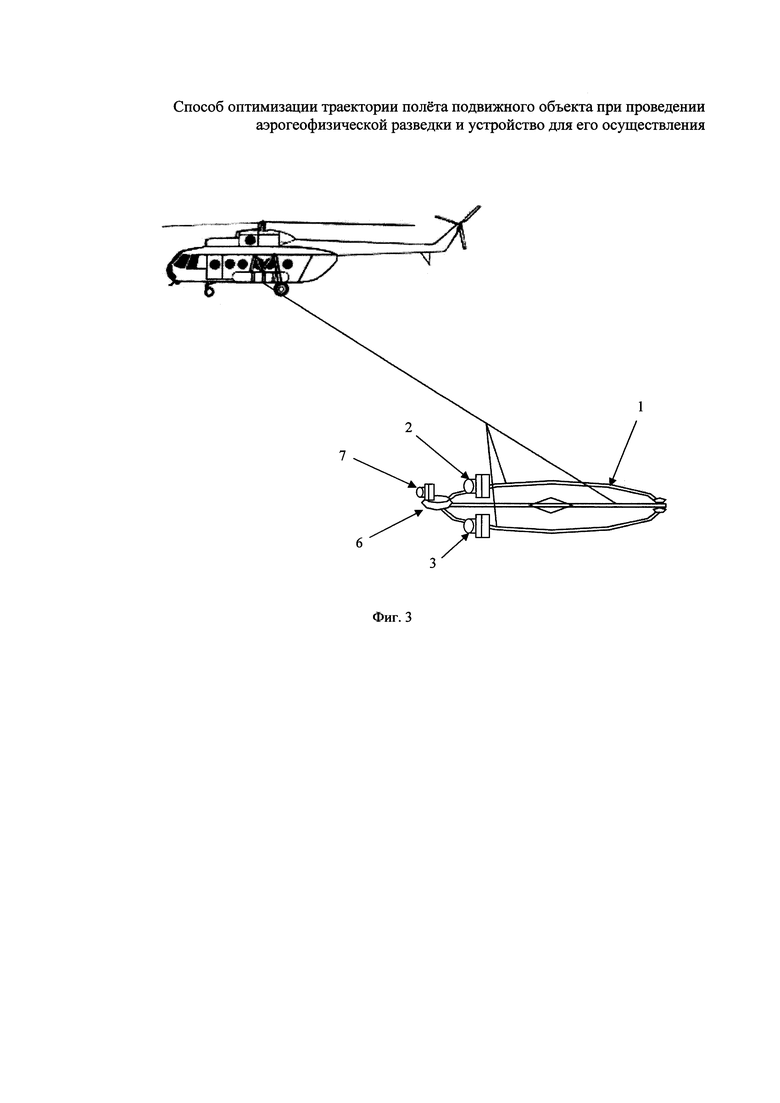
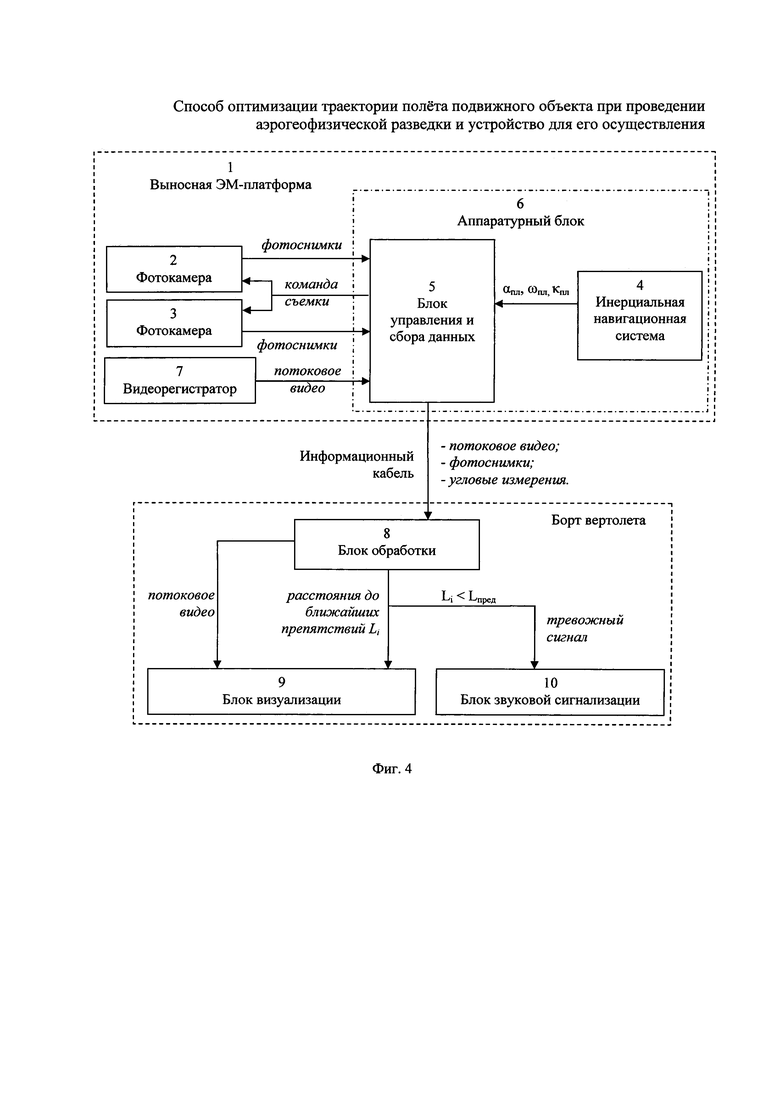
Фиг. 1 и фиг. 2 иллюстрируют полученную путем моделирования степень влияния на результаты измерений высоты расположения аэрогеофизической платформы над земной поверхностью, На фиг. 3 показан общий вид устройства согласно изобретению, на фиг. 4 приведена блок-схема устройства, на фиг. 5 показана блок-схема последовательности операций при обработке пар фотоснимков.
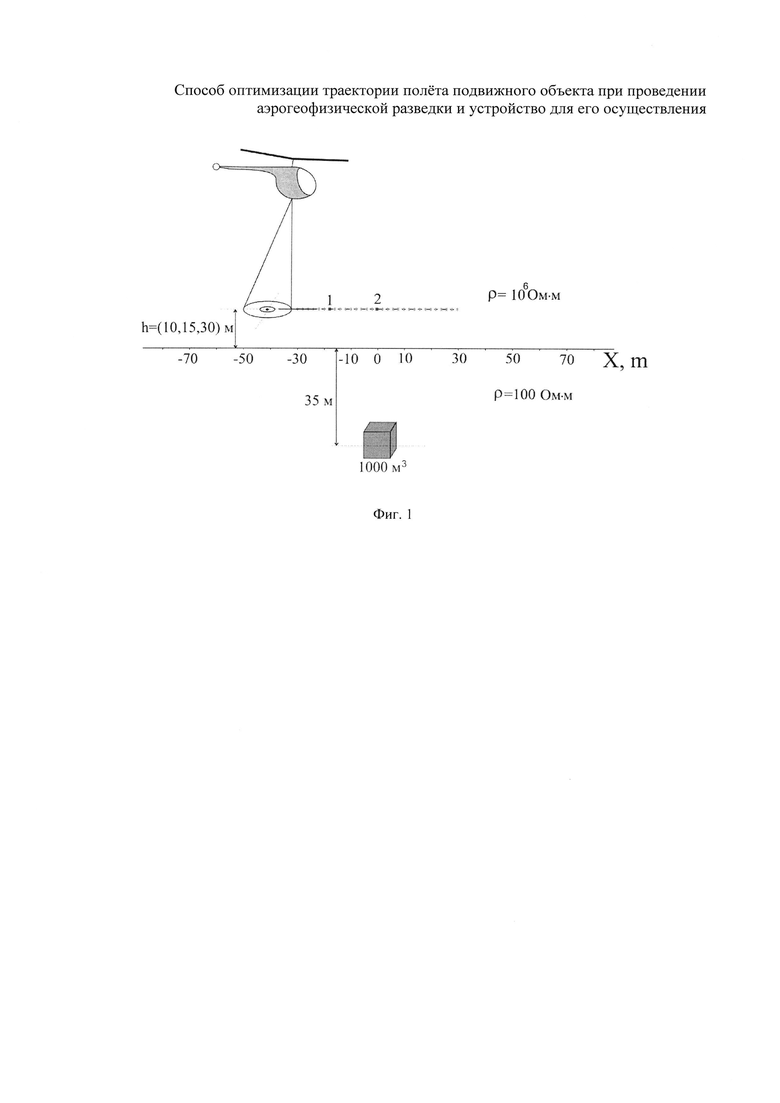
Известно, что разрешающая способность ЭМ-системы повышается при снижении высоты полета над поисковым объектом
Под разрешающей способностью в данном случае понимается величина, характеризующая способность ЭМ-системы выделить положительную аномалию измеряемого сигнала от поискового объекта объемом 1000 м3 (фиг. 1). Рассмотрим модель: точка №1 (система удалена от объекта в плане - вдоль оси X - на 15 м) и точка №2 (нахождение системы над объектом). Для упрощения, примем радиус проекции аэрогеофизической платформы на земную поверхность величиной 7.1 м, тогда поисковый объект при нахождении системы в точке №2 впишется в окружность данной проекции.
