Изобретение относится к транспортным средствам, способным перемещаться внутри трубопроводов, и может использоваться качестве транспортного модуля внутритрубного диагностического робота, в том числе автономного, в частности, для проведения неразрушающего контроля, видеодиагностики состояния трубопровода, оценки остаточной толщины стенки трубы и т.п.
В настоящее время для внутритрубной диагностики используются как традиционные внутритрубные снаряды-дефектоскопы, так и автономные роботизированные сканеры-дефектоскопы. Внутритрубные снаряды движутся в трубе под действием потока газа, при этом труба не должна менять проходное сечение. Такие устройства могут быть использованы только на действующих магистральных газопроводах. В качестве автономного роботизированного диагностического устройства, предназначенного для работы внутри как магистральных, так и промысловых и технологических трубопроводов известен, например, мобильный робот для работы в трубопроводах сложной конфигурации по патенту ПМ 170 056 (2016), содержащий основание с установленными на нем электродвигателем, тремя расположенными относительно друг друга под углом 120° одинаковыми колесными парами, механизмом передачи движения от электродвигателя на движитель с протектором и механизмом адаптации поджатая колес к поверхности трубопровода, причем, движитель выполнен в виде ремня, изготовленного с протектором на внешней, касающейся при работе устройства трубопровода стороне и зубчатым профилем, соответствующим профилю зубчатого венца ведущего колеса, на внутренней стороне, которое совместно с редуктором представляет собой механизм передачи движения от электродвигателя на движитель. Для промысловых и технологических трубопроводов характерны значительные до 150% перепады диаметров труб, локальные изменения направления вплоть до 180°, а также ответвления трубопровода при разделении потока транспортируемого продукта. Это конструктивные особенности реализуются с помощью стандартизированных соединительных трубопроводных элементов, соответственно, переходов, крутоизогнутых отводов и тройников. Недостатком описанного выше технического решения является относительно низкая маневренность при наличии препятствий, продолжительных наклонных в вертикальной плоскости участков трубопроводов, при прохождении описанных соединительных элементов, особенно крутоизогнутых отводов с радиусом поворота от одного 1 до полутора 1,5 внутренних диаметров трубы и равнопроходных тройников, а также относительно низкая точность сохранения соосности относительно оси трубопровода, что существенным образом влияет на точность диагностики большого числа методов измерений.
Наиболее близким аналогом, принятым за прототип, является роботизированная платформа ПМ194854 (2019), содержащая первое и второе несущие основания, каждое из которых содержит расположенные под углом 120° три опорные ноги с независимыми приводами с колесами с независимыми приводами, при этом первое и второе несущие основания жестко крепятся с помощью соединительных фланцев к корпусу полноповоротного диагностического модуля на его противоположных сторонах, который предназначен для установки контрольно-инструментальных диагностических средств.
Каждая из шести опорных ног с приводными колесами на конце представляет собой направленный вдоль оси трубы рычаг своим основанием установленный на независимом вращательном шарнире поворота рычага, обеспечивающем качание рычага ноги в радиальной плоскости трубы. Соответственно, ось шарнира направлена по касательной к окружности сечения трубы, а сами шарниры установлены на несущих основаниях. Такая кинематическая схема платформы с качающимися рычагами ног позволяет преодолевать переходы, когда требуется двигаться по трубе с конусной внутренней поверхностью за счет изменения угла наклона рычагов к оси трубы. Так, при движении внутри трубы с минимально возможным диаметром, рычаги практически вытянуты вдоль оси трубы и имеют наибольший угол наклона к оси при движении в трубе с максимальным возможным диаметром, а при движении в конусном переходе с изменением диаметра три независимых шарнира поворота рычагов должны согласованно изменять углы наклона трех рычагов опорных ног последовательно на каждом несущем основании.
