ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к способам и устройствам для определения местоположения в системе беспроводной связи. В частности, настоящее изобретение относится к повышению точности определения местоположения за счет обеспечения возможности выравнивания подкадров определения местоположения.
УРОВЕНЬ ТЕХНИКИ
UTRAN (сеть универсального наземного радиодоступа) является термином, который обозначает сеть радиодоступа UMTS (универсальной системы мобильной связи), причем UTRAN состоит из контроллеров радиосети (RNC) и NodeB, т.е. базовых радиостанций. NodeB поддерживают беспроводную связь с мобильным абонентским оборудованием, а RNC управляют NodeB. RNC дополнительно соединены к базовой сетью (CN). Усовершенствованная UTRAN (E-UTRAN) является развитием UTRAN в направлении сети радиодоступа с высокоскоростной передачей данных, малой задержкой и оптимизированной передачей пакетов данных. Дополнительно, E-UTRAN состоит из NodeB, а NodeB взаимосвязаны и дополнительно соединены с усовершенствованной пакетной базовой сетью (EPC). E-UTRAN также называют Долгосрочным развитием (LTE), и она стандартизирована в рамках Проекта партнерства 3-его поколения (3GPP).
Системы сотовой связи третьего поколения, такие как WCDMA (широкополосный множественный доступ с кодовым разделением) могут быть обеспечены несколькими разными способами определения местоположения, тем самым, делая возможными услуги определения местоположения для абонентов сотовой связи. Эти способы в целом применимы также в системах беспроводной связи, использующих иные технологии радиодоступа, такие как LTE. Способы, которые доступны, включают в себя:
- определение местоположения по идентификатору соты (Cell-ID),
- определение местоположения по улучшенному идентификатору соты (Ecell-ID),
- определение местоположения по вспомогательной GPS (A-GPS),
- определение местоположения по различиям во времени прибытия в нисходящей линии связи - с интервалами незанятости в нисходящей линии связи (OTDOA-IPDL),
- определение местоположения по различиям во времени прибытия в восходящей линии связи (UTDOA).
Определение местоположения по Cell-ID определяет соту, с которой соединено абонентское оборудование (UE). Местоположение пользователя, исходя из этого, определяется степенью разбиения на соты. Типично, контроллер радиосети в радиосети (RAN) определяет 3-15-угольный многоугольник, который определяет географическую протяженность соты. Углы этого многоугольника заданы двойными параметрами из широты и долготы в географической системе координат WGS84. Cell-ID способ является основой всех сотовых систем определения местоположения, поскольку он доступен всегда, когда UE имеет возможность соединения с системой.
Определение местоположения по Ecell-ID дополняет определение местоположения по Cell-ID вспомогательной информацией, что сужает область, которая определена многоугольником соты. Применяемым способом в WCDMA является измерение времени прохождения «в оба конца» (RTT). Это измерение определяет время в пути, туда и обратно, от базовой радиостанции (RBS) до UE и обратно. Используя скорость света, может быть рассчитано расстояние от известного местоположения RBS до UE, которое определяет круговую полосу вокруг RBS, где находится UE. Толщина этой полосы определяется погрешностью измерения. Ecell-ID способ получается посредством указания на то, что UE находится как в соте, так и в круговой полосе. Исходя из этого, UE находится в пересечении этих двух географических областей.
Определение местоположения по A-GPS является улучшением военной глобальной системы определения местоположения США (GPS). Опорные GPS-приемники, привязанные, например, к сотовой системе связи, собирают вспомогательные данные, которые при передаче GPS-приемникам в терминалах, соединенных с сотовой системой связи, улучшают функционирование GPS-приемников терминалов. Типично, точность A-GPS может достигать практически 10 метров, к тому же, без операции дифференцирования. Точность становится хуже в густонаселенных районах и в помещении, где чувствительность часто не достаточно высока для детектирования очень слабых сигналов от GPS-спутников. Преимущества A-GPS включают в себя высокую точность, способ легко удовлетворяет требованиям определения местоположения североамериканской службы спасения Е-911: 50 метров для 67% всех определений местоположения, и 150 метров для 95% всех определений местоположения. Недостатком является ограниченное покрытие в помещении, которое является результатом малой интенсивности зондирующих сигналов, которые получаются на уровне земли.
Определение местоположения по OTDOA-IPDL сходно с A-GPS в том, что оно опирается на измерения разницы во времени прибытия. Однако OTDOA-IPDL способ использует измерения UE пилотных радиосигналов (CPICH в WCDMA), переданных из нескольких RBS. Результаты измерений посылают RNC, где для расчета местоположения UE используется метод гиперболической трилатерации. Для того, чтобы улучшить «слышимость» RBS в UE, возможно использовать интервалы незанятости в нисходящей линии связи (IPDL), чтобы ослабить передачи от RBS, с которой соединен UE. Это снижает помехи и, исходя из этого, улучшает слышимость других RBS. Предполагаемое преимущество при OTDOA-IPDL в том, что он теоретически предоставляет лучшее покрытие в помещении, чем дает A-GPS.
Определение местоположения по UTDOA является еще одним способом определения местоположения. Оно сходно с A-GPS в том, что оно опирается на измерения разницы во времени прибытия. Однако UTDOA способ использует измерения RBS (или отдельной единицы измерения местоположения (LMU)) сигналов, переданных из UE, местоположение которого определяется. Переданный сигнал детектируют в нескольких RBS или LMU, после чего измеренные результаты посылают узлу определения местоположения, где методом трилатерации определяют местоположение UE. Для того, чтобы быть в состоянии детектировать время прибытия исходя из измерений, возможных со стороны UE, сначала в главной LMU или главной RBS должен быть создан опорный сигнал. Это выполняется посредством декодирования сигнала, с последующим восстановлением потока кодовых импульсов, которые затем образуют опорный сигнал. Преимущество определения местоположения по UTDOA в том, что оно предоставляет лучшее покрытие в помещении, чем дает A-GPS. Хотя точность вне помещения, как правило, уступает A-GPS.
