Изобретение относится к транспортным устройствам, автономно работающим внутри трубопроводных обвязок компрессорных станций (ТПО КС) для контроля внутреннего состояния труб, например с помощью телевизионной камеры.
Известен телеуправляемый диагностический комплекс (ТДК) ЗАО КТПИ Газпроект, содержащий самодвижущуюся платформу с электродвигателями, на которой установлены три гусеницы, расположенные под примерно равными углами в плоскости, перпендикулярной продольной оси трубы. Принудительный контакт гусениц с внутренней поверхностью трубы осуществляется разведением системы шарниров.
Недостатком данного устройства является большое трение качения между гусеницами и поверхностью трубы, особенно при прохождении участков изгиба трубопровода, и значительный вес платформы. Это требует повышенной мощности приводных электродвигателей и, как следствие, повышенного расхода электроэнергии. Кроме того, в связи с большой шероховатостью внутренней поверхности трубы траки гусениц подвергаются большому износу и требуют периодической замены.
Задачей изобретения является улучшение эксплуатационных качеств устройства за счет гибкости и легкости конструкции, уменьшения трения при передвижении его по трубопроводу.
Поставленная задача решается автономным внутритрубным транспортным устройством, содержащим два идентичных по конструкции оконечных модуля, каждый из которых состоит из вертикальной панели с шарнирно закрепленными на ней и равномерно расположенными как минимум тремя поперечными электроактуаторами, на корпусах которых закреплены свободновращающиеся опорные колеса с возможностью их передвижения по внутренней поверхности трубопровода, и расположенный между ними средний модуль, включающий две торцевые панели, между которыми жестко закреплены продольный электроактуатор, расположенный по продольной оси устройства, и как минимум две телескопические направляющие, причем средний модуль соединен с каждым оконечным модулем посредством подпружиненного шарнира Гука, одна ось которого крепится на торцевой панели среднего модуля, а другая ось - на вертикальной панели соответствующего оконечного модуля, причем пружина, охватывающая шарнир Гука, одним концом упирается в торцевую панель среднего модуля, а другая концом - в упорную шайбу, установленную на оси шарнира Гука, соединенной с вертикальной панелью соответствующего оконечного модуля.
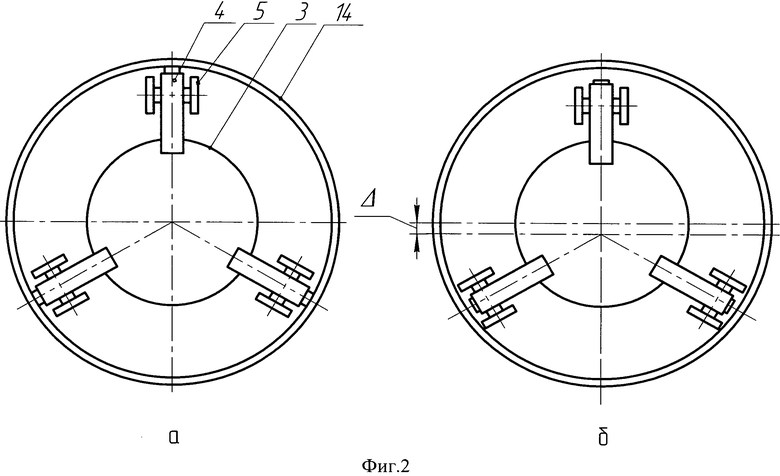
Сущность изобретения поясняется чертежами, где на фиг.1 представлен общий вид устройства, размещенного в трубопроводе, на фиг.2 - вид устройства с торца: а) в заклиненном состоянии колес, б) в расклиненном состоянии колес.