Основным недостатком прототипа является сложность преодоления крутоизогнутых отводов с углом поворота 90° и более, особенно для труб с минимально возможным малым диаметром по условию прохождения перехода. Это связано с достаточно большой длиной роботизированной платформы с вытянутыми ногами, т.к. известно, что для преодоления поворота трубы с заданным диаметров и углом поворота требуется выполнить вполне определенное условие, накладывающее требование на соотношение внутреннего диаметра трубы D, диаметра корпуса платформы в его средней части и длины платформы L между опорными колесами. Очевидно, что диаметр корпуса платформы из конструктивных соображений не может быть меньше некоторой величины, которая обусловлена размерами диагностической аппаратуры, размерами и количеством аккумуляторных батарей, которое достаточно велико для питания автономного робота, аппаратуры связи и управления, размерами корпуса диагностического модуля, который должен одновременно вмещать в себя всю аппаратуру, обеспечивать достаточную прочность и большую жесткость всей конструкции. При этом, очевидно, что при конструктивной компоновке корпуса диагностического модуля с минимальным диаметром его длина lк будет максимальной. В то же время при перемещении в трубе с минимальным диаметром, когда рычаги практически вытянуты вдоль оси, общая длина робота максимальна, а условия успешного прохождения отвода роботом такой длины определяют некоторый минимальный диаметр трубы, меньше которого отвод непроходим, и этот диаметр больше чем малый диаметр перехода D1. В то же время, максимальный диаметр трубы D2 в которой сможет двигаться робот с данной кинематикой определяется диаметром корпуса и удвоенной длиной рычагов, которые повернуты на 90°, поэтому при прохождении равнопроходного тройника для труб с максимальным диаметром прохождения конусного перехода одна из опорных ног будет терять контакт с внутренней поверхностью трубы в зоне соединения труб, что делает невозможным прохождение такого тройника.
Вместе с тем, при работе диагностического робота расходуется электроэнергия на работу бортовой аппаратуры, работу приводов колес и работу электроприводов поворотов шарниров при качании рычагов для прохождения переходов и для поддержания практически неизменных углов рычагов при езде в трубах с постоянным диаметром. В последнем случае электродвигатели длительно работают в самом неэффективном, с точки зрения кпд, режиме удержания угла поворота ротора, что приводит к нерациональному высокому расходу энергии, особенно при перемещении по протяженным наклонным участкам и загрязненным, например, маслянистыми отложениями, участкам с пониженным коэффициентом трения между колесами и трубой, когда необходимо развивать большие моменты на шарнирах для обеспечения больших распорных усилий на рычагах, что в свою очередь, ускоряет расход энергии аккумуляторных батарей и ограничивает тем самым длину обследуемого участка трубопровода, например, за один проход автономным диагностическим роботом.
Таким образом, у рассмотренной в качестве прототипа транспортной платформы диагностического робота снижена транспортная мобильность при работе в трубопроводах со сложной конфигурацией, характеризуемой наличием крутоизогнутых отводов, равнопроходных тройников и наличием протяженных наклонных участков. Это выражается в неспособности проходить крутоизогнутые отводы (повороты) труб с минимальным диаметром трубы D1 и преодолевать равнопроходные тройники с максимальным диаметром D2, которые соответствуют диаметрам конусного перехода, который может успешно проходить рассматриваемая платформа, а также в снижении длины обследуемого роботом за один проход участка трубы, связанное с нерационально высоким расходом энергии бортового аккумулятора при движении робота.
Задачей изобретения является повышение транспортной мобильности диагностического робота за счет:
- увеличения диапазона изменения диаметров труб трубопроводов со сложной конфигурацией, в которых может работать робот,
- увеличения длины инспектируемого участка за один проход робота.
Увеличение диапазона изменения диаметров труб достигается путем обеспечения прохождения транспортным модулем внутритрубного диагностического робота трубопроводов с равными минимальными диаметрами D1 конусных переходов и крутоизогнутых отводов и равными максимальными диаметрами D2 конусных переходов и равнопроходных тройников при наибольшей разнице диаметров D1 и D2.
