Изобретение относится к транспортным средствам, способным перемещаться внутри трубопроводов, и может использоваться качестве опорного конструктивного элемента транспортного модуля внутритрубного автономного диагностического робота для проведения видеодиагностики, неразрушающего контроля состояния как магистральных, так и промысловых и технологических трубопроводов, для которых характерны значительные перепады диаметров труб, локальные изменения направления в вертикальной и горизонтальной плоскостях, а также ответвления трубопровода при разделении потока транспортируемого продукта.
В настоящее время для внутритрубной диагностики используются как традиционные внутритрубные снаряды-дефектоскопы, так и автономные роботизированные сканеры-дефектоскопы. Внутритрубные снаряды движутся в трубе под действием потока газа. Такие устройства могут быть использованы только на действующих магистральных газопроводах. В качестве автономного роботизированного диагностического устройства, предназначенного для работы внутри как магистральных, так и промысловых и технологических трубопроводов известно, например, мобильное «Транспортное средство для перемещения робота в трубопроводах сложной конфигурации» по патенту ПМ170056 (2016), содержащее основание с установленными на нем электродвигателем, тремя расположенными относительно друг друга под углом 120° колесными парами, механизмом передачи движения от электродвигателя на движитель с протектором и механизмом поджатая колес к поверхности трубопровода, причем, движитель выполнен в виде ремня, изготовленного с протектором на внешней, касающейся при работе устройства трубопровода стороне и зубчатым профилем, соответствующим профилю зубчатого венца ведущего колеса на внутренней стороне, которое совместно с редуктором представляет собой механизм передачи движения от электродвигателя на движитель. Для промысловых и технологических трубопроводов характерны значительные до 150% перепады диаметров труб, локальные изменения направления вплоть до 180°, а также ответвления (тройники) трубопровода при разделении потока транспортируемого продукта. Эти конструктивные особенности реализуются с помощью стандартизированных соединительных трубопроводных элементов, соответственно, переходов, крутоизогнутых отводов и тройников. Недостатком описанного выше технического решения является относительно низкая маневренность при наличии препятствий, продолжительных наклонных в вертикальной плоскости участков трубопроводов, при прохождении описанных соединительных элементов, особенно крутоизогнутых отводов с радиусом поворота от одного 1 до полутора 1,5 внутренних диаметров трубы и равнопроходных тройников, а также относительно низкая точность сохранения соосности относительно оси трубопровода, что существенным образом влияет на точность диагностики большого числа методов измерений.
Известна также «Роботизированная платформа для внутритрубной диагностики» ПМ194854 (2019), содержащая первое и второе несущие основания, каждое из которых содержит расположенные под углом 120° три опорные ноги с независимыми приводами с колесами с независимыми приводами, при этом первое и второе несущие основания жестко крепятся с помощью соединительных фланцев к корпусу полноповоротного диагностического модуля на его противоположных сторонах, который предназначен для установки контрольно-инструментальных диагностических средств. Каждая из шести опорных ног с приводными колесами на конце представляет собой направленный вдоль оси трубы рычаг, своим основанием установленный на независимом вращательном шарнире поворота рычага, обеспечивающем качание рычага ноги в радиальной плоскости трубы. Соответственно, ось шарнира направлена по касательной к окружности сечения трубы, а сами шарниры установлены на несущих основаниях. Такая кинематическая схема платформы с качающимися рычагами ног позволяет преодолевать переходы, когда требуется двигаться по трубе с конусной внутренней поверхностью за счет изменения угла наклона рычагов к оси трубы. Так, при движении внутри трубы с минимально возможным диаметром, рычаги практически вытянуты вдоль оси трубы и имеют наибольший угол наклона к оси при движении в трубе с максимальным возможным диаметром, а при движении в конусном переходе с изменением диаметра три независимых шарнира поворота рычагов должны согласованно изменять углы наклона трех рычагов опорных ног последовательно на каждом несущем основании.
Основным недостатком этого аналога является сложность преодоления крутоизогнутых отводов с углом поворота 90° и более, особенно для труб с минимально возможным малым диаметром по условию прохождения перехода. Это связано с достаточно большой длиной роботизированной платформы с вытянутыми ногами.