Автономное внутритрубное транспортное устройство (фиг.1) содержит два идентичных по конструкции оконечных модуля 1 и расположенный между ними один средний модуль 2. Каждый из оконечных модулей состоит из вертикальной панели 3 с шарнирно установленными на ней как минимум тремя поперечными электроактуаторами 4, расположенными в плоскости, перпендикулярной продольной оси устройства, на корпусах которых жестко закреплены свободновращающиеся опорные колеса 5. Электроактуаторы 4 при необходимости могут быть переведены в положение вдоль продольной оси устройства (показано пунктирными линиями). Средний модуль 2 содержит две торцевые панели 6 и 7, между которыми жестко закреплены продольный электроактуатор 8, расположенный по продольной оси устройства, и как минимум две телескопические направляющие 9. Средний модуль соединен с оконечными модулями посредством шарниров Гука 10, которые охвачены пружинами 11. Один конец каждой пружины упирается в соответствующую торцевую панель 6 или 7 среднего модуля, а другой - в упорные шайбы 12, установленные на осях 13 шарниров Гука, жестко соединенных с торцевыми панелями 3 соответствующих оконечных модулей. Устройство размещено внутри трубопровода 14.
Автономное внутритрубное транспортное устройство работает следующим образом.
Перед вводом устройства в трубопровод 14 поперечные электроактуаторы 4 складываются и фиксируются в положении вдоль продольной оси устройства. Затем через боковой люк-лаз устройство размещают в трубопроводе, опираясь на внутреннюю поверхность трубы опорными колесами 5 сложенных электроактуаторов 4. Затем электроактуаторы переводятся в рабочее поперечное положение. При этом штоки электроактуаторов втянуты, и устройство опирается на внутреннюю поверхность трубопровода 14 опорными колесами 5.
Перед началом движения по команде процессора (не показан) выдвигаются штоки поперечных электроактуаторов 4 крайних модулей 1. Модули расклиниваются в трубопроводе, а опорные колеса 5 выходят из соприкосновения с внутренней поверхностью трубопровода (фиг.2а). По команде оператора процессор определяет направление движения устройства и соответственно определяет для данного направления «передний» и «задний» оконечные модули. Далее по сигналам процессора происходит следующая последовательность действий:
1) втянуть штоки поперечных электроактуаторов оконечного «переднего» модуля, при этом модуль встает на опорные колеса 5, опускаясь на величину Δ относительно продольной оси трубопровода (фиг.2б);
2) выдвинуть шток продольного электроактуатора 8 среднего модуля на заданную величину, при этом оконечный «передний» модуль передвигается вперед на эту же величину;
3) выдвинуть штоки поперечных электроактуаторов «переднего» оконечного модуля, при этом опорные колеса выходят из контакта с внутренней поверхностью трубопровода, «передний» модуль расклинен (фиг.2а);
4) втянуть штоки поперечных электроактуаторов «заднего» оконечного модуля, при этом «задний» модуль встает на опорные колеса 5 (фиг.2б);
5) втянуть шток продольного электроактуатора 8 на заданную величину, при этом задний оконечный модуль продвинется вперед на эту же величину;
6) выдвинуть штоки поперечных электроактуаторов «заднего» оконечного модуля, при этом опорные колеса 5 выходят из контакта с трубопроводом, «задний» модуль расклинен (фиг.2а).
Далее цикл повторяется, и таким образом осуществляется пошаговое перемещение устройства по трубопроводу. Устройство движется до команды оператора - «стоп». При команде «назад» циклы осуществляются в обратной последовательности.
Подпружиненные шарниры Гука 10 поддерживают все три модуля на горизонтальных участках трубопровода на одной оси и в то же время не препятствуют изгибу устройства при прохождении им участков поворота трубопровода. Устройство обеспечивает прохождение уклонов трубопровода в диапазоне: +90°÷0÷-90°.