При рассмотрении определения местоположения, проблемой способов с использованием наземной разницы во времени прибытия, т.е. OTDOA-IPDL и UTDOA, является чувствительность приемника. Теоретически, эти способы могут предоставлять 3-мерное местоположение исходя из измерений 4 времен прибытия (эквивалентно трем (псевдо)измерениям разницы во времени прибытия). Однако здесь условия распространения радиоволн гораздо менее выгодны, чем для A-GPS, поскольку зондирующие сигналы OTDOA-IPDL и UTDOA распространяются вдоль поверхности земли, тогда как сигналы A-GPS распространяются сверху. Поэтому, наземные способы определения местоположения больше страдают от распространения не в прямой видимости (LOS) и многолучевого распространения. Это приводит к резко выделяющимся измерениям, подавление которых требует избыточных детектирований, т.е. детектирований от значительно большего, чем минимальное число RBS. На практике, чтобы добиться пригодной точности определения местоположения, по меньшей мере, 6-8 RBS должны детектироваться в UE, в случае, когда используется определение местоположения по OTDOA-IPDL. Для определения местоположения по UTDOA, по меньшей мере, 6-8 RBS должны детектировать передачи UE для того, чтобы получить пригодные оценки местоположения в практических условиях.
Следствием вышеприведенного является то, что большее число удаленных RBS должно быть продетектировано (OTDOA-IPDL), или должны детектировать (UTDOA). Это означает, что с высокой вероятностью детектированию подлежит менее мощный сигнал. Расчеты типично показывают, что сигналы должны детектироваться до около -40 дБ C/I. Дополнительно, этап предварительного детектирования должен усилить сигнал до около 11-13 дБ C/I, чтобы добиться достаточно низкой вероятности ложных тревог. В сущности, выигрыш от обработки в целях определения местоположения в любой CDMA системе должен составлять 50-55 дБ, чтобы наземное определение местоположения было пригодным. Это значительно больше, чем то, что необходимо для других услуг, что означает, что требования к чувствительности определения местоположения должны быть оценены на стадии определения радио-интерфейса.
Для LTE возможной технологией определения местоположения является OTDOA в нисходящей линии связи, использующая измерения UE по сигналам измерения, например, опорным сигналам и/или сигналам синхронизации, в нескольких сотах в течение назначенных подкадров с низкими помехами, являющимися примером подкадров MBSFN (одночастотной сети многоадресной широковещательной передачи мультимедиа).
Однако основной проблемой способов определения местоположения в системах сотовой связи третьего поколения остается, и может быть резюмировано, следующее:
- определение местоположения по A-GPS является высокоточной технологией с одним основным недостатком - доступность определения местоположения в помещении.
- Определение местоположения по OTDOA-IPDL и UTDOA имеет технический потенциал для обеспечения лучшего покрытия в помещении, чем A-GPS, и предоставления хорошей точности. Однако доступные в настоящее время чувствительности детектирования не достаточны, чтобы обеспечить достаточно хорошую точность. Скорее, здесь можно ожидать вычисления с точностью в пределах между A-GPS и Cell-ID.
Таким образом, проблемой решений определения местоположения для беспроводных систем связи, таких как LTE, является то, что трудно добиться достаточной точности определения местоположения при умеренных чувствительностях детектирования приемника.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Поэтому, задачей настоящего изобретения является предоставление механизма для улучшения точности определения местоположения в системе беспроводной связи.
Настоящее изобретение сфокусировано на технологиях, которые могут смягчить очень жесткие требования к чувствительности детектирования. Задача решается, согласно настоящему изобретению, выбором момента времени, в течение которого должна произойти передача подкадров определения местоположения; и информированием базовых станций, содержащихся в сети беспроводной связи, о первом моменте времени, чтобы позволить выравнивание подкадров определения местоположения. Базовые станции планируют подкадры определения местоположения на основе момента времени, и передают подкадры определения местоположения согласно этому.
В соответствии с первым аспектом настоящего изобретения, предоставлен способ в сетевом узле для планирования подкадров определения местоположения. Сетевой узел содержится в сети беспроводной связи и соединен, по меньшей мере, с первой базовой станцией. Первая базовая станция способна передавать подкадры определения местоположения. Способ содержит этап, на котором выбирают первый момент времени, в течение которого должна произойти передача подкадров определения местоположения. Чтобы позволить выравнивание подкадров определения местоположения, первую базовую станцию информируют о первом моменте времени.
В соответствии со вторым аспектом настоящего изобретения, предоставлен способ в базовой станции для планирования подкадров определения местоположения. Базовая станция содержится в сети беспроводной связи, и соединена, по меньшей мере, с одним сетевым узлом. Способ содержит этап, на котором принимают информацию о первом моменте времени, в течение которого должна произойти передача подкадров определения местоположения, по меньшей мере, от одного сетевого узла. Чтобы позволить выравнивание подкадров определения местоположения, планирование подкадров определения местоположения основывается, по меньшей мере, на этом моменте времени. На дополнительном этапе, способ передает запланированные подкадры определения местоположения.
В соответствии с третьим аспектом настоящего изобретения, предоставлено первое устройство для планирования подкадров определения местоположения. Устройство адаптировано, чтобы содержаться в сетевом узле, который содержится в сети беспроводной связи, и соединен, по меньшей мере, с первой базовой станцией. Первая базовая станция, по меньшей мере, способна передавать подкадры определения местоположения. Кроме того, устройство содержит блок выбора, выполненный с возможностью выбора первого момента времени, в течение которого должна произойти передача подкадров определения местоположения. Дополнительно, устройство содержит блок информирования, выполненный с возможностью информирования, по меньшей мере, первой базовой станции о первом моменте времени для обеспечения возможности выравнивания подкадров определения местоположения.
В соответствии с четвертым аспектом настоящего изобретения, предоставлено второе устройство для планирования подкадров определения местоположения. Устройство адаптировано, чтобы содержаться в базовой станции, которая содержится в сети беспроводной связи и соединена, по меньшей мере, с одним сетевым узлом. Устройство содержит приемный блок, выполненный с возможностью приема информации о первом моменте времени, в течение которого должна произойти передача подкадров определения местоположения, по меньшей мере, от одного сетевого узла. Кроме того, устройство содержит блок планирования, выполненный с возможностью планирования подкадров определения местоположения на основе, по меньшей мере, первого момента времени, чтобы обеспечивать возможность выравнивания подкадров определения местоположения. Дополнительно, устройство содержит передающий блок, выполненный с возможностью передачи запланированных подкадров определения местоположения.