В то же время прохождение поворотов данной платформой сопряжено с существенными трудностями, так как при поворотах внешние по отношению к центру поворота колеса должны проходить большие пути и, соответственно, вращаться с большей скоростью, чем внутренние, при этом для соблюдения кинематических условий прохождения жесткой конструкции в криволинейной трубе все колеса будут катиться только с проскальзыванием, что также требует дополнительных паразитных затрат энергии. Частично проблему поворота можно облегчить за счет изменения углов наклона рычагов внутренних и внешних по отношению к центру поворота колес, что приводит к заметному отклонению оси робота от оси трубы и не исключает полностью явления проскальзывания колес. Особенно это сказывается при поворотах с малыми радиусами и затрудняет и даже делает невозможным проведение диагностики путем вращения диагностического модуля вокруг центральной части робота.
Эти проблемы решены в «Транспортном модуле внутритрубного диагностического робота» по патенту RU 2802493 (2022), принятому за прототип.
Транспортный модуль внутритрубного диагностического робота содержит первое и второе несущие основания, содержащие установленные под углом 120° три опорные ноги с независимыми приводными колесными движителями. Основания соединены на противоположных сторонах с предназначенным для установки бортовой аппаратуры центральным корпусом с помощью двухосевых шарниров. При движении в прямолинейных участках трубы повороты шарниров блокируются, а при прохождении поворотов отводов обеспечиваются согласованные повороты шарниров независимо вокруг каждой пары параллельных осей степеней подвижности шарниров, например, при прохождении поворотов в горизонтальной плоскости и поворотов для подъема или спуска в вертикальной плоскости. Часть бортовой аппаратуры выносится за пределы центрального корпуса и устанавливается на одном или обоих несущих основаниях. Опорные ноги устанавливаются радиально и состоят из неподвижного корпуса и подвижной секции с установленным на ней колесным движителем, а подвижная секция опоры телескопически выдвигается или втягивается с помощью своего независимого электропривода с винтовым механизмом.
Такая кинематическая схема транспортного модуля обеспечивает прохождение поворотов в горизонтальной плоскости за счет свободных поворотов разблокированных (расторможенных) шарниров с вертикальными осями и регулирования скоростей вращения ближних и дальних по отношению к центру поворота опорных колес.
При прохождении же поворотов в вертикальной плоскости после разблокирования шарниров с горизонтальными осями возможно возникновение неконтролируемого «излома» продольной оси транспортного модуля в вертикальной плоскости, что может быть вызвано недостаточно точной балансировкой транспортного модуля. Балансировка в данном случае предполагает такое распределение собственных масс опорных оснований и центрального корпуса вместе с массами установленного на них «собственного» функционального оборудования, обеспечивающего движение транспортного модуля и диагностического оборудования, чтобы установленный горизонтально транспортный модуль с заблокированными шарнирами с прямой продольной осью после разблокировки шарниров с вертикальными осями остался неподвижным и сохранил продольную ось прямой. Такая балансировка достигается в результате выполнения сложного комплекса мероприятий, во-первых, при проектировании соответствующей скрупулезной «развесовкой» всей конструкции диагностического робота с возможным и даже обязательным добавлением «паразитных» балластных грузов, и, во-вторых, при сборке и отладке робота в сборе путем уточнения масс балластных грузов и мест их размещения. Очевидно, что необходимость использования балластных грузов увеличивает собственный вес диагностического робота, нагрузку на колеса, нагрузку на приводы колес и приводы выдвижения опорных ног и повышает расход энергии автономных аккумуляторных батарей, что приведет к сокращению времени автономной работы диагностического робота внутри трубы, сократит длину продиагностированного участка трубы (на одной зарядке батарей), что увеличит число проходов и время диагностики запланированного участка трубы и в конечном счете увеличит время простоя трубопровода и напрямую связанные с этим значительные финансовые потери эксплуатантов.
Важно отметить, что данная схема (в состоянии с разблокированными шарнирами) является статически неустойчивой и чувствительна к неуравновешенности масс, но тем не менее обладает некоторым ресурсом динамической компенсации неуравновешенных моментов, вызванных относительно небольшой разбалансировкой масс, за счет соответствующего управления скоростями вращения верхних и нижних опорных приводных колес, которое позволяет создавать необходимые компенсирующие крутящие моменты вокруг горизонтальных осей, приложенные к основаниям в комбинации с работой блокирующих шарниры тормозов.
