Область техники
Изобретение относится к области измерительной техники и может быть использовано для улучшения динамической характеристики измерительных преобразователей температуры (ИПТ) без изменения их конструкции путем дополнительной обработки результатов динамических измерений.
Уровень техники
Специфика динамического измерения температуры заключается в том, что оно характеризуется двумя составляющими погрешности, обусловленными существенной инерционностью характерной для ИПТ и шумами измерения. Вследствие этого, в задаче коррекции динамической погрешности наибольшее значение имеют две проблемы: восстановление измеряемого сигнала, динамически искаженного ИПТ, и анализ динамической погрешности. Из уровня техники известны следующие решения задачи коррекции динамической погрешности измерения температуры.
Известен цифровой способ измерения температуры и устройство для его реализации (патент RU 2344384 C1, МПК G01K 7/42, опубл. 20.01.2009), в котором уменьшение динамической погрешности измерения температуры достигается путем минимизации температуры самонагрева измерительного первичного преобразователя. Недостатком способа является дополнительное схемотехническое решение, вносимое в конструкцию существующего измерительного преобразователя температуры.
Известен способ коррекции характеристик измерительных преобразователей (патент RU 2503968 C1, МПК G01R 35/00, опубл. 10.01.2014), который позволяет повысить точность измерений за счет устранения дополнительной динамической температурной погрешности путем выделения в преобразователе каналов измерения основной и дополнительной входных величин, градуировки каналов измерительного преобразователя при различных комбинациях значений его входных величин и определения значения основной входной величины по параметрам математической модели измерительного преобразователя и текущим значениям выходных величин. Недостатком данного способа является, то, что он основывается на формировании дополнительного массива данных, содержащего сведения о скорости изменения влияющей величины в чувствительном элементе датчика для характеризации динамики помехи.
Известны способ и система для корректировки сигнала измерения температуры (патент RU 2509991 C2, МПК G01K 7/42, 13/02, опубл. 20.03.2014), который относится к области авиации и может быть использован для корректировки температурных параметров в турбореактивном двигателе летательного аппарата. Способ включает в себя этап цифрового моделирования температуры, измеренной датчиком, с использованием моделированного сигнала; этап оценивания сигнала ошибки запаздывания для датчика на основании моделированного сигнала и сигнала, который получают путем фильтрации моделированного сигнала; этап корректировки сигнала измерения, который выдается датчиком, посредством оцененного сигнала ошибки запаздывания. Недостатком способа является необходимость применения моделированного сигнала для оценивания ошибки запаздывания для датчика температуры. Погрешность моделирования такого сигнала полностью перейдет в оценку ошибки запаздывания.
Наиболее близким техническим решением по совокупности существующих признаков является помехоустойчивый самонастраивающийся измеритель температуры газа газотурбинного двигателя (патент RU 2601712 C2, МПК F02C 9/00, опубл. 10.11.2016; патент RU 2617221 C1, МПК F02C 9/00, опубл. 24.04.2017), в котором осуществляется компенсация динамической погрешности термопары путем введения последовательного компенсатора инерционности термопары. Компенсация реализуется корректированием постоянной времени передаточной функции термопары через самонастройку постоянной времени корректирующего звена. Недостатком данного способа является то, что при построении самонастраивающихся измерителей температуры газа используются дополнительные косвенные измерения различных параметров газотурбинного двигателя.
Техническая задача заявляемого способа заключается в оценке и коррекции динамической погрешности ИПТ на основе обработки измеренного сигнала с помощью адаптивного фильтра. Способ не требует дополнительных косвенных измерений параметров объекта и самонастройка адаптивного фильтра основывается только на знании параметров динамической модели измерительного преобразователя температуры.
Технический результат изобретения заключается в уменьшении динамической погрешности ИПТ. Технический результат в целом достигается тем, что способ основывается на коррекции динамической характеристики ИПТ путем оптимальной (по минимуму среднеквадратической погрешности) обработки измеренного сигнала, содержащего аддитивную шумовую составляющую.