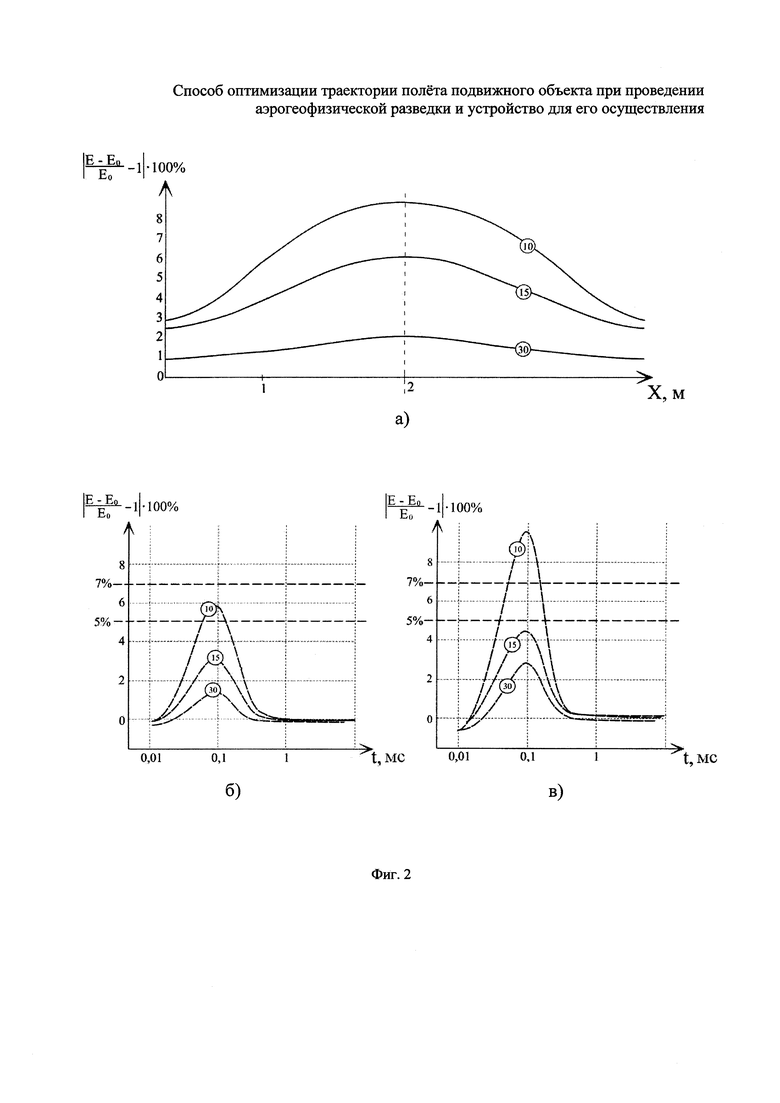
Измеряемый электромагнитный сигнал соответствует скорости изменения магнитного поля вторичных вихревых токов, индуцированных в проводящем объекте при импульсном возбуждении первичного электромагнитного поля в главном индукторе аэрогеофизической системы. Сигнал от поискового объекта, как видно из фиг. 2 (а), зависит от положения ЭМ-системы в пространстве относительно проекции поискового объекта. Над эпицентром поискового объекта измеряемый аномальный сигнал имеет максимальное значение, а при удалении от эпицентра объекта, амплитуда аномального сигнала уменьшается; увеличение высоты полета также ведет к уменьшению амплитуды аномального сигнала. На фиг. 2 (а) показано, что при увеличении высоты полета ЭМ-системы над локальным поисковым объектом, залегающим на глубине 35 м от поверхности земли, амплитуда аномалии уменьшается.