В то же время, при прохождении препятствий, например, кольцевых сварочных швов высотой до 15-20 мм, идущих с шагом последовательно подваренных труб (обычно длиной до 10-12 м), о наличии которых сигнализирует затруднение вращения колес, о котором судят по возрастанию потребления тока двигателей, необходимо втягивать колеса за счет работы радиально направленного линейного винтового привода опоры колеса. Как показывает практика, такой контур управления не обладает достаточным быстродействием и точностью и требует снижения скорости движения робота. Еще большие трудности возникают при наезде одним колесом на случайное препятствие, например, на локальный участок с битумным отложением, на междушовном промежутке трубы.
Задачами предлагаемого изобретения являются:
- придание статической устойчивости кинематической схеме транспортного модуля диагностического робота,
- снижение нагрузки на опорное колесо и улучшение его сцепления с внутренней поверхностью трубы,
- исключение использования балансировочных грузов и упрощение процедуры балансировки распределения масс диагностического робота,
- упрощение преодоления препятствий,
- повышение энергоэффективности робота.
Задача придания статической устойчивости кинематической схеме диагностического робота решается за счет изменения кинематической схемы опоры транспортного модуля путем увеличения продольной линии опирания на трубу движителя опорной ноги, осуществляемое установкой двух приводных колес (мотор-колес), каждое на своем шарнирном подпружиненном рычаге, которые направлены вдоль продольной оси транспортного модуля вперед и назад от направленной радиально оси опорной ноги. Очевидно, что для статической устойчивости транспортного модуля робота с разблокированными шарнирами в пределах упругого хода пружин рычагов колес достаточно попадания вектора силы веса центра масс оснований с учетом веса центральной части в существенно увеличенную зону площади опирания, образованную передними и задними колесами нижних опорных ног по сравнению с прототипом, у которого зоной устойчивости является узкая полоса по линии соединения контактных пятен колес нижних опор.
Задача снижения нагрузки на колесо и улучшение его сцепления с внутренней поверхностью трубы решается за счет двухколесного опирания ног транспортного модуля робота, придания шине колеса тороидальной формы с протектором и с контактной поверхностью, радиус которой меньше внутреннего радиуса трубы, при этом шины изготовлены из материала с высоким коэффициентом трения.
Задача исключения использования при балансировке робота навешивания «паразитных» балластных грузов и упрощение процедуры балансировки решается за счет того, что на каждой опорной ноге каждое из двух приводных мотор-колес установлено на конце своего рычага, который вторым концом с помощью цилиндрического шарнира установлен на подвижной секции и подпружинен относительно нее с помощью двух одинаковых пружин сжатия, симметрично расположенных относительно оси рычага, причем ось цилиндрического шарнира направлена перпендикулярно продольной оси робота, а в конструкцию опорной ноги заложены следующие возможности:
- Изменение длины каждого рычага,
- Изменение положения точки крепления каждой пары пружин на своем рычаге,
- Изменение величины начального поджатия каждой пружины, а также установлены ограничители сжатия пружин.
При этом каждый рычаг выполнен в виде двухсекционной телескопической стрелы, неподвижная секция которой – гильза связана шарниром с подвижной секцией опоры ноги, а в гильзе установлена подвижная секция – шток, на котором в требуемом положении устанавливаются и закрепляются установочные планки с пружинами, а на конце штока устанавливается мотор колесо.
Дополнительно к этому на каждой опоре установлены:
- датчик, контролирующий перемещение подвижной секции относительно неподвижного корпуса опоры,
- датчики поворотов рычагов и
- датчики суммарного усилия сжатия двух пружин на каждом рычаге.
При такой конструкции опорной ноги балансировка заключается в:
- проектировочной «развесовке» - распределении масс оборудования робота, выборе длин рычагов, выборе характеристик пружин, определении мест их установки на рычагах и
- отладочной «точной» настройке длин рычагов, мест установки пружин и их начального поджатия для всех опорных ног диагностического робота в сборе со всем оборудованием, который устанавливается горизонтально на технологическом стапеле, добиваясь при этом горизонтальности и прямолинейности оси робота, составленной из осей оснований и центральной части транспортного модуля.