Увеличение продолжительности работы с увеличением длины инспектируемого участка за один проход робота осуществляется путем снижения энергозатрат на работу электроприводов опорных ног при прохождении переходов и создании необходимых распорных усилий при прохождении наклонных участков трубопроводов и загрязненных замасленных участков с низким коэффициентом трения в области контакта колес с внутренней поверхностью трубы.
Снижение диаметра прохождения крутоизогнутого отвода достигается путем значительного снижается длины жесткого элемента, вписываемого в поворот отвода за счет, того что
- во первых, первое и второе несущие основания с установленными на них под углом 120 градусов тремя опорными ногами с независимыми приводными колесными движителями соединяются с корпусом на котором устанавливается бортовая аппаратура необходимая для функционирования робота и проведения диагностических операций с помощью пары двухосевых шарниров, которые размещены на противоположных концах корпуса, причем при езде в прямолинейных участках трубы повороты шарниров блокируются, а при прохождения поворотов отводов обеспечиваются согласованные повороты шарниров независимо при необходимости вокруг каждой пары параллельных осей степеней подвижности шарниров,
- во вторых, все опорные ноги направлены радиально, и изменяют свою длину путем телескопического выдвижения подвижной секции с помощью своего независимого электропривода с винтовым механизмом, что обеспечивает высокую точность и плавность поступательного перемещения подвижной секции, а также снижает длину несущего основания,