Поскольку измерение аномального сигнала, характеризующего присутствие и параметры поискового объекта, выполняется на фоне внешних ЭМ-помех, амплитуда которых может меняться в достаточно широких пределах, то наступает момент, когда аномальный сигнал от объекта сливается с фоном внешних шумов и перестает быть различимым. Это и есть так называемый высотный предел разрешения. На фиг. 2 (б, в), изображены относительные пространственно-временные аномалии для точки №1 и точки №2 траектории полета, зарегистрированные в диапазоне времен от 0.01 до 10 мс. Максимальное значение аномалии от поискового объекта, как и ожидалось, наблюдается над эпицентром объекта (точка №2) на времени около 1 мс. При уровне помехи в 5% при пролетах на высоте 15 и 30 м детектировать поисковый объект будет затруднительно. Для сверхнизкой высоты полета в 10 м для уровня помех в 5% объект будет обнаружен. Однако при увеличении уровня помех до 7% в точке №1 профиля его влияние уже будет незаметно, что характеризует уменьшение пространственной разрешающей способности. На высотах полета больше 15 м объект не будет обнаружен. Таким образом, проведение съемки на оптимальной высоте полета увеличит разрешающую способность ЭМ-системы и позволит увеличить достоверность выделения поисковых объектов.
Устройство, согласно изобретению, содержит связанную с летательным аппаратом аэрогеофизическую платформу 1, включающую несущий корпус, с установленными на нем излучающей антенной и приемной антенной (не показаны), На указанной аэрогеофизической платформе 1 в ее передней части жестко установлены ориентированные вдоль направления движения фотокамера 2 и фотокамера 3, а также инерциальная система 4 и блок 5 управления и сбора данных, расположенные в аппаратурном блоке 6 (фиг. 3, фиг. 4). Указанные фотокамеры 2 и 3 установлены на аэрогеофизической платформе 1 на известном расстоянии от ее оконечной передней части и на равных расстояниях от ее продольной оси. Первый вход указанного блока 5 управления и сбора данных связан с выходом инерциального блока 4, второй и третий входы указанного блока 5 управления и сбора данных связаны с выходами соответствующих фотокамер 2, 3. Управляющий выход блока 5 управления и сбора данных связан с затворами каждой из указанных фотокамер 2 и 3, а его информационный выход через информационный кабель (например, Ethernet кабель), связан с блоком 8 обработки, расположенном на борту летательного аппарата, буксирующего аэрогеофизическую платформу 1. Четвертый вход блока 5 управления и сбора данных связан с видеорегистратором 7. Выход бортового блока 8 обработки связан с блоком 9 визуализации и устройством 10 звуковой сигнализации. Указанный видеорегистратор 7 также, как и фотокамеры 2, 3, установлен в передней части аэрогеофизической платформы 1 с возможностью обзора в направлении движения.
Инерциальная система 4 включает трехосевой гироскоп (не показан) измеряющий эйлеровы элементы (углы) ориентации платформы 1 в пространстве и трехосевой акселерометр (не показан), измеряющий моментальные ускорения по осям x, y, z, необходимые для ввода корректирующих поправок в измерения гироскопа за уход оси.
Блок 5 управления и сбора данных представляет собой миниатюрный компьютер или электронный планшет, снабженный соответствующим программным обеспечением, в заданном режиме подает команды синхронной фотосъемки на фотокамеры 2, 3, выполняет прием, форматирование и дальнейшую передачу по информационному кабелю данных на борт летательного аппарата.
Данные с блока 5 сбора данных и управления в реальном времени в ходе аэрогеофизических исследований поступают в бортовой блок 8 обработки (персональный компьютер, ноутбук или электронный планшет), выполняющий обработку всех данных посредством специального программного обеспечения. При этом осуществляется визуальный контроль текущего линейного положения аэрогеофизической платформы 1 и звуковая сигнализация в случае ее приближения на минимально возможное расстояние L к объекту, препятствующему движению.
Работы в соответствии с изобретением осуществляются в следующей последовательности операций.