Такая процедура балансировки позволяет нивелировать неизбежные ошибки между значениями масс и координатами центров масс составных частей робота, используемых в расчетах, и их реальными значениями, а наличие расчетной модели робота позволяет облегчить балансировку, так как заранее может быть определена «чувствительность объекта» к изменению параметров балансировки.
Таким образом, исключено использование балансировочных грузов, а также можно говорить о том, что колесная опора транспортного модуля приобретает качество адаптивности к неточностям описания конкретного проектного исполнения внутритрубного диагностического робота и обеспечивает балансировку транспортного модуля даже, например, при смене диагностического оборудования или смене типа и/или количества аккумуляторных батарей в процессе эксплуатации робота, что расширяет его функциональные возможности.
Задача облегчения преодоления препятствий решается путем построения петли управления приводом втягивания или выдвижения подвижной части с колесами относительно неподвижного корпуса опорной ноги на основе показаний датчика отклонения рычага с приводным колесом, датчиков усилия сжатия пружин и датчиков тока двигателей мотор-колес, причем для анализа и выработки команд управления могут быть использованы показания датчиков всех опорных ног транспортного модуля.
Задача повышения энергоэффективности транспортного модуля решается за счет исключения «паразитного» веса балансировочных грузов и, соответственно, исключения дополнительных затрат энергии на перемещение дополнительного (к проектировочному) веса робота, а также исключения затрат на «динамическую» балансировку робота за счет дополнительной работы приводов колес.
Сущность изобретения поясняется следующими рисунками и чертежами.
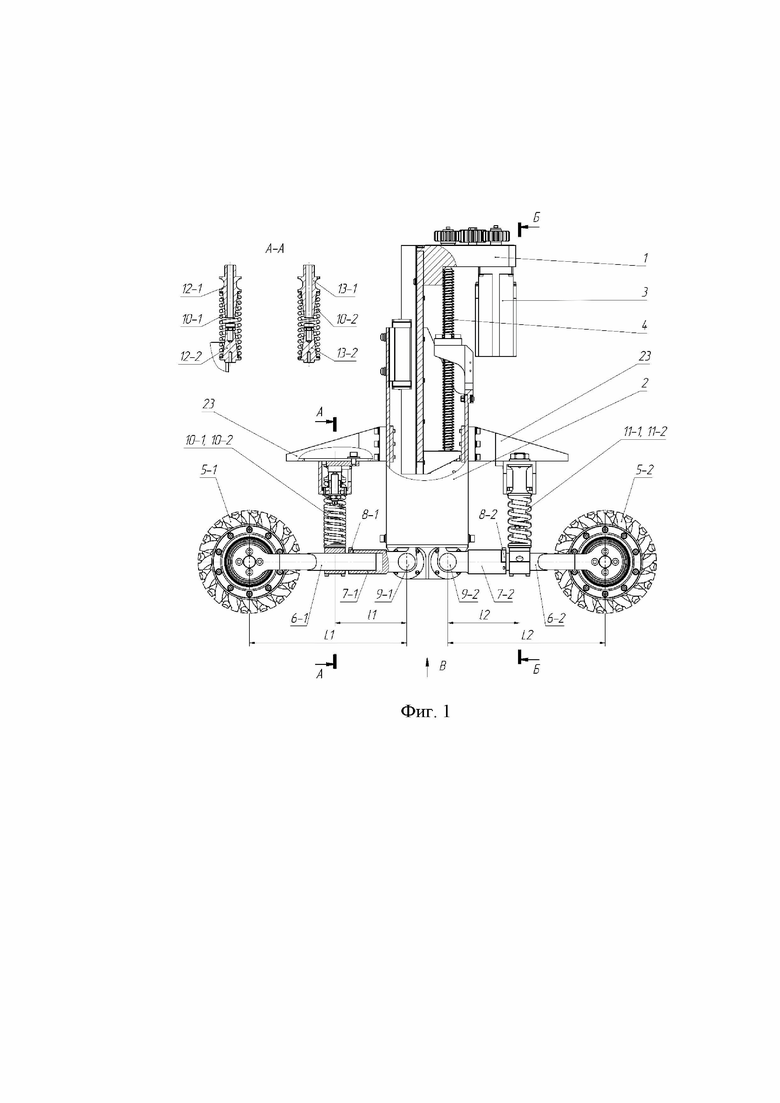
На фиг. 1 показана адаптивная колесная опора транспортного модуля, вид сбоку.
