Настоящее изобретение относится к устройству для подсоединения подводящих труб для пластмассовых компонентов к внутреннему каналу анкерного болта герметичным способом.
Анкерный болт можно использовать для стабилизации образования толщи горных пород посредством сверления отверстия в толще горных пород, введения анкерного болта в высверленное отверстие и закрепления анкерного болта на месте цементным раствором или смолой. Известно использование самосверлящего анкерного болта.
Устройство для подсоединения подводящих труб к внутреннему каналу анкерного болта описано в предшествующей заявке Германии 10 2005050929.0-24 А1 настоящего заявителя. Устройство, раскрытое в этом документе, подает пластмассовые компоненты отдельно к внутреннему каналу анкерного болта, который имеет стационарный миксер для смешивания компонентов. Этот документ раскрывает выбор пластмассовых компонентов так, чтобы их время выдержки было по существу таким же, как время для заполнения внутреннего канала и высверленного отверстия, окружающего анкерный болт. Таким образом, пластмассовые компоненты твердеют таким способом, что анкерный болт дольше не выпадает из высверленного отверстия и никакой пластмассовый материал не просачивается из высверленного отверстия. Этот способ обеспечивает возможность быстрой установки анкерных болтов на месте, поскольку нет необходимости ждать отверждения или уплотнения высверленного отверстия.
Целью настоящего изобретения является создание устройства для обеспечения по существу герметичного соединения, например, под давлением более 100 бар, так, чтобы автоматическую работу можно было проводить с улучшенной надежностью работы.
Согласно изобретению создано устройство для обеспечения по существу герметичного соединения между источником пластмассового компонента и отверстием внутреннего канала анкерного болта, содержащее центральный блок, выполненный подвижным для выравнивания с анкерным болтом, подводящую трубу, расположенную с возможностью скольжения в центральном блоке, первый передатчик силы, захватное устройство для прикрепления центрального блока к анкерному болту, привод захватного устройства, скользящим образом установленный на центральном блоке и выполненный с возможностью управлять захватным устройством, и второй передатчик силы, при этом первый передатчик силы способен выдавливать подводящую трубу в отверстие внутреннего канала анкерного болта, захватное устройство установлено на центральном блоке, и второй передатчик силы выполнен с возможностью управлять приводом захватного устройства для зажима захватным устройством центрального блока на анкерном болте.
Преимущества изобретения включают в себя возможность приложения силы прижима очень тесного контакта, поскольку анкерный болт не может двигаться. При использовании двух передатчиков силы, к которым силу можно прикладывать отдельно, возможна гибкая управляющая логика, в которой с помощью соответствующей блокировки гидравлических соединений можно избежать случайной подачи пластмассовых компонентов, даже при управлении вручную. Можно выполнять компактную конструкцию, потому что подводящая труба скользит в центральном блоке. Преимущество наличия компактной конструкции состоит в том, что устройство является маневренным и легко устанавливаемым полностью вровень с анкерным болтом.
В некоторых вариантах осуществления первый передатчик силы обеспечен подводящей трубой и центральным блоком, выполненным в виде первой гидравлической пары камеры/поршня. Камеру и поршень можно располагать концентрически друг относительно друга и поддерживающими друг друга. В некоторых вариантах осуществления подводящая труба имеет ступенчатую форму, образующую поршень, а центральный блок имеет соответственно углубление ступенчатой формы, такое, что поршень подводящей трубы направлен в ступенчатую камеру центрального блока, для образования первой гидравлической пары камеры/поршня. В некоторых вариантах осуществления камера первой гидравлической пары является кольцевой камерой, например, образованной ступенчатым углублением центрального блока, подводящей трубой и поршнем подводящей трубы.
В некоторых вариантах осуществления второй передатчик силы обеспечен приводом захватного устройства и центральным блоком, выполненным в виде гидравлической пары камеры/поршня. Камеру и поршень можно располагать концентрически друг относительно друга и поддерживающими друг друга. В некоторых вариантах осуществления центральный блок может иметь ступенчатую форму, а привод захватного устройства может иметь соответственно углубление ступенчатой формы, такое, что центральный блок образует поршень, который направлен в ступенчатую камеру привода захватного устройства для образования второй гидравлической пары камеры/поршня. В некоторых вариантах осуществления камера второй гидравлической пары образуется углублением ступенчатой формы привода захватного устройства, центральным блоком и подводящей трубой.
Преимущества использования первого и второго передатчиков силы в виде гидравлических пар камеры/поршня, расположенных концентрически друг относительно друга на центральном блоке, включают в себя то, что устройство таким образом можно прикреплять к салазкам или подобному транспортному устройству и можно легко располагать вровень перед анкерным стержнем, введенным в высверленное отверстие. Выполнение первого и второго передатчиков силы таким способом обеспечивает простую конструкцию передатчиков силы, поскольку в качестве гидравлических компонентов используют простые доступные компоненты. Поэтому эти признаки способствуют компактной конструкции устройства.