Таким образом, предложенное изобретение позволяет улучшить эксплуатационные качества внутритрубного транспортного устройства за счет гибкости и легкости конструкции, уменьшения трения при его движении по трубопроводу.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2015 |
|
RU2576746C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ КРОУЛЕР (ВАРИАНТЫ) | 2010 |
|
RU2452889C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ КРОУЛЕР | 2012 |
|
RU2482375C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2347974C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ БОЕВЫХ МАШИН (ВАРИАНТЫ) | 2010 |
|
RU2431109C1 |
| Гироскопический преобразователь энергии морских волн | 2018 |
|
RU2688857C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| Гироскопическое устройство | 2016 |
|
RU2626312C1 |
Изобретение относится к транспортным устройствам, автономно работающим внутри трубопроводов для контроля внутреннего состояния труб, например с помощью телевизионной камеры. Устройство содержит два идентичных по конструкции оконечных модуля. Каждый модуль состоит из вертикальной панели с шарнирно закрепленными на ней и равномерно расположенными как минимум тремя поперечными электроактуаторами, на корпусах которых закреплены свободновращающиеся опорные колеса с возможностью их передвижения по внутренней поверхности трубопровода. Между оконечными модулями расположен средний модуль, включающий две торцевые панели, между которыми жестко закреплены продольный электроактуатор и как минимум две телескопические направляющие. Средний модуль соединен с каждым оконечным модулем посредством подпружиненного шарнира Гука, одна ось которого крепится на торцевой панели среднего модуля, а другая ось - на вертикальной панели соответствующего оконечного модуля. Пружина, охватывающая шарнир Гука, одним концом упирается в торцевую панель среднего модуля, а другим концом - в упорную шайбу, установленную на оси шарнира Гука, соединенной с вертикальной панелью соответствующего оконечного модуля. Изобретение позволяет улучшить эксплуатационные качества внутритрубного транспортного устройства за счет гибкости и легкости конструкции, уменьшения трения при его движении по трубопроводу. 2 ил.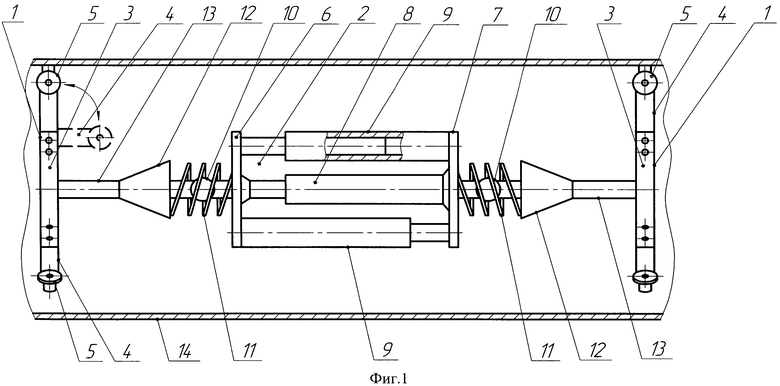
Автономное внутритрубное транспортное устройство, содержащее два идентичных по конструкции оконечных модуля, каждый из которых состоит из вертикальной панели с шарнирно закрепленными на ней и равномерно расположенными как минимум тремя поперечными электроактуаторами, на корпусах которых закреплены свободновращающиеся опорные колеса с возможностью их передвижения по внутренней поверхности трубопровода, и расположенный между ними средний модуль, включающий две торцевые панели, между которыми жестко закреплены продольный электроактуатор, расположенный по продольной оси устройства, и как минимум две телескопические направляющие, причем средний модуль соединен с каждым оконечным модулем посредством подпружиненного шарнира Гука, одна ось которого крепится на торцевой панели среднего модуля, а другая ось - на вертикальной панели соответствующего оконечного модуля, причем пружина, охватывающая шарнир Гука, одним концом упирается в торцевую панель среднего модуля, а другая концом - в упорную шайбу, установленную на оси шарнира Гука, соединенной с вертикальной панелью соответствующего оконечного модуля.
| Роликовая втулка | 1923 |
|
SU2969A1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| Внутритрубное шагающее транспортное средство | 1989 |
|
SU1710430A1 |
| Способ получения волокнистой основы для искусственной кожи | 1971 |
|
SU484701A3 |
| Способ диагностики степени тяжести гиперандрогении | 2016 |
|
RU2638813C2 |
| АВТОМАТИЧЕСКИЙ ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1935 |
|
SU46986A1 |

