Изобретение относится к транспортным устройствам, автономно работающим внутри трубопроводных обвязок компрессорных станций (ТПОКС) для контроля внутреннего состояния труб, например с помощью телевизионной камеры.
Известно автономное внутритрубное транспортное устройство (RU №2509255, МПК F16L 55/34, опубл. 10.03.2014 г.), состоящее из двух идентичных оконечных модулей, соединенных со средним модулем, осуществляющим возвратно-поступательные движения посредством горизонтального электроцилиндра. Каждый оконечный модуль состоит из вертикальной панели с прикрепленными как минимум тремя радиальными электроцилиндрами, на корпусах которых закреплены свободно вращающиеся опорные колеса. Вертикальные панели оконечных модулей соединены со средним модулем посредством подпружиненных шарниров Гука.
Недостатком данного устройства является трудность достижения сочетания оптимальных значений жесткости и гибкости пружин в шарнирно-подпружиненных узлах, а также невозможность задавать необходимую ориентацию панели радиальных электроцилиндров при прохождении участков трубопроводов с горизонтальными боковыми отводами.
Задачей изобретения является улучшение эксплуатационных качеств устройства за счет обеспечения необходимого позиционирования радиальных электроцилиндров с закрепленными на них опорными колесами при прохождении участков трубопровода с боковыми отводами.
Поставленная задача решается автономным внутритрубным транспортным устройством, содержащим два идентичных оконечных модуля, каждый из которых состоит из двух вертикальных панелей с закрепленными между ними посредством шаровых опор как минимум тремя равномерно расположенными продольными электроцилиндрами, образующими поворотно-шаговый механизм, и расположенный между оконечными модулями средний модуль, жестко, соосно скрепленный с оконечными, причем к наружным панелям оконечных модулей соосно прикреплены поворотные механизмы, на выходных валах которых закреплены опорно-распорные блоки, включающие основания с равномерно расположенными на них как минимум тремя радиальными электроцилиндрами, установленными с возможностью вращения в направлении, перпендикулярном продольной оси устройства, с закрепленными на них свободно вращающимися опорными сферическими колесами.
Изобретение позволяет улучшить эксплуатационные качества устройства за счет применения поворотно-шаговых механизмов и возможности поворота опорно-распорных блоков с необходимостью позиционирования радиальных электроцилиндров при прохождении боковых отводов трубопровода.
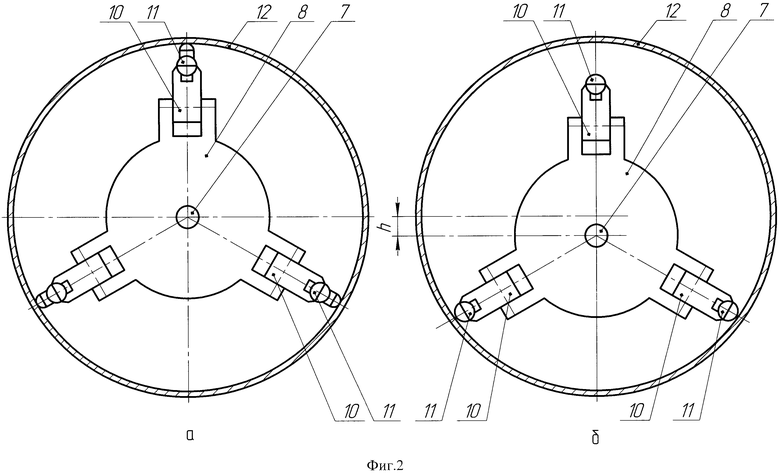
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен общий вид устройства, размещенного в трубопроводе, на фиг. 2 - вид устройства с торца: а) в заклиненном состоянии радиальных электроцилиндров; б) в расклиненном состоянии электроцилиндров - устройство опирается на опорные сферические колеса.
Автономное внутритрубное транспортное устройство (фиг. 1) содержит два идентичных оконечных модуля 1 и расположенный между ними один средний модуль 2. Каждый из оконечных модулей состоит из двух вертикальных панелей 3 с установленными между ними через равные углы и на одинаковом расстоянии от продольной оси как минимум трех горизонтальных электроцилиндров 4, прикрепленных к вертикальным панелям 3 шаровыми шарнирами 5, с образованием поворотно-шагового механизма. К внешним вертикальным панелям оконечных модулей 1 соосно прикреплены поворотные механизмы 6 с выходными валами 7. К выходным валам 7 поворотных механизмов жестко прикреплены передний и задний опорно-распорные блоки, включающие основания 8 с равномерно расположенными на них на равных расстояниях от продольной оси и на равных угловых расстояниях между собой, закрепленными на шарнирах 9, радиальными электроцилиндрами 10 в количестве не менее трех. К корпусам электроцилиндров 10 закреплены свободно вращающиеся сферические колеса 11. Автономное внутритрубное транспортное устройство размещено внутри трубы 12. Радиальные электроцилиндры 10, вращаясь на шарнирах 9, могут занимать два фиксированных положения - рабочее (перпендикулярное оси трубы) и транспортное (горизонтальное) - показано пунктиром.