В некоторых вариантах осуществления центральный блок имеет направляющую трубу, проходящую от его стороны, обращенной от анкерного болта, в которой привод захватного устройства скользящим образом установлен на направляющей трубе, для образования второй гидравлической пары камеры/поршня. Преимущества этого варианта осуществления включают в себя уменьшение размера устройства без уменьшения функциональной способности.
В некоторых вариантах осуществления захватное устройство имеет плечи, поворотно установленные на центральном блоке, а привод захватного устройства имеет коленчатые рычаги, поворотно соединенные с плечами захватного устройства, при этом привод захватного устройства способен перемещаться между первым положением, в котором плечи захватного устройства открыты, и вторым положением, в котором коленчатые рычаги зацеплены, чтобы закрывать плечи захватного устройства. В некоторых вариантах осуществления плечи захватного устройства могут содержать кулачки для зацепления анкерного болта. Преимущества этого варианта осуществления включают в себя то, что он предусматривает компактную конструкцию, обеспечена большая сила захвата и возможен надежный захват анкерного болта даже с небольшим гидравлическим давлением.
В некоторых вариантах осуществления подводящая труба может содержать питающие трубы для, по меньшей мере, двух пластмассовых компонентов. Подводящая труба может иметь множество полостей для подачи, по меньшей мере, двух пластмассовых компонентов. Преимущества соединения питающих труб в одну подводящую трубу включают в себя легкое обеспечение подачи обоих пластмассовых компонентов во внутренний канал в одно и то же время и с заданной интенсивностью. Таким образом, предотвращаются ситуации, в которых один конкретный компонент, который не отвержден, подается в избытке во внутренний канал и в высверленное отверстие и после этого, просачиваясь, вызывает загрязнение окружающей среды.
В некоторых вариантах осуществления подводящая труба может иметь две концентрические трубы, расположенные одна в другой для образования кольцевой трубы и центральной трубы для отдельной подачи пластмассовых компонентов. Преимущества этого варианта осуществления включают в себя то, что оба пластмассовых компонента подают отдельно и надежно, оставляя свободное пространство, без вероятности повреждения на соединение устройства с внутренним каналом анкерного болта.
В некоторых вариантах осуществления привод захватного устройства можно смещать в первое положение, в котором плечи захватного устройства открыты. Привод захватного устройства можно смещать в первое положение пружиной. Пружину можно располагать напротив центрального блока. Преимущества этого расположения состоят в обеспечении возможности автоматической работы в связи с тем, что устройство можно перемещать в отверстие анкерного стержня и выравнивать вровень с ним без риска повреждения захватного устройства и плеч захватного устройства.
В некоторых вариантах осуществления устройство может содержать соединительную деталь для соединения подводящей трубы с питающими трубами, прикрепленную разъемным образом к устройству, например ее можно разъемным образом прикреплять к подводящей трубе. Соединительную деталь можно разъемным образом прикреплять к концу подводящей трубы, обращенному от анкерного болта, например винтовыми фитингами. Преимущества этого варианта осуществления включают возможность использования соединительной детали для сборки устройства. Удаляя, например отвинчивая, соединительную деталь, устройство несколькими движениями, руками, без использования инструментов, можно демонтировать, когда возникают повреждения, что особенно важно в подземной разработке.
В некоторых вариантах осуществления подводящую трубу образуют из двух концентрических труб, размещенных одна в другой, чтобы образовать кольцевую полость и центральную полость для отдельной подачи пластмассовых компонентов, при этом соединительная деталь имеет радиальное соединение для питающей трубы для соединения питающей трубы с кольцевой полостью и соосное соединение для питающей трубы для соединения питающей трубы с центральной полостью. Преимущества этого варианта осуществления включают в себя обеспечение простого соединения питающих труб с подводящей трубой для подачи пластмассовых компонентов надежно и раздельно.
Согласно изобретению также создано устройство для подсоединения герметичным способом подводящих труб для пластмассовых компонентов к внутреннему каналу анкерного болта, отверстию, в которое выступает анкерный болт от высверленного отверстия, в котором пластмассовые компоненты после смешивания отверждаются, чтобы зацементировать анкерный болт в высверленном отверстии, отличающееся тем, что питающие трубы (28, 29) соединены в одну подводящую трубу (8), направленную для скольжения в центральном блоке (5), установленном (опорная рама 1) так, чтобы подводящая труба была вровень с анкерным болтом (3), подводящая труба (8) может вдавливаться с питающими трубами в отверстие анкерного болта, выступающее от скальной породы, посредством первого передатчика силы (прессующее устройство 20, 21), центральный блок может зажиматься на головке анкерного болта, выступающего от скальной породы, посредством второго передатчика силы (зажимного приспособления), прессующее устройство и привод 15 захватного устройства, каждый, сконструирован в виде гидравлической пары цилиндра/поршня, которые концентрически расположены друг относительно друга и поддерживают друг друга в центральном блоке и на нем.
