ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области техники контроля авиационного двигателя. В частности, изобретение относится к обнаружению аномалий в средстве управления авиационного двигателя. Более точно, изобретение относится к обнаружению аномалий работы схемы для регулирования статорных клапанов в компрессорах турбореактивного двигателя.
В многочисленных отраслях промышленности, таких как авиация или космонавтика, установившаяся практика состоит в том, чтобы использовать инструментальные средства контроля.
Тем не менее, контроль или обнаружение аномалий авиационного двигателя часто выполняется посредством наблюдения за очень большим количеством элементов двигателя некоторым образом, который является независимым и прерывистым во времени.
Такие наблюдения дают начало очень большому количеству данных, которые требуют значительного количества времени расчета, для того чтобы анализироваться.
Более того, может случаться, что аномалия указывается ошибочно, или даже что элемент двигателя неисправен без обнаружения этого события в результате отсутствия какого бы то ни было подходящего индикатора, непрерывно контролирующего надлежащую работу упомянутого элемента.
ЦЕЛЬ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает способ обнаружения аномалий в авиационном двигателе, способ содержит следующие этапы:
• определение модели поведения для средства управления упомянутого авиационного двигателя посредством использования временной регрессии, которая моделирует поведение упомянутого средства управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и управления упомянутого средства управления;
• непрерывный перерасчет упомянутой модели поведения для каждого нового набора данных; и
• контроль статистической вариации упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства управления, представляющую аномалию работы упомянутого двигателя.
Таким образом, способ дает возможность использовать грубую модель с использованием минимального количества измерений и оптимизированного времени расчета для обнаружения аномалии поведения двигателя. В частности, посредством перерасчета грубой модели поведения средства управления последовательным образом наряду с использованием каждый раз очень небольшого количества измерений, и посредством отслеживания вариации модели со временем, можно с упреждением обнаруживать уход средства управления.
Способ также включает в себя следующие этапы:
• сбор начального набора данных, относящегося к упомянутому средству управления;
• разбиение упомянутого начального набора данных на множество одинаковых интервалов, представляющих разные режимы полета, идентифицированные индикаторами режима, определенными с использованием критериев, установленных экспертами; и
• определение эталонной модели поведения для каждого режима полета.
Таким образом, способ учитывает условия использования двигателя и включает в себя инструментальное средство для анализа и классификации фаз полета, чтобы обеспечить непрерывную работу. Более того, что касается условных требований к техническому обслуживанию, достаточно применять способ во время испытаний, для которого внешние условия стабильны и предопределены.
Способ также включает в себя следующие этапы:
• действие со временем для сбора текущего набора данных, относящегося к упомянутому средству управления;
• сохранение содержимого упомянутого текущего набора данных за предопределенный период времени в буфере памяти;
• из упомянутого текущего набора данных расчет оцененных индикаторов режима для идентификации текущего режима полета, специфичного упомянутому предопределенному периоду времени;
• расчет текущей модели поведения, соответствующей упомянутому текущему набору данных и упомянутому текущему режиму полета;
• оценивание несходства поведений между упомянутой текущей моделью поведения и упомянутой эталонной моделью поведения, соответствующей упомянутому текущему режиму полета; и
• обнаружение аномалии поведения упомянутого средства управления, когда упомянутое несходство поведений является большим, чем предопределенное пороговое значение нормальности.
Таким образом, как только модель поведения была калибрована, она легко применяется в реальном времени, сосредотачивая внимание на поведении небольшого количества элементов двигателя и рассчитывая несходство между эталонной моделью и текущей моделью, для того чтобы обнаружить отказ в процессе эксплуатации двигателя. Естественно, обнаружение отказа может существенно облегчать локализацию отказа.
Во втором аспекте настоящего изобретения упомянутая модель поведения является рациональным фильтром, определенным в следующих этапах:
• нормализации упомянутого начального набора данных вычитанием фильтра нижних частот и нормирования относительно локального разброса для каждого режима полета;
• определения множества математических формул, каждая формула выражает выходной вектор в настоящий момент y(t), представляющий текущее поведение упомянутого средства управления в зависимости от выходных векторов в предыдущие моменты y(t-i), представляющих более ранние измерения поведения, и в зависимости от входных векторов, содержащих входной вектор в настоящий момент x(t) и входные векторы в предыдущие моменты x(t-i), каждый входной вектор x строится конкатенацией упомянутых измерений команд и состояния упомянутого средства управления;
• использования упомянутого множества математических формул для определения эталонного рационального фильтра для каждого режима полета; и
• использования упомянутого множества математических формул для расчета текущего рационального фильтра, относящегося к упомянутому текущему набору данных и к упомянутому текущему режиму полета.
Таким образом, посредством моделирования средства управления с использованием рационального фильтра, получается очень хороший экстраполятор, который требует очень небольшого времени расчета и который дает возможность обнаруживать поддающиеся интерпретации вариации поведения по модели, которая является грубой.
Каждая математическая формула из упомянутого множества математических формул может соответствовать линейному уравнению между упомянутым выходным и входным векторами y и x, описанными аналитически во временной области посредством:
A(q)y = B(q)x, причем A(q) является вещественным полиномом формы:

а B(q) является вещественным полиномом, в котором каждый коэффициент является линейным вектором такой же размерности, как входной вектор x, имеющим форму:

причем

Таким образом, рациональный фильтр может легко идентифицироваться уникальным образом своими нулями и полюсами на комплексной плоскости. Благодаря этому легко отслеживать вариацию в состояниях модели поведения.
В варианте способ содержит:
• извлечение текущих нулей и полюсов полиномов, связанных с упомянутым текущим рациональным фильтром, соответствующим упомянутому текущему режиму полета;
• использование экспертных критериев для расчета индикаторов нормальности для упомянутого текущего режима полета из упомянутых текущих нулей и полюсов, а также из другой информации, представляющей контекст сбора данных, относящийся к упомянутому средству управления; и
• обнаружение аномалии поведения упомянутого средства управления, когда несходство между упомянутыми индикаторами нормальности и соответствующим пороговым значением нормальности является большим, чем предопределенное значение.
Таким образом, по уникальным характеристикам (нулям и полюсам) рациональных дробей, можно определять несходство, которое облегчает отслеживание статистической вариации этих характеристик, для того чтобы обнаруживать аномалию поведения средства управления.
В варианте способ содержит:
• использование функции, приспособленной к динамическому диапазону упомянутого средства управления, для определения несходства; и
• обнаружение аномалии поведения упомянутого средства управления, когда упомянутое несходство между эталонным рациональным фильтром и текущим рациональным фильтром является большим, чем предопределенное значение.
Таким образом, можно использовать более общий критерий непосредственно, без использования нулей и полюсов, для того чтобы обнаруживать аномалию поведения средства управления.
В примере по настоящему изобретению упомянутое средство управления соответствует схеме регулятора, которая приводит в действие исполнительные механизмы, управляющие статорными клапанами в компрессоре низкого давления и компрессоре высокого давления турбореактивного двигателя, служащие для модификации геометрий упомянутых компрессоров в зависимости от режима полета, а упомянутый набор данных, относящийся к упомянутой схеме регулятора, включает в себя данные о положениях исполнительных механизмов и внешние данные, включающие в себя первую частоту N1 вращения вала упомянутого компрессора низкого давления, вторую частоту N2 вращения упомянутого компрессора высокого давления, давление P ниже по потоку от компрессоров, расход W топлива и команду u для исполнительных механизмов.
Таким образом, способ служит для обнаружения с упреждением любого дрейфа схемы регулятора клапана посредством наблюдения за вариацией очень небольшого количества параметров.
В этом примере способ содержит следующие этапы:
• определение дискретного авторегрессионного фильтра стационарного режима для моделирования поведения выходной переменной в настоящий момент y(t), соответствующей текущим положениям исполнительных механизмов, в зависимости от выходных переменных в предыдущие моменты y(s; s < t), соответствующие более ранним положениям исполнительных механизмов, и в зависимости от входных переменных

соответствующих упомянутым внешним данным в прошлые и настоящий моменты, упомянутый авторегрессионный фильтр выражается в частотном спектре w рациональным фильтром  полиномиальных дробей, имеющих вид:
полиномиальных дробей, имеющих вид:
где

и

• сбор начальных цифровых данных, представляющих начальные входные и выходные переменные  , измеренные и сохраненные в течение стадий стендовых испытаний;
, измеренные и сохраненные в течение стадий стендовых испытаний;
• идентификацию режимов полета по упомянутым начальным цифровым данным;
• расчет, для каждого режима полета, оптимального набора рангов rj и r0 упомянутых полиномиальных дробей упомянутого рационального фильтра  ; и
; и
• расчет, для каждого режима полета, эталонного рационального фильтра  .
.
Это дает возможность строить модель поведения, которая эффективна и очень легка для реализации. В дополнение, выбор оптимального набора рангов оптимизирует правдоподобие модели поведения, а также ее устойчивость.
Способ также включает в себя следующие этапы:
• сохранение со временем цифровых измерений, представляющих входные и выходные переменные (x(s),y(s)), в буфере памяти для формирования выборки N измерений:

• испытание стабильности упомянутой выборки N измерений;
• идентификацию текущего режима полета и оценку качества его классификации
• оценку текущего рационального фильтра  для оптимального набора рангов, связанного с упомянутым режимом полета;
для оптимального набора рангов, связанного с упомянутым режимом полета;
• сравнение упомянутого текущего рационального фильтра  с эталонным рациональным фильтром
с эталонным рациональным фильтром  , соответствующим одному и тому же режиму полета; и
, соответствующим одному и тому же режиму полета; и
• указание аномалии поведения упомянутой схемы регулятора, когда разница между упомянутым текущим рациональным фильтром  и упомянутым эталонным рациональным фильтром
и упомянутым эталонным рациональным фильтром  является большей, чем предопределенное значение.
является большей, чем предопределенное значение.
Это дает возможность обнаруживать аномалию двигателя только посредством наблюдения за вариациями положений исполнительных механизмов в зависимости от внешних условий и в зависимости от входных сигналов команд клапана.
Согласно аспекту способа по настоящему изобретению сравнение между упомянутым текущим и эталонным рациональными фильтрами  и
и  содержит следующие этапы:
содержит следующие этапы:
• расчет эталонной среднеквадратической ошибки MSE0 между выходной переменной, представляющей реальное положение исполнительных механизмов, которое измерено в течение стадий стендовых испытаний, и соответствующей выходной переменной, представляющей положение исполнительных механизмов, которое оценено упомянутым текущим эталонным рациональным фильтром  ;
;
• расчет текущей среднеквадратической ошибки MSE между текущей выходной переменной, представляющей реальное положение исполнительных механизмов, измеренное в течение измерений в реальном времени, и соответствующей выходной переменной, представляющей положение исполнительных механизмов, оцененное упомянутым текущим рациональным фильтром  ;
;
• расчет разности, определенной отношением e 0 упомянутой текущей среднеквадратической ошибки MSE и упомянутой эталонной среднеквадратической ошибки MSE0:
 ; и
; и
• указание аномалии, когда упомянутое отношение e 0 является большим, чем предопределенное значение.
Согласно еще одному аспекту способа по настоящему изобретению, сравнение между упомянутым текущим и эталонным рациональными фильтрами  и содержит следующие этапы:
и содержит следующие этапы:
• расчета последовательности  локальных индикаторов e
j взвешенным интегрированием посредством упомянутых текущего и эталонного рациональных фильтров
локальных индикаторов e
j взвешенным интегрированием посредством упомянутых текущего и эталонного рациональных фильтров  и
и  на полосе пропускания частот каждой входной переменной xj(t):
на полосе пропускания частот каждой входной переменной xj(t):

причем

и

• расчет последовательности  локальных количественных показателей
локальных количественных показателей  с использованием технологии корреляции между упомянутыми локальными индикаторами e
j, где
с использованием технологии корреляции между упомянутыми локальными индикаторами e
j, где  - оценка между локальным индикатором e
j и другими локальными индикаторами:
- оценка между локальным индикатором e
j и другими локальными индикаторами:

причем c j,i являются коэффициентами регрессии;
• расчет глобального количественного показателя Z2 с использованием расстояния Махаланобиса:

где  - среднее значение z, рассчитанное в течение стадий стендовых испытаний с ковариационной матрицей Σ;
- среднее значение z, рассчитанное в течение стадий стендовых испытаний с ковариационной матрицей Σ;
• расчет финального количественного показателя  умножением глобального количественного показателя Z2 на показатель качества классификации режима полета,
умножением глобального количественного показателя Z2 на показатель качества классификации режима полета,  ; и
; и
• указание предупредительного сигнала аномалии поведения, когда значение финального количественного показателя  превышает предопределенное значение.
превышает предопределенное значение.
Изобретение также предлагает систему для обнаружения аномалий в авиационном двигателе, система содержит:
• средство для определения модели поведения средства управления упомянутого авиационного двигателя посредством использования временной регрессии, которая моделирует поведение упомянутого средства управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и команд упомянутого средства управления;
• средство для непрерывного перерасчета упомянутой модели поведения для каждого нового набора данных; и
• средство для контроля статистической вариации упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства управления, представляющую аномалию работы упомянутого двигателя.
Изобретение также предусматривает компьютерную программу, включающую в себя команды для реализации способа обнаружения согласно вышеприведенным этапам, когда выполняется средством процессора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества устройства и способа по изобретению лучше проявляются по прочтении последующего описания, приведенного в качестве неограничивающего указания и со ссылкой на прилагаемые чертежи, на которых:
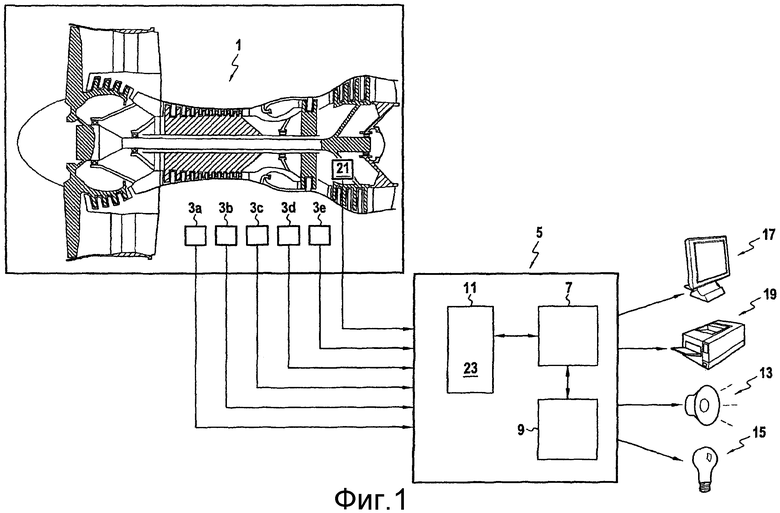
• фиг. 1 - вид в перспективе аппаратных средств, реализованных в системе или способе по изобретению, которые пригодны для использования при обнаружении аномалий в авиационном двигателе;
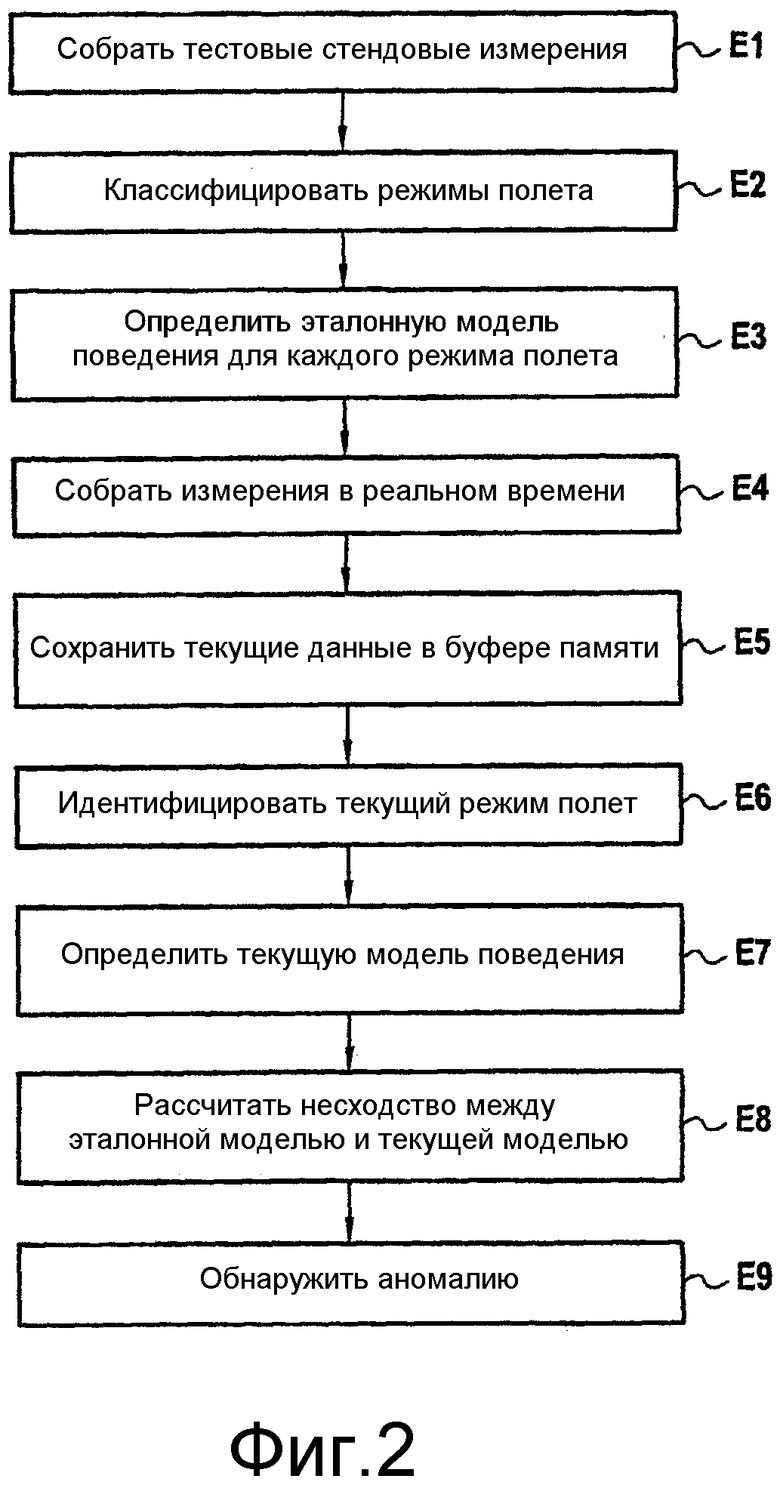
• фиг. 2 - блок-схема последовательности операций способа, показывающая основные этапы при обнаружении аномалии в авиационном двигателе по фиг. 1;
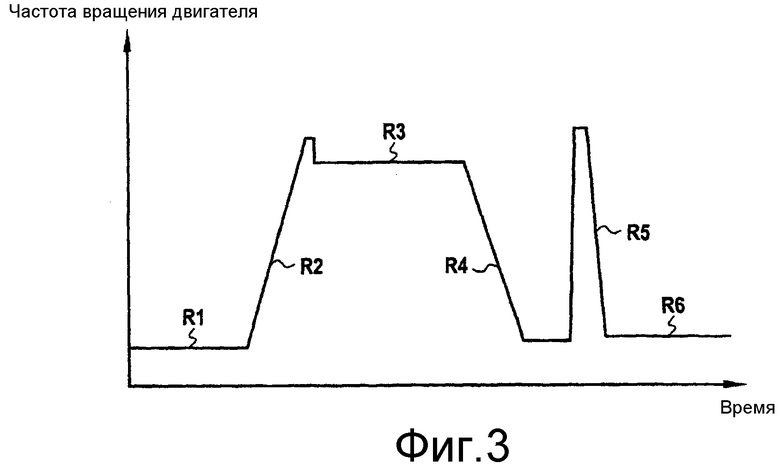
• фиг. 3 - схема, показывающая пример режимов полета для авиационного двигателя по фиг. 1;
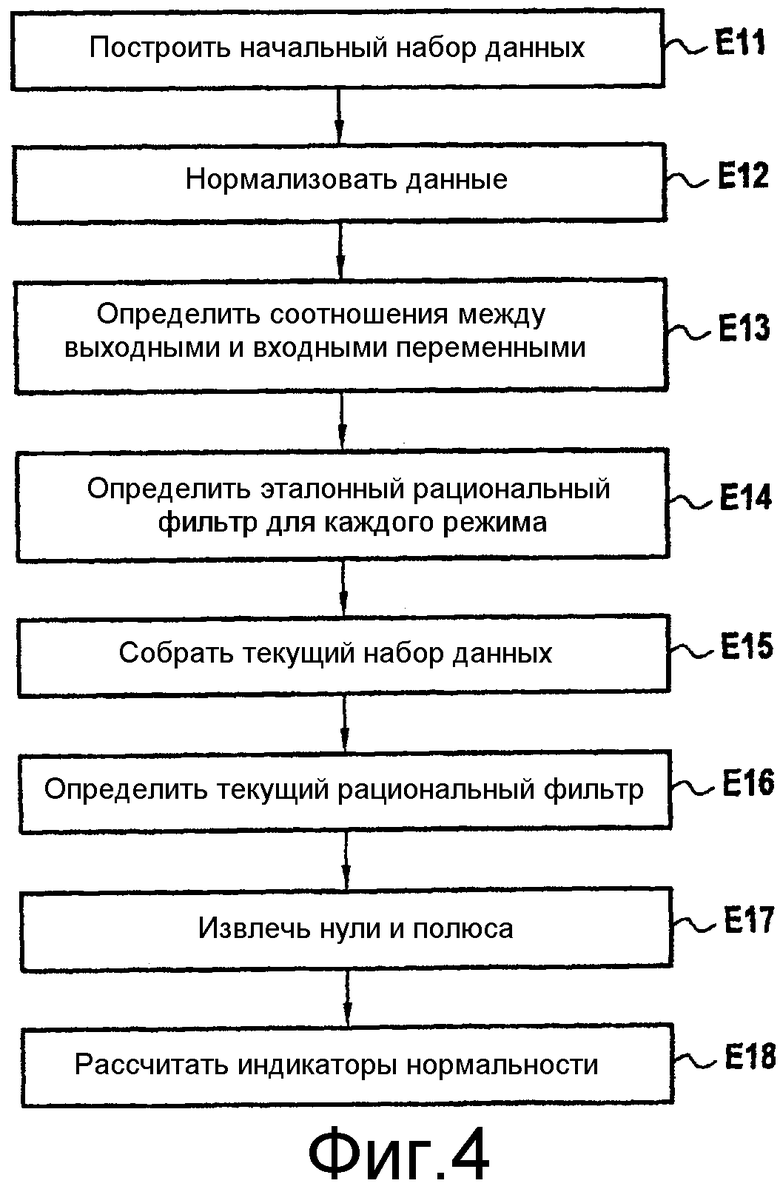
• фиг. 4 - блок-схема последовательности операций способа, показывающая основные этапы при моделировании поведения средства для контроля авиационного двигателя рациональным фильтром по изобретению;
• фиг. 5 - крайне схематический вид примера системы детектора по изобретению для схемы регулятора авиационного двигателя; и
• фиг. 6A и 6B показывают основные этапы для моделирования поведения схемы регулятора по фиг. 5.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 показывает аппаратные средства, реализованные в системе или способе по изобретению для обнаружения аномалий в авиационном двигателе или турбореактивном двигателе 1. Система включает в себя множество датчиков 3a-3e для измерения сигналов управления или данных, представляющих состояние двигателя 1, вместе с внешними или внутренними контекстными данными, которые могли оказывать влияние на работу двигателя 1. Система также имеет средство 5 процессора данных, такое как компьютер или контроллер, пригодный для использования при выполнении компьютерной программы, предназначенной для реализации способа по изобретению. Средство 5 процессора содержит аппаратные средства, которые обычно должны обнаруживаться в компьютере. Более подробно, средство 5 процессора содержит центральный блок 7, который выполняет последовательности команд программы способа по изобретению, центральную память 9, которая хранит данные и программы, являющиеся выполняемыми, средство или носители 11 цифрового хранения данных, которые сохраняют данные, периферийные устройства ввода (датчики 3a-3f, клавиатуру, мышь, ...) и периферийные устройства вывода (излучатели 13 звука, светофоры 15, экран 17, принтер 19,...), чтобы делать доступным результат обнаружения.
Изобретение полагается на обнаружение аномалии в поведении двигателя 1 и, в частности, при обнаружении аномалии поведения средства 21 управления или регулятора двигателя 1, которое представляет аномалию в работе двигателя 1.
В соответствии с изобретением средство 5 процессора сконфигурировано для определения модели поведения для средства 21 управления авиационного двигателя 1 в качестве временной регрессии. Поведение средства 21 управления может моделироваться в зависимости от набора данных, относящегося к средству 21 управления и содержащего измерения прошлых поведений и измерения команд и/или состояний средства 21 управления.
Более того, средство 5 процессора сконфигурировано для перерасчета этой модели поведения на непрерывной основе для каждого нового набора данных и для контроля статистической вариации модели поведения, для того чтобы обнаруживать аномалию средства 21 управления. В частности, для того чтобы содействовать перерасчету, полезно выражать поведение во времени средства 21 управления регрессионной дискретной моделью, реализующей неизменную стохастическую формулировку.
Фиг. 2 показывает основные этапы способа по изобретению для обнаружения аномалии авиационного двигателя 1. Должно наблюдаться, что этим этапы реализуются средством 5 процессора системы детектора по изобретению.
Этапы с E1 по E3 относятся к определению модели поведения в зависимости от измерения прошлых поведений и измерений команд и состояний средства 21 управления.
Этапы с E4 по E7 относятся к перерасчету модели поведения со временем для каждого нового измерения.
Этапы E8 и E9 относятся к измерению вариации модели поведения и служат для обнаружения аномалии средства 21 управления.
В частности, на этапе E1, средство 5 процессора сконфигурировано для сбора начального набора данных, относящегося к средству 21 управления и соответствующего к данным, которые измеряются и сохраняются на запоминающих носителях 11 в течение стадий стендовых испытаний.
На этапе E2 средство 5 процессора сконфигурировано для разбиения этого начального набора данных на множество одинаковых интервалов, представляющих интервалы, которые подобны наблюдаемым во время реальных режимов полета. Различные режимы полета могут идентифицироваться множеством индикаторов режима, определенных с использованием критериев, которые заданы экспертами.
Этот выбор или разбиение могут достигаться при применении определения, предоставленного экспертами, которые предлагают вероятностные индикаторы для каждой из этих стадий. Таким образом, эти индикаторы дают указание касательно вероятности нахождения в заданном режиме полета для каждого из идентифицированных режимов. Режим FR полета, который наиболее вероятен, затем может допускаться при применении показателя или критерия  качества классификации, определенного пороговым значением вероятности на индикаторах.
качества классификации, определенного пороговым значением вероятности на индикаторах.
Фиг. 3 - схема, показывающая пример режимов полета, определенных в зависимости от частоты вращения двигателя. В этом примере стабильные режимы полета содержат стадии малого газа на земле, R1 и R6 (режим земного малого газа), и стадию R3 крейсерского полета. Стационарные (неизменные) интервалы или стадии определяются квазистационарными измерениями частоты вращения двигателя. Переходные стадии, такие как ускорение во время взлета, R2, замедление во время снижения, R4, или обратной тяги, R5, не являются стационарными стадиями, а потому не могут использоваться для моделирования стационарного стохастического процесса.
Более того, режимы полета могут идентифицироваться по существу тремя индикаторами режима: минимальной длительностью интервала, эталонным значением, указывающим, что интервал образует часть специального класса режима полета, и значением допуска. Должно быть отмечено, что при условии, что эта классификация выполняется по существу на земле, необязательно включать в состав другие параметры, такие как высота над уровнем моря или пространственная ориентация самолета.
На этапе E3 средство 5 процессора сконфигурировано для определения эталонной модели поведения для каждого режима полета, пригодного для предсказания поведения средства 21 управления, в зависимости от прошлых поведений и в зависимости от других измерений, как прошлых, так и настоящих.
После этого эталонные модели поведения применяются в реальном времени.
Таким образом, на этапе E4, средство 5 процессора начинает собирать со временем текущий набор данных, относящийся к средству 21 управления. Эти данные, например, приходят с различных датчиков 3a-3e, считывающих условия эксплуатации двигателя 1.
На этапе E5 средство 5 процессора сконфигурировано для сохранения содержимого текущего набора данных за предопределенный период времени в буфере 23 памяти, например, содержащемся в средстве 11 хранения.
На этапе E6 средство 5 процессора сконфигурировано для использования текущего набора данных для расчета оценки индикаторов режима, чтобы идентифицировать текущий режим полета, специфичный предопределенному периоду времени. Если текущий режим полета идентифицирован, то способ переходит на следующий этап E7, иначе продолжают собираться новые данные.
Когда идентифицирован текущий режим полета, средство 5 процессора сконфигурировано в течение этапа E7 рассчитывать текущую модель поведения, соответствующую текущему набору данных и текущему режиму полета. Текущая модель поведения рассчитывается с использованием определения по этапу E3, относящегося к эталонной модели поведения, соответствующей тому же самому режиму полета.
На этапе E8 средство 5 процессора сконфигурировано для оценки несходства поведения между текущей моделью поведения и эталонной моделью поведения, соответствующими одному и тому же режиму полета.
Затем, на этапе E9, средство 5 процессора сконфигурировано для обнаружения аномалии поведения средства 21 управления, когда упомянутое несходство поведений является большим, чем предопределенное пороговое значение нормальности.
В качестве примера, поведение средства 21 управления может моделироваться рациональным фильтром на основании линейных или нелинейных рациональных функций. В частности, рациональный фильтр может быть весьма эффективным при моделировании авторегрессионного стационарного процесса.
Фиг. 4 показывает основные этапы для моделирования поведения средства 21 управления рациональным фильтром.
На этапе E11 средство 5 процессора сконфигурировано для построения начального набора данных, соответствующего цифровым данным, измеренным и сохраненным в течение стадий стендовых испытаний средства 21 управления для каждого режима полета, для того чтобы калибровать рациональный фильтр.
На этапе E12 средство 5 процессора сконфигурировано для нормализации этих цифровых данных вычитанием фильтра нижних частот и нормирования относительно локального разброса, оцененного для каждого режима полета.
На этапе E13 средство 5 процессора сконфигурировано для определения множества математических формул. Каждая формула, например, может выражать выходной вектор y(t) в настоящий момент t, представляющий текущее поведение средства 21 управления в зависимости от выходных векторов y(t-i) в предыдущие моменты (то есть моменты t-1,..., t-i,..., 0), представляющих более раннее поведение измерений, и в зависимости от выходных векторов, содержащих текущий входной вектор в настоящий момент x(t), и входных векторов x(t-i) в предыдущие моменты. Каждый входной вектор x (текущий или предыдущий) может быть построен конкатенацией (текущих или предыдущих) измерений команд и состояний средства 21 управления.
В качестве примера, каждая математическая формула может соответствовать соотношению между выходными векторами y и входными векторами x, описанными аналитически во временной области линейным уравнением, имеющим форму:

где A(q) - вещественный полином, в котором член наивысшей степени равен 1, вида:

а B(q) - вещественный полином, в котором каждый коэффициент является линейным вектором такой же размерности, как входной вектор x, имеющим форму:

где q-1 - оператор задержки, определенный посредством:

Эти полиномы могут быть уникально идентифицированы их корнями (нулями и полюсами) на комплексной плоскости.
На этапе E14 средство 5 процессора сконфигурировано для использования множества математических формул для определения эталонного рационального фильтра (соответствующего эталонной модели поведения) для каждого режима полета.
Первый этап калибровки рационального фильтра состоит в определении рангов полиномов A(q) и B(q). Необходимо выбираться значению для степени полинома A(q), а также для степени каждого полинома, определенного B(q), и для каждой из отслеживаемых переменных.
Поскольку правдоподобие модели естественно повышается с количеством параметров, используемых моделью, в таком случае полезно использовать критерий компенсации, который дает возможность эффективно контролировать качество оцененной модели и ее устойчивость.
Коэффициенты полиномов могут рассчитываться традиционной технологией интерполяции и предсказания посредством выполнения регрессии на значениях, измеренных в течение процедуры моделирования, удовлетворяющих авторегрессионным уравнениям. Для выбора рангов эти регрессионные технологии применяются к большому объему данных, тем самым давая возможность одновременно оценивать коэффициент полиномов, оценивать правдоподобие компенсации и проверять устойчивость модели поведения. Устойчивость является мерой качества модели, которая выполняется на данных, которые не использовались для оценивания коэффициентов модели поведения.
Ранги, которые удерживаются для авторегрессионных линейных уравнений, являются такими, что оптимизируют правдоподобие модели поведения и ее устойчивость согласно критериям, определенным посредством экспертизы.
Как только рациональный фильтр был калиброван, он пригоден для применения в реальном времени. Таким образом, на этапе E15, средство 5 процессора сконфигурировано для действия со временем, чтобы собирать и сохранять в памяти 23 буфера текущий набор данных, относящийся к средству 21 управления.
Преимущественно буфер 23 памяти имеет фиксированный размер, определенный с помощью рангов, оцененных на предыдущем этапе, и минимального объема данных, необходимых для идентификации режима полета, и для применения регрессионных технологий, необходимых для расчета коэффициентов полиномов A(q) и B(q). Буфер 23 памяти может работать в качестве скользящего буфера, из условия чтобы самые старые данные уничтожались, с тем чтобы освобождать пространство для новых измерений.
В каждый момент оцениваются индикаторы режима полета. Эта оценка должна приводить к одному из режимов полета, принимаемого на всем протяжении периода измерений, сохраненных в буфере 23 памяти. Если специфичный режим идентифицирован, то способ переходит на следующий этап E16.
На этапе E16, как только текущий режим был идентифицирован, средство 5 процессора сконфигурировано для использования множества математических формул, чтобы рассчитывать текущий рациональный фильтр (соответствующий текущей модели поведения), относящийся к текущему набору данных и к текущему режиму полета.
Выбор или расчет текущего рационального фильтра включает в себя приближенное выражение нормализации, соответствующей текущему режиму полета, выполнение технологии обучения авторегрессионной модели. Эта калибровка выполняется на данных буфера 23 памяти, для того чтобы выводить выражения из них для полиномов A(q) и B(q) посредством использования способа адаптации коэффициентов, которые рассчитаны ранее во время калибровки на земле. Иногда возможно, чтобы некоторые из рассчитанных коэффициентов были малодостоверными. При таких обстоятельствах способ переходит непосредственно на следующий этап E17.
Линейный рациональный фильтр не может быть определен уникальными индикаторами (нулями и полюсами), которые более стабильны, чем коэффициенты полиномов.
На этапе E17 средство 5 процессора сконфигурировано, для каждого режима полета, получать текущие нули (корни B(q)) и полюса (корни A(q)) на комплексной плоскости у полиномов A(q) и B(q), связанных с текущим рациональным фильтром. После предварительной обработки, служащей для сохранения только вещественных величин (например, модуля и фазы пары комплексно-сопряженных нулей), эти текущие нули и полюса сохраняются в таблице (например, хранимой в средстве 11 хранения) вместе с другой информацией, представляющей контекст сбора данных, относящийся к средству 21 управления двигателя 1 (например, наружной температуры, давления, высоты самолета над уровнем моря и т.д.).
Таблицы, которые созданы этим способом для каждого режима полета, могут использоваться процедурой калибровки (описанной ниже), которая дает возможность определять распределение коэффициентов, что ведет к определению пороговых значений нормальности (то есть испытаниям непринятия нормальности для средства 21 управления), например, в соответствии с экспертными критериями.
В случае индикатора нормальности, рассчитанного в качестве правдоподобия при обычных допущениях для полюсов и нулей, пересечение одного из этих пороговых значений нормальности вызывает выдачу предупредительного сигнала аномалии. Логика решений, в таком случае, может быть реализована, для того чтобы управлять возникновением этих событий, и чтобы управлять аварийными сигналами.
Должно быть отмечено, что, после расчета и сохранения нулей и полюсов рационального фильтра со временем для специфического режима полета, процедура калибровки изначально состоит в применении исправления в отношении каждого коэффициента регрессией на контекстных измерениях и на других коэффициентах, для того чтобы освобождались от контекста сбора данных.
После этого отклонение по отношению к регрессионному рациональному фильтру моделируется посредством оценки распределения вектора исправленных коэффициентов, рассматриваемого как единое целое. Например, можно использовать размещение T-квадрат в качестве модели для оценивания распределения.
Параметры этой модели распределения оцениваются на последовательности данных, которая считается нормальной экспертами. Пороговые значения нормальности определены в качестве являющихся количествами в этом распределении. Эта модель дает возможность проводить различие между тем, которое появляется в качестве обычного шума, и изменением поведения средства 21 управления.
Таким образом, для того чтобы обнаруживать аномалию, если таковая имеет место, для текущего режима полета, средство 5 процессора сконфигурировано на этапе E18 вычислять индикаторы нормальности на основе экспертных критериев и по текущим нулям и полюсам, а также из другой информации, представляющей контекст сбора данных, относящийся к средству 21 управления. Средство 5 процессора затем может обнаруживать аномалию в поведении средства 21 управления, когда несходство между индикаторами нормальности и соответствующим пороговым значением нормальности является большим, чем предопределенное значение.
Должно быть отмечено, что также можно оценивать несходство с использованием функции, приспособленной к динамическому диапазону средства 21 управления, без использования нулей и полюсов, например, пользуясь вариацией остаточной энергии. При таких условиях аномалия поведения в средстве 21 управления может обнаруживаться, когда несходство между эталонным рациональным фильтром и текущим рациональным фильтром является большим, чем предопределенное значение.
В примере по настоящему изобретению средство 21 управления соответствует схеме регулятора, которая приводит в действие исполнительные механизмы, которые управляют статорными клапанами в компрессорах турбореактивного двигателя.
Фиг. 5 - крайне схематическое изображение примера системы детектора по изобретению, включающей в себя схему 21a регулятора (начерченную непрерывными линиями) и контур 21b сервоуправления (начерченный пунктирными линиями), для того чтобы обнаруживать аномалию работы статорных клапанов 25a, 25b в осевых компрессорах 27a, 27b турбореактивного двигателя 1.
Вообще турбореактивный двигатель 1 имеет компрессор 27a низкого давления (LP) выше по потоку и компрессор 27b высокого давления (HP) ниже по потоку.
Более того, статорные клапаны 25a, 25b служат для модификации геометрии компрессора 27a, 27b в зависимости от режима полета, внешних условий и командных входных сигналов. Они управляются замкнутой схемой 21a регулятора, которая приводит в действие два исполнительных механизма 29 (например, гидравлические исполнительные механизмы), которые соединены вместе. Естественно, исполнительные механизмы 29, с тем же успехом, могли бы быть электромеханическими или электрическими.
Таким образом, в этом примере, средство 21 управления соответствует схеме 21a регулятора, которая приводит в действие исполнительные механизмы 29, и которая моделируется контуром 21b сервоуправления, который включает в себя рациональный фильтр 31.
Положение или перемещение y на выпусках исполнительных механизмов 29 измеряется датчиком 3a положения с линейно регулируемым дифференциальным трансформатором (LVDT). Исполнительные механизмы 29 управляются входной командой u, выработанной пропорционально-интегрально-дифференциальным (ПИД, PID) регулятором 33.
Входная команда u определяется уставкой 35 в зависимости от запроса мощности пилотирования, скорректированного с помощью арифметического оператора 37 посредством командного значения, переданного автономным цифровым электронным регулятором 39 режимов работы двигателя (FADEC). FADEC 39 рассчитывает командное значение в зависимости от положения y выпуска исполнительных механизмов, которое измеряется датчиком 3a положения с LVDT.
Более того, в дополнение к измерению u команды и измерению y положения относительно исполнительных механизмов 29, система учитывает другие измерения, относящиеся к условиям эксплуатации двигателя 1. Таким образом, система имеет датчики 3b-3e для измерения, соответственно, частоты вращения, N1, вала компрессора низкого давления, частоты вращения, N2, вала компрессора высокого давления, давления P ниже по потоку от компрессоров и расхода W топлива.
Таким образом, контур 21b сервоуправления показывает, что рациональный фильтр 31 моделирует положение 
Должно быть отмечено, что со знанием следующих параметров гидравлического исполнительного механизма: объема V цилиндра, площади A поршня, плотности ρ флюида, модуля κ объемного сжатия флюида, приведенной массы m нагрузки, жесткости K нагрузки и демпфирования c, а также некоторых измерений внешней и внутренней утечки L, можно определять соотношение между командой u и положением y исполнительного механизма 29 посредством аналитической формулы, которая непрерывна во времени t, как изложено ниже:

Это временное представление между положением y исполнительного механизма 29 и входной командой u для исполнительного механизма 29 иллюстрирует поведение схемы 21b регулятора и может приемлемо приближенно выражаться дискретным авторегрессионным фильтром стационарного режима. Цифровая регрессия может быть выражена стохастическим уравнением, которое дискретно во времени, как изложено ниже:

Переменные xj группируют вместе все из k внешних входных сигналов, содержащих входную команду u, измерения условий эксплуатации двигателя 1 и, возможно, также другие контекстные измерения, относящиеся к схеме 21a регулятора. Это дискретное уравнение может быть выражено векторным образом вида:
ay = bx
посредством записи

и
Параметры a и b векторов являются параметрами состояния, поскольку они описывают соотношение между контекстом, командой и положением.
Таким образом, дискретный регрессионный фильтр стационарного состояния служит для моделирования поведения выходной переменной в настоящий момент y(t), соответствующий текущему положению исполнительных механизмов 29, в зависимости от выходных переменных в предыдущие моменты y(s; s < t), соответствующие более ранним положениям исполнительных механизмов 29, и в зависимости от входных переменных  , соответствующих внешним данным в настоящий и предыдущие моменты. Этот авторегрессионный фильтр может быть выражен в частотном спектре w рациональным фильтром
, соответствующих внешним данным в настоящий и предыдущие моменты. Этот авторегрессионный фильтр может быть выражен в частотном спектре w рациональным фильтром  31 полиномиальных дробей, имеющих вид:
31 полиномиальных дробей, имеющих вид:
где

и

Хороший критерий для испытания стабильности модели, например, соответствует измерению среднеквадратической ошибки (MSE) для некоторого количества N отсчетов выборки между измеренным реальным положением y(t) исполнительных механизмов 29 и положением  исполнительных механизмов 29, которое оценено фильтром с использованием следующей формулы:
исполнительных механизмов 29, которое оценено фильтром с использованием следующей формулы:
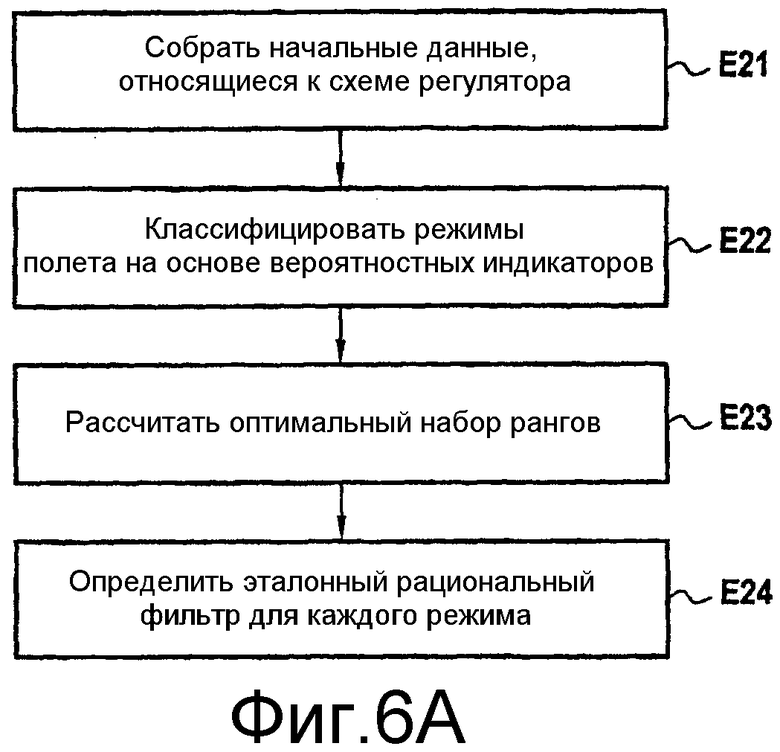
Фиг. 6A и 6B показывают основные этапы для моделирования поведения схемы 21a регулятора рациональным фильтром 31.
Должно быть отмечено, что эти чертежи и предыдущие чертежи также являются иллюстрациями основных значений системы по изобретению для обнаружения аномалий авиационного двигателя 1.
Более подробно, фиг. 6A показывает калибровку рационального фильтра 31 во время измерений на земле.
На этапе E21 средство 5 процессора сконфигурировано для контроля работы двигателя 1, для того чтобы собирать начальные цифровые данные, представляющие начальные входные и выходные переменные  , которые измеряются и сохраняются во время стадий стендовых испытаний.
, которые измеряются и сохраняются во время стадий стендовых испытаний.
Эти начальные цифровые данные служат для идентификации или классификации режимов полета и для определения параметров полиномов.
Таким образом, на этапе E22, средство 5 процессора сконфигурировано для классификации режимов полета с использованием вероятностных индикаторов (которые предложены экспертами) для каждой из этих стадий.
На этапе E23, после классификации режимов полета, средство 5 процессора сконфигурировано для использования регрессионных технологий для каждого режима полета, чтобы рассчитывать оптимальный набор рангов rj и r0 полиномиальных дробей, связанных с рациональным фильтром  31. Это может давать средству 5 процессора на этапе E24 возможность определять, для каждого режима полета, эталонный рациональный фильтр
31. Это может давать средству 5 процессора на этапе E24 возможность определять, для каждого режима полета, эталонный рациональный фильтр  , который служит для предсказания выходных положений приводных механизмов 29 в зависимости от предыдущих положений и в зависимости от других прошлых и настоящего измерений.
, который служит для предсказания выходных положений приводных механизмов 29 в зависимости от предыдущих положений и в зависимости от других прошлых и настоящего измерений.
Более подробно (что касается этапов E23 и E24), данные, соответствующие каждому режиму полета, сначала нормируются посредством использования внешней контекстной информации, например, содержащей среднюю частоту вращения.
После нормирования цифровых данных можно строить входной вектор  конкатенацией измерений, содержащих: частоты вращения N1 и N2 валов компрессоров, давление P ниже по потоку от компрессоров, расход W топлива и команду u клапана. Должно быть отмечено, что внешние измерения, относящиеся к частотам вращения, дают большую устойчивость контекстным вариациям.
конкатенацией измерений, содержащих: частоты вращения N1 и N2 валов компрессоров, давление P ниже по потоку от компрессоров, расход W топлива и команду u клапана. Должно быть отмечено, что внешние измерения, относящиеся к частотам вращения, дают большую устойчивость контекстным вариациям.
После этого, для каждого режима полета, рассчитываются ранги посредством оптимизации модели с использованием критерия максимального правдоподобия. Можно использовать информационный критерий Акайке (AIC), который пригоден для сравнения моделей разных размеров, для того чтобы находить оптимальный размер для модели. Критерий AIC служит для компенсации логарифмического правдоподобия log(L) в среднеквадратической ошибке MSE количеством оцененных параметров d с использованием следующих формул:
и

Минимизация критерия AIC, в таком случае, соответствует минимизации среднеквадратической ошибки (MSE) и минимизации количества оцениваемых параметров.
Преимущественно, для того чтобы определить модель, которая устойчива относительно новых данных, осуществляется использование испытания устойчивости компенсированного правдоподобия. Это испытание оценивает качество модели на данных, которые не использовались для калибровки модели. Таким образом, для того чтобы испытать модель данного ранга
где  и
и  на выборке размера N, модель калибрована на первой части выборки (например, на 80% размера выборки), и она испытывается на оставшейся части.
на выборке размера N, модель калибрована на первой части выборки (например, на 80% размера выборки), и она испытывается на оставшейся части.
Это испытание устойчивости дает правдоподобие, которое специфично этому выбору рангов, при которых MSE рассчитывается на участке сигнала, который не использовался для калибровки. Следовательно, можно модифицировать критерий AIC, так что нормирование применяется к выборке размера N, для того чтобы сохранять значение, которое является постоянным и непротиворечивым. После устранения постоянных частей получается критерий αλ(r), который настраивается посредством параметра λ регуляризации, имеющего следующую форму:

Следовательно, для того чтобы выбрать ранги, способ начинается с r0 = (1,..., 0), и рассчитывается критерий α0 = αλ(r0), такой критерий равен log(σ2) ≈ 0, поскольку y нормирован (σ = 1), и сигнал оценивается его средним значением (μ = 0). После этого, для каждого компонента j из r, новый набор рангов испытывается добавлением 1 к j-му рангу. Следующий набора рангов r1 соответствует набору, который минимизирует α(r). Как результат, последовательность (αn)n=0 уменьшается до тех пор, пока не получено минимальное значение, которое соответствует наилучшему выбору для набора рангов касательно рационального фильтра 31.
После выбора оптимального набора рангов, затем, параметры фильтра 31 рассчитываются традиционным регрессионным способом, на этот раз, с использованием всех калибровочных сигналов. Это дает возможность, для каждого режима полета, получать эталонный рациональный фильтр  в зависимости от эталонных полиномов
в зависимости от эталонных полиномов  и
и  , как изложено ниже:
, как изложено ниже:
Должно быть отмечено, что технология временной регрессии дает возможность получать грубую оценку для положений y(t) исполнительных механизмов. Преимущественно, модель может улучшаться стабилизацией способа поблизости от фиксированной точки.
Тем не менее, грубой оценки этих параметров достаточно, поскольку полезнее знать тенденции состояний, чем качество регрессии. Более того, точная модель может легко становиться чрезмерно параметризованной, приводя к модели поведения, подвергаемой изменениям и настройкам, которые быстры и неожиданны, вследствие вариаций, которые являются нелокальными.
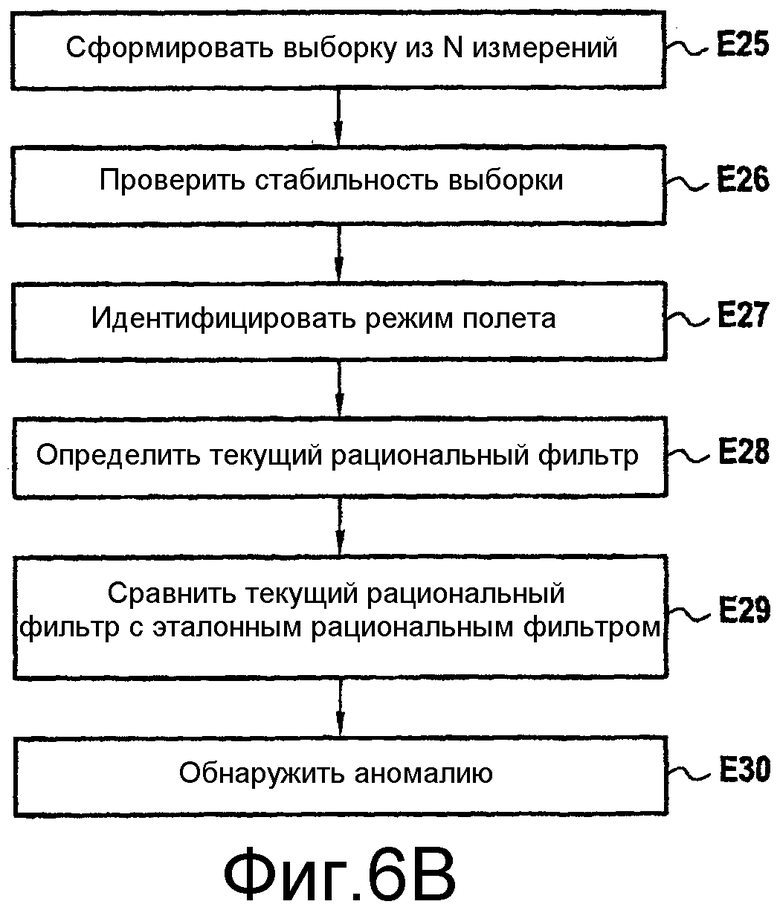
Фиг. 6B показывает основные этапы контроля вариации рационального фильтра.
После того как режимы полета были идентифицированы, новый рациональный фильтр периодически рассчитывает, и временной сигнал (a(n), b(n)) с многими переменными достигается для каждого режима полета. Индекс n времени соответствует периодическим наблюдениям
Индекс n времени также может представлять номер полета для долгосрочного технического обслуживания. На практике, для каждого индекса n времени, новая оценка параметров рассчитывается в течение временного интервала It(n) около t(n).
Таким образом, назначение контроля схемы 21a регулятора в действии состоит в том, чтобы обнаруживать аномалии схемы, контролируя вариацию параметров (a(n), b(n)) состояния.
Более точно, после того как были определены эталонные фильтры  , средство 5 процессора начинает с записи измерений со временем t(n) (часто записываемым t для большей краткости).
, средство 5 процессора начинает с записи измерений со временем t(n) (часто записываемым t для большей краткости).
На этапе E25 цифровые измерения, представляющие входные и выходные переменные (x(s), y(s)), сохраняются в течение моментов t времени в буфере 23 памяти предопределенной емкости, с тем чтобы формировать интервал или выборку, занимающую N измерений:

На этапе E26 средство 5 процессора сконфигурировано для проверки стабильности выборки N измерений в каждый периодический момент t(n)=nΔt (где Δt - предопределенная длительность, которая зависит от быстроты расчетов средства 5 процессора).
На этапе E27, когда выборка N измерений стабильна, средство 5 процессора сконфигурировано для идентификации текущего режима полета. В случае стабильности наиболее вероятный текущий режим полета идентифицируется и оценивается качество его классификации:
На этапе E28 средство 5 процессора сконфигурировано для оценки текущего рационального фильтра  для оптимального набора рангов, связанных с текущим режимом полета, идентифицированным на этапе E27.
для оптимального набора рангов, связанных с текущим режимом полета, идентифицированным на этапе E27.
На этапе E29 средство 5 процессора сконфигурировано для сравнения текущего полинома  , рассчитанного на этапе E28, с эталонным рациональным фильтром
, рассчитанного на этапе E28, с эталонным рациональным фильтром  , соответствующим такому же режиму полета, как рассчитанный на этапе E24.
, соответствующим такому же режиму полета, как рассчитанный на этапе E24.
На этапе E30 средство 5 процессора сконфигурировано для указания, что есть аномалия в поведении схемы 21a регулятора, когда разность между текущим рациональным фильтром  и эталонным рациональным фильтром
и эталонным рациональным фильтром  является большей, чем предопределенное значение.
является большей, чем предопределенное значение.
Разность (отклонение) или несходство между двумя рациональными фильтрами может рассчитываться по нулям и полюсам полиномов и, возможно, по другой информации, представляющей контекст сборка данных, относящийся к схеме 21a регулятора.
Нули (корни Bj) и полюса (корни A) являются уникальными характеристиками рациональных фильтров. Таким образом, статистическая вариация этих корней может отслеживаться, для того чтобы быть способным обнаруживать аномалию в поведении схемы 21a регулятора. Некоторые из корней могут быть комплексными, однако все из полиномов являются вещественными и, при таких условиях, для каждого комплексного корня, существует комплексно-сопряженный корень, и, соответственно, можно принимать во внимание только вещественные части и мнимые части, которые положительны. Эксперты могут определять индикаторы из конкретных комбинаций этих корней, служащие для идентификации аномалии.
Должно быть отмечено, что, в отсутствие экспертных критериев, также можно рассчитывать индикаторы автоматически.
Также должно быть отмечено, что, когда полином представлен всеми из своих корней, можно управлять поведением схемы 21a регулятора на полном спектре входных сигналов. Однако может быть более полезным управлять поведением модели вокруг нескольких специфических частот, которые являются реально поддающимися интерпретации.
Первая технология для сравнения между текущим рациональным фильтром  и эталонным рациональным фильтром
и эталонным рациональным фильтром  состоит в оценивании стохастической разности между двумя фильтрами.
состоит в оценивании стохастической разности между двумя фильтрами.
В качестве примера, средство 5 процессора может быть сконфигурировано для расчета среднеквадратической ошибки (MSE) между измеренным положением y и положением  , оцененным текущим фильтром, а затем для сравнения этой текущей ошибки с соответствующей эталонной ошибкой MSE0, полученной во время калибровки на земле эталонного фильтра.
, оцененным текущим фильтром, а затем для сравнения этой текущей ошибки с соответствующей эталонной ошибкой MSE0, полученной во время калибровки на земле эталонного фильтра.
Более подробно, эталонная среднеквадратическая ошибка (MSE0) рассчитывается сначала между выходной переменной, представляющей реальное положение исполнительных механизмов 29, которое измерено в течение стадий стендовых испытаний, и соответствующей выходной переменной, представляющей положение исполнительных механизмов 29, которое оценено эталонным рациональным фильтром  .
.
После этого текущая среднеквадратическая ошибка (MSE) рассчитывается между текущей выходной переменной, представляющей реальное положение исполнительных механизмов 29, которое измерено во время измерений в реальном времени, и соответствующей выходной переменной, представляющей положение исполнительных механизмов 29, которое оценено текущим рациональным фильтром  .
.
Таким образом, можно рассчитывать разность между двумя фильтрами посредством отношения e 0 между текущей среднеквадратической ошибкой (MSE) и эталонной среднеквадратической ошибкой (MSE0):