Преимущество настоящего изобретения состоят в том, что когда все из нескольких базовых станций передают свои подкадры определения местоположения примерно в одно и то же время, подкадры определения местоположения будут выравниваться по нескольким сотам. Тем самым, снижаются помехи от символов данных сот в окрестности соты, обслуживающей абонентское оборудование, выполняющее измерения определения местоположения, например, измерение DL OTDOA. Исходя из этого, улучшается слышимость в системе беспроводной связи, что имеет эффект улучшения точности определения местоположения без увеличения чувствительности детектирования в приемнике.
Другие задачи, преимущества и новые признаки станут очевидны из нижеследующего подробного описания изобретения при рассмотрении в сочетании с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания, далее даются ссылки на нижеследующие чертежи и предпочтительные варианты осуществления изобретения.
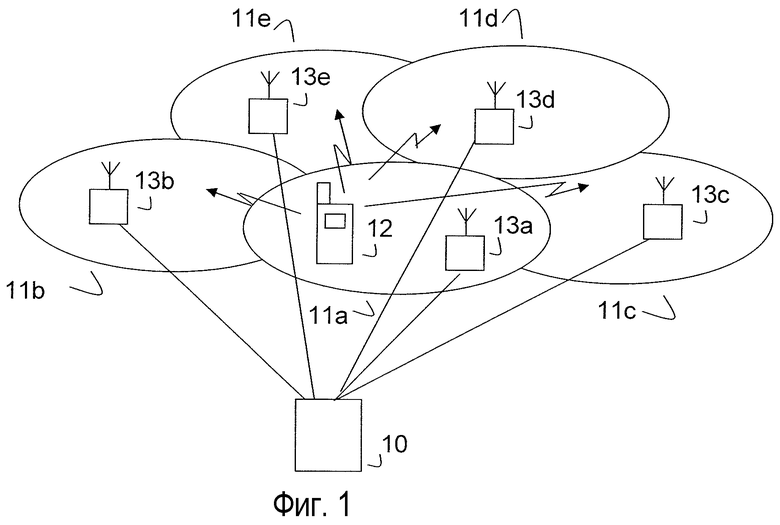
Фиг.1 иллюстрирует часть сотовой системы беспроводной связи, в которой может быть реализовано настоящее изобретение.
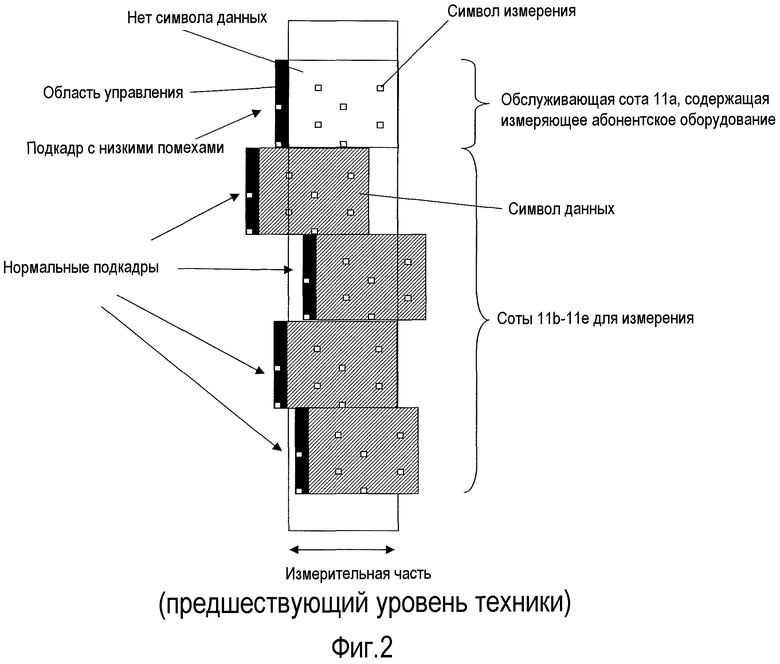
Фиг.2 схематично иллюстрирует размещение подкадров согласно предшествующему уровню техники.
Фиг.3 схематично иллюстрирует размещение подкадров определения местоположения в несинхронизированной сети, дающее грубое выравнивание.
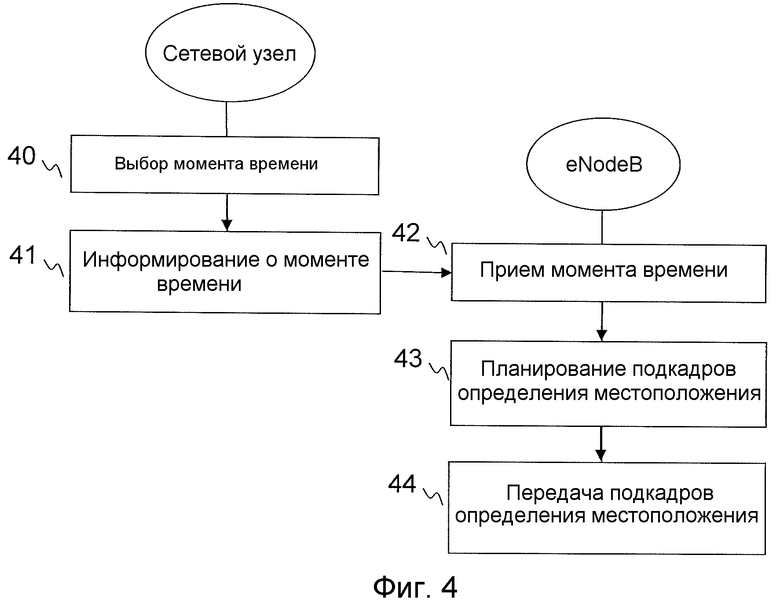
Фиг.4 иллюстрирует блок-схему последовательности операций способа для планирования подкадров определения местоположения, в котором узел определения местоположения выбирает момент времени для планирования подкадров определения местоположения, и информирует соседние eNodeB об этом моменте времени.