В некоторых вариантах осуществления прессующее устройство образовано подводящей трубой, направляемой в качестве ступенчатого поршня (20) в центральном блоке, образуя цилиндр и ступенчатую цилиндрическую камеру (21).
В некоторых вариантах осуществления привод захватного устройства содержит рычаги (11) и второй передатчик силы, при этом рычаги имеют двойные плечи (двухплечевые рычаги 11), каждый двухплечевой рычаг состоит из плеча, имеющего кулачки (12), и плеча, к которому прикладывается сила, каждый двухплечевой рычаг способен поворачиваться относительно вала (10) рычагов, прикрепленного к центральному блоку, второй передатчик силы образован так, что блок (13) привода коленчатого рычага установлен для скольжения на центральном блоке, предпочтительно на направляющей трубе 7, прикрепленной к блоку (13) привода коленчатого рычага и концентрически к направляющей трубе, образованной ступенью диаметра кольцевой цилиндрической камеры (16), и блок привода коленчатого рычага соединен с частями плеч рычага, к которым прикладывается сила, посредством соединения (14) коленчатого рычага.
В некоторых вариантах осуществления блок привода коленчатого рычага служит опорой пружине (23) напротив центрального блока с целью ослабления захватов (13).
В некоторых вариантах осуществления подводящая труба имеет концентрические трубы, расположенные одна в другой, которые образуют кольцевую трубу и центральную трубу, чтобы отдельно подавать пластмассовые компоненты.
В некоторых вариантах осуществления подводящая труба (8) соединена с питающими трубами посредством соединительной детали, которая прикреплена разъемным образом к концу, обращенному от анкерного болта.
В некоторых вариантах осуществления в соединительной детали кольцевая труба соединена с одной пластмассовой питающей трубой посредством пластмассового канала, соединенного радиально, а центральная труба соединена с другой пластмассовой питающей трубой посредством соосного пластмассового канала.
В некоторых вариантах осуществления центральный блок на стороне, обращенной от анкерного болта, имеет направляющую трубу (7) меньшего диаметра, на которой установлен блок привода коленчатого рычага так, чтобы перемещать образование ступени диаметра.
Должно быть понятно, что по существу герметичное соединение означает соединение, в котором любое падение давления между факультативным источником под давлением пластмассовых компонентов и внутренним каналом анкерного болта сведено к минимуму, чтобы быть недостаточным для влияния на эффективность и/или надежность работы устройства.
Ниже изобретение описано с помощью примерного варианта осуществления. Конкретно изобретение иллюстрировано со ссылкой на следующие прилагаемые чертежи, которые не предназначены, чтобы ограничивать объем формулы изобретения и на которых изображено следующее:
фиг.1 показывает вид сверху варианта осуществления изобретения; и
фиг.2A и 2B соответственно показывают вид сбоку и вид в поперечном разрезе варианта осуществления изобретения.