На аэрогеофизической платформе 1 на известном расстоянии, базисе В, друг от друга устанавливают предварительно откалиброванные фотокамеры 2 и 3 с возможностью получения ими двух перекрывающихся фотоснимков исследуемой поверхности. На указанной аэрогеофизической платформе 1 устанавливают также инерциальную систему 4 с возможностью измерения угловых положений аэрогеофизической платформы 1 и соответственно указанных фотокамер 2 и 3 в каждый момент времени, и блок 5 управления и сбора информации.
В процессе перемещения аэрогеофизической платформы 1 в пространстве по командам с блока управления 5 осуществляется синхронная фотосъемка пространства по направлению движения. Срабатывания затворов фотокамер 2 и 3 осуществляется с заданными временными интервалами. С фотокамер 2 и 3 фотоснимки передаются на блок 5 управления и сбора данных непосредственно после их получения.
Кроме того, блок 5 осуществляет передачу потокового видео, поступающего с видеорегистратора 7, и запись моментов фотографирования (подачи команд на фотокамеры 2, 3). Одновременно в него поступают и записываются данные инерциальной системы 4 о текущем угловом положении аэрогеофизической платформы 1, необходимые для дальнейшей фотограмметрической обработки каждой из пар получаемых фотоснимков.
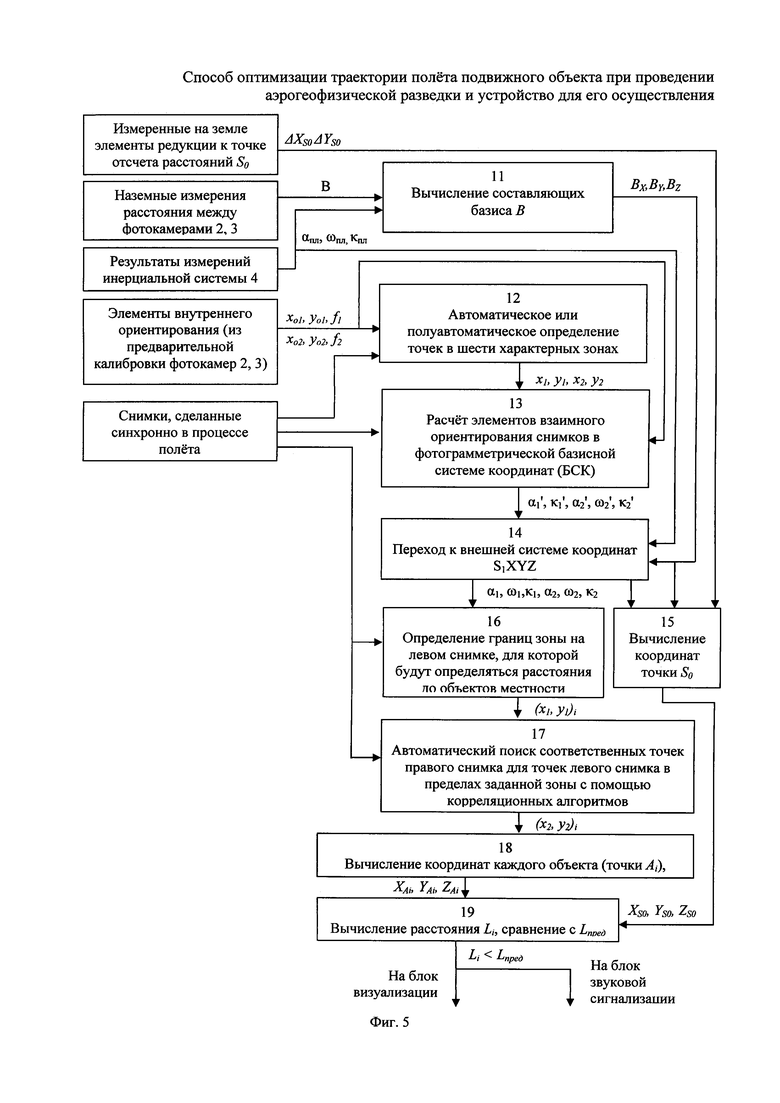
Указанная обработка осуществляется в блоке 8 обработки по известным из фотограмметрии зависимостям и включает (фиг. 5):
1. Ввод в блок 8 обработки данных из блока 5 управления (измерений инерциальной системы 4 и снимков с фотокамер 2, 3).