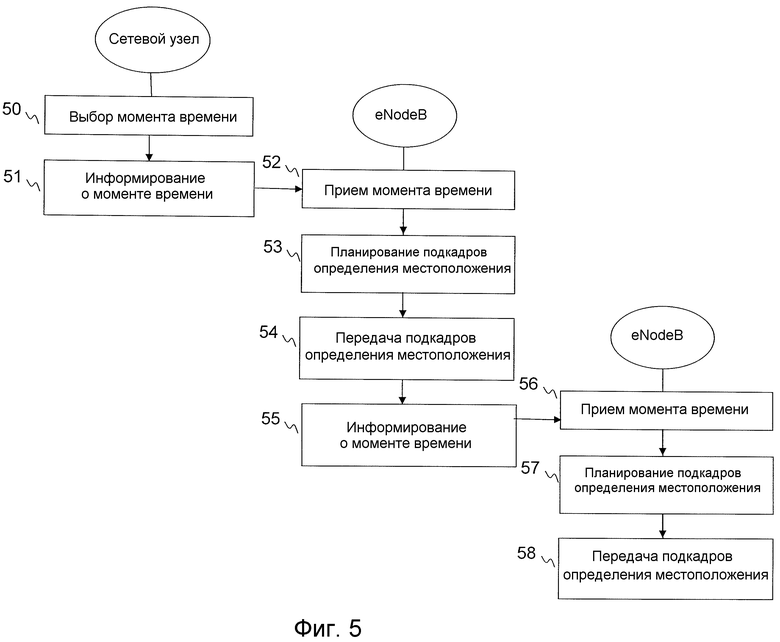
Фиг.5 иллюстрирует блок-схему последовательности операций способа для планирования подкадров определения местоположения, в котором узел определения местоположения выбирает момент времени для планирования подкадров определения местоположения, и информирует один или несколько eNodeB о моменте времени, после чего один или несколько eNodeB информируют соседние eNodeB.
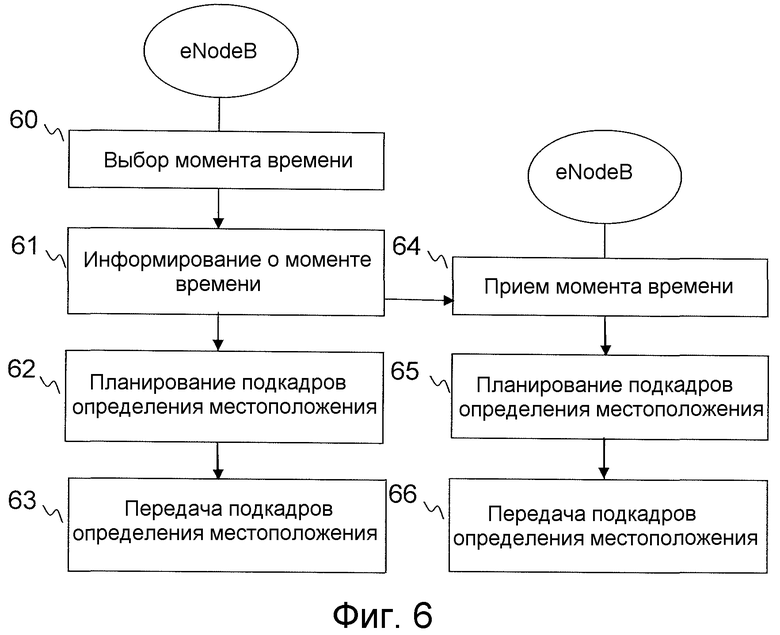
Фиг.6 иллюстрирует блок-схему последовательности операций способа для планирования подкадров определения местоположения, в котором eNodeB выбирает момент времени для планирования подкадров определения местоположения, и информирует соседние eNodeB об этом моменте времени.
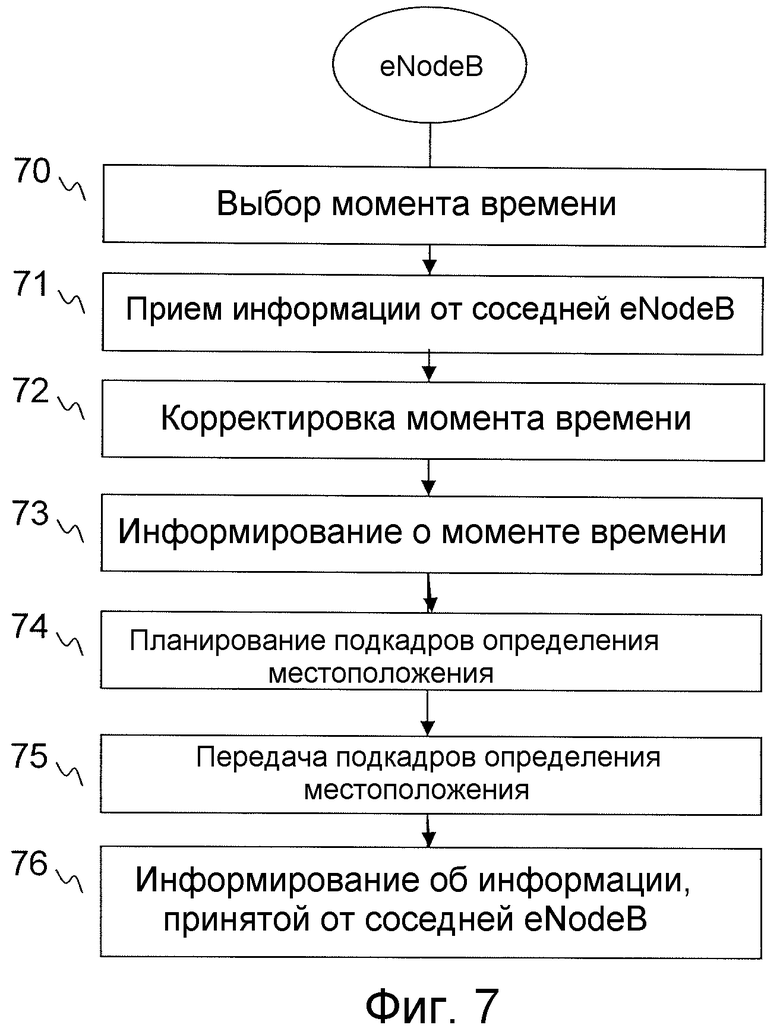
Фиг.7 иллюстрирует блок-схему последовательности операций способа для планирования подкадров определения местоположения, в котором каждый eNodeB выбирает момент времени для планирования подкадров определения местоположения, и информирует соседние eNodeB об этом моменте времени, после чего каждый eNodeB корректирует планирование подкадров определения местоположения, если это необходимо.
