Изобретение относится к устройствам для передвижения внутри трубопроводов и может быть использовано для автоматизации работ в них.
Цель изобретения - облегчение прохода изгибов трубопровода.
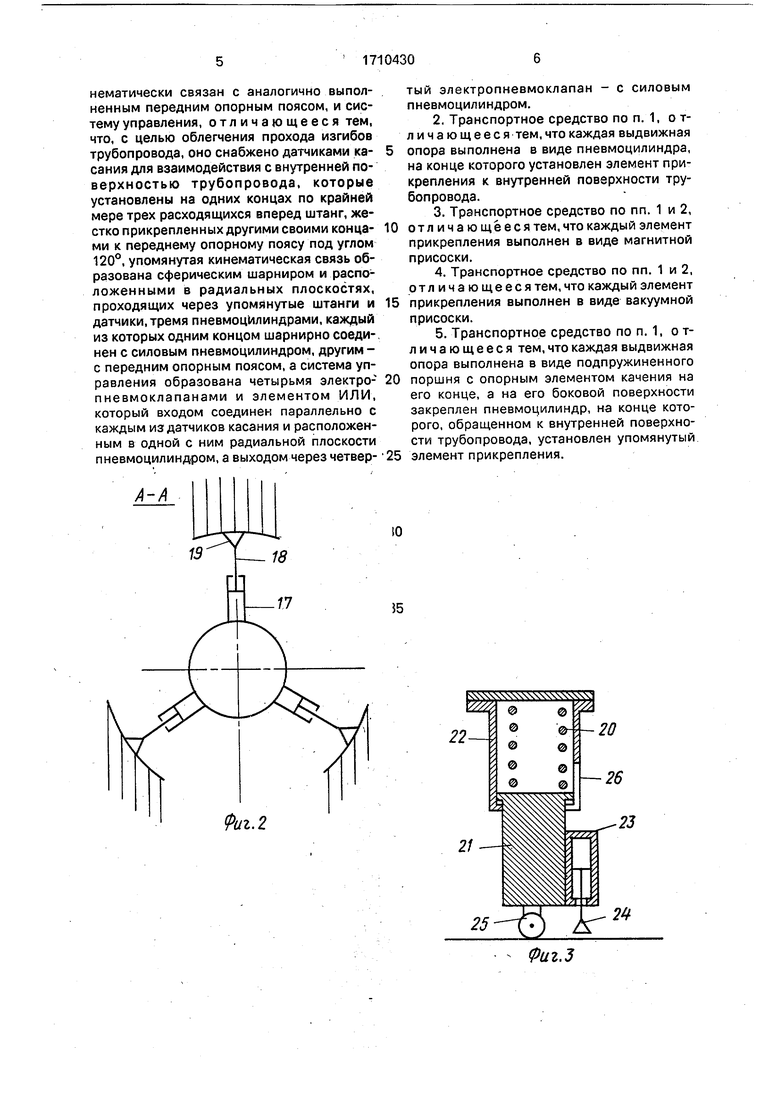
На фиг. 1 представлено транспортное средство, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вариант выполнения выдвижной опоры.
Шагающее транспортное средство содержит передний 1 и задний 2 опорные поясы, соединенные шарниром 3 и пневмоцилиндрами 4-6 углового перемещения платформ, основания которых расположены под.углом 120° относительно их проекции вдоль продольной оси устройства с образованием телесного угла между ними, что позволяет создавать моменты относительно шарнира 3, скрепленного со штоком пневмоцилиндра 7 поступательного перемещения поясов, жестко установленного вдоль оси заднего пояса. Датчики 8-10 наличия препятствия расположены на поясе 1 с выходом за передние и боковые габариты устройства и связаны соответственно через электропневмоклапаны 11-13 с цилиндрами 4-6 и через последовательно соединенные элемент ИЛИ 14 и электропневмоклапан 15 с цилиндром 7. Фиксирующие опоры 16 установлены в количестве не менее трех на каждом поясе в плоскости, перпендикулярной направлению движения устройства. Опора 16 в наиболее простом варианте реализации может быть выполнена в виде пневмоцилиндра 17, шток 18 которого снабжен фиксирующим элементом 19, выполненным в виде электромагнита или вакуумной присоски. Ход штока превышает максимально возможное отклонение оси транспортного средства от поверхности трубы. Однако такая конструкция потребляет значительное количество рабочего тела из-за необходимости создания относительно большого рабочего хода поршня. Кроме того, в процессе шагания на фиксирующие элементы действуют значительные ударные нагрузки, поскольку пневмоцилиндр 17 является релейным (дискретным) элементом.