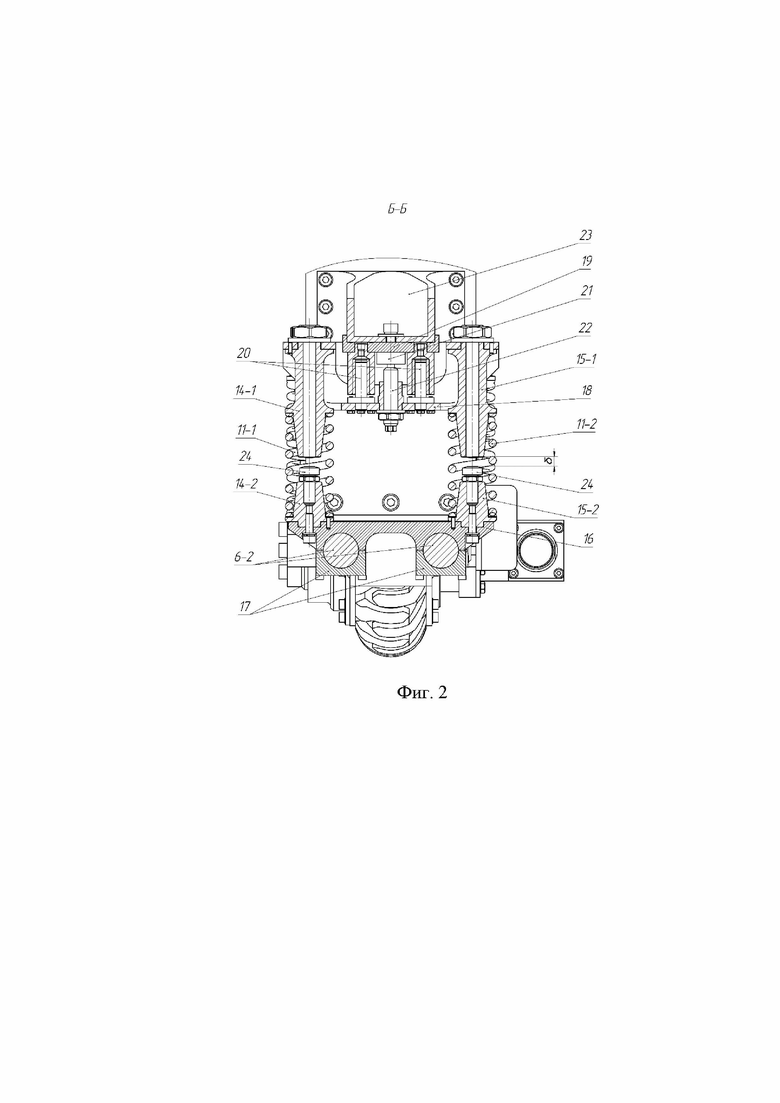
На фиг. 2 показано сечение Б-Б колесной опоры.