Указанный технический результат достигается за счет того, что в способе оценки и коррекции динамической погрешности измерительного преобразователя температуры, включающем применение корректирующего устройства к выходному сигналу ИПТ, согласно изобретению, обеспечение помехоустойчивости корректирующего устройства по критерию минимума оценки динамической погрешности в качестве опорного сигнала температуры используется сдвинутая во времени копия восстанавливаемого сигнала.
Сущность предлагаемого способа состоит в том, что он направлен на адаптивную обработку сигнала ИПТ непосредственно в процессе динамического измерения. Способ заключается в оценке и коррекции динамической погрешности ИПТ, описываемого линейной передаточной функцией, на основе обратной модели ИПТ и нерекурсивного фильтра с линейной фазовой характеристикой, адаптивного к минимуму оценки погрешности по порядку (длине импульсной характеристики) этого фильтра. Динамическая модель измерительной системы строится на основе композиции (свертки) коэффициентов обратной дискретной модели ИПТ первого порядка и импульсной характеристики адаптивного фильтра. Динамическая модель измерительной системы для ИПТ высших порядков строится на основе композиции обратной модели ИПТ, редуцированной к последовательности динамических звеньев первого порядка, и импульсной характеристики адаптивного фильтра. Редукция осуществляется на основе первичной обработки выходного сигнала корректирующим фильтром специальной формы. Для оценки динамической погрешности восстановления входного сигнала ИПТ задержанная копия сигнала сравнивается с восстанавливаемым сигналом, пропущенным через адаптивный фильтр с линейной фазовой характеристикой. Эта процедура осуществляется адаптивным линейным оценивателем динамической погрешности ИПТ. Оцениватель входит в структуру измерительной системы в виде блока, реализующего адаптивный алгоритм настройки оптимального порядка фильтра.
Сущность изобретения поясняется следующими графическими материалами:
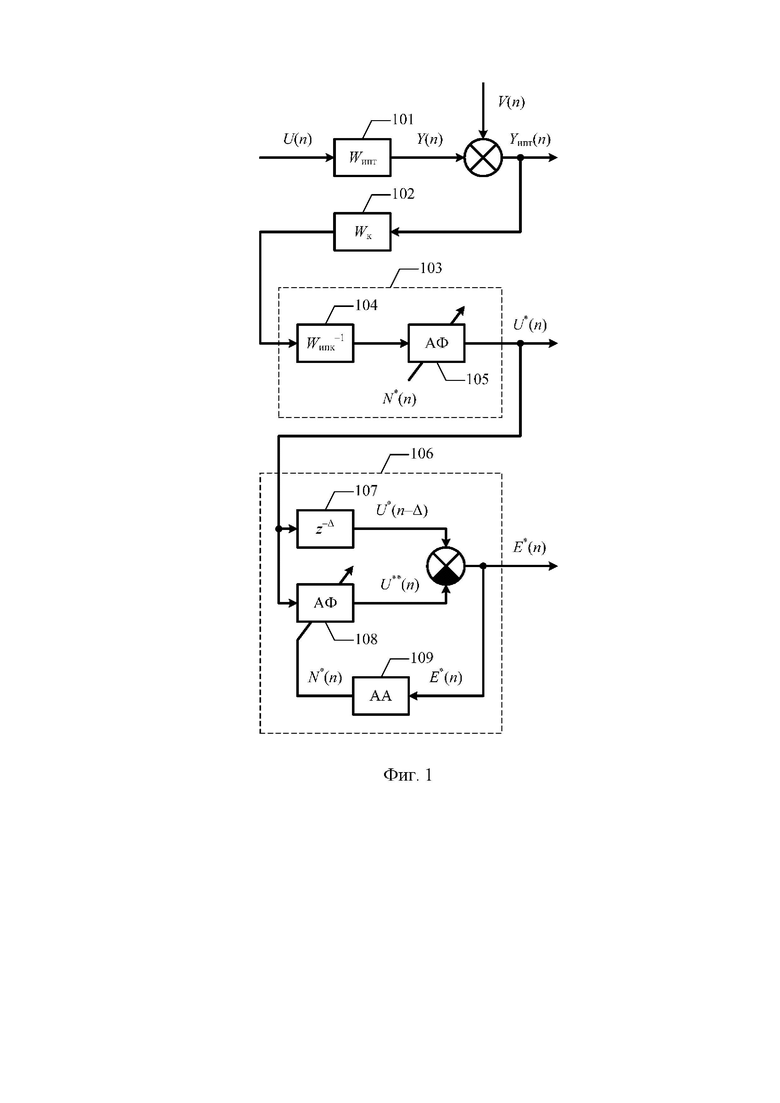
Фиг. 1 - Схема измерительной системы с адаптивным линейным оценивателем динамической погрешности
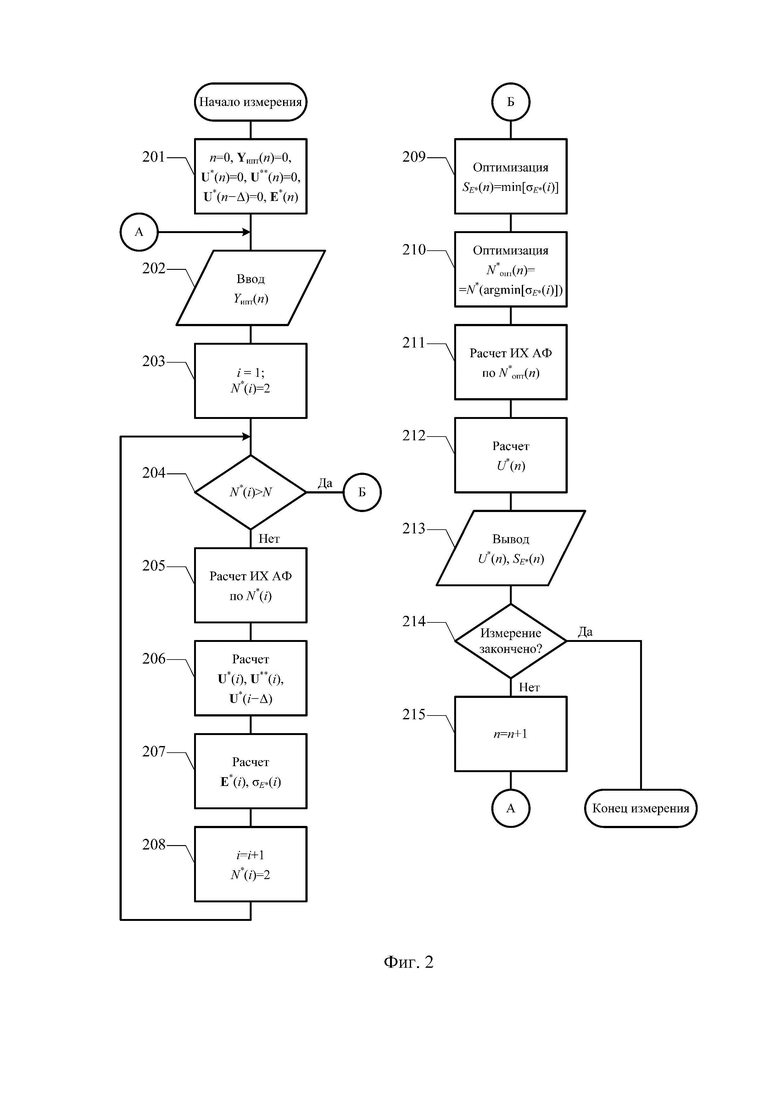
Фиг. 2 - Блок-схема адаптивного алгоритма оценивания и корректирования динамической погрешности
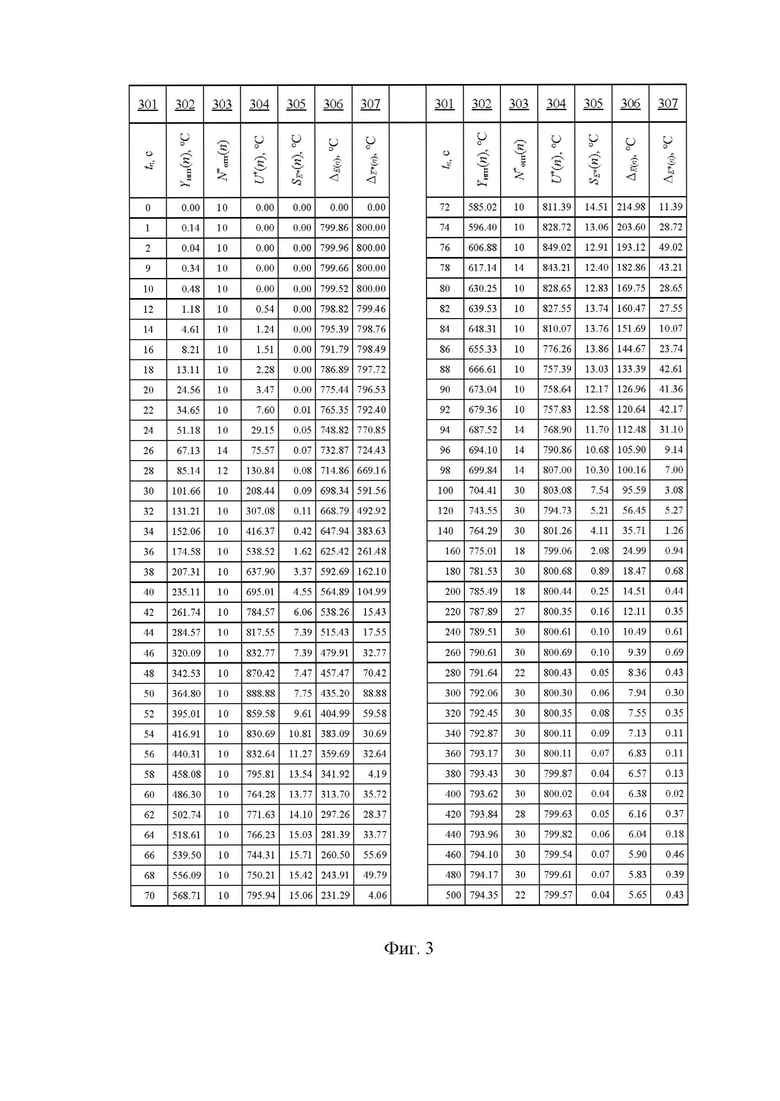
Фиг. 3 - Результаты лабораторных испытаний ИПТ (Таблица 1).
Способ осуществляется следующим образом. Способ осуществляется с помощью измерительной системы, блок-схема которой приведена на фиг. 1.
Динамическая модель ИПТ как линейная стационарная система описывается передаточной функцией Wипт(p) (101, фиг. 1) в виде:

где U(p), Y(p) - изображения по Лапласу входного и выходного сигналов ИПТ; p - комплексная переменная (частота); bi и aj - постоянные коэффициенты; 

Числовые значения m, n, bi и aj определяются конкретным типом и конструкцией ИПТ (наличием защитной арматуры, толщиной воздушного зазора между чувствительным элементом и арматурой ИПТ и т.д.).