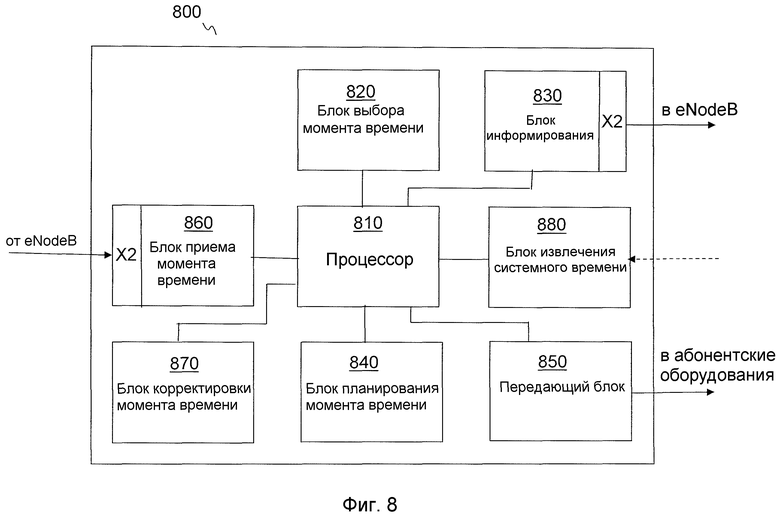
Фиг.8 является структурной блок-схемой, иллюстрирующей устройство в сетевом узле, таком как узел определения местоположения, или базовая станция.
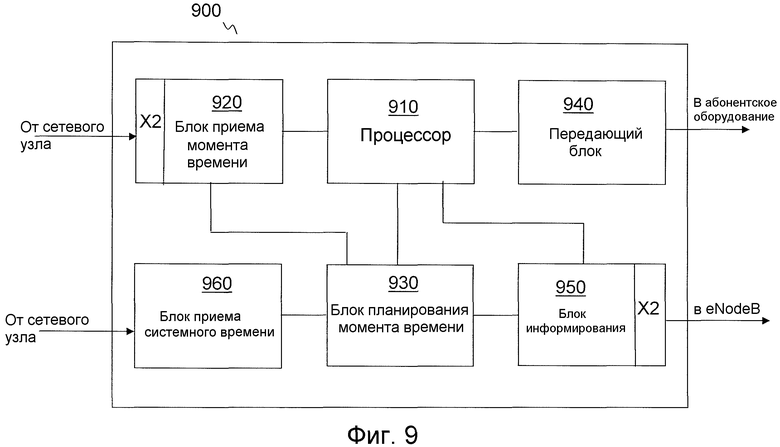
Фиг.9 является структурной блок-схемой, иллюстрирующей устройство в базовой станции.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В нижеследующем описании в целях объяснения, а не ограничения, изложены конкретные подробности, такие как конкретные последовательности этапов, протоколы сигнализации и конфигурации устройства, чтобы обеспечить полное понимание настоящего изобретения. Для специалиста в данной области техники будет очевидно, что настоящее изобретение может быть осуществлено на практике в других вариантах осуществления, которые отклоняются от этих специфических подробностей.
Более того, специалисты в данной области техники примут во внимание, что средства и функции, объясненные ниже, могут быть реализованы с использованием функциональных возможностей программного обеспечения в сочетании с программируемым микропроцессором или универсальным компьютером, и/или используя специализированную интегральную схему (ASIC). Также будет принято во внимание, что хотя настоящее изобретение в первую очередь описано в виде способов и устройств, изобретение может также быть осуществлено в компьютерном программном продукте, а также в системе, содержащей компьютерный процессор и память, соединенную с процессором, в которой в памяти закодирована одна или более программ, которые могут выполнять функции, раскрытые здесь.
Как упоминалось ранее, возможным способом определения местоположения для использования в сотовой системе беспроводной связи, такой как LTE, является разница во времени прибытия в нисходящей линии связи (DL OTDOA), использующая измерения UE по сигналам измерения, например, опорным сигналам и/или сигналам синхронизации, в нескольких сотах, в течение назначенных подкадров с низкими помехами.
Фиг.1 иллюстрирует часть сотовой системы беспроводной связи, такой как LTE, причем на фигуре сота обозначена 11, базовая станция, покрывающая соту 11, обозначена 13. Способом определения местоположения, использованным в LTE, может быть DL OTDOA, использующий измерения UE по сигналам измерения, например, опорным сигналам и/или сигналам синхронизации, в нескольких сотах 11b-11e, в течение назначенных подкадров с низкими помехами. UE 12 в обслуживающей соте 11а пытается измерять по сигналам измерения сот 11b-11e в окрестности обслуживающей соты 11а, в течение назначенных подкадров с низкими помехами, переданных из базовой станции 13а, т.е. eNodeB, в соте 11а, обслуживающей UE 12. Однако следует отметить, что соты 11b-11e не обязательно строго прилегающие соты. Способ определения местоположения DL OTDOA выполняется узлом 10 определения местоположения в сотовой системе беспроводной связи.
В несинхронизированной сети привязка по времени назначенных подкадров с низкими помехами обычно не выровнена. Таким образом, символы данных, переданные в подкадрах из eNodeB 13b-13e в соседних сотах 11b-11e, перекрываются с символами измерения сот 11b-11e, когда UE 12 выполняет попытку измерения. Это означает, что хотя назначенный подкадр с низкими помехами в обслуживающей соте удаляет самый сильный источник помех (т.е. собственные символы данных), слышимость по-прежнему является сложной проблемой. Схематичный чертеж, иллюстрирующий размещение подкадров согласно описанному предшествующему уровню техники, проиллюстрирован на Фиг.2. Область управления подкадра указана черным, символы данных - штриховкой, а символы измерения показаны в виде маленьких белых квадратов. Большой наложенный прямоугольник указывает измерительную часть, в течение которой символы данных потенциально интерферируют с символами измерения.