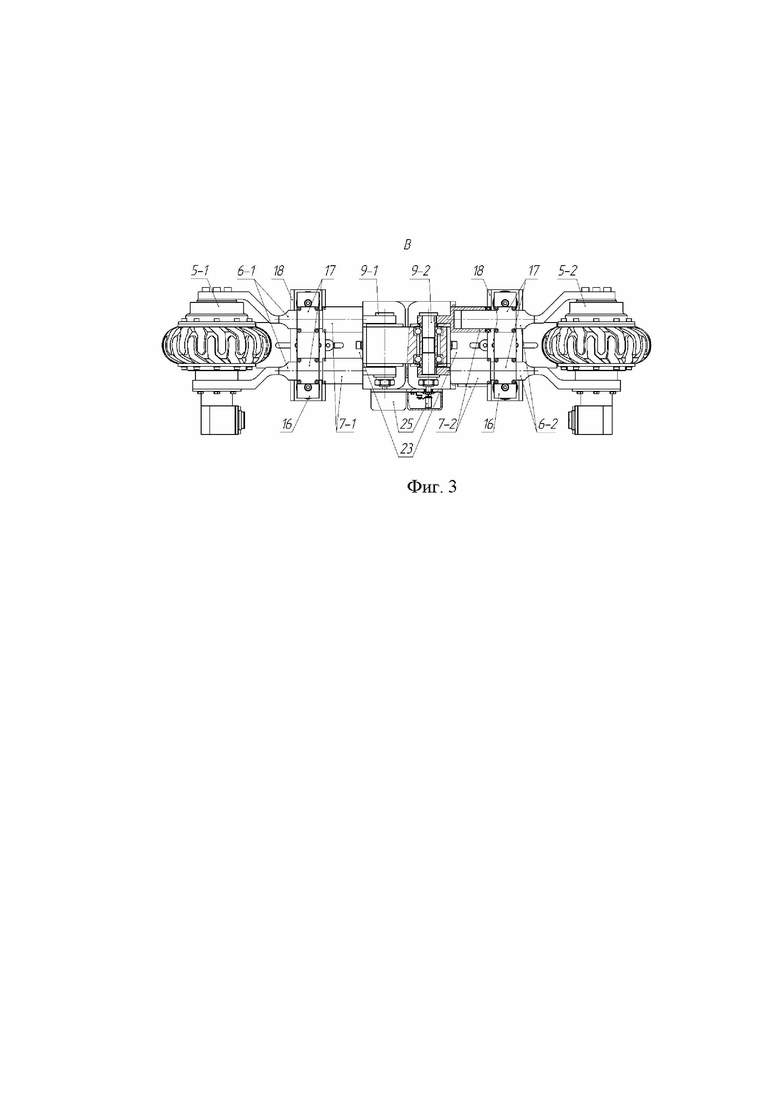
На фиг. 3 показана адаптивная колесная опора, вид снизу.
Адаптивная колесная опора транспортного модуля внутритрубного диагностического робота, который содержит центральное звено и соединенные с ним двухосевыми шарнирами два несущих основания, является одной из трех установленных на каждом несущем основании направленных радиально под углом 120° опорных ног и состоит из неподвижного корпуса 1 и подвижной секции 2 с установленным на ее конце колесным движителем. Каждая опорная нога телескопически выдвигается или втягивается с помощью своего электропривода 3 с самотормозящимся винтовым механизмом 4. Колесный движитель состоит из двух независимых приводных мотор-колес 5-1 и 5-2, каждое из которых установлено на конце своего штока 6-1, 6-2, установленных в гильзах 7-1, 7-2 двухлучевого телескопического рычага, идентичные лучи которого выполнены в виде двухсекционных телескопических стрел (фиг. 3). Установленные на гильзах скобы 8-1, 8-2 фиксируют выбранную длину выдвижения штоков рычагов L1, L2.
Каждый рычаг соединен с подвижной секцией 2 вторыми концами гильз 7-1, 7-2 с помощью цилиндрических шарниров 9-1, 9-2, оси которых направлены перпендикулярно продольной оси робота. Рычаги подпружинены относительно подвижной секции 2 с помощью двух одинаковых пружин сжатия 10-1, 10-2 для колеса 5-1 и 11-1, 11-2 для колеса 5-2 соответственно. Каждая пружина на каждом рычаге концами установлена (надета) на паре встречных верхних и нижних конусных упоров 12-1, 12-2, 13-1, 13-2 (см. схему размещения А-А на фиг. 1,) и 14-1, 14-2, 15-1, 15-2 (см фиг. 2) соответственно. Нижние упоры 12-2, 13-2, 14-2 и 15-2 размещены на нижних установочных планках 16, которые устанавливаются в требуемом положении по длине l1, l2 на штоках рычагов и фиксируются двумя прижимными скобами 17, как показано на фиг. 2 для колеса 5-2. Верхние упоры 12-1, 13-1, 14-1 и 15-1 размещены на верхних планках 18, которые соединяются с подвижными плитами 19 посредством двух направляющих 20, ограничивающих любое смещение планок 18 относительно плиты 19, кроме движения вдоль оси, при этом планки 18 передают усилие сжатия с пружин 11 на датчик усилия 21, установленный на плите 19, через регулировочный винт 22. Плита 19 установлена на кронштейне 23, который закреплен на подвижной секции 2. Размещение элементов пружинной подвески для колеса 5-1 аналогично колесу 5-2 и детально на фиг. 1, 3 не показано.