- в третьих, уменьшена длина центрального корпуса транспортного модуля за счет того, что часть бортовой аппаратуры выносится за пределы корпуса и устанавливается на несущих основаниях.
Прохождение тройников без потери контакта одной из опорных ног с трубой в зоне соединения труб обеспечивается достаточным запасом выдвижения подвижной секции опорной ноги.
В то же время, наличие двухосевых шарниров в конструкции транспортного модуля робота обеспечивает возможность успешно проходить отводы в вертикальной плоскости на наклонных участках трубопровода.
Снижение энергозатрат на работу электроприводов опорных ног для создания необходимых распорных усилий достигается путем применения более экономичного с точки зрения собственной массы, жесткости и энергозатрат винтового привода для «прямого» создания и поддержания распорного усилия, по сравнению с вращательным приводом, работающим с большим рычагом ноги за счет малости углов винтовой линии вплоть до самоторможения передачи.
Сущность изобретения поясняется следующими рисунками и чертежами.
На фиг. 1 показан транспортный модуль диагностического робота в прямой трубе, вид сбоку.
На фиг. 2 показан транспортный модуль диагностического робота в прямой трубе, вид спереди сечение А-А.
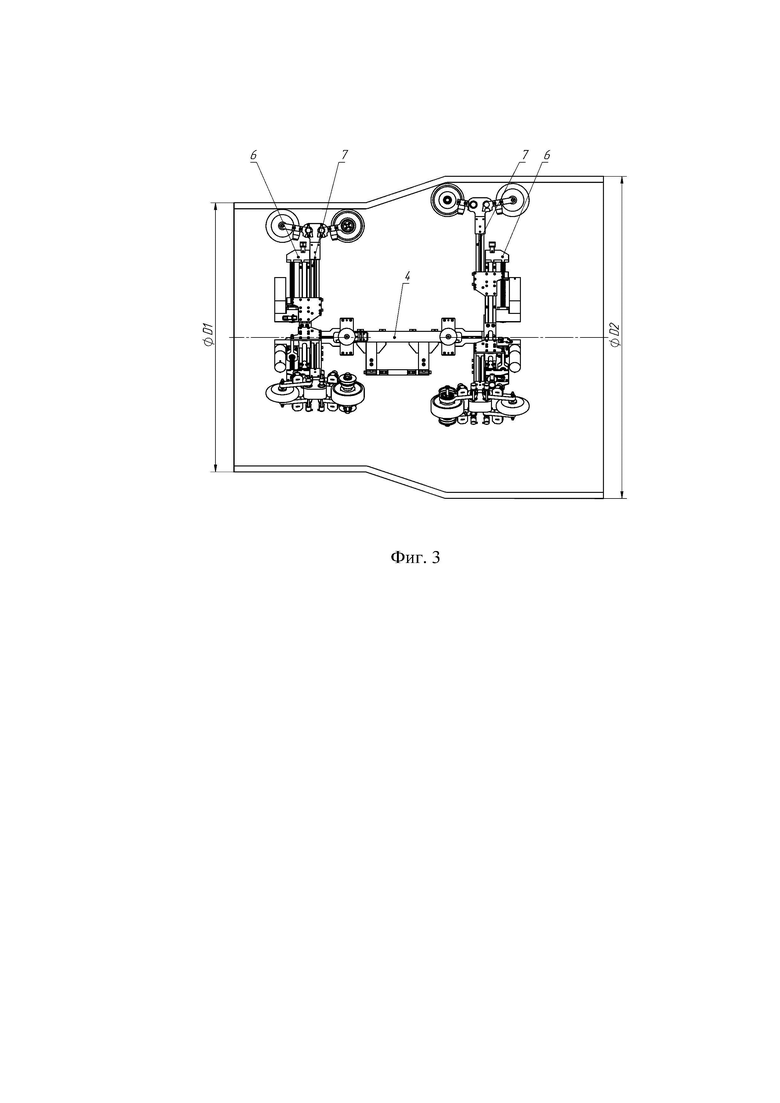
На фиг. 3 показан транспортный модуль в переходе.
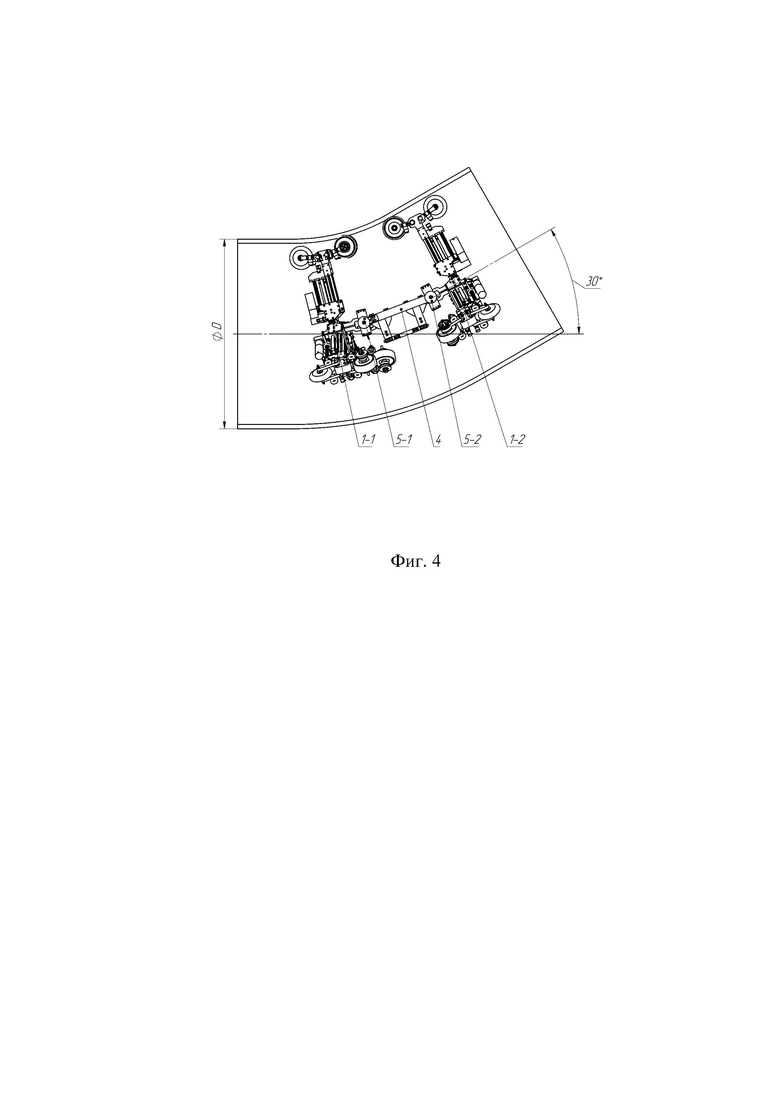
На фиг. 4 показан транспортный модуль на входе в наклонный участок трубопровода в вертикальной плоскости.