Настоящее изобретение предоставляет способы и устройство для планирования подкадров определения местоположения, чтобы обеспечить возможность выравнивания подкадров определения местоположения по нескольким сотам 11а-11e, чтобы снизить помехи от символов данных сот 11b-11e в окрестности соты 11а, обслуживающей UE 12, которое выполняет измерения DL OTDOA. Схематичный чертеж, иллюстрирующий размещение подкадров определения местоположения в несинхронизированной сети, реализующее настоящее изобретение, дающее грубое выравнивание, проиллюстрирован на Фиг.3.
Изобретение предоставляет способы и устройство для планирования подкадров определения местоположения, где выбирают момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. Базовые станции в сети беспроводной связи информируются о выбранном моменте времени, после чего базовые станции планируют и передают подкадры определения местоположения на основе выбранного момента времени, тем самым подкадры определения местоположения выравниваются по всей части сети беспроводной связи, в которой содержатся базовые станции.
В целях этого раскрытия термин «подкадр определения местоположения» должен быть истолкован как подкадр, который не вызывает никаких помех или вызывает ограниченное количество помех, в сочетании с другими подкадрами, передаваемыми еще одним eNodeB на том же частотном ресурсе. На практике, подкадр определения местоположения, может, например, быть подкадром, который не имеет никаких запланированных в нем данных, и который не имеет никаких данных, запланированных в его части или частях, или который имеет меньшее, чем максимальное количество данных, запланированных в нем, или в его части или частях. Подкадр определения местоположения может также быть истолкован как подкадр, содержащий, по меньшей мере, один опорный символ (иногда называемый опорным сигналом, пилотным символом или пилотным сигналом)), который назначен, чтобы дать возможность выполнять измерения, например, посредством UE. Измерения могут, например, быть использованы в целях определения местоположения. Подкадр определения местоположения может также быть подкадром MBSFN. Подкадр MBSFN является подкадром только с двумя символами OFDM (ортогонального частотного разделения) для PDCCH (физического канала управления нисходящей линии связи). Помимо этого, он может быть пустым, или содержать какую-то другую форму экземпляра опорного символа или данных.
Следует обратить внимание, что в некоторых вариантах осуществления настоящего изобретения использованы разные типы подкадров определения местоположения в задействованных eNodeB, т.е. возможно использование, например, подкадров MBSFN в некоторых eNodeB, и других типов подкадров, без данных, в других eNodeB.
На Фиг.4-9 показаны блок-схемы последовательностей операций способов и структурные блок-схемы устройств согласно вариантам осуществления настоящего изобретения.
Фиг.4 иллюстрирует блок-схему последовательности операций способа в сетевом узле и базовой станции согласно варианту осуществления настоящего изобретения. На первом этапе сетевой узел выбирает 40 момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. На следующем этапе сетевой узел информирует 41 один или несколько eNodeB 13 о выбранном моменте времени. Один или несколько eNodeB 13 принимают 42 момент времени от сетевого узла, и планируют 43 подкадры определения местоположения на основе принятого момента времени. Затем подкадры определения местоположения передают 44 одним или несколькими eNodeB 13 в соответствии с планированием, выполненным на предыдущем этапе, тем самым выравнивают подкадры определения местоположения.
В некоторых вариантах осуществления настоящего изобретения подкадры определения местоположения планируются с временем запуска, которое отклоняется менее чем или ровно на половину длины подкадра от выбранного момента времени, давая грубое выравнивание, как проиллюстрировано на Фиг.3.
Система беспроводной связи использует номера кадров глобальной системы (SFN) для основания идентификации кадров информации, переданной по системе связи. Момент времени, в течение которого должна произойти передача подкадров определения местоположения, в одном варианте осуществления связан с конкретным системным номером кадра.
Сетевой узел может быть узлом определения местоположения в LTE, который может быть отдельным сетевым узлом, или встроенным в eNodeB, или в любой другой сетевой узел. В одном варианте осуществления сетевой узел является eSMLC (усовершенствованным обсуживающим центром определения мобильного местоположения), который является либо отдельным сетевым элементом, либо представляет собой встроенную функциональную возможность в BSC, которая содержит функцию, необходимую для поддержки услуг определения местоположения.
Другой вариант осуществления показан на фиг.5, иллюстрирующей блок-схему последовательности операций способа в сетевом узле и базовых станциях. На первом этапе сетевой узел выбирает 50 момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. На следующем этапе сетевой узел информирует 51 один или несколько eNodeB 13а о выбранном моменте времени. Один или несколько eNodeB 13а принимают 52 момент времени от сетевого узла и планируют 53 подкадры определения местоположения на основе принятого момента времени. Затем подкадры определения местоположения передаются 54 одним или несколькими eNodeB 13а в соответствии с планированием, выполненным на предыдущем этапе. Один или несколько eNodeB 13а затем информируют 55 другие соседние eNodeB 13b-13e о выбранном моменте времени на дополнительном этапе способа. Один или несколько соседних eNodeB 13b-13e принимают 56 момент времени, и планируют 57 подкадры определения местоположения на основе принятого момента времени. Дополнительно, один или несколько соседних eNodeB 13b-13e передают 58 подкадры определения местоположения в соответствии с планированием, выполненным на предыдущем этапе, тем самым, подкадры определения местоположения выравниваются по всей части сети, содержащей задействованные eNodeB 13b-13e. В одном варианте осуществления настоящего изобретения подкадры определения местоположения выравниваются по всей сети беспроводной связи. В одном варианте осуществления, этап 55 информирования и этап 56 приема выполняются посредством отправления сообщения из eNodeB 13а в соседние eNodeB 13b-13e через интерфейс X2.