Измеренный сигнал Yипт(p) содержит выходной сигнал Y(p) и аддитивный шум V(p). Сигнал погрешности динамического измерения ИПТ запишется в виде:

где

Погрешность (2) определяется двумя составляющими: первая в соответствии с (3) обусловлена динамической характеристикой (инерционностью) ИПТ, вторая - аддитивным шумом на его выходе. Тогда уменьшение погрешности E(p) заключается в одновременном корректировании этих двух составляющих.
Предлагается способ оценивания динамической погрешности ИПТ, описываемого передаточной функцией (1), в условиях аддитивного шума на его выходе на основе модели измерительной системы, приведенной на фиг. 1. Модель измерительной системы содержит блок адаптивного линейного оценивателя (106, фиг. 1) динамической погрешности с адаптивным алгоритмом (109, фиг. 1), схема которого представлена на фиг. 2. В блоке адаптивного линейного оценивателя корректируется динамическая погрешность ИПТ, описываемого передаточной функцией (1). Поскольку опорный сигнал в измерительной задаче недоступен прямому измерению, то в его качестве использована сдвинутая элементом задержки копия входного восстанавливаемого сигнала ИПТ, а в качестве адаптивного фильтра (105 и 108, фиг. 1) - линейный фильтр с конечной импульсной характеристикой. Настраиваемым параметром является порядок фильтра (длина импульсной характеристики). Порядок регулируется в пределах оконной весовой функции фильтра по критерию минимума оценки среднеквадратичной погрешности.
Предварительное корректирование динамической характеристики ИПТ осуществляется блоком с передаточной функции Wк(p) (102, фиг. 1) следующего вида:

где
Преобразование выходного измеренного сигнала ИПТ в блоке предварительной коррекции эквивалентно преобразованию измеряемого сигнала U(p) ИПТ, описываемого передаточной функцией вида  (104, фиг. 1)
(104, фиг. 1)
Динамическая модель (1) ИПТ представляется в дискретной форме для некоторого периода T квантования сигналов. Дискретный аналог передаточной функции (5) 1-го порядка на основе z-преобразования записывается в виде:
где 
Представим вектор значений импульсной характеристики восстанавливающего фильтра (103, фиг. 1) в виде линейной дискретной свертки вектора, состоящего из коэффициентов  передаточной функции (6), с вектором значений импульсной характеристики нерекурсивного фильтра:
передаточной функции (6), с вектором значений импульсной характеристики нерекурсивного фильтра:

где  - вектор значений импульсной переходной функции нерекурсивного фильтра; N - порядок фильтра; * - оператор линейной дискретной свертки.
- вектор значений импульсной переходной функции нерекурсивного фильтра; N - порядок фильтра; * - оператор линейной дискретной свертки.
Свертка (7) вектора  с импульсной характеристикой нерекурсивного фильтра обеспечивает принципиальную устойчивость корректирующего устройства измерительной системы из-за отсутствия в таком фильтре обратных связей.
с импульсной характеристикой нерекурсивного фильтра обеспечивает принципиальную устойчивость корректирующего устройства измерительной системы из-за отсутствия в таком фильтре обратных связей.
Для обеспечения линейности фазовой характеристики нерекурсивного фильтра зададим условие симметричности его импульсной характеристики

В результате свертки (7) определены коэффициенты передаточной функции восстанавливающего фильтра. Этот фильтр одновременно корректирует первую составляющую (3) погрешности динамического измерения путем восстановления измеряемого сигнала и вторую составляющую - фильтрацией аддитивного шума на выходе ИПТ.
Адаптивный режим функционирования измерительной системы, которая оценивает и корректирует динамическую погрешность в процессе измерения (фиг. 1) характеризуется тем, что динамическая погрешность оценивается для текущего наблюдения измеренного сигнала ИПТ в момент дискретного времени tn=nT на основе этого текущего и нескольких предыдущих наблюдений в моменты времени:  где
где  N - количество наблюдений (отсчетов) сигнала (для текущего отсчета l=0); n - отсчеты дискретного времени tn.