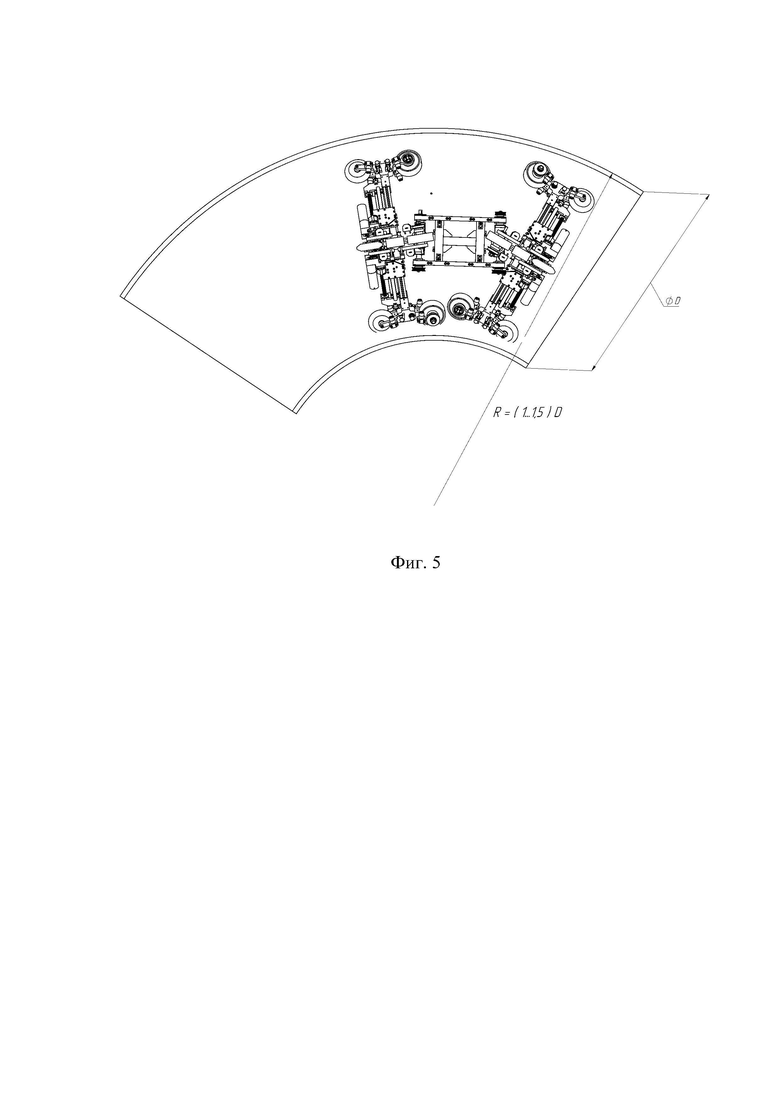
На фиг. 5 показан транспортный модуль в крутоизогнутом отводе в горизонтальной плоскости.