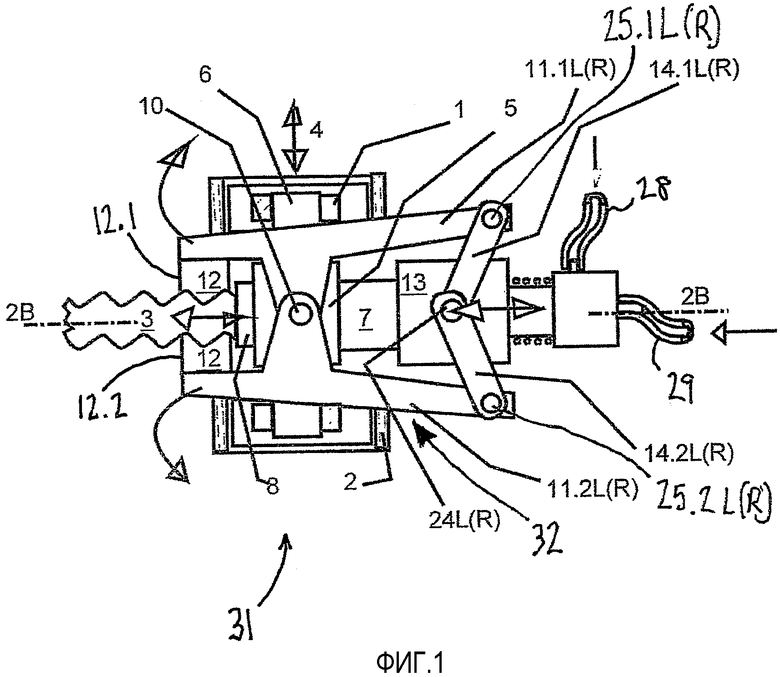
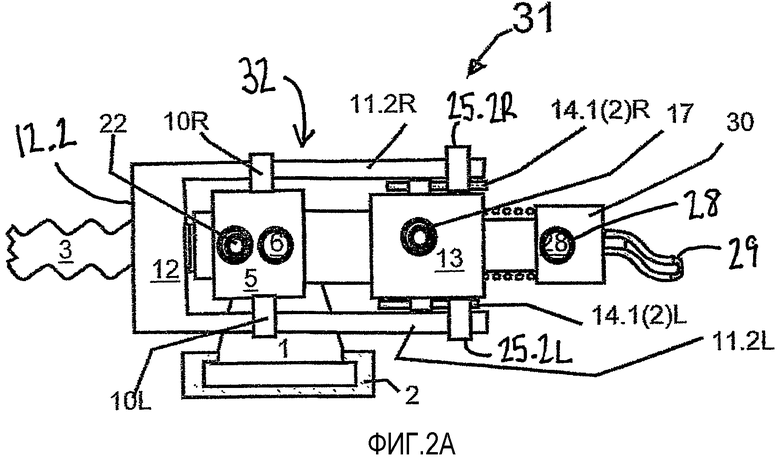
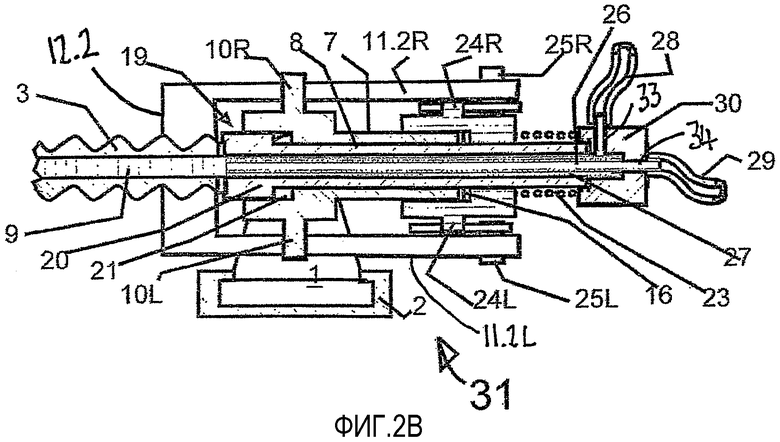
Фиг.1, 2A и 2B показывают компактное устройство 31 для соединения источника пластмассовых компонентов в форме питающих труб 28, 29 для пластмассовых компонентов с внутренним каналом 9 анкерного болта 3 по существу герметичным способом. При использовании анкерный болт 3, в общем, расположен в высверленном отверстии (не показано) таким образом, что ближайший конец анкерного болта 3 выступает из высверленного отверстия. Анкерный болт 3 имеет отверстие, а внутренний канал 9 анкерного болта 3 содержит стационарный миксер (не показан). Устройство 31 имеет центральный блок 5, подводящую трубу 8 для подачи пластмассовых компонентов, первый передатчик 20, 21, 22 силы для вдавливания подводящей трубы 8 в отверстие анкерного болта 3, захватное устройство 32 для прикрепления центрального блока 5 к анкерному болту 3, привод 13 захватного устройства для управления захватным устройством 32, второй передатчик 16, 17 силы для приведения в действие привода захватного устройства для управления захватным устройством 32, чтобы прижимать центральный блок 5 к внешней стороне ближайшего конца анкерного болта 3, опорную раму 1, которая приспособлена для установления с возможностью перемещения направляющей 2, пружину 23 и соединительную деталь 30 для подсоединения питающих труб 28, 29 к подводящей трубе 8.
Центральный блок 5 образует внутренний цилиндрический канал для размещения с возможностью скольжения в подводящей трубе 8. Центральный блок 5 имеет анкерный болт 3, обращенный к отдаленному от центра концу, на котором образована камера 21 блока ступенчатой формы. На ближайшем конце центрального блока 5, который находится напротив анкерного болта 3, центральный блок 5 образует направляющую трубу 7. Центральный блок 5 установлен на опорной раме 1, которая установлена с возможностью скольжения в направляющей 2 таким образом, что устройство может перемещаться вбок относительно анкерного болта 3 вдоль оси 4 перемещения. Центральный блок 5 может поворачиваться в опорной раме 1 относительно оси 6 поворота, которая параллельна направляющей 2.