Это отношение служит для проверки точности текущего фильтра относительно эталонного фильтра. Значение отношения e 0, возможно, может быть меньшим, чем 1, если текущий фильтр локально лучше настроен, чем был опорный фильтр во время стендовых испытаний. В противоположность, когда значение отношения e 0 является большим, чем предопределенное значение (например, в результате статистического исследования отношения на нормальных начальных данных), тогда указывается аномалия поведения.
Еще одна технология для сравнения текущей модели и эталонной модели состоит в средстве 5 процессора, рассчитывающем индикаторы, которые отслеживают вариацию остаточной энергии.
Таким образом, для такой входной переменной xj(t) (из числа k входных сигналов), спектральная плотность  энергетического спектра рассчитывается посредством преобразования Фурье автокорреляционной функции Rjj(τ) входной переменной или сигнала xj(t):
энергетического спектра рассчитывается посредством преобразования Фурье автокорреляционной функции Rjj(τ) входной переменной или сигнала xj(t):

После этого последовательность  локальных индикаторов e
j рассчитывается интегрированием, которое взвешивается посредством текущего и эталонного рациональных фильтров
локальных индикаторов e
j рассчитывается интегрированием, которое взвешивается посредством текущего и эталонного рациональных фильтров  и
и  на полосе пропускания частот каждой входной переменной xj(t):
на полосе пропускания частот каждой входной переменной xj(t):

Член  соответствует спектральному распределению плотности энергии входной переменной xj(t).
соответствует спектральному распределению плотности энергии входной переменной xj(t).
Должно быть отмечено, что, для того чтобы сделать расчет более быстрым, могут приниматься во внимание только частотные характеристики для каждого энергетического спектра  без расчета интеграла.
без расчета интеграла.
После этого последовательность  локальных количественных показателей
локальных количественных показателей  рассчитывается с использованием технологии корреляции между локальными индикаторами e
j, где
рассчитывается с использованием технологии корреляции между локальными индикаторами e
j, где  - регрессионная оценка между локальным индикатором e
j и другими локальными индикаторами:
- регрессионная оценка между локальным индикатором e
j и другими локальными индикаторами:

причем c j,i являются коэффициентами регрессии.
Более того, можно рассчитывать глобальную количественную оценку Z2 в качестве расстояния Махаланобиса, измеряющего несходство между последовательностью  остатков
остатков  и средним значением
и средним значением  у z, рассчитанного в течение стадий стендовых испытаний с ковариационной матрицей Σ.
у z, рассчитанного в течение стадий стендовых испытаний с ковариационной матрицей Σ.
Глобальный количественный показатель Z2, в таком случае, задается следующей формулой:

Для того чтобы минимизировать риски ошибки, когда режим полета слабо идентифицируется, можно определять финальный количественный показатель  умножением глобального количественного показателя Z2 на показатель качества классификации режима полета.
умножением глобального количественного показателя Z2 на показатель качества классификации режима полета.
предупредительный сигнал аномалии поведения указывается, когда значение финального количественного показателя  превышает предопределенное значение. В качестве примера это значение может определяться посредством принятия во внимание распределения Z2 (здесь Z2 придерживается известного закона распределения, а именно распределения хи-квадрат
превышает предопределенное значение. В качестве примера это значение может определяться посредством принятия во внимание распределения Z2 (здесь Z2 придерживается известного закона распределения, а именно распределения хи-квадрат  , для которого известны квантили).
, для которого известны квантили).
Когда обнаружена аномалия, тогда можно анализировать индикаторы более подробно, для того чтобы находить неисправный элемент схемы 21a регулятора двигателя 1.
Можно отслеживать каждый нормированный локальный индикатор
где σj - j-й диагональный элемент ковариационной матрицы Σ.
В предпочтительной реализации различные этапы способа по изобретению выполняются посредством команд управляющей программы.
Следовательно, изобретение также предоставляет компьютерный программный продукт, программа является пригодной для реализации в средстве процессора или компьютерной системе, программа включает в себя команды управляющей программы, приспособленные для реализации способа по изобретению, как описано выше.
Программа может пользовать любой язык программирования и может быть в форме исходного кода, объектного кода или кода, промежуточного между исходным кодом и объектным кодом, такой как в частично оттранслированной форме или в любой другой требуемой форме.
Изобретение также предусматривает носитель данных, который является читаемым компьютером и включающим в себя команды компьютерной программы, как упомянуто выше.
Носитель данных может быть любой сущностью или устройством, способными к хранению программы. Например, носитель может содержать средство хранения, такое как постоянное запоминающее устройство (ПЗУ, ROM), например, ПЗУ на компакт диске (CD) или ПЗУ на микроэлектронных схемах, либо некоторое другое средство хранения.
Более того, носитель данных может быть транспортируемым носителем, таким как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель, по радио или другим средством.
В качестве альтернативы, носитель данных может быть интегральной схемой, в которой заключена программа, схема является приспособленной для выполнения, или для использования при выполнении, данного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИДЕНТИФИКАЦИЯ ОТКАЗОВ В АВИАЦИОННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2522037C2 |
| НОРМАЛИЗАЦИЯ ДАННЫХ, ИСПОЛЬЗУЕМЫХ ДЛЯ КОНТРОЛЯ АВИАЦИОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2522308C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ОПАСНОГО ВОЖДЕНИЯ И КОМПЬЮТЕР ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2679299C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИК И ВОЗМУЩЕНИЙ ДИНАМИЧЕСКИХ ОБЪЕКТОВ В СТОХАСТИЧЕСКИХ СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2015 |
|
RU2623464C2 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| СИСТЕМА СВЯЗИ ДЛЯ ДЕТЕКТОРА ПОЛОЖЕНИЯ | 2008 |
|
RU2422871C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ СТИЛЯ ВОЖДЕНИЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2549598C2 |
| СПОСОБ И СИСТЕМА ДЛЯ СТАДИИ ОБУЧЕНИЯ АКУСТИЧЕСКОГО ИЛИ ВИБРАЦИОННОГО АНАЛИЗА МАШИНЫ | 2016 |
|
RU2704073C2 |
| СПОСОБ И СЕРВЕР ГЕНЕРИРОВАНИЯ МЕТА-ПРИЗНАКА ДЛЯ РАНЖИРОВАНИЯ ДОКУМЕНТОВ | 2018 |
|
RU2721159C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ПЕРЕДАЧИ С ЭМУЛЯЦИЕЙ РАСПРОСТРАНЕНИЯ ОПОРНОГО СИГНАЛА, ИСПОЛЬЗУЮЩЕГОСЯ ДЛЯ ОЦЕНКИ ПОТЕРЬ, ПО КАНАЛУ С ПРЕДВАРИТЕЛЬНЫМ КОДИРОВАНИЕМ, РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО И ИХ ВАРИАНТЫ | 2023 |
|
RU2811939C1 |
Изобретение относится к обнаружению аномалий работы схемы для регулирования статорных клапанов в компрессорах турбореактивного двигателя Технический результат - оптимизация времени расчета для обнаружения аномалии поведения двигателя. Изобретение предусматривает способ и систему для обнаружения аномалий в авиационном двигателе (1), содержащие: средство (5) для определения модели поведения средства (21) управления упомянутого авиационного двигателя (1) с использованием временной регрессии, моделирующей поведение упомянутого средства (21) управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и команд упомянутого средства (21) управления; средство (5) для непрерывного перерасчета упомянутой модели поведения для каждого нового набора данных; и средство (5) для контроля статистической вариации упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства управления, представляющую аномалию работы упомянутого двигателя (1). 3 н. и 12 з.п. ф-лы, 7 ил.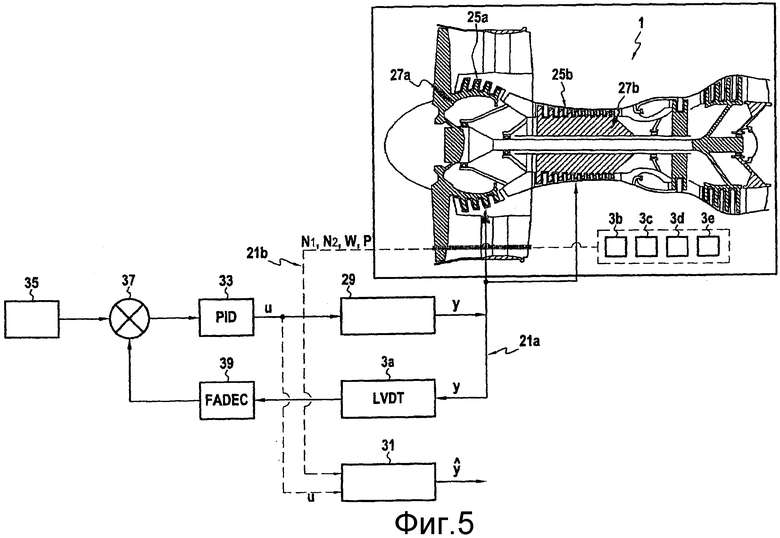
1. Способ обнаружения аномалий в авиационном двигателе (1), способ, отличающийся тем, что он содержит следующие этапы, на которых:
определяют модель поведения для средства (21) управления упомянутого авиационного двигателя (1) посредством использования временной регрессии, которая моделирует поведение упомянутого средства (21) управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и управления упомянутого средства (21) управления;
непрерывно перерассчитывают упомянутую модель поведения для каждого нового набора данных; и
контролируют статистическую вариацию упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства (21) управления, представляющую аномалию работы упомянутого двигателя (1).
2. Способ по п.1, содержащий следующие этапы, на которых:
собирают начальный набор данных, относящийся к упомянутому средству (21) управления;
разбивают упомянутый начальный набор данных на множество одинаковых интервалов, представляющих разные режимы (R1-R6) полета, идентифицированные индикаторами режима, определенными с использованием критериев, установленных экспертами; и
определяют эталонную модель поведения для каждого режима полета.
3. Система для обнаружения аномалий в авиационном двигателе (1), система, отличающаяся тем, что она содержит:
средство (5) для определения модели поведения средства (21) управления упомянутого авиационного двигателя (1) посредством использования временной регрессии, которая моделирует поведение упомянутого средства (21) управления в зависимости от набора данных, относящегося к упомянутому средству управления и включающего в себя измерения прошлых поведений, а также измерения состояний и команд упомянутого средства (21) управления;
средство (5) для непрерывного перерасчета упомянутой модели поведения для каждого нового набора данных; и
средство (5) для контроля статистической вариации упомянутой модели поведения, для того чтобы обнаруживать аномалию поведения упомянутого средства управления, представляющую аномалию работы упомянутого двигателя (1).
4. Система по п.3, содержащая:
средство (5) для сбора начального набора данных, относящегося к упомянутому средству (21) управления;
средство (5) для разбиения упомянутого начального набора данных на множество одинаковых интервалов, представляющих разные режимы (R1-R6) полета, идентифицированные индикаторами режима, определенными с использованием критериев, установленных экспертами; и
средство (5) для определения эталонной модели поведения для каждого режима полета.
5. Система по п.4, содержащая:
средство (5) для действия со временем для сбора текущего набора данных, относящегося к упомянутому средству (21) управления;
средство (5) для сохранения содержимого упомянутого текущего набора данных за предопределенный период времени в буфере (23) памяти;
средство (5) для использования упомянутого текущего набора данных для расчета оценки индикаторов режима, чтобы идентифицировать текущий режим полета, специфичный упомянутому предопределенному периоду времени;
средство (5) для расчета текущей модели поведения, соответствующей упомянутому текущему набору данных и упомянутому текущему режиму полета;
средство (5) для оценивания несходства поведения между упомянутой текущей моделью поведения и упомянутой эталонной моделью поведения, соответствующей упомянутому текущему режиму полета; и
средство (5) для обнаружения аномалии поведения упомянутого средства (21) управления, когда упомянутое несходство поведения является большим, чем предопределенное пороговое значение нормальности.
6. Система по п.5, отличающаяся тем, что упомянутая модель поведения является рациональным фильтром, система содержит:
средство (5) для нормализации упомянутого начального набора данных вычитанием фильтра нижних частот и нормирования относительно локального разброса, оцененного для каждого режима полета;
средство (5) для определения множества математических формул, каждая формула выражает выходной вектор в настоящий момент y(t), представляющий текущее поведение упомянутого средства (21) управления в зависимости от выходных векторов в предыдущие моменты y(t-i), представляющих более ранние измерения поведения, и в зависимости от входных векторов, содержащих входной вектор в настоящий момент x(t) и входные векторы в предыдущие моменты x(t-i), каждый входной вектор x строится конкатенацией упомянутых измерений команд и состояния упомянутого средства управления;
средство (5) для использования упомянутого множества математических формул для определения эталонного рационального фильтра для каждого режима полета; и
средство (5) для использования упомянутого множества математических формул для расчета текущего рационального фильтра, относящегося к упомянутому текущему набору данных и к упомянутому текущему режиму полета.
7. Система по п.6, отличающаяся тем, что каждая математическая формула из упомянутого множества математических формул соответствует линейному уравнению между упомянутыми выходными векторами y и входными векторами x, описанными аналитически во временной области посредством:
A(q)y = B(q)x, причем A(q) является вещественным полиномом, имеющим форму:
A(q) = 1 + a1q -1 + a2q -2 + … + araq-ra
а B(q) является вещественным полиномом, в котором каждый коэффициент является линейным вектором, имеющим такой же размер, как входной вектор x, и имеющим форму:
B(q) = b0 + b1q -1 + b2q -2 + … + brbq-rb , причем q-1(x(t)) = x(t-1)
8. Система по п.7, отличающаяся тем, что она содержит:
средство (5) для извлечения текущих нулей и полюсов из полиномов, связанных с упомянутым текущим рациональным фильтром, соответствующим упомянутому текущему режиму полета;
средство (5) для использования экспертных критериев для расчета индикаторов нормальности для упомянутого текущего режима полета из упомянутых текущих нулей и полюсов, а также из другой информации, представляющей контекст сбора данных, относящийся к упомянутому средству (21) управления; и
средство (5) для обнаружения аномалии поведения упомянутого средства (21) управления, когда несходство между упомянутыми индикаторами нормальности и соответствующим пороговым значением нормальности является большим, чем предопределенное значение.
9. Система по п.7, отличающаяся тем, что она содержит:
средство (5) для определения несходства посредством функции, приспособленной к динамическому диапазону упомянутого средства (21) управления; и
средство (5) для обнаружения аномалии поведения упомянутого средства (21) управления, когда упомянутое несходство между эталонным рациональным фильтром и текущим рациональным фильтром является большим, чем предопределенное значение.
10. Система по п.3, отличающаяся тем, что упомянутое средство (21) управления соответствует схеме (21a) регулятора, которая приводит в действие исполнительные механизмы (29), управляющие статорными клапанами (25a, 25b) в компрессоре (27a) низкого давления и компрессоре (27b) высокого давления турбореактивного двигателя (1), и служащие для изменения геометрий упомянутых компрессоров (27a, 27b) в зависимости от режима полета, и тем, что упомянутый набор данных, относящийся к упомянутой схеме (21a) регулятора, включает в себя данные о положениях исполнительных механизмов (29) и внешние данные, включающие в себя первую частоту N1 вращения вала упомянутого компрессора (27a) низкого давления, вторую частоту N2 вращения вала упомянутого компрессора (27b) высокого давления, давление P ниже по потоку от компрессоров, расход W топлива и команду u для исполнительных механизмов (29).
11. Система по п.10, отличающаяся тем, что она содержит:
средство (5) для определения дискретного авторегрессионного фильтра стационарного режима для моделирования поведения выходной переменной в настоящий момент y(t), соответствующей текущим положениям исполнительных механизмов (29), в зависимости от выходных переменных в предыдущие моменты y(s; s < t), соответствующие более ранним положениям исполнительных механизмов (29), и в зависимости от входных переменных
x(s) = (xj(s); s≤t)j=1…k,
соответствующих упомянутым внешним данным в прошлые и настоящий моменты, упомянутый авторегрессионный фильтр выражается в частотном спектре w рациональным фильтром (Fj(w))j=1…k (31) полиномиальных дробей, имеющих вид:
Fj(w) =
где Bj(w) = bj,0 + bj,1w + … + bj,rj wrj
и