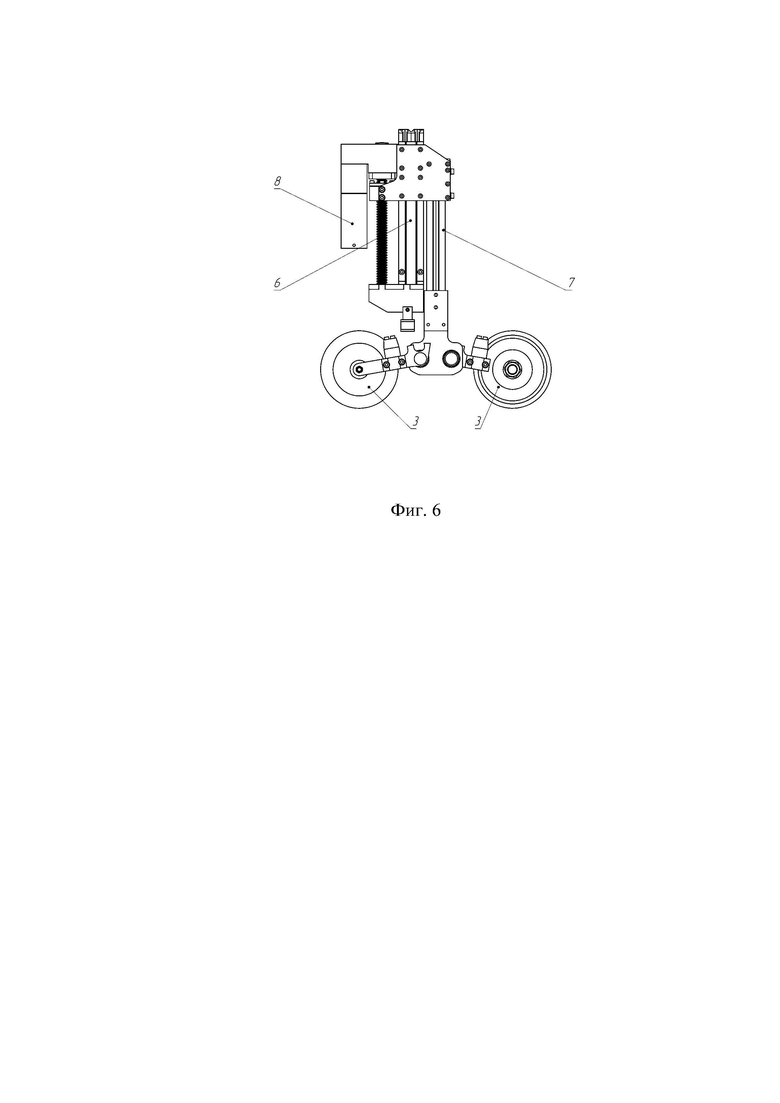
На фиг. 6 показана структура опорной ноги.
Транспортный модуль внутритрубного диагностического робота содержит первое 1-1 и второе 1-2 несущие основания, на каждом из которых радиально установлены под углом 120° три опорных ноги 2 с независимыми приводными колесными движителями 3. Несущие основания соединены с центральным корпусом 4 на его противоположных сторонах с помощью двухосевых шарниров 5-1 и 5-2 соответственно. Элементы бортового оборудования (на рисунках не показаны) диагностического робота необходимого для его функционирования по назначению размещены на корпусе 4 и, например, на обоих несущих основаниях 1-1 и 1-2, что обеспечило уменьшение длины lк центрального корпуса 4, фиг. 1.
Все опорные ноги 2 направлены радиально и состоят из неподвижного корпуса 6 и подвижной секции 7 с установленными на ней колесными движителями 3. В конструкции опорной ноги может быть использован любой тип телескопического соединения, например, с использованием силовых линейных направляющих, которое обеспечивает телескопическое выдвижение или втягивание подвижной секция 7 помощью своего независимого электропривода 8 с винтовым механизмом. В свою очередь, винтовой механизм может быть выполнен с соблюдением условий самоторможения.
