Изобретение относится к области геоинформационных систем и может быть использовано в качестве телекоммуникационных каналов для передачи/приема информации радио или оптической связи в труднодоступных районах.
Известно техническое решение (см. СЧЕТЧИК ДЛИНЫ КАБЕЛЬ-ТРОСА БУКСИРЕМОГО ПОДВОДНОГО АППАРАТА Д.А. Ченский, Григорьев К.А. Инженерные приложения на базе технологии NATIONAL INSTRUMENTS - 2014, стр. 408), в котором для измерения буксируемого аппарата необходимо знать координаты научно-исследовательского судна (НИС), глубину погружения и удаленность от судна буксируемого аппарата. Координаты НИС определяются системой GPS/ГЛОНАСС с внесением дифференциальных поправок, что позволяет достичь, точности определение координат не менее 15 см. Электронный счетчик кабель троса, выполненный на cRIO, позволяет определять количество вымотанного троса и согласно этим данным рассчитать местоположение буксируемого подводного аппарата. Счетчик состоит из механической части (колесо, вращающееся движущимся кабель-тросом), 4 датчиков Холла и нескольких неодимовых магнитов. Возможности измерения составляют не менее четверти диаметра колеса, что позволяет достичь погрешности измерение не хуже чем 1% на 1000 метров. Показания с датчиков Холла по кабелю приходят на модуль цифрового ввода/вывода Crio и обрабатываются программой написанной на LabVIEW 2013.
К недостаткам этого технического решения можно отнести температурную нестабильность датчиков Холла и колеблющую точность измерений из-за постоянно меняющегося магнитного поля неодимовых магнитов.
Известна работа (прототип), посвященная фотограмметрическому способу и устройству для определения истинной высоты выносной вертолетной платформы аэрогеофизического комплекса «Импульс-Аэро» (см. В.И. Кузин, С.О. Шевчук, В.Н. Никитин // Изв. вузов. Геодезия и аэрофотосъемка. - 2013. - №4/С. - С. 86-92.). В данной статье рассмотрена возможность получения истинной высоты фотограмметрическим методом посредством устройства, состоящего из пары неметрических фотокамер. Принцип получения превышений платформы над земной поверхностью согласно данному способу заключается в использовании свойств стереопар снимков, размещенных на жесткой основе с углами наклона и базисом. Камеры могут закрепляться на электромагнитной платформе жесткими креплениями таким образом, что расстояние между ними будет постоянной величиной на протяжении полета. Углы наклона системы могут быть достаточно точно получены посредством инерциальной навигационной системы. Конструктивно, в состав системы, кроме камер, входят еще вертолет типа МИ-8, комплекс бортовой измерительной аппаратуры, магнитометр и выносную платформу - источник электромагнитных излучений. Последние два элемента системы выносятся за борт вертолета на трос - кабеле длиной 50-60 м. Способ основан на геометрической обратимости точек перекрывающейся пары фотоснимков. Истинная высота к полету (превышения движущийся геофизической платформы) над исследуемой поверхностью (точкой А - проекцией центра платформы на исследуемую поверхность), согласно данному способу, определяется для точки 50, находящейся между камерами в центре базиса точкой В. В способе благодаря выполнению синхронного экспонирования неметрическими фотокамерами (заранее откалиброванными) обеспечиваются все необходимые параметры для определения истинной высоты - известные углы наклона и базис.
Недостатком этого технического решения можно считать нестабильность в определении высоты платформы из-за неэффективной работы фотокамер, связанной с неблагоприятными погодными условиями.
Техническим результатом данного способа является повышение стабильности в определении высоты платформы из привязного беспилотного летательного аппарата.
Технический результат достигается тем, что в способе определения высоты платформы из привязного беспилотного летательного аппарата, на нижней точке силиконовой резины, выполненной в виде оболочки по всей длине кабель - тороса привязного беспилотного летательного аппарата, осуществляющего электрическое питание летательного аппарата, возбуждают сверхвысокочастотные (СВЧ) электромагнитные колебания с возможностью их передачи и приема, колебания от точки возбуждения по наружной поверхности силиконовой оболочке направляют в сторону нижней части рамы летательного аппарата, представляющей электрический контакт конца кабель-троса с входом преобразователя электрической энергии, расположенного на раме летательного аппарата, принимают отраженные от конца кабель-троса колебания и по преобразованию скорости распространения электромагнитных колебаний в свободном пространстве с и времени t распространения колебаний от нижней точки до верхней точки кабель-троса и от верхней точки до нижней точек кабель-троса, вычисляют через длину кабель-троса высоту платформы из привязного беспилотного летательного аппарата.
