Изобретение относится к системам подрессоривания транспортных средств и может быть использовано на автомобилях, где полезная нагрузка изменяется в широких пределах.
Известно устройство [1] для подрессоривания транспортного средства, содержащее торсион, рабочее тело которого представляет собой вал цилиндрической формы с головками на концах для закрепления.
Недостатком этой конструкции является то что, нагрузочная характеристика подвески со слабо выраженной нелинейностью не позволяет получить достаточную плавность хода транспортного средства при различных нагрузках на ось, когда полезная нагрузка меняется в широких пределах и динамический прогиб не соответствует допускаемому значению, что трудно осуществить конструктивно.
Известны пучковые и пластинчатые [2] торсионы, которые представляют собой рессору кручения, состоящие из нескольких стержней круглого сечения с шестигранными головками или пластин, соединенных между собой.
Недостатками этих конструкций являются то, что они не обеспечивают постоянную собственную частоту колебаний подрессоренной массы для малых значений виброперемещений независимо от статической нагрузки. Кроме того, все используемые торсионы обладают существенным недостатком - при наезде на препятствие одним колесом через рычаг торсиона с другой стороны вызывает отрыв колеса от дорожного полотна, в этом случае теряется контакт с дорожным покрытием и управляемость транспортного средства.
Предлагаемое изобретение решает задачу создания дополнительного упругого элемента, служащего для уменьшения коэффициента динамичности и корректировки нагрузочной характеристики при значительном превышении максимальной статической нагрузки над минимальной.
Технический результат - повышение плавности хода и устойчивость движения транспортного средства, влияющее на вибрационную безопасность человека и транспортного средства, полезная нагрузка которого меняется в широких пределах.
Указанный технический результат достигается тем, что дополнительный элемент подвески в виде торсиона выполнен из пружины с переменным шагом, работающей на кручение, обеспечивает постоянную собственную частоту колебаний для малых значений виброперемещений независимо от статической нагрузки и устойчивость управления.
Особенностью предлагаемого дополнительного упругого элемента является то, что торсион, выполненный в виде цилиндрической пружины кручения с переменным шагом витков, размещен в цилиндрический корпус, а для обеспечения его устойчивости при кручении в поперечном направлении внутрь пружины помещен усеченный конусный шток, диаметр основания которого меньше на 2d внутреннего диаметра пружины, один конец пружины присоединен к рычагу, жестко связанному с мостом транспортного средства, а другой - к диску, который, в свою очередь, также жестко связан с несущей рамой транспортного средства, рычаг также жестко связан с одним концом усеченного конусного штока, другой конец которого входит свободно в отверстие в диске, причем витки цилиндрической пружины с наименьшим шагом размещены на стороне диска, а с наибольшим - на стороне рычага.
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана конструктивная схема торсиона для подрессоривания транспортного средства, на фиг.2. представлена нагрузочная характеристика предлагаемого дополнительного упругого элемента.
Торсион для подрессоривания транспортного средства состоит из двух частей, одна из которых содержит цилиндрическую пружину 1, работающую на кручение, причем она имеет витки с переменным шагом и размещена в цилиндрическом корпусе 2, для обеспечения ее устойчивости в поперечном направлении при кручении, внутрь пружины 1 помещен усеченный конусный шток 3, максимальный диаметр основания которого меньше на 2d, а вершины - 3d внутреннего диаметра пружины 1, где d - диаметр проволоки пружины; один конец цилиндрической пружины 1 присоединен к рычагу 4, жестко связанному с мостом транспортного средства, и действует на одно колесо, другой конец - к диску 5, который, в свою очередь, жестко связан с подрессоренной частью в середине рамы транспортного средства, к диску 5 крепится вторая часть основания усеченного конусного штока 3 торсиона и действует на второе колесо, рычаг 4 также жестко связан с одним концом усеченного конусного штока 3, другой конец основания усеченного конусного штока 3 входит свободно в отверстие диска 5, причем витки цилиндрической пружины 1 с наименьшим шагом размещены на стороне диска 5, а с наибольшим - на стороне рычага 4 соответственно, тем самым обеспечивается постоянный контакт колеса с дорожным покрытием.