Подводящая труба 8 имеет на своем отдаленном от центра конце ступенчатый поршень 20, который имеет форму, соответствующую камере 21 блока центрального блока 5 таким образом, что ступенчатый поршень 20 и камера 21 блока образуют первую гидравлическую пару камеры/поршня или первый передатчик силы. Гидравлическая камера 21 блока имеет кольцевую форму, поскольку она образована центральным блоком 5, подводящей трубой 8 и ступенчатым поршнем 20. Текучая среда подается в гидравлическую камеру 21 блока гидравлической линией 22. Отдаленный от центра конец ступенчатого поршня 20 приспособлен для вдавливавания в отверстие анкерного болта 3. Ближайший конец подводящей трубы 8 прикреплен к соединительной детали 30, например винтовым фитингом (не показан), таким образом, что его можно легко удалять.
Когда устройство расположено вровень с анкерным болтом 3 и гидравлической линией 22 управляют, чтобы заполнять гидравлическую камеру 21 блока, ступенчатый поршень 20 перемещается от центра в направлении от центрального блока таким образом, что он упирается в ближайший конец анкерного болта 3 и поднимается с усилием вверх.
Подводящая труба 8 имеет внутреннюю трубу 26 и внешнюю трубу 27, которая образует внешнюю часть трубы 8. Таким образом, подводящая труба 8 имеет две полости для отдельной подачи пластмассовых компонентов, и эти полости являются кольцевой и центральной полостями. Соединительная деталь 30 прикреплена к ближайшему концу подводящей трубы 8. Соединительная деталь 30 имеет радиальное соединение 33 для питающей трубы 28 для соединения питающей трубы 28 с кольцевой полостью и соосное соединение 34 для питающей трубы 29 для соединения питающей трубы 29 с центральной полостью.
Захватное устройство 32 имеет четыре плеча 11.1L, 11.2L, 11.1R, 11.2R, которые установлены на центральном блоке 5 на осях 10R, 10L поворота таким образом, что плечи 11.1L, 11.2L установлены на оси 10L поворота, а плечи 11.1R, 11.2R установлены на оси 10R поворота. На отдаленном от центра конце захватного устройства 32, плечи 11.1L и 11.1R соединены кулачками 12.1, а плечи 11.2L и 11.2R соединены кулачками 12.2 таким образом, что кулачки 12.1, 12.2 выполнены с возможностью зацепления внешней части ближайшего конца анкерного болта 3. На ближайшем конце захватного устройства 32 плечи 11.1L, 11.2L, 11.1R, 11.2R захватного устройства 32 соединены с приводом 13 коленчатыми рычагами 14.1L, 14.2L, 14.1R, 14.2R на шкворнях 25.1L, 25.2L, 25.1R, 25.2R соответственно.
Привод 13 захватного устройства образует внутренний цилиндрический канал для размещения с возможностью скольжения подводящей трубы 8. Привод 13 захватного устройства образует на своем отдаленном от центра конце камеру 16 ступенчатой формы, предназначенную для размещения направляющей трубы 7 таким образом, что направляющая труба 7 и камера 16 образуют вторую гидравлическую пару камеры 16/поршня 7 или второй передатчик силы. Текучая среда подается в камеру 16 гидравлической парой 17. Камера 16 имеет кольцевую форму, поскольку она образована приводом 13 захватного устройства, подводящей трубой 8 и направляющей трубой 7. Подачей текучей среды в первую и вторую гидравлические пары камеры/поршня управляет устройство управления (не показано).
Привод 13 захватного устройства имеет коленно-рычажные соединения 24L, 24R. Коленчатые рычаги 14.1L, 14.2L прикреплены к коленно-рычажному соединению 24L, а коленчатые рычаги 14.1R, 14.2R прикреплены к коленно-рычажному соединению 24R. Коленчатые рычаги 14.1L, 14.2L, 14.1R, 14.2R выполнены таким образом, что, когда устройство расположено вровень с анкерным болтом 3 и второй гидравлической парой камеры 16/поршня 7 управляют так, чтобы камера 16 была заполнена текучей средой из гидравлического соединения 17, привод 13 захватного устройства перемещается ближе к месту прикрепления, скользя на подводящей трубе 8 от направляющей трубы 7, коленчатые рычаги 14.1L, 14.2L, 14.1R, 14.2R выдвигаются наружу, чтобы поворачивать четыре плеча 11.1L, 11.2L, 11.1R, 11.2R захватного устройства относительно осей 10R, 10L поворота таким образом, что кулачки 12.1, 12.2 сжимаются на внешней части ближайшего конца анкерного болта 3.