Сущность заявляемого изобретения, характеризуемого совокупностью указанных выше признаков, состоит в том, что измерение времени распространения электромагнитных колебаний по силиконовой оболочке кабель-троса, дает возможность через него определить высоту платформы из привязного беспилотного летательного аппарата.
Наличие в заявляемом способе совокупности перечисленных существующих признаков, позволяет решить задачу определения высоты платформы на базе привязного беспилотного летательного аппарата посредством измерения времени распространения электромагнитных колебаний по силиконовой оболочке кабель-троса с желаемым техническим результатом, т.е. повышением стабильности в определении высоты платформы из привязного беспилотного летательного аппарата.
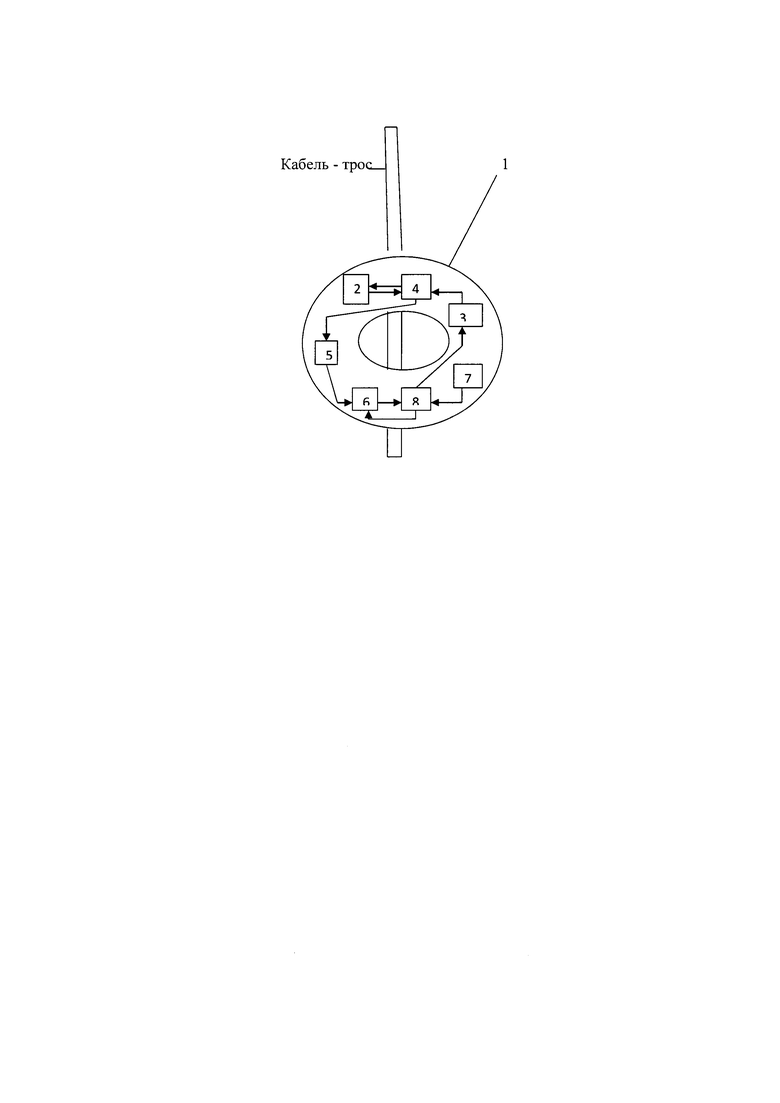
На чертеже схематически представлено устройство, реализующее предложенный способ.
Устройство, реализующее предлагаемый способ, содержит съемное кольцо 1, расположенные на нем штырь 2, СВЧ-генератор 3, циркулятор 4, амплитудный детектор 5, измеритель времени 6, блок питания 7 и коммутатор 8.
Способ работает следующим образом. Перед запуском привязного беспилотного летательного аппарата его кабель-трос пропускают через съемное кольцо 1, установленное жестко с помощью кронштейна на земле или на поддоне. После этого запускают летательный аппарат вверх и при достижении определенной высоты переводят его в режим зависания. При этом кольцо не должно создавать препятствия размотке/намотке кабель-троса при подъеме и спуске, а также маневрировании летательного аппарата по воздуху.