Транспортный модуль внутритрубного диагностического робота работает следующим образом. Перед началом работы по назначению диагностический робот загружают внутрь трубопровода с помощью штатных приспособлений через места загрузки обычно на прямолинейном участке трубопровода. Диагностический робот приводят в рабочее состояние, при этом транспортный модуль ориентируют вдоль оси трубы с помощью установки длин ног 2, соответствующих внутреннему диаметру трубы D, Затраты энергии на поддержание длин ног при этом минимальны, а при установке самотормозящихся винтовых механизмов затраты энергии отсутствуют вовсе. Двухосевые шарниры 5-1, 5-2, блокируют, например, с помощью встроенных тормозов, и длина «жесткого» транспортного модуля составляет величину L, фиг. 1. Включают независимые приводы колесных движителей 3, при этом транспортный модуль движется вдоль трубы, и робот выполняет запланированные диагностические операции с помощью соответствующего диагностического оборудования, запись результатов и передачу их на пульт управления. При необходимости перехода в трубу, например, большего диаметра, как показано на фиг. 3, подвижные секции ног 8 согласованно выдвигают, а скорости выдвижения соотносятся с углом наклона конуса и принятой скоростью поступательного движения транспортного модуля, причем соотношения скоростей изначально задают программно, а затем они могут поддерживаться автоматически, т.к. параметры алгоритмов управления могут быть определены в ходе настройки системы управления роботом. Таким образом, транспортный модуль преодолевает переход последовательно изменяя длину ног 2 на обоих несущих основаниях 1-1 и 1-2 при заблокированных шарнирах 5-1 и 5-2.
При вхождении в наклонный в вертикальной плоскости участок трубопровода, как показано на фиг. 4, горизонтально направленные оси шарниров 5-1 и 5-2 разблокируют и согласованно поворачивают, например, с помощью независимых управляемых приводов, а параметры алгоритмов управления также могут быть отработаны заранее.
При прохождении поворота отвода в горизонтальной плоскости, как показано на фиг. 5, вертикально направленные оси шарниров 5-1 и 5-2 разблокируют и согласованно поворачивают, при этом длина жесткого элемента транспортного модуля существенно уменьшена до длины корпуса lк, что вместе с заранее отработанными параметрами алгоритмов управления для каждого возможного случая диаметра трубы, угла и радиуса отвода обеспечивает успешное прохождение транспортным модулем любых крутоизогнутых отводов. При необходимости вхождения в наклонный участок с поворотом разблокируют обе пары осей шарниров 5-1 и 5-2.
При прохождении тройника, соответствующая зоне соединения труб изменяют длину опорной ноги за счет выдвижения и втягивания подвижной секции 7 для сохранения контакта колесного движителя с поверхностью стыкуемых труб тройника.
Таким образом, предложенный транспортный модуль внутритрубного диагностического робота обладает достаточной транспортной мобильностью для работы в трубопроводах со сложной конфигурацией при необходимости преодоления переходов с максимальным перепадом диаметров, крутоизогнутых отводов и равнопроходных тройников.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2021 |