2. Вычисление составляющих BX, BY, BZ базиса В по углам крена (αпл), тангажа (ωпл) и курса (κпл) платформы во вспомогательной системе координат S1XYZ, задаваемой инерциальной навигационной системой 4 (поз. 11, фиг. 5).
3. По известным фокусным расстояниям f1 и f2, фотокамер 2, 3 и известным координатам главных точек o1 и o2 снимков (xo1, yo1 и хo2, yo2) из предварительной калибровки для каждой из фотокамер 2, 3 и плоским координатам соответственных точек снимков 8, 9 (x1, y1, x2, y2) в шести характерных зонах автоматизировано (поз. 12, фиг. 5) осуществляют расчет элементов взаимного ориентирования (углы α1′, κ1′, α2′, ω2′, κ2′) снимков в базисной фотограмметрической системе координат S1X′Y′Z′ (поз. 13, фиг. 5). Нахождение элементов взаимного ориентирования может выполняться единожды или периодически - в зависимости от величины упругих деформаций аэрогеофизической платформы. Важно отметить, что здесь и далее под обозначением y1 и y2 принимаются координаты точек снимков, соответствующие z1 и z2, принятым в теории наземной стереосъемки.
4. С учетом данных инерциальной системы 4 (данных об угловом положении фотокамер 2, 3 в каждый момент времени αпл, ωпл, κпл) осуществляют переход (поз. 14, фиг. 5) к вспомогательной внешней системе координат S1XYZ (вычисление элементов внешнего ориентирования снимков, участвующих в дальнейших вычислениях) с началом в точке фотографирования левого снимка S1 и угловой ориентацией в пространстве заданной инерциальной системой 4.
5. Вычисление координаты точки редукции S0 (точки отсчета расстояний) во вспомогательной внешней системе координат S1XYZ (поз. 15, фиг. 5).
6. Вычисление границ зоны анализа расстояний на левом снимке (с фотокамеры 3), включающей в себя линию действительного горизонта ii и ее окрестности в пределах заданного количества пикселей (поз. 16, фиг. 5).
7. Для точек Ai (x1, y1)i выбранной зоны на левом снимке - автоматический поиск соответствующих точек на правом (x2, y2)i (с фотокамеры 2), например, посредством алгоритма, основанного на определении максимумов площадной корреляции (поз. 17, фиг. 5).
8. Вычисление координат XAi, YAi, ZAi точек Ai в системе S1XYZ по координатам точек на снимках (поз. 18, фиг. 5)
9. Получение векторов расстояний Li от точки S0 до объектов местности в точках Ai (поз. 19, фиг. 5) по формуле

где Li - расстояние от точки S0 редукции до объекта Ai;
XAi, YAi, ZAi - координаты точки Ai - объекта из массива в зоне поиска;
XS0, YS0, ZS0 - координаты точки редукции (отсчета) S0.
10. Анализ полученных данных и вывод результатов на блок визуализации 9. В случае, если расстояние до ближайшей точки местности анализируемой зоны меньше заданного предела Lпред, должна выполняться подача тревожного сигнала на блок звуковой сигнализации 10.
Описанные выше операции осуществляются для каждой пары фотоснимков, получаемых в процессе перемещения аэрогеофизической платформы 1 над исследуемой поверхностью с получением, таким образом, информации о расстоянии (дальности в горизонтальной плоскости) подвижной аэрогеофизической платформы 1 до объектов по ходу ее перемещения в пространстве на протяжении всего маршрута.
Предельное расстояние до объектов Lпред, при котором подается тревожный сигнал на звуковое устройство может быть получен по формуле
Lпред=V(tр+tуд+tор),
где V - скорость полета; tр - время реакции пилота на тревожный сигнал; tуд - максимальная продолжительность упреждающего маневра для предотвращения столкновения (набор высоты); top - продолжительность цикла определения расстояний L от подачи сигнала на фотокамеры 2, 3 до завершения обработки фотоснимков на блоке 8, визуализации результата и подачи звукового сигнала.
Если принять tр=3 с, top=3 с, top=2 с, V=30 м/с, то величина Lпред составит 240 м.
Кроме того, блок обработки 8 передает на блок визуализации 9 потоковое видео с видео регистратора 7, используемое для визуального контроля полета платформы 1. Поверх видеоряда может отображаться авиагоризонт И платформы 1, получаемый по измерениям инерциального блока 4.