N - количество наблюдений (отсчетов) сигнала (для текущего отсчета l=0); n - отсчеты дискретного времени tn.
Сигнал оценки динамической погрешности запишем в виде

где  - опорный сигнал, являющийся копией восстанавливаемого входного сигнала ИПТ U*(n), сдвинутой элементом задержки z-Δ (107, фиг. 1); U**(n), - выходной сигнал адаптивного фильтра в блоке адаптивного линейного оценивателя динамической погрешности.
- опорный сигнал, являющийся копией восстанавливаемого входного сигнала ИПТ U*(n), сдвинутой элементом задержки z-Δ (107, фиг. 1); U**(n), - выходной сигнал адаптивного фильтра в блоке адаптивного линейного оценивателя динамической погрешности.
Среднее квадратическое отклонение (СКО) оценки динамической погрешности (9) для рассматриваемого режима определяется как
где среднее значение наблюдений сигнала оценки ИПТ имеет вид
Параметр N задает порядок линейного нерекурсивного фильтра, на основе которого оценивается и корректируется динамическая погрешность в структуре восстанавливающего фильтра для текущего наблюдения измеряемого сигнала. Условие симметричности импульсной характеристики (8) обеспечивает постоянство групповой задержки фильтра: TΔ=TN/2.
Адаптивный режим функционирования измерительной системы заключается в поиске оптимального значения порядка N*опт адаптивного фильтра в процессе динамического измерения, определяемого в пределах

Неравенство (11) устанавливает предельное значение ширины импульсной характеристики адаптивного нерекурсивного фильтра, изменяющейся при минимизации оценки динамической погрешности (10) для текущего наблюдения измеряемого сигнала.
Таким образом, оценка динамической погрешности для текущего n-го наблюдения является функцией настраиваемого параметра  :
:

Минимальное значение оценки динамической погрешности (12) соответствует оптимальному значению N*опт порядка адаптивного нерекурсивного фильтра:

Оценка (13) является функцией дискретного времени так же, как и настраиваемый параметр измерительной системы - порядок N*(n) адаптивного нерекурсивного фильтра. Оптимизация параметра N*(n) достигается при минимуме оценки динамической погрешности (10), что и является критерием адаптации измерительной системы. Таким образом, при каждом новом наблюдении измеряемого сигнала динамическая погрешность оценивается и корректируется на основе знаний о предыдущих состояниях измерительной системы.
Адаптивный алгоритм АА, представленный в виде блока в схеме измерительной системы (фиг. 1), предназначен для минимизации оценки динамической погрешности (13) в каждой точке дискретного времени на основе нескольких предыдущих наблюдений измеряемого сигнала.
Адаптивный алгоритм (фиг. 2) функционирует следующим образом. На этапе инициализации 201 формируются векторы длиной N+1, в которые последовательно записываются дискретные отсчеты сигналов измерительной системы. После поступления очередного отсчета выходного сигнала ИПТ 202 запускается цикл 203-208 перебора порядков 203-204 нерекурсивного адаптивного фильтра (105 и 108, фиг. 1). Для каждого значения порядка рассчитываются: 205 - импульсная характеристика (ИХ) восстанавливающего фильтра согласно выражению (7); 206 - текущие значения векторов сигналов измерительной системы по полученной ИХ фильтра; 207 - вектор оценки абсолютной (9) и значение СКО (10) динамической погрешности. После завершения цикла перебора порядков фильтра сформирован вектор значений СКО динамической погрешности, по которому осуществляется оптимизация 209 и 210 текущего значения настраиваемого параметра адаптивного фильтра N*(n). Для оптимального значения  рассчитываются 211 - ИХ восстанавливающего фильтра и 212 - текущий отсчет восстановленного входного сигнала ИПТ. Алгоритм повторяется 214 для следующего отсчета 215 выходного измеренного сигнала ИПТ.