Еще один вариант осуществления настоящего изобретения показан на фиг.6, иллюстрирующей блок-схему последовательности операций способа, по меньшей мере, в двух базовых станциях. На первом этапе, eNodeB 13а выбирает 60 момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. На следующем этапе, eNodeB 13а информирует 61 один или несколько eNodeB 13b-13e о выбранном моменте времени. eNodeB 13а планирует 62 подкадры определения местоположения на основе принятого момента времени. Дополнительно, eNodeB 13а передает 63 подкадры определения местоположения в соответствии с планированием, выполненным на предыдущем этапе. Один или несколько eNodeB 13b-13e принимают 64 информацию о выбранном моменте времени, и планируют 65 подкадры определения местоположения на основе принятого момента времени. В заключение, один или несколько eNodeB 13b-13e передают 66 подкадры определения местоположения в соответствии с планированием, выполненным на предыдущем этапе, тем самым, подкадры определения местоположения выравниваются по всей части сети, содержащей задействованные eNodeB 13b-13e. В одном варианте осуществления, этап 61 информирования и этап 64 приема выполняются посредством отправления сообщения из eNodeB 13а в задействованные eNodeB 13b-13e через интерфейс X2.
Еще один вариант осуществления настоящего изобретения показан на Фиг.7, иллюстрирующей блок-схему последовательности операций способа в базовой станции. На первом этапе, eNodeB 13а выбирает 70 момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. На следующем этапе, eNodeB 13а принимает 71 информацию, по меньшей мере, от одного соседнего eNodeB 13b, содержащегося в сети беспроводной связи, о выбранном моменте времени, выбранном соседним eNodeB 13b. В одном варианте осуществления, этап 71 приема выполняют посредством приема сообщения от соседнего eNodeB 13b через интерфейс X2. В одном варианте осуществления, сообщение также содержит информацию о числе eNodeB в сети беспроводной связи, которые планируют подкадры определения местоположения в принятый момент времени. Затем eNodeB 13а корректирует 72 выбранный момент времени согласно принятому моменту времени на предыдущем этапе. На следующем этапе, eNodeB информирует 73 соседние eNodeB 13b о скорректированном моменте времени. В одном варианте осуществления, этап 73 информирования выполняется посредством отправления сообщения в соседний eNodeB 13b через интерфейс X2. В одном варианте осуществления, сообщение также содержит информацию о числе eNodeB в сети беспроводной связи, которые планируют подкадры определения местоположения в настроенный момент времени. eNodeB 13а планирует 74 подкадры определения местоположения на основе скорректированного момента времени. Дополнительно, eNodeB 13а передает 75 подкадры определения местоположения в соответствии с планированием, выполненным на предыдущем этапе, тем самым, подкадры определения местоположения выравниваются по всей части сети, содержащей задействованные eNodeB 13а-13b. В дополнительном варианте осуществления, eNodeB 13а информирует 76 дополнительный eNodeB 13с о скорректированном моменте времени. Очевидно, что способ может быть реализован во всей сети беспроводной связи, тем самым, подкадры определения местоположения выравниваются по всей сети.
Один пример, как может быть реализован вариант осуществления настоящего изобретения, проиллюстрированный на Фиг.7, приведен ниже. Однако также возможны и другие пути реализации настоящего изобретения.
Если число eNodeB, придерживающихся привязки по времени, т.е. момента времени, для планирования подкадров определения местоположения сообщаемых по X2 между ними, больше или равно числу eNodeB, придерживающихся привязки по времени eNodeB, т.е. момента времени, выбранного eNodeB, принимающим сообщение по X2, то принимающий eNodeB корректирует свою привязку по времени в соответствии с информацией, принятой по X2. Принимающий eNodeB также обновляет свою привязку по времени для планирования подкадров определения местоположения, если он предварительно не принял какую-либо привязку по времени по X2. После корректировки своей привязки по времени, eNodeB должен сообщить свою новую привязку по времени всем своим соседним eNodeB по X2. Более того, кроме соседних eNodeB, может также применяться другой список eNodeB.
Однако, если число eNodeB, придерживающихся привязки по времени для планирования подкадров определения местоположения, сообщенных по X2, меньше, чем число eNodeB, придерживающихся привязки по времени eNodeB, принимающего сообщение привязки по времени по X2, то принимающий eNodeB отправляет сообщение привязки по времени через X2 всем eNodeB, которые имеют другую привязку по времени для планирования подкадров определения местоположения. В случае, когда eNodeB принимает сообщение привязки по времени по X2, которая соответствует той же привязке по времени, как и в настоящее время, использованной в принимающем eNodeB для планирования подкадров определения местоположения, принимающий eNodeB обновляет свой список eNodeB, придерживающихся привязки по времени в соответствии с принятым сообщением. Принимающий eNodeB также отправляет свой список eNodeB источнику, если принимающий eNodeB имеет сведения о других eNodeB, которые имеют ту же привязку по времени, но не включены в сообщение, переданное по X2.
В некоторых упомянутых ранее вариантах осуществления извлекается момент системного времени, к которому относится выбранный и/или настроенный момент времени. Момент системного времени получают от GPS-приемника или от часов глобальной системы. Сетевой узел информирует один или несколько eNodeB 13 об информации системного времени в некоторых вариантах осуществления. В вариантах осуществления, где доступна информация системного времени, выбранный и/или настроенный момент времени относится к информации системного времени, т.е. планирование подкадров определения местоположения основано как на первом моменте времени, так и на информации системного времени.
Чтобы выполнить этапы способа для планирования подкадров определения местоположения, сетевой узел может содержать устройство 800, изображенное на фигуре 8. Устройство 800 содержит процессор 810 и блок 820 выбора момента времени, выполненный с возможностью выбора момента времени, в течение которого должна произойти передача подкадров определения местоположения. Устройство дополнительно содержит блок 830 информирования, выполненный с возможностью информирования одного или нескольких eNodeB 13а-13е об этом моменте времени.
В некотором варианте осуществления, сетевой узел, содержащий устройство, является узлом 10 определения местоположения, SMLC или eNodeB 13а.