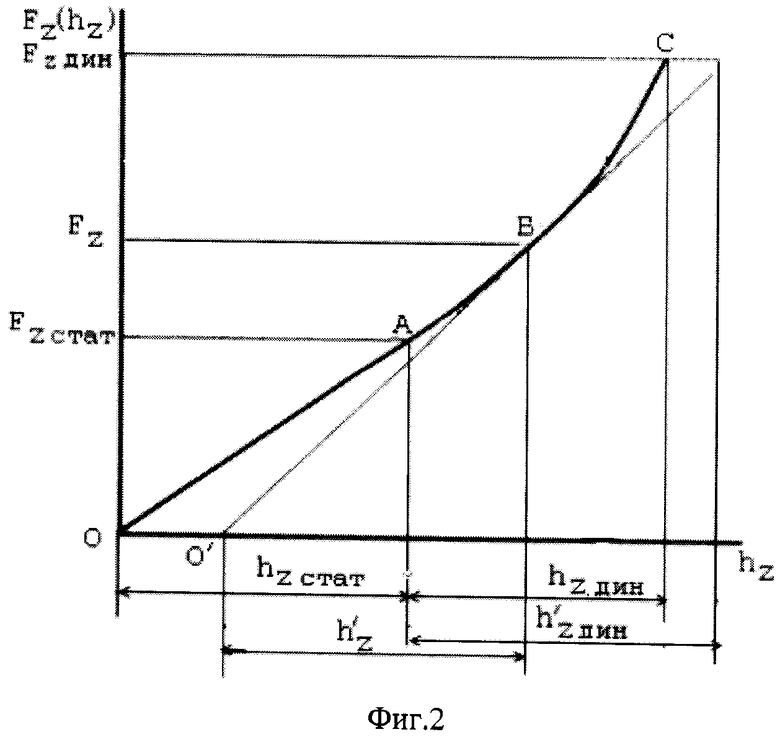
Для обеспечения плавности хода транспортного средства необходимо, чтобы нагрузочная характеристика (фиг.2) транспортного средства соответствовала созданию изохронной подвески. Она должна пройти через точку Б с координатами (hzстат; Fzстат), где hzстат - статический прогиб подвески; Fzстат - вертикальная статическая нагрузка, а во избежание ударов в ограничитель хода она должна заканчиваться в точке с координатами (hzдин; Fzдин), определяемой коэффициентом динамичности по прогибу подвески kдинh=hzдин/hzстат и по силе kдинF=Fzдин/Fzстат. Следовательно, нагрузочная характеристика торсиона без нижнего и верхнего ограничителей хода (буферов) должна иметь вид кривой в виде экспоненты. Требуемый коэффициент динамичности по силе kдинF можно получить при линейной нагрузочной характеристике, но при этом динамический прогиб будет иметь значение, большее, чем соответствующее допускаемому, что трудно осуществить конструктивно. Постоянную плавность хода можно обеспечить, сохраняя неизменным статический прогиб (собственную частоту). В этом случае для произвольной точки на фиг.2 должно иметь следующее равенство:  , где спр=dFz/dhz - коэффициент жесткости упругого устройства подвески в произвольной точке кривой на фиг.2. Данное выражение можно привести к виду dFz/Fz=dhz/hzстат, и решая это уравнение при начальных условиях hz=hzстат и Fz=Fzстат, получаем:
, где спр=dFz/dhz - коэффициент жесткости упругого устройства подвески в произвольной точке кривой на фиг.2. Данное выражение можно привести к виду dFz/Fz=dhz/hzстат, и решая это уравнение при начальных условиях hz=hzстат и Fz=Fzстат, получаем:  .
.
Таким образом, нагрузочная характеристика, которая изменяется согласно закону показательной функции при Fz≥Fzстат, обеспечивает постоянную собственную частоту колебаний  , где g - ускорение свободного падения.
, где g - ускорение свободного падения.