Автономное внутритрубное транспортное устройство работает следующим образом.
При вводе устройства в трубу 12 радиальные электроцилиндры 10 переводятся в рабочее положение. При этом штоки электроцилиндров втянуты, и устройство опирается на внутреннюю поверхность трубы 12 опорными колесами 11. Перед началом движения по команде оператора выдвигаются штоки радиальных электроцилиндров 10 опорно-распорных блоков. Устройство расклинивается в трубе 12, а опорные колеса 11 выходят из соприкосновения с внутренней поверхностью трубопровода 12 (фиг. 2,а). По команде оператора процессор (не показан) определяет направление движения устройства и, соответственно, определяет для данного направления «передний» и «задний» оконечные модули. Далее по командам процессора происходят следующие действия:
I. Движение по горизонтальному участку
1. Втянуть штоки радиальных электроцилиндров 10 «переднего» опорно-распорного блока, при этом устройство встает на опорные колеса 11, опускаясь на величину «h» относительно продольной оси трубопровода (фиг. 2,б).
2. Выдвинуть штоки продольных электроцилиндров 4 «переднего» модуля на одинаковые заданные величины и одновременно выдвинуть на такую же величину штоки продольных электроцилиндров «заднего» расклиненного модуля.
3. Выдвинуть штоки радиальных электроцилиндров «переднего» опорно-распорного блока, происходит его расклинивание.
4. Втянуть штоки радиальных электроцилиндров «заднего» опорно-распорного блока.
5. Втянуть штоки продольных электроцилиндров «переднего» и «заднего» модулей на одинаковую заданную величину.
6. Выдвинуть штоки продольных электроцилиндров «заднего» модуля.
Далее цикл повторяется, и таким образом осуществляется пошаговое перемещение устройства. При команде «назад» циклы осуществляются в обратной последовательности.
II. Движение по вертикальному участку
1. Втянуть штоки радиальных электроцилиндров 10 «переднего» опорно-распорного блока.
2. Выдвинуть штоки продольных электроцилиндров 4 «переднего» модуля на одинаковые заданные величины и одновременно выдвинуть на такую же величину штоки продольных электроцилиндров «заднего» расклиненного модуля.
3. Выдвинуть штоки радиальных электроцилиндров «переднего» опорно-распорного блока, происходит его расклинивание.
4. Втянуть штоки радиальных электроцилиндров «заднего» опорно-распорного блока.
5. Втянуть штоки продольных электроцилиндров «переднего» и «заднего» модулей на одинаковую заданную величину.
6. Выдвинуть штоки продольных электроцилиндров «заднего» модуля.
III. Движение по участкам трубопровода с боковыми ответвлениями
Происходит аналогично движению по горизонтали, но при подходе к участку трубопровода с боковыми ответвлениями перед расклиниванием оконечных модулей, путем задействования соответствующих поворотных механизмов 6, осуществляется необходимое позиционирование радиальных электроцилиндров 10, с целью пропуска боковых отводов между радиальными электроцилиндрами.
IV. Движение по радиусным участкам трубопроводов (горизонтальным и вертикальным) происходит аналогично движению на горизонтальном участке, но при достижении «передним» модулем радиусного участка процессор дает команды на следующие действия:
V. 1. Втянуть штоки радиальных электроцилиндров «переднего» модуля.
2. Выдвинуть штоки продольных электроцилиндров «переднего» модуля на заданные величины, что обеспечивает необходимый поворот «переднего» опорно-распорного блока для прохождения радиуса трубопровода.
Дальнейшее движение происходит аналогично движению по горизонтали (I).
При достижении радиусного участка «задним» модулем процессор дает команды на следующие действия:
1. Втянуть штоки радиальных электроцилиндров «заднего» модуля.
2. Выдвинуть штоки продольных электроцилиндров «заднего» модуля на заданные величины, что обеспечивает необходимый поворот «заднего» опорно-распорного блока для прохождения радиуса трубопровода.
Дальнейшее движение происходит аналогично движению по горизонтали (I).
При выходе устройства из радиусного участка трубопровода процессор подает команды сначала на «передний» модуль, обеспечивая поворот «переднего» опорно-распорного блока в положение, обеспечивающее движение по горизонтальному участку (I). Затем процессор подает команды на «задний» модуль, обеспечивая поворот «заднего» опорно-распорного блока для движения по горизонтальному участку (I).