Ограничение сжатия пружин выполняется с помощью регулировки зазора δ (фиг. 2) между встречными парными конусными упорами 12, 13, 14, 15 с помощью регулировочных винтов 24, а измерение углов поворотов рычагов осуществляется с помощью пары датчиков 25 (фиг. 3).
Мотор-колеса выполнены с шинами, которым придана тороидальная форма с протектором, с контактной поверхностью, радиус которой меньше внутреннего радиуса трубы и изготовленными из материала с высоким коэффициентом трения, например, методом литья из резины или полиуретана.
Адаптивная колесная опора транспортного модуля внутритрубного диагностического робота функционирует следующим образом.
На стадии проектирования выполняют распределение масс оборудования робота, выбирают параметры пружин - диаметр, длина и жесткость, определяют длины рычагов L1, L2, место установки нижних установочных планок 16 на штоках 6-1, 6-2 на расстояниях l1, l2 от осей шарниров 9-1, 9-2 (фиг. 1), устанавливают зазоры 5 между установочными конусами (фиг. 2). После сборки диагностического робота и установки его на горизонтальный стапель путем корректировок длин рычагов перемещением штоков в гильзах рычагов, мест установки пружин путем смещения планок 16 и их начального поджатия с помощью регулировочных винтов 22 для всех опорных ног диагностического робота в сборе добиваются горизонтальности и прямолинейности оси робота составленной из осей несущих оснований и центральной части транспортного модуля при разблокированных шарнирах между ними. После окончания балансировки выполняют фиксацию полученных параметров опоры с помощью обжимных скоб 8-1, 8-2 (фиг. 1), прижимных скоб 17 и контровочной гайки на винте 22 (фиг. 2).
Техническим результатом предложенного изобретения является возможность адаптации опоры транспортного модуля при балансировке робота, придание ему статической устойчивости, снижение нагрузки на опорное колесо и улучшение его сцепления с внутренней поверхностью трубы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР | 2012 |
|
RU2529820C2 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2020 |
|
RU2739853C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
Изобретение относится к транспортным средствам, способным перемещаться внутри трубопроводов, и может использоваться в качестве опорного конструктивного элемента транспортного модуля внутритрубного автономного диагностического робота для проведения диагностики состояния трубопроводов, для которых характерны значительные перепады диаметров труб, локальные изменения направления в вертикальной и горизонтальной плоскостях, а также ответвления трубопровода. Адаптивная колесная опора транспортного модуля внутритрубного диагностического робота, который содержит центральное звено и соединенные с ним двухосевыми шарнирами два несущих основания, является одной из трех установленных на каждом несущем основании, направленных радиально под углом 120°, опорных ног с независимыми приводными колесными движителями и состоит из неподвижного корпуса и подвижной секции с установленным на ее конце колесным движителем, при этом колесный движитель состоит из двух независимых приводных мотор-колес, каждое из которых установлено на конце своего рычага, который вторым концом с помощью цилиндрического шарнира установлен на подвижной секции опорной ноги и подпружинен относительно нее с помощью двух одинаковых пружин сжатия, симметрично расположенных относительно продольной оси рычага, а рычаги выполнены с возможностью изменения длины каждого рычага, изменения положения точки крепления каждой пары пружин на своем рычаге и изменения величины начального поджатия каждой пружины, предусмотрены ограничители сжатия пружин. На каждой опоре установлены датчики, контролирующие перемещение подвижной секции относительно неподвижного корпуса опоры, датчики поворотов рычагов и датчики суммарного усилия сжатия пружин на каждом рычаге. 3 ил.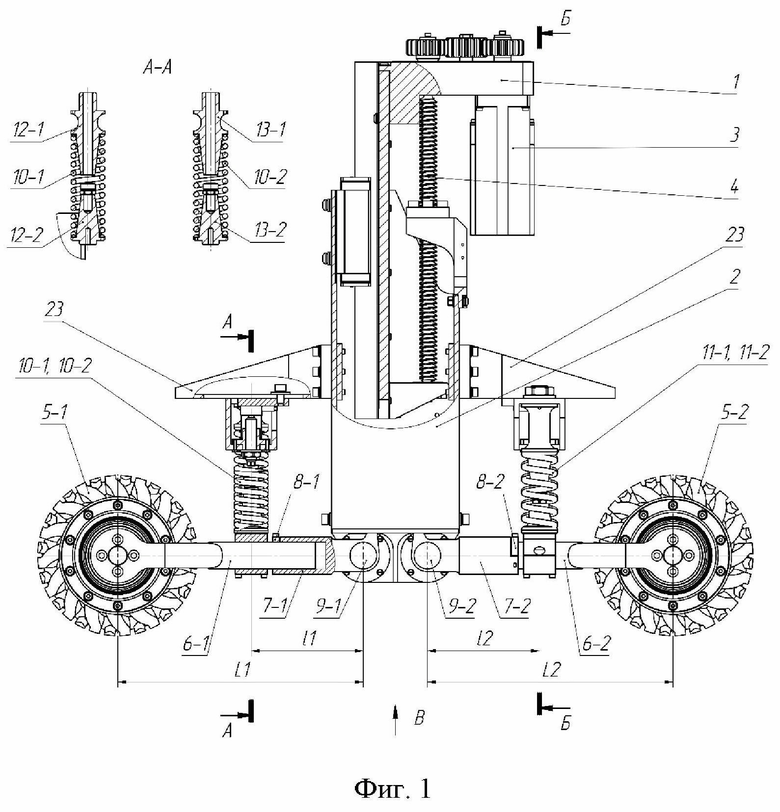