Нагрузочные характеристики с дополнительными упругими элементами предлагаемой конструкции могут служить для корректировки нагрузочной характеристики при значительном превышении максимальной статической нагрузки над минимальной. Поэтому переменный шаг p1 на одном и р2 на другом участке цилиндрической пружины 1 позволяют скорректировать общую жесткость с1 и с2 соответственно, а при расчетах используют приведенный коэффициент жесткости 
 , где
, где  - эквивалентный статический прогиб, соответствует собственной частоте fz колебаний подрессоренной массы. Можно получить выражение для приведенного коэффициента жесткости предлагаемого торсиона
- эквивалентный статический прогиб, соответствует собственной частоте fz колебаний подрессоренной массы. Можно получить выражение для приведенного коэффициента жесткости предлагаемого торсиона  , где hzдоп - прогиб дополнительного упругого элемента при ходе сжатия подвески. Эквивалентный статический прогиб
при нелинейной нагрузочной характеристике упругого элемента характеризует плавность хода и не зависит от изменения полезной нагрузки.
, где hzдоп - прогиб дополнительного упругого элемента при ходе сжатия подвески. Эквивалентный статический прогиб
при нелинейной нагрузочной характеристике упругого элемента характеризует плавность хода и не зависит от изменения полезной нагрузки.
Торсион работает следующим образом. При движении транспортного средства по неровностям дороги возникают динамические нагрузки. Подвеска из зоны статики переходит в зону динамики. При этом кроме элементов подвески вступают в работу дополнительные элементы цилиндрического пружинного торсиона на кручение. В поперечных сечениях витков передается момент T, равный внешнему моменту от колеса, закручивающему цилиндрическую пружину 1, вектор которого направлен вдоль осевой линии цилиндрической пружины 1 и равен Fo. При разложении момента Т по осевой линии витка цилиндрической пружины 1 и перпендикулярному ему направлению в поперечном сечении витка цилиндрической пружины 1 возникают крутящий Ткр=Tsinα и изгибающий Mиз=Tcosα моменты, где α - угол подъема витков. Так как угол α<10…12°, то изгибающий момент Миз значительно меньше крутящего, а поперечная сила F значительно меньше продольной Fo.
Продольная сила равна Fo=2T/D, где D - диаметр цилиндрической пружины. При увеличении силы Fr закручивания происходит принудительное перемещение витков вдоль осевой линии в сторону основания усеченного конусного штока 3, шаг цилиндрической пружины р2 уменьшается и витки замыкаются, образуя замкнутый цилиндр. Жесткость цилиндрической пружины 1, свитой из проволоки круглого поперечного сечения, равна [4]
где G - модуль упругости материала проволоки цилиндрической пружины. Для стали G=80000 МПа; d - диаметр проволоки; n - число рабочих витков. В этом случае деформация λ цилиндрической пружины 1 составит λ=Fo/спр. Жесткость одного витка цилиндрической пружины спр1=Gd/(8с3), где c=D/d - индекс пружины. Число рабочих витков цилиндрической пружины 1 составит n=спр1/сприв. При заданном значении угла φ, рад, закручивания цилиндрической пружины 1, требуемое число рабочих витков составит
n=φGJкр/πDT,
где Jкр - полярный момент инерции площади сечения витка при кручении.
Диаметр проволоки определяют при работе на кручение
 ,
,
где k - коэффициент влияния кривизны витков; [τ] - допускаемое напряжение при кручении витка. Значение коэффициента k принимают в зависимости от индекса пружины.
Шаг витков pi цилиндрической пружины 1 зависит pi=d+Δ, где Δ - зазор между витками. Чем больше зазор между витками, тем больше требуется осевая сила для замыкания витков.
При изменении осевой силы цилиндрической пружины 1 от Fo1 до Fo2 витки замыкаются и число рабочих витков будет равно единице, что соответствует замкнутому цилиндру. Тогда жесткость цилиндрической пружины 1 возрастает пропорционально числу рабочих витков. Если цилиндрическая пружина 1 имеет с одной стороны витки с большим шагом, чем с другой, то вначале замыкаются витки с мелким шагом р2, потом с большим р1. Шаг цилиндрической пружины р1 и р2 подбирают по нагрузочной характеристике транспортного средства и обеспечивает постоянную частоту собственных колебаний подрессоренной массы. При этом подвеска транспортного средства работает в режиме плавности хода при переменных нагрузках.
ЛИТЕРАТУРА
1. Гриченко И.В., Розов В.А., Лазарев В.В., Вольский Г.С. Колесные автомобили высокой проходимости. М.: Машиностроение, 1967.
2. Проектирование полноприводных колесных машин. Т.3, изд. МГТУ им. Н.Э.Баумана. 2008, с.328.