Таким образом, предложенное изобретение позволяет улучшить эксплуатационные качества автономного внутритрубного транспортного устройства за счет применения поворотно-шаговых механизмов и возможности поворота опорно-распорных блоков с необходимостью позиционирования радиальных электроцилиндров при прохождении боковых отводов трубопровода.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2012 |
|
RU2509255C1 |
| Гироскопическое устройство | 2016 |
|
RU2626312C1 |
| МОБИЛЬНЫЙ РОБОТ С МАГНИТНЫМИ ДВИЖИТЕЛЯМИ | 2014 |
|
RU2585396C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ КРОУЛЕР | 2012 |
|
RU2482375C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ КРОУЛЕР (ВАРИАНТЫ) | 2010 |
|
RU2452889C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ ВНУТРИТРУБНЫЙ ИНТРОСКОП | 2017 |
|
RU2675422C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2347974C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
Изобретение относится к транспортным устройствам, автономно работающим внутри трубопроводных обвязок компрессорных станций для контроля внутреннего состояния труб, например с помощью телевизионной камеры. Устройство содержит два идентичных оконечных модуля и расположенный между ними средний модуль. Каждый оконечный модуль состоит из двух вертикальных панелей с закрепленными между ними посредством шаровых опор тремя равномерно расположенными продольными электроцилиндрами, образующими поворотно-шаговый механизм. К наружным панелям оконечных модулей соосно прикреплены поворотные механизмы. На выходных валах поворотных механизмов закреплены опорно-распорные блоки, включающие основания с равномерно расположенными на них тремя радиальными электроцилиндрами, установленными с возможностью вращения в направлении, перпендикулярном продольной оси устройства. К радиальным электроцилиндрам закреплены свободно вращающиеся опорные сферические колеса. Изобретение позволяет улучшить эксплуатационные качества устройства за счет применения поворотно-шаговых механизмов и поворота опорно-распорных блоков для позиционирования радиальных электроцилиндров при прохождении боковых отводов трубопровода. 2 ил.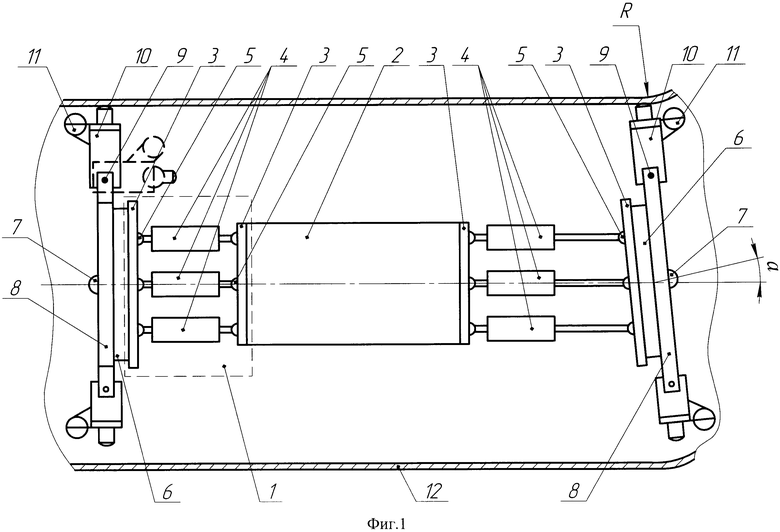
Автономное внутритрубное транспортное устройство, содержащее два идентичных оконечных модуля, каждый из которых состоит из двух вертикальных панелей с закрепленными между ними посредством шаровых опор как минимум тремя равномерно расположенными продольными электроцилиндрами, образующими поворотно-шаговый механизм, и расположенный между оконечными модулями средний модуль, жестко, соосно скрепленный с оконечными, причем к наружным панелям оконечных модулей соосно прикреплены поворотные механизмы, на выходных валах которых закреплены опорно-распорные блоки, включающие основания с равномерно расположенными на них как минимум тремя радиальными электроцилиндрами, установленными с возможностью вращения в направлении, перпендикулярном продольной оси устройства, с закрепленными на них свободно вращающимися опорными сферическими колесами.
| АВТОНОМНОЕ ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2012 |
|
RU2509255C1 |
| CN 203671142 U, 25.06.2014 | |||
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2005 |
|
RU2300046C1 |
| Внутритрубное шагающее транспортное средство | 1989 |
|
SU1710430A1 |
| АВТОМАТИЧЕСКИЙ ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1935 |
|
SU46986A1 |
| Способ диагностики степени тяжести гиперандрогении | 2016 |
|
RU2638813C2 |