|
RU2784960C2 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| СИСТЕМА ИЗМЕРИТЕЛЬНАЯ МАГНИТНАЯ ВНУТРИТРУБНАЯ | 2021 |
|
RU2759875C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ ВНУТРИТРУБНЫЙ ИНТРОСКОП | 2017 |
|
RU2675422C1 |


Изобретение относится к транспортным средствам, способным перемещаться внутри трубопроводов со сложной конфигурацией. Транспортный модуль внутритрубного диагностического робота содержит первое и второе несущие основания, содержащие установленные под углом 120° три опорные ноги с независимыми приводными колесными движителями. Основания соединены на противоположных сторонах с предназначенным для установки бортовой аппаратуры центральным корпусом с помощью двухосевых шарниров. При движении в прямолинейных участках трубы повороты шарниров блокируются, а при прохождении поворотов отводов обеспечиваются согласованные повороты шарниров независимо вокруг каждой пары параллельных осей степеней подвижности шарниров. Часть бортовой аппаратуры выносится за пределы центрального корпуса и устанавливается на одном или обоих несущих основаниях. Опорные ноги устанавливаются радиально и состоят из неподвижного корпуса и подвижной секции с установленным на ней колесным движителем, а подвижная секция телескопически выдвигается или втягивается с помощью своего независимого электропривода с винтовым механизмом. 2 з.п. ф-лы, 6 ил.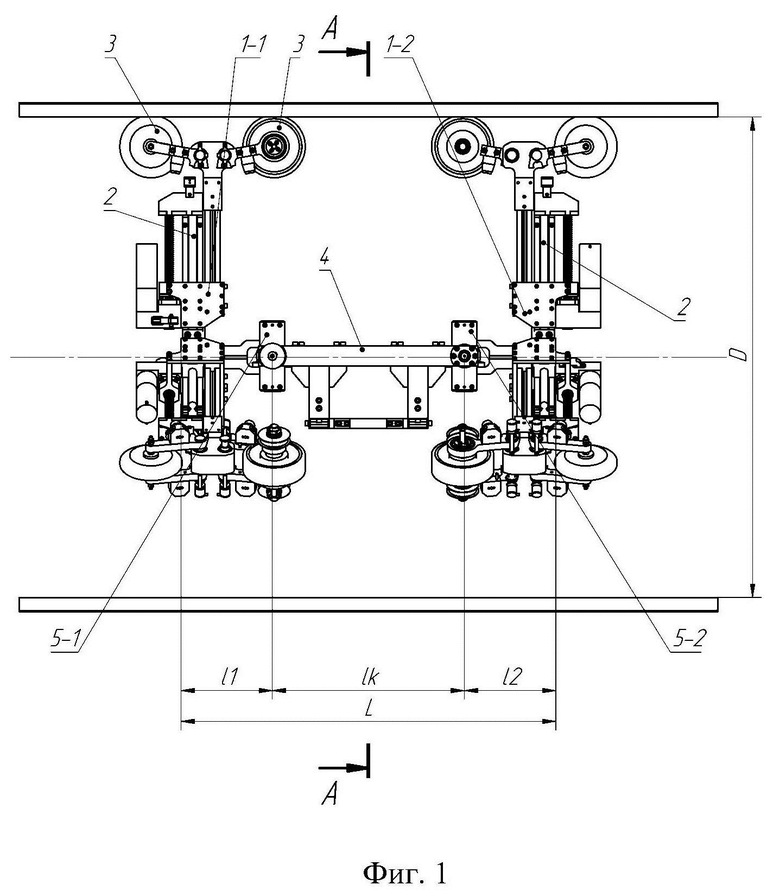
1. Транспортный модуль внутритрубного диагностического робота, содержащий первое и второе несущие основания, включающие установленные под углом 120° три опорные ноги с независимыми приводными колесными движителями, соединенные на противоположных сторонах с центральным корпусом, предназначенным для установки бортовой аппаратуры, необходимой для функционирования робота и проведения диагностических операций, отличающийся тем, что соединения несущих оснований с центральным корпусом выполнены с помощью двухосевых шарниров, причем при движении в прямолинейных участках трубы повороты шарниров блокируются, а при прохождении поворотов в отводах обеспечиваются согласованные повороты шарниров независимо вокруг каждой пары параллельных осей степеней подвижности шарниров, при этом все опорные ноги направлены радиально и состоят из неподвижного корпуса и подвижной секции с установленным на ней колесным движителем, причем каждая подвижная секция телескопически выдвигается или втягивается с помощью своего независимого электропривода с винтовым механизмом.
2. Транспортный модуль внутритрубного диагностического робота по п. 1, отличающийся тем, что винтовой механизм телескопического выдвижения или втягивания подвижной секции опорной ноги выполнен самотормозящимся.
3. Транспортный модуль внутритрубного диагностического робота по п. 1, отличающийся тем, что часть бортовой аппаратуры выносится за пределы центрального корпуса и устанавливается на одном или обоих несущих основаниях.
| ВЫПУСКНОЙ КЛАПАН ПОРШНЕВОГО ДЕТАНДЕРА | 0 |
|
SU194854A1 |
| Передвижной конвейер | 1962 |
|
SU151608A1 |
| СПОСОБ ПОЛУЧЕНИЯ СИЛИКАЦИКЛОБУТАНОВЫХ ПРОИЗВОДНЫХ ДИ- или ПОЛИСИЛАЗАНОВ | 0 |
|
SU170056A1 |
| CN 202272092 U, 13.06.2012. | |||