Согласно предлагаемому способу для определения высоты зависанного в воздухе аппарата через длину кабель-троса, на наружной поверхности силиконовой оболочке (место стыка кабель-троса с силиконовой оболочкой) возбуждают СВЧ электромагнитные колебания. Далее возбужденные колебания посредством оболочки, используемой как диэлектрический волновод, направляют в сторону нижней поверхности рамы зависанного летательного аппарата. Как правило, верхний конец кабель-троса (нижний конец кабель-троса подключен к выходу блока электрической энергии, установленного на земле) с помощью разъема соединяют с входом преобразователя электрической энергии, размешенного на раме летательного аппарата. Следовательно, в рассматриваемом случае длина кабель-троса будет определяться от точки возбуждения электромагнитных колебаний на наружной поверхности силиконовой оболочки до разъема, соединяющего верхний конец кабель-троса с входом преобразователя электрической энергии. Распространение возбужденных колебаний по наружной поверхности силиконовой оболочки по ее длине вверх, в итоге приведет их отражение от разъема, как неоднородность на конце длинной линий. Отраженные от разъема колебания по той же оболочке будут распространяться в обратную сторону - к месту возбуждения колебаний наружной поверхности оболочки. Согласно предлагаемому техническому решению суть определения длины кабель-троса заключается в измерении времени распространения по силиконовой оболочке от точки возбуждения электромагнитных колебаний до разъема и обратно до точки возбуждения с последующим вычислением длины кабель-троса. Если обозначить, время распространения от точки возбуждения электромагнитных колебаний до разъема и обротано (время запаздывания) t, то при величине длины кабель-троса L, можно записать t=2 L/c, где с - скорость распространения электромагнитных колебаний в свободном пространстве. Отсюда L=tc/2. Следовательно, измерение времени t дает возможность через длину кабель-троса определить высоту платформы из привязного беспилотного летательного аппарата.
Устройство, реализующее предлагаемый способ работает следующим образом. Предварительно блок питания 7 через первое плечо коммутатора 8 подключают к СВЧ-генератору 3 и измерителю времени 6 (здесь для питания генератора и измерителя времени допускается одно и то же напряжение). Выход СВЧ-генератора соединяют с первым плечом циркулятора 4, а второе плечо циркулятора - со штырем 2. Третье плечо циркулятора подключают к входу амплитудного детектора 5, а его выход ко второму плечу коммутатора. При этом все элементы СВЧ-техники могут быть изготовлены на основе полосковой и микрополосковой технологий и размешаются на съемном кольце 1. Согласно работе данного устройства выходные колебания СВЧ-генератор поступают на первое плечо циркулятора. Далее колебания со второго плеча циркулятора передаются на штырь, который возбуждает на наружной поверхности силиконовой оболочки электромагнитные колебания. Колебания распространяются по оболочке и отражаются от разъема. Отраженный электромагнитный сигнал распространяется в обратную сторону и улавливается штырем. Благодаря принципу работы циркулятора, отраженный сигнал снимается третьим плечом циркулятора и далее передается на вход амплитудного детектора, выходной сигнал которого, поступает на второе плечо коммутатора. Выходным напряжением блока питания через коммутатор запускаются одновременно СВЧ-генератор и измеритель времени. После появления выходного сигнала детектора через коммутатор отключаются СВЧ-генератор и измеритель времени с охранением показаний о времени распространении колебаний от штыря до разъема и обратно от разъема до штыря. Следовательно, измеренное время, далее используется для вычисления высоты платформы из привязного беспилотного летательного аппарата. При этом для определения высоты платформы от поверхности земли, вычисленной длине кабель-троса необходимо прибавить высоту вертикальной части кронштейна, удерживающего съемное кольцо, обхватывающее кабель-трос привязного беспилотного летательного аппарата.