Пружина 23 расположена на внешней стороне подводящей трубы 8, и каждый конец пружины 23 прикреплен к приводу 13 захватного устройства и к соединительной детали 30 таким образом, что, когда привод 13 захватного устройства перемещается, пружина 23 сжимается таким образом, что когда текучая среда вытекает из гидравлической камеры 16 и из гидравлической камеры 21 блока, пружина 23 перемещает привод 13 захватного устройства от центра подводящей трубы 8 таким образом, что они возвращаются в свои исходные положения.
В качестве альтернативы, прилагаемые чертежи можно описать следующим образом. Устройство для подсоединения герметичным способом подводящих труб для пластмассовых компонентов к внутреннему каналу анкерного болта, отверстию, в которое выступает анкерный болт из высверленного отверстия, имеет два гидравлических передатчика силы, зажимное приспособление и прессующее устройство 20, 21, функционирующие как цилиндрические поршневые узлы. Передатчики силы имеют общий элемент, центральный блок 5. Этот центральный блок 5 можно зажимать на анкерном стержне 3 зажимным приспособлением, и он имеет концентрически расположенную подводящую трубу, которую можно подсоединять герметичным способом к соединению анкерного стержня 3.
Центральный блок образует, на одной стороне зажимного приспособления, неподвижный поршень для цилиндра, который является подвижным ведомым на нем, блок 13 привода коленчатого рычага, который служит в качестве зажимного приспособления.
Центральный блок 5 образует, на другой стороне, неподвижный цилиндр для подводящей трубы 7, сконструированной в виде поршня, и служит прессующим устройством 20, 21.
Сила зажимного приспособления увеличена соединением коленчатого рычага.
Устройство состоит из следующих элементов.
Опорная рама 1 направлена так, чтобы она поступательно перемещалась в направляющей 2 с осью 4 перемещения, выровненной перпендикулярно к анкерному стержню 3. Центральный блок 5 может поворачиваться в опорной раме относительно оси 6 поворота (оси выравнивания), которая параллельна оси 4 перемещения опорной рамы. Направляющая труба 7 является составляющей частью центрального блока и прочно соединена с центральным блоком 5.
Подводящая труба 8 для подачи отверждающих пластмассовых компонентов во внутренний канал 9 анкерного стержня 3 направлена в центральный блок, с подводящей трубой 7, прикрепленной к нему, расположена концентрически и способна скользить, при этом ось подводящей трубы по существу пересекает ось 6 выравнивания центрального блока 5.
С помощью поступательного движения и размещения опорной рамы 1 в направляющей 2 и поворачивая центральный блок 5 относительно оси 6 поворота (оси выравнивания), которая параллельна оси 4 перемещения опорной рамы, направляющую трубу 8 можно устанавливать вровень с анкерным стержнем 3 и соединением его внутреннего канала.
Два поворотных шкворня 10.L и 10.R прочно прикреплены к центральному блоку 5 справа и слева (сверху и снизу) перпендикулярно оси 6 выравнивания и направляющей 2. Эти поворотные шкворни используют в качестве вала захватов 11. Захваты имеют две пары 11.1 и 11.2 двухплечевого рычага, которые могут поворачиваться в противоположных направлениях. Каждая пара двухплечевого рычага состоит из двух левых двухплечевых рычагов 11.1L и 11.2L и двух правых двухплечевых рычагов 11.1R и 11.2R.
Двухплечевые рычаги каждой пары, которые параллельны друг другу, соединены друг с другом на конце одного плеча, плеча захватного устройства, крестовиной. Эти крестовины служат и сконструированы в качестве кулачков 12 захватного устройства для зажима и захвата конца анкерного стержня 3.
Двухплечевые рычаги каждой пары, которые параллельны друг другу, присоединены на свободном конце другого плеча, плечом рычага, к которому прикладывается сила, к паре коленчатых соединительных рычагов.
Блок 13 привода коленчатого рычага используют, чтобы управлять захватами. Захваты направляются так, чтобы они скользили, концентрически к внешней окружности центрального блока и направляющей трубы 7, прикрепленной к нему, на внешней окружности направляющей трубы. Блок 13 используется для управления двумя идентичными парами 14.1L и 14.2L коленчатого рычага, а также 14.1R и 14.2R, которые с их центральными соединениями 24L и 24R соединены со шкворнями, с обеих сторон, левой и правой, блока привода коленчатого рычага и подсоединены на своих свободных концах, в каждом случае, к другому концу двухплечевых рычагов 11.