В качестве варианта решения задачи повышения безопасности полетов и сохранности аэрогеофизической платформы 1 для измерения расстояний L до приближающихся препятствий могут быть использованы другие средства измерений, например, сканирующий лазерный дальномер или радиодальномер. Обработка данных в таком случае будет заключаться в фильтрации измерений и анализе точек в зоне линии горизонта и ее окрестностей.
Таким образом, заявленная группа изобретений, обеспечивает проведение аэрогеофизических работ с определением текущего расстояния от аэрогеофизической платформы до объектов по ходу ее движения, с предупреждением пилота о приближении к препятствиям и возможностью своевременного принятия мер для совершения упреждающего маневра, в том числе при взлете и посадке летательного аппарата. Вследствие этого исключается возможность аварийной полетной ситуации, что позволяет оптимизировать траекторию полета и обеспечить проведение аэрогеофизических исследований с минимально возможных высот, что в свою очередь обеспечивает высокую разрешающую способность аэрогеофизической съемки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОГРАММЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЙ ПОДВИЖНОГО ОБЪЕКТА НАД ЗЕМНОЙ ПОВЕРХНОСТЬЮ И УСТРОЙСТВО ДЛЯ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2012 |
|
RU2508525C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ФОТОСЪЁМКЕ С БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2726902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| Способ определения высоты платформы из привязного беспилотного летательного аппарата | 2024 |
|
RU2831621C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПРОДУКТОПРОВОДОВ | 2005 |
|
RU2281534C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
Изобретение относится к технологии аэрогеофизических исследований и может быть использовано при мониторинге ближайших окрестностей в зоне движения аэрогеофизической платформы. В передней части аэрогеофизической платформы установлены две синхронно работающие фотокамеры, которые ориентированы вдоль направления движения. Согласно способу осуществляют синхронную фотосъемку и запись снимков пространства по направлению движения. Дополнительно записывают моменты срабатывания фотокамер и данные инерциальной системы. Получаемые данные передают бортовой блок обработки, где в реальном режиме времени для синхронно получаемых пар фотоснимков выполняют фотограмметрическую обработку с получением расстояния до ближайшего мешающего объекта, значение которого визуализируется. Технический результат - обеспечение своевременного получения информации о наличии препятствий по пути перемещения аэрогеофизической платформы, определение расстояния до него с выделением критического значения. 2 н. и 3 з.п. ф-лы, 5 ил.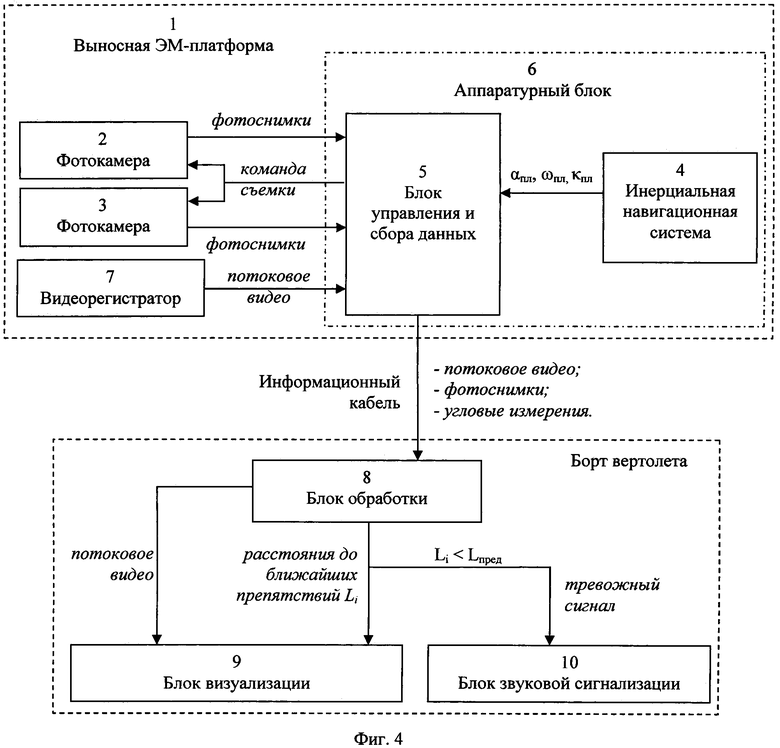
1. Способ оптимизации траектории полета подвижного объекта при проведении аэрогеофизической разведки, характеризующийся тем, что
- на буксируемой летательным аппаратом аэрогеофизической платформе устанавливают на известном расстоянии друг от друга две предварительно откалиброванные, синхронно работающие по командам от блока управления фотокамеры с возможностью получения ими двух перекрывающихся фотоснимков пространства по направлению движения,
- на указанном подвижном объекте устанавливают связанную с блоком управления инерциальную систему с возможностью измерения угловых положений аэрогеофизической платформы в каждый момент времени;
- осуществляют синхронную фотосъемку пространства по направлению движения с заданными временными интервалами, запись фотоснимков, запись моментов срабатывания фотокамер и запись данных (показаний) инерциальной системы об угловом положении аэрогеофизической платформы в каждый момент срабатывания фотокамер,
- получаемые данные через блок управления и сбора данных в реальном режиме времени передают в бортовой блок обработки,
- в реальном режиме времени выполняют фотограмметрическую обработку синхронно получаемых пар фотоснимков с определением расстояния до ближайшего объекта местности, значение которого визуализируется бортовым блоком визуализации.