рассчитываются 211 - ИХ восстанавливающего фильтра и 212 - текущий отсчет восстановленного входного сигнала ИПТ. Алгоритм повторяется 214 для следующего отсчета 215 выходного измеренного сигнала ИПТ.
В таблице (фиг. 3) приведены данные лабораторных измерений температуры и результаты их обработки для ИПТ, описываемого передаточной функции следующего вида:

где 

При проведении эксперимента ИПТ подвергался скачкообразному нагреву от 0°C до 800°C путем переноса ИПТ из нулевого термостата в предварительно разогретую трубчатую печь. Таким образом имитировался динамический режим измерения. Данные наблюдений выходного сигнала ИПТ снимались с периодом дискретизации T=1c. Редуцированная модель ИПТ в соответствии с (5) и (6) имеет вид:
где α1=213; α0=-212.
В таблице (фиг. 3) приведены следующие данные:
в графе 301 содержатся отсчеты дискретного времени tn;
в графе 302 - значения выходного измеренного сигнала ИПТ Yипт(n) в моменты дискретного времени tn;
в графе 303 - оптимальные значения порядка  адаптивного фильтра, соответствующие минимальным значениям среднеквадратической оценке динамической погрешности
адаптивного фильтра, соответствующие минимальным значениям среднеквадратической оценке динамической погрешности  приведенным в графе 305;
приведенным в графе 305;
в графе 304 - значения порядка восстановленного входного сигнала ИПТ U*(n);
в графе 306 - значения абсолютной динамической погрешности ИПТ  при входной измеряемой температуре ИПТ
при входной измеряемой температуре ИПТ 
в графе 307 - значения оценки абсолютной динамической погрешности ИПТ 
Как видно из сравнения значений исходной ΔЕ(n) и скорректированной ΔЕ*(n) погрешностей ИПТ, предлагаемый способ, реализованный в описанном адаптивном алгоритме, позволяет уменьшать динамическую погрешность ИПТ без изменения его конструкции путем дополнительной обработки данных динамических измерений. Кроме того, способ позволяет получить оценку динамической погрешности без дополнительных косвенных измерений параметров процессов, возникающих при измерении температуры в динамическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ МУЛЬТИСИНУСОИДАЛЬНЫХ ЦИФРОВЫХ СИГНАЛОВ | 2018 |
|