Гидравлический привод 15 захватного устройства образован внутри (фиг.2B) блока 13 привода коленчатого рычага, образуя цилиндрическую камеру 16 с центральным блоком и направляющей трубой 7, в которой установлен центральный блок, и блок 13 привода коленчатого рычага напротив центрального блока можно перемещать поршневым способом. Цилиндрическая камера уплотнена напротив направляющей трубы 7 на концах, и она имеет гидравлическое соединение 17 (фиг.2A). Блок 13 привода коленчатого рычага опирается на пружину 23 напротив направляющей трубы с целью ослабления коленчатого рычага так, чтобы пары коленчатого рычага выгибались относительно соединения 24L и 24R коленчатого рычага, и кулачки 12 захватного устройства перемещались с целью ослабления. Привод 15 гидравлического захватного устройства функционирует таким способом, что блок 13 привода коленчатого рычага перемещается против силы пружины 23 гидравлическим давлением, созданным в цилиндрической камере с целью удлинения пар коленчатого рычага. Посредством этого удлинения кулачки 12 захватного устройства перемещаются с целью напряжения так, чтобы кулачки захватного устройства крепко захватили анкерный стержень 3, обеспеченный резьбой на своей периферии, зажали на центральном блоке посредством поворотных шкворней 10R и 10L, и наоборот. Когда это осуществлено посредством привода захватного устройства, прикладывающего гидравлическое давление, подводящую трубу 8 можно вдавить герметизирующим образом в отверстие внутреннего канала 9 анкерного стержня 3 со стационарным миксером, размещенным в нем. С этой целью используют гидравлический уплотняющий привод 19. Он образован подводящей трубой на ее внешней периферии, сконструированной в виде ступенчатого поршня 20, который внутри центрального блока 5, сконструированного с многоступенчатым диаметром, образует цилиндрическую камеру 21. Эта цилиндрическая камера разделена уплотняющим образом на одной стороне концом подводящей трубы 8 с большим диаметром, а на другой стороне - ступенью уменьшающего диаметра внутри центрального блока 5. Цилиндрическая камера 21 соединена с гидравлической линией 22.
На фиг.2B показаны уплотнения для уплотнения гидравлических цилиндрических камер. Использование таких уплотнений известно специалистам в области гидравлики, и поэтому не описано в данном документе.
Если подводящая труба 8 вдавлена в отверстие внутреннего канала 9 анкерного стержня 3, можно подавать пластмассовые компоненты. Для этого две трубы размещают во внутреннем канале подводящей трубы 8, в частности внутреннюю трубу 26 и внешнюю трубу 27, которые являются концентрическими друг относительно друга. Для соединения этих труб с пластмассовыми питающими трубами 28, 29 на центральный блок навинчена гидродинамическая муфта 30, в частности на конец направляющей трубы, выступающий из блока 13 привода коленчатого рычага. Шланги пластмассовых питающих труб 28, 29 прикреплены к гидравлической муфте 30 с внешней стороны. Шланги у них имеют отдельные каналы для внутренней трубы и внешней трубы. Гидравлическую муфту можно также использовать, чтобы поддерживать пружину 23.
Важно, чтобы пластмассовые компоненты оставались разделенными, пока они не достигнут соединения с внутренним каналом 9 анкерного стержня 3, и чтобы они смешивались только в анкерном стержне в стационарном миксере, размещенном в нем. Таким образом, время реакции для отверждения пластмассовых компонентов начинается в тот же момент времени, что и время заполнения для заполнения высверленного отверстия, включая внутренний канал анкерного стержня. Поэтому необходимое время заполнения и время реакции можно точно согласовывать друг с другом, регулируя коэффициент наполнения пластмассовых компонентов.
Изобретение относится к устройству для подсоединения подводящих труб для пластмассовых компонентов к внутреннему каналу анкерного болта герметичным способом. Техническим результатом является обеспечение герметичного соединения так, чтобы автоматическую работу можно было проводить с улучшенной надежностью работы. Устройство содержит центральный блок, выполненный подвижным для выравнивания с анкерным болтом, скользящую подводящую трубу, расположенную в центральном блоке, первый передатчик силы, захватное устройство для прикрепления центрального блока к анкерному болту, привод захватного устройства, скользящим образом установленный на центральном блоке и предназначенный для управления захватным устройством, и второй передатчик силы, при этом первый передатчик силы выполнен с возможностью вдавливания подводящей трубы в отверстие внутреннего канала анкерного болта, захватное устройство установлено на центральном блоке, и второй передатчик силы выполнен с возможностью управления приводом захватного устройства для зажатия захватным устройством центрального блока на анкерном болте. 18 з.п. ф-лы, 3 ил.