Указанных недостатков лишен вариант реализации опоры в виде подпружиненного к поверхности фиксации пружиной 20 поршня 21 в корпусе 22. На боковой поверхности поршня 21 закреплен пневмоцилиндр 23, на штоке которого установлен фиксирующий элемент 24, выполненный, например, в виде вакуумного или магнитного захвата, а на торцевой поверхности поршня 21, обращенной к поверхности фиксации, закреплен с возможностью качения опорный
лемент25, выполненный, например, в виде колесного или шарового соединения. В корпусе 22 может быть предусмотрено окно 26 для уменьшения габаритов опоры 16 путем возможности входа цилиндра 23 в корпус 22.
Транспортное средство работает следующим образом.
В исходном состоянии опоры 16 пояса 2 зафиксированына внутренней поверхности трубы, а опоры 16 пояса 1 втянуты. Шток цилиндра 7 выдвигается, перемещая пояс 1 вперед, положение которого при соединенных с атмосферой полостях цилиндров 4-6 фиксируется силами трения в подвижных соединениях. При отсутствии изгибов в трубе фиксируются опоры 16 пояса 1, освобождаются опоры 16 пояса 2, и цилиндр 7 подтягивается относительно своего неподвижного поршня, перемещая вперед пояс 2. В данном режиме движения датчики 8-10 не касаются поверхности трубы, клапаны 1113 соединены с атмосферой, на выходе элемента ИЛИ 14 нет управляющего сигнала, и клапан 15 связывает бесштоковую полость цилиндра 7 с глухой камерой.
При подходе к изгибу трубы один или два датчика входят в контакт с трубой и выдают сигнал на соответствующие клапаны 11-13, которые соединяют с источником давления бесштоковые полости соответствующих цилиндров 4-6, штоки которых перемещают пояс 1 вокруг шарнира 3 в сторону исключения контакта датчика с поверхностью трубы. Три датчика, расположенные под углом 120° по сечению трубы, позволяют обеспечить пространственное отслеживание произвольного изгиба оси трубы. В момент касания поверхности трубы хотя бы одним датчиком поступательное движение прекращается, так как на выходе элемента ИЛИ 14 появляется сигнал, соединяющий бесштоковую полость цилиндра 7 с атмосферой через клапан 15. После корректировки положения пояса 1 продолжается его движение вперед до окончания рабочего хода цилиндра 7. При крутых изгибах происходит несколько корректировок положения пояса 1 за рабочий ход цилиндра J. После этого пояс 1 фиксируется на поверхности трубы, а пояс2 подтягивается вперед. Затем цикл движения повторяется.