средство (5) для сбора начальных цифровых данных, представляющих начальную входную и выходную переменные (x0(s), y0(s)), измеренные и сохраненные в течение стадий стендовых испытаний;
средство (5) для идентификации режимов полета по упомянутым начальным цифровым данным;
средство (5) для расчета, для каждого режима полета, оптимального набора рангов rj и r0 упомянутых полиномиальных дробей упомянутого рационального фильтра (Fj(w))j=1…k; и
средство (5) для расчета, для каждого режима полета, эталонного рационального фильтра (Fj 0(w))j=1…k.
12. Система по п.11, отличающаяся тем, что она содержит:
средство (5) для сохранения со временем цифровых измерений, представляющих входные и выходные переменные (x(s), y(s)), в буфере (23) памяти для формирования выборки N измерений:
It = {(x(s), y(s)); s
средство (5) для испытания стабильности упомянутой выборки N измерений;
средство (5) для идентификации текущего режима полета и для оценивания качества его классификации QFR
средство (5) для оценивания текущего рационального фильтра (Fj(w))j=1…k для оптимального набора рангов, связанных с упомянутым текущим режимом полета;
средство (5) для сравнения упомянутого текущего рационального фильтра (Fj(w))j=1…k с эталонным рациональным фильтром (Fj 0(w))j=1…k, соответствующим одному и тому же режиму полета; и
средство (5) для указания аномалии поведения упомянутой схемы (21a) регулятора, когда разница между упомянутым текущим рациональным фильтром (Fj(w))j=1…k и упомянутым эталонным рациональным фильтром (Fj 0(w))j=1…k является большей, чем предопределенное значение.
13. Система по п.12, отличающаяся тем, что она содержит:
средство (5) для расчета эталонной среднеквадратической ошибки MSE0 между выходной переменной, представляющей реальное положение исполнительных механизмов (29), которое измерено в течение стадий стендовых испытаний, и соответствующей выходной переменной, представляющей положение исполнительных механизмов (29), которое оценено упомянутым текущим эталонным рациональным фильтром (Fj 0(w))j=1…k;
средство (5) для расчета текущей среднеквадратической ошибки MSE между текущей выходной переменной, представляющей реальное положение исполнительных механизмов (29), измеренное в течение измерений в реальном времени, и соответствующей выходной переменной, представляющей положение исполнительных механизмов (29), оцененное упомянутым текущим рациональным фильтром (Fj(w))j=1…k;
средство (5) для расчета разности, определенной отношением e0 упомянутой текущей среднеквадратической ошибки MSE и упомянутой эталонной среднеквадратической ошибки MSE0:
e0 = 
средство (5) для указания аномалии, когда упомянутое отношение e0 является большим, чем предопределенное значение.
14. Система по п.12, отличающаяся тем, что она содержит:
средство (5) для расчета последовательности e = (ej)j=1…0 локальных индикаторов ej взвешенным интегрированием посредством упомянутых текущего и эталонного рациональных фильтров (Fj(w))j=1…k и (Fj 0(w))j=1…k на полосе пропускания частот каждой входной переменной xj(t):

причем

и

средство (5) для расчета последовательности 



причем cj,i являются коэффициентами регрессии;
средство (5) для расчета глобального количественного показателя Z2 с использованием расстояния Махаланобиса:

где 
средство (5) для расчета финального количественного показателя 

средство (5) для указания предупредительного сигнала аномалии поведения, когда значение финального количественного показателя 
15. Машиночитаемый носитель, содержащий компьютерную программу, выполнение команд которой побуждает процессор выполнять этапы способа по п.1.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP 19260021 A2, 28.05.2008 | |||
| Отстойник | 1989 |
|
SU1677172A1 |
| СПОСОБ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ ДИЗЕЛЕЙ | 1992 |
|
RU2034260C1 |