3. Расчет на прочность в машиностроении. Т.3, под ред. С.Д.Пономарева. М.: Машгиз, 1959, с.1114.
4. Гузенков П.Г. Детали машин. М.: Высшая школа. 1986. с.358.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2747143C1 |
| УСТРОЙСТВО ДЛЯ ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2747314C1 |
| УСТРОЙСТВО ДЛЯ ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2767377C1 |
| ТЕЛЕЖКА ПАССАЖИРСКОГО ВАГОНА | 2008 |
|
RU2376181C2 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2001 |
|
RU2274571C2 |
| ТОРСИОННАЯ ПРУЖИНА | 2013 |
|
RU2534288C1 |
| Гидроэластомерное упругодемпфирующее устройство системы подрессоривания транспортного средства | 2021 |
|
RU2767801C1 |
| УПРУГИЙ ЭЛЕМЕНТ | 2005 |
|
RU2291333C2 |
| ПРУЖИНА | 1973 |
|
SU367295A1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2354579C2 |
Изобретение относится к системам подрессоривания транспортных средств. Торсион содержит упругий элемент, выполненный в виде цилиндрической пружины кручения с переменным шагом витков. Пружина размещена в цилиндрическом корпусе. Внутрь цилиндрической пружины помещен усеченный конусный шток. Диаметр основания штока меньше внутреннего диаметра пружины. Один конец пружины присоединен к рычагу, а другой - к диску. Рычаг жестко связан с мостом транспортного средства. Диск жестко связан с несущей рамой транспортного средства. Одним концом усеченный конусный шток связан с рычагом, а вторым - свободно входит в отверстие в диске. Витки цилиндрической пружины с наименьшим шагом размещены на стороне диска, а с наибольшим - на стороне рычага. Достигается повышение плавности хода и устойчивость движения транспортного средства. 2 ил.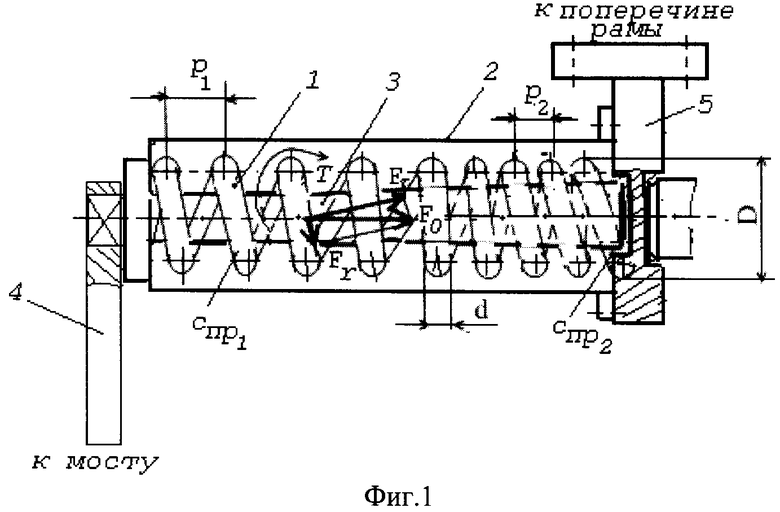
Торсион для подрессоривания транспортных средств, содержащий упругий элемент, отличающийся тем, что упругий элемент выполнен в виде цилиндрической пружины кручения с переменным шагом витков, которая размещена в цилиндрическом корпусе, а для обеспечения ее устойчивости при кручении в поперечном направлении внутрь цилиндрической пружины помещен усеченный конусный шток, диаметр основания которого меньше внутреннего диаметра пружины, один конец цилиндрической пружины присоединен к рычагу, жестко связанному с мостом транспортного средства, а другой - к диску, который, в свою очередь, также жестко связан с несущей рамой транспортного средства, рычаг также жестко связан с одним концом усеченного конусного штока, другой конец которого входит свободно в отверстие в диске, причем витки цилиндрической пружины с наименьшим шагом размещены на стороне диска, а с наибольшим - на стороне рычага.
| Автомат для сборки сердечников магнитопроводов | 1972 |
|
SU445931A1 |
| Способ закрепления монтажных жгутов | 1972 |
|
SU459871A1 |
| SU 1295074 A2, 07.03.1987 | |||
| Торсион | 1985 |
|
SU1295073A1 |