2. Способ по п. 1, отличающийся тем, что осуществляют сравнительный анализ получаемых значений текущих расстояний до ближайших мешающих объектов, используя бортовой блок обработки, который в случае, если указанное значение меньше минимально заданного, вырабатывает сигнал тревожной сигнализации.
3. Способ по п. 1, характеризующийся тем, что указанная фотограмметрическая обработка полученных пар фотоснимков включает в себя: вычисление элементов взаимного ориентирования снимков в базисной системе координат; переход от базисной системе координат к внешней S1XYZ по измерениям ИНС (αпл, ωпл, κпл) и известному расстоянию между камерами В; вычисление координат точки S0 редукции (точки отсчета расстояний) во внешней системе координат; выделение зоны поисков (например, линии горизонта) на левом снимке и массива объектов (точек Ai) в пределах зоны поиска; поиск соответственных точек на правом снимке для каждого объекта с вычислением их координат XAi, YAi, ZAi в системе S1XYZ, задаваемой инерциальной навигационной системой; вычисление расстояний от точки редукции S0 до каждого объекта Ai по формуле
 ,
,
где Li - расстояние от точки S0 редукции до объекта Ai;
XAi, YAi, ZAi - координаты точки Ai - объекта из массива в зоне поиска;
XS0, YS0, ZS0 - координаты точки редукции (отсчета) S0.
4. Устройство для аэрогеофизической разведки, содержащее буксируемую летательным аппаратом аэрогеофизическую платформу, включающую несущий корпус, с установленными на нем излучающей антенной, приемной антенной, инерциальным блоком, видеорегистратором и двумя синхронно работающими фотокамерами, расположенными на известном расстоянии (базисе) друг от друга с возможностью получения пары перекрывающихся фотоснимков, отличающееся тем, что указанные фотокамеры установлены в передней части аэрогеофизической платформы на равных расстояниях от ее продольной оси и ориентированы вдоль направления движения, затворы каждой из указанных фотокамер связаны с управляющим выходом блока управления и сбора данных, первый и второй входы которого связаны с соответствующими выходами указанных фотокамер, третий вход блока сбора данных и управления связан с выходом инерциального блока, а его информационный выход связан с бортовым блоком обработки данных, расположенным на борту подвижного объекта, буксирующего аэрогеофизическую платформу, выходы бортового блока обработки связаны с блоком визуализации и устройством звуковой сигнализации.
5. Устройство по п. 4, отличающееся тем, что оно дополнительно включает связанный с четвертым входом бока управления и сбора данных видеорегистратор, установленный в передней части аэрогеофизической платформы с возможностью обзора в направлении движения.
| Фотограмметрический способ и устройство для определения истинной высоты выносной вертолётной платформы аэрогеофизического комплекса "Импульс-Аэро", В | |||
| И | |||
| Кузин, С | |||
| О | |||
| Шевчук, В | |||
| Н | |||
| Никитин, Изв | |||
| Вузов, Геодезия и аэрофотосъёмка, 2013, N 4/С, с.86-92 | |||
| Навигационно-геодезическое обеспечение аэрогеофизических исследований, Г | |||
| М | |||
| Тригубович, С.О. |