Таким образом, в предлагаемом техническом решении измерением времени распространения электромагнитных колебаний по силиконовой оболочке кабель-троса, можно обеспечить повышение стабильности в определении высоты платформы на базе привязного беспилотного летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| СПОСОБ УПРАВЛЕНИЯ МАРШРУТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2751367C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Автономный быстроразворачиваемый мобильный комплекс радиосвязи КВ, УКВ диапазонов | 2024 |
|
RU2832436C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАГРЕВАНИЯ КАБЕЛЬ-ТРОСА ПРИВЯЗНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2828243C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| Устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат | 2022 |
|
RU2791943C1 |
| Способ защиты объектов от ударных беспилотных летательных аппаратов ближнего и малого радиуса действия с помощью электромагнитного излучения сантиметрового диапазона длин волн | 2024 |
|
RU2838454C1 |
Изобретение относится к определению высоты платформы при помощи беспилотного летательного аппарата (БПЛА). Сущность предлагаемого изобретения заключается в том, что в способе определения высоты платформы из привязного БПЛА, на нижней точке силиконовой резины, выполненной в виде оболочки по всей длине кабель-троса привязного БПЛА, осуществляющего электрическое питание БПЛА, возбуждают сверхвысокочастотные (СВЧ) электромагнитные колебания с возможностью их передачи и приема, колебания от точки возбуждения по наружной поверхности силиконовой оболочки направляют в сторону нижней части рамы БПЛА, представляющей электрический контакт конца кабель-троса с входом преобразователя электрической энергии, расположенного на раме БПЛА, принимают отраженные от конца кабель-троса колебания и по преобразованию скорости распространения электромагнитных колебаний в свободном пространстве с и времени t распространения колебаний от нижней точки до верхней точки кабель-троса и от верхней точки до нижней точек кабель-троса вычисляют через длину кабель-троса высоту платформы из привязного БПЛА. Техническим результатом изобретения является повышение стабильности в определении высоты платформы из привязного БПЛА. 1 ил.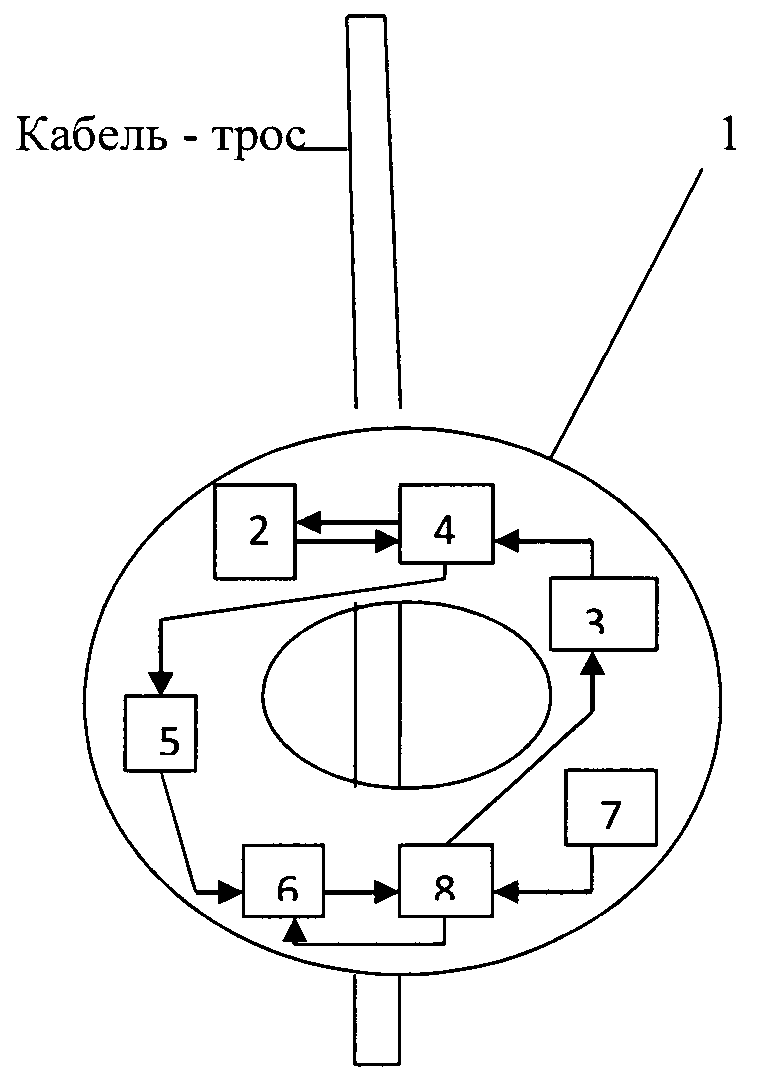
Способ определения высоты платформы из привязного беспилотного летательного аппарата, характеризующийся тем, что на нижней точке силиконовой резины, выполненной в виде оболочки по всей длине кабель-троса привязного беспилотного летательного аппарата, осуществляющего электрическое питание летательного аппарата, возбуждают сверхвысокочастотные (СВЧ) электромагнитные колебания с возможностью их передачи и приема, колебания от точки возбуждения по наружной поверхности силиконовой оболочки направляют в сторону нижней части рамы летательного аппарата, представляющей электрический контакт конца кабель-троса с входом преобразователя электрической энергии, расположенного на раме летательного аппарата, принимают отраженные от конца кабель-троса колебания и по преобразованию скорости распространения электромагнитных колебаний в свободном пространстве с и времени t распространения колебаний от нижней точки до верхней точки кабель-троса и обратно вычисляют через длину кабель-троса высоту платформы из привязного беспилотного летательного аппарата.
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2711325C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРОСНАБЖЕНИЯ ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2013 |
|
RU2554723C2 |
| US 20110180667 A1, 28.07.2011 | |||
| JP 2020006953 A, 16.01.2020. | |||