Формула изобретения
1. Внутритрубное шагающее транспортное средство, содержащее установленный выдвижными опорами на внутренней поверхности трубопровода задний опорный пояс, к которому жестко прикреплен конец расположенного соосно с поясом силового пневмоцилиндра, другой конец которого ки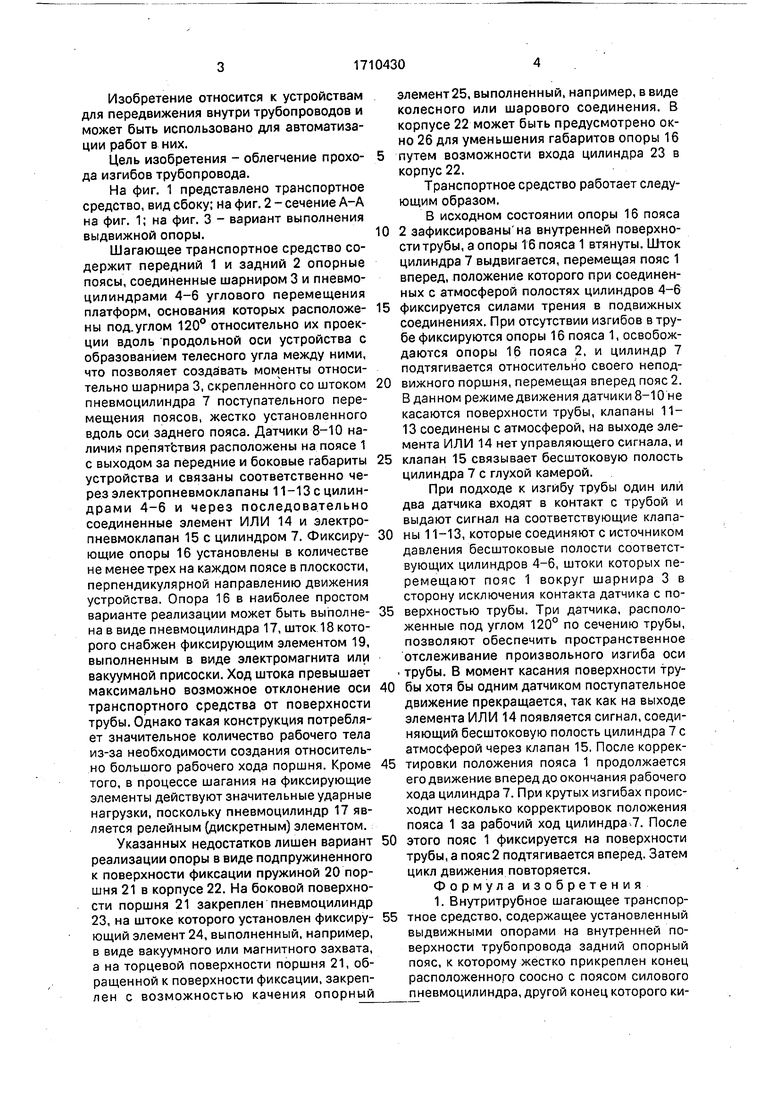
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности | 1989 |
|
SU1782849A1 |
| Пневматическая противоблокировочная тормозная система транспортного средства | 1981 |
|
SU1043055A1 |
| ПНЕВМОПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 2013 |
|
RU2529988C1 |
| Устройство для подачи заготовок | 1980 |
|
SU895616A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1220717A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЕДЯНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2736796C1 |
| Вакуумное захватное устройство | 1990 |
|
SU1796580A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
Изобретение относится к внутритруб- ным устройствам и может быть использовано для автоматизации работ в трубах. Цель изобретения - облегчение прохода изгибов трубопровода. Транспортное средство содержит два шарнирно соединенных через . пйевмоцилиндры 4-6 опорных пояса 1 и 2, снабженных средством их взаимного поочередного перемещения, выполненным в виде пневмоцилиндра 7, и датчики 8-10 наличия препятствия. При подходе к изгибу трубыодин или два датчика входят в контакт с трубой и выдают сигнал на систему управления, которая соединяет с источником давления бесштоковые пoлoctи соответствующих цилиндров 4-6, штоки которых перемещают пояс 1 вокруг шарнира 3 в сторону исключения контакта датчиков с поверхностью трубы. Три датчика, расположенных под углом 120° по сечению трубы, позволяют обеспечить пространственное отслеживание произвольного изгиба оси трубы. В момент касания поверхности трубы хотя бы одним датчиком поступательное движение устройства прекращается и система управления сообщает бесштрковую полость цилиндра 7 с атмосферой. После корректировки положения пояса 1 продолжается его движение вперед до окончания рабочего хода цилиндра 7. При крутых изгибах происходит несколько корректировок положения пояса 1 за рабочий ход цилиндр'а 7. После этого пояс1фиксируется на поверхности трубы, а пояс2подтягивается вперед. 4 з.п. ф-лы, 3 ил.^'///////.•//////7/////////////// Vuz.1'ОJb.соО>&
| Самоходное устройство для перемещенияОчиСТНыХ иНСТРуМЕНТОВ B ТРубОпРОВОдЕ | 1979 |
|
SU820927A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