RU2703933C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| Способ восстановления векторной информации в информационно-измерительных системах | 2020 |
|
RU2757828C1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
| СПОСОБ АДАПТАЦИИ ДИСТАНЦИОННОЙ ЗАЩИТЫ И ОПРЕДЕЛИТЕЛЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ИСПОЛЬЗОВАНИЕМ ЕЕ МОДЕЛИ | 1994 |
|
RU2088012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 1993 |
|
RU2107302C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
Изобретение относится к области измерительной техники и может быть использовано для улучшения динамической характеристики измерительных преобразователей температуры (ИПТ) без изменения их конструкции путем дополнительной обработки результатов динамических измерений. Предложен способ оценки и коррекции динамической погрешности измерительного преобразователя температуры (ИПТ), включающий применение корректирующего устройства к выходному сигналу ИПТ. Причем для обеспечения помехоустойчивости корректирующего устройства по критерию минимума оценки динамической погрешности в качестве опорного сигнала температуры используется сдвинутая во времени копия восстанавливаемого сигнала. Технический результат изобретения заключается в уменьшении динамической погрешности ИПТ. 3 ил.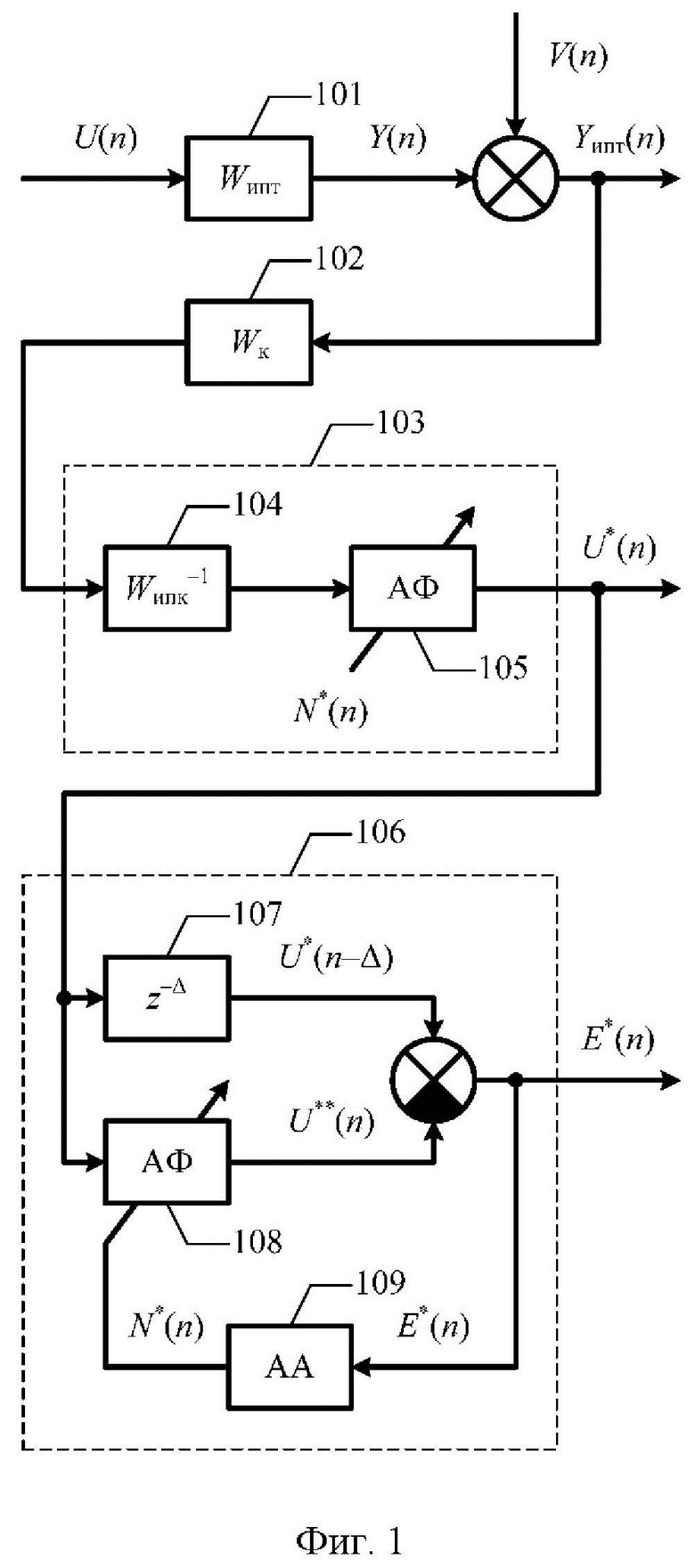
Способ оценки и коррекции динамической погрешности измерительного преобразователя температуры (ИПТ), включающий применение корректирующего устройства к выходному сигналу ИПТ, отличающийся тем, что обеспечение помехоустойчивости корректирующего устройства по критерию минимума оценки динамической погрешности в качестве опорного сигнала температуры используется сдвинутая во времени копия восстанавливаемого сигнала.
| Волосников А.С | |||
| "Измерительная система на основе нерекурсивных фильтров с оптимальной коррекцией погрешности динамического измерения", Измерительная техника, 2022, номер 10, C.19-25 | |||
| Волосников А.С | |||
| "Нейросетевая динамическая модель измерительной системы с фильтрацией восстанавливаемого сигнала", Вестник ЮУрГУ, 2006, номер 14, С | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Шестаков | |||