Адаптивная колесная опора транспортного модуля внутритрубного диагностического робота, который содержит центральное звено и соединенные с ним двухосевыми шарнирами два несущих основания, являющаяся одной из трех установленных на каждом несущем основании, направленных радиально под углом 120°, опорных ног с независимыми приводными колесными движителями и состоящая из неподвижного корпуса и подвижной секции с установленным на ее конце колесным движителем, которая телескопически выдвигается или втягивается с помощью своего независимого электропривода с самотормозящимся винтовым механизмом, отличающаяся тем, что колесный движитель состоит из двух независимых приводных мотор-колес, каждое из которых установлено на конце своего рычага, который вторым концом с помощью цилиндрического шарнира установлен на подвижной секции опорной ноги и подпружинен относительно нее с помощью двух одинаковых пружин сжатия, симметрично расположенных относительно продольной оси рычага, причем ось цилиндрического шарнира направлена перпендикулярно продольной оси робота, а рычаги выполнены с возможностью изменения длины каждого рычага, изменения положения точки крепления каждой пары пружин на своем рычаге и изменения величины начального поджатия каждой пружины, а также установлены ограничители сжатия пружин, при этом на каждой опоре установлены датчики, контролирующие перемещение подвижной секции относительно неподвижного корпуса опоры, датчики поворотов рычагов и датчики суммарного усилия сжатия двух пружин на каждом рычаге, при этом каждый рычаг выполнен в виде двухсекционной телескопической стрелы, неподвижная секция которой – гильза связана шарниром с подвижной секцией опоры ноги, а в гильзе размещена подвижная секция – шток, на конце которого установлено мотор-колесо, и в заданном положении закреплены нижние установочные планки с нижними установочными конусами, на верхней планке закреплены верхние установочные конуса, при этом на верхние и нижние установочные конуса надеты пружины, так что их нижние концы опираются на нижние установочные планки, а верхние концы опираются на верхние планки, при этом верхняя планка в свою очередь соединена посредством двух линейных направляющих с подвижной плитой, установленной на кронштейне, закрепленном на подвижной секции опоры, при этом на верхней планке установлен соосный линейным направляющим и линии сжатия пружин регулировочный винт, который упирается в датчик усилия сжатия пружин, установленный на подвижной плите, а ограничение сжатия пружин обеспечено регулировкой зазора между встречными парными конусными упорами с помощью регулировочных винтов на одном из парных установочных конусов, при этом мотор-колеса выполнены с шинами тороидальной формы с протектором, с радиусом контактной поверхности, который меньше внутреннего радиуса трубы, и изготовленны из материала с высоким коэффициентом трения.
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| СПОСОБ ПОЛУЧЕНИЯ СИЛИКАЦИКЛОБУТАНОВЫХ ПРОИЗВОДНЫХ ДИ- или ПОЛИСИЛАЗАНОВ | 0 |
|
SU170056A1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| CN 106369287 A, 01.02.2017. | |||