1. Устройство для обеспечения по существу герметичного соединения между источником пластмассовых компонентов и отверстием внутреннего канала анкерного болта, содержащее центральный блок, выполненный подвижным для выравнивания с анкерным болтом, скользящую подводящую трубу, расположенную в центральном блоке, первый передатчик силы, захватное устройство для прикрепления центрального блока к анкерному болту, привод захватного устройства, скользящим образом установленный на центральном блоке и предназначенный для управления захватным устройством, и второй передатчик силы, при этом первый передатчик силы выполнен с возможностью вдавливания подводящей трубы в отверстие внутреннего канала анкерного болта, захватное устройство установлено на центральном блоке, и второй передатчик силы выполнен с возможностью управления приводом захватного устройства для зажатия захватным устройством центрального блока на анкерном болте.
2. Устройство по п.1, в котором первый передатчик силы обеспечен подводящей трубой и центральным блоком и выполнен в виде первой гидравлической пары камеры/поршня.
3. Устройство по п.2, в котором подводящая труба имеет ступенчатую форму, а центральный блок имеет соответственно углубление ступенчатой формы так, что подводящая труба образует поршень, направляемый в ступенчатую цилиндрическую камеру центрального блока для образования первой гидравлической пары камеры/поршня.
4. Устройство по п.1, в котором второй передатчик силы обеспечен приводом захватного устройства и центральным блоком и выполнен в виде гидравлической пары камеры/поршня.
5. Устройство по п.4, в котором центральный блок имеет ступенчатую форму, а привод захватного устройства имеет соответственно углубление ступенчатой формы так, что центральный блок образует поршень, направляемый в ступенчатую цилиндрическую камеру привода захватного устройства для образования второй гидравлической пары камеры/поршня.
6. Устройство по п.5, в котором центральный блок имеет направляющую трубу, проходящую от его стороны, обращенной от анкерного болта для образования поршня, при этом привод захватного устройства скользящим образом установлен на направляющей трубе для образования второй гидравлической пары камеры/поршня.
7. Устройство по п.1, в котором захватное устройство имеет плечи, поворотно установленные на центральном блоке, и привод захватного устройства имеет коленчатые рычаги, поворотно соединенные с плечами захватного устройства, при этом привод захватного устройства способен перемещаться между первым положением, в котором плечи захватного устройства открыты, и вторым положением, в котором коленчатые рычаги зацеплены для закрытия плечей захватного устройства.
8. Устройство по п.7, в котором привод захватного устройства смещен в первое положение.
9. Устройство по п.7, в котором плечи захватного устройства содержат кулачки для зацепления анкерного болта.
10. Устройство по п.1, в котором подводящая труба содержит питающие трубы для по меньшей мере двух пластмассовых компонентов.
11. Устройство по п.1, которое содержит соединительную деталь для соединения подводящей трубы с питающими трубами, прикрепленную разъемным образом к подводящей трубе.
12. Устройство по п. 11, в котором подводящая труба образована из двух концентрических, расположенных одна в другой труб, для образования кольцевой трубы и центральной трубы для отдельной подачи пластмассовых компонентов, при этом соединительная деталь имеет радиальное соединение для питающей трубы для соединения питающей трубы с кольцевой трубой и соосное соединение для питающей трубы для подсоединения питающей трубы к центральной трубе.
13. Устройство по п.2, в котором первая гидравлическая пара содержит камеру и поршень, расположенные концентрически друг относительно друга и поддерживающие друг друга.
14. Устройство по п.4, в котором гидравлическая пара содержит камеру и поршень, расположенные концентрически друг относительно друга и поддерживающие друг друга.
15. Устройство по п.8, в котором привод захватного устройства смещен в первое положение пружиной.
16. Устройство по п.15, в котором пружина расположена напротив центрального блока.
17. Устройство по п.10, в котором подводящая труба имеет множество полостей для подачи по меньшей мере двух пластмассовых компонентов.
18. Устройство по п.10, в котором подводящая труба образована из двух концентрических, расположенных одна в другой труб, для образования кольцевой трубы и центральной трубы для отдельной подачи пластмассовых компонентов.
19. Устройство по п.11, в котором соединительная деталь разъемным образом прикреплена к концу подводящей трубы, обращенному от анкерного болта.
| DE 102005050929 A1, 27.04.2006 | |||
| Способ установки железобетонных анкеров и устройство для его осуществления | 1976 |
|
SU877049A1 |
| Способ установки железобетонного анкера и устройство для его осуществления | 1988 |
|
SU1559188A1 |
| АНКЕР ДЛЯ ЗАКРЕПЛЕНИЯ СТРОИТЕЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2260649C1 |
| US 2002119014 A, 29.08.2002. | |||