В некотором варианте осуществления, сетевой узел является базовой станцией, т.е. eNodeB 13а, причем в устройстве 800 содержится блок 840 планирования, выполненный с возможностью планирования подкадров определения местоположения на основе момента времени. Устройство дополнительно содержит передающий блок 850, выполненный с возможностью передачи запланированных подкадров определения местоположения. В одном варианте осуществления, устройство содержит приемный блок 860, выполненный с возможностью приема информации от еще одного eNodeB 13b о моменте времени, используемом тем eNodeB 13b для планирования подкадров определения местоположения. В устройстве 800 содержится блок 870 корректировки, выполненный с возможностью корректировки момента времени согласно принятому моменту времени. В некоторых вариантах осуществления, блок 830 информирования выполнен с возможностью информирования еще дополнительного eNodeB 13с о скорректированном первом моменте времени и/или принятом моменте времени от eNodeB 13b.
Устройство 800 также содержит блок 880 извлечения, выполненный с возможностью извлечения информации системного времени, полученной от глобальных часов или GPS-приемника, в некоторых вариантах осуществления настоящего изобретения. В этих вариантах осуществления, блок 830 информирования выполнен с возможностью информирования eNodeB об информации системного времени.
Чтобы выполнить этапы способа для планирования подкадров определения местоположения, базовая станция, т.е. eNodeB 13а, может содержать устройство 900, изображенное на Фиг.9. Устройство 900 содержит процессор 910 и блок 920 приема момента времени момента времени, выполненный с возможностью приема момента времени, в течение которого должна произойти передача подкадров определения местоположения. Устройство 900 дополнительно содержит блок 930 планирования, выполненный с возможностью планирования подкадров определения местоположения на основе этого момента времени. Более того, устройство содержит передающий блок 940, выполненный с возможностью передачи запланированных подкадров определения местоположения. В некоторых вариантах осуществления, устройство дополнительно содержит блок 950 информирования, выполненный с возможностью информирования одного или нескольких eNodeB 13b-13е об этом моменте времени.
Устройство 900 также содержит приемный блок 960, выполненный с возможностью приема информации системного времени, полученной от глобальных часов или GPS-приемника из сетевого узла, в некоторых вариантах осуществления настоящего изобретения. В этих вариантах осуществления, блок 930 планирования выполнен с возможностью планирования подкадров определения местоположения на основе момента времени и информации системного времени.
Следует упомянуть, что устройство 900 содержит интерфейс X2, и в вариантах осуществления, где сетевой узел является базовой станцией, устройство 800 также содержит интерфейс X2.
Следует отметить, что настоящее изобретение применимо в LTE как в режиме дуплекса с частотным разделением (FDD), так и в режиме дуплекса с временным разделением (TDD).
Сверх того, следует отметить, несмотря на то, что для пояснения изобретения в настоящем раскрытии была использована терминология из 3GPP LTE, это не следует рассматривать как ограничение объема изобретения только вышеупомянутой системой. Другие беспроводные системы, в частности, системы на основе OFDM, такие как WiMax, также могут извлечь пользу от использования идей, охваченных в этом раскрытии.
При использовании слова «содержит» или «содержащий», его следует истолковывать в не ограничивающем значении, т.е. значении: «состоит, по меньшей мере, из».
Модификации и другие варианты осуществления раскрытого изобретения будут очевидны для специалиста в данной области техники на основе решений, представленных в вышеприведенном описании и связанных с ним чертежах. Поэтому следует понимать, что изобретение не должно быть ограничено конкретными раскрытыми вариантами осуществления, и подразумевается, что в пределы объема этого раскрытия будут включены все модификации и другие варианты осуществления. Хотя в описании могут быть применены конкретные термины, они использованы только в общем и описательном смысле, а не в целях ограничения.
Настоящее изобретение относится к способам и устройствам для определения местоположения в системе беспроводной связи, такой как LTE. Технический результат заключается в повышении точности определения местоположения. Изобретение предоставляет способы и устройства для планирования подкадров определения местоположения, т.е. подкадров с низкими помехами, чтобы позволить выравнивание подкадров определения местоположения по нескольким сотам для того, чтобы снизить помехи от символов данных сот в окрестности соты, обслуживающей UE, которое выполняет измерения определения местоположения. Выбирают момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. Базовые станции в сети беспроводной связи информируются о выбранном моменте времени, после чего базовые станции планируют и передают подкадры определения местоположения на основе выбранного момента времени, тем самым подкадры определения местоположения выравниваются по всей сети. 4 н. и 36 з.п. ф-лы, 9 ил.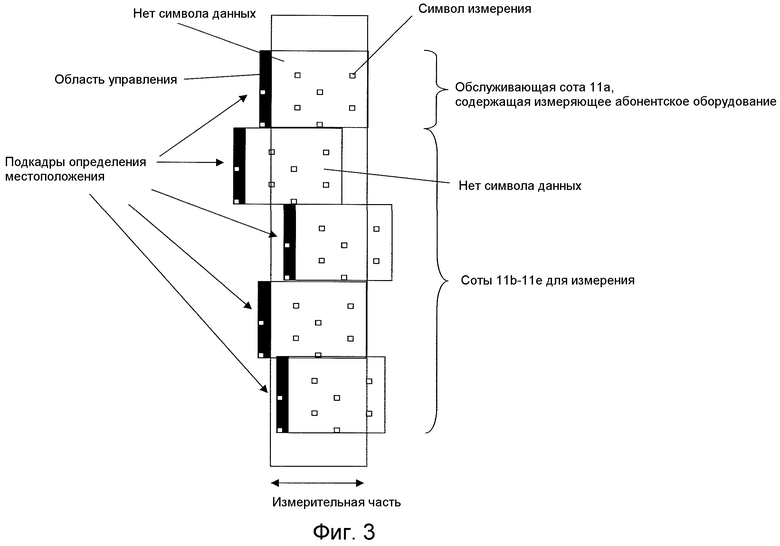
1. Способ в сетевом узле (10, 13а) для планирования подкадров определения местоположения, причем сетевой узел (10, 13а) содержится в сети беспроводной связи и соединен с по меньшей мере первой базовой станцией (13), при этом первая базовая станция (13) имеет возможность передачи подкадров определения местоположения, причем способ содержит этапы, на которых
выбирают (40, 50, 60, 70) первый момент времени, в течение которого должна произойти передача подкадров определения местоположения, причем по меньшей мере часть каждого подкадра определения местоположения не содержит данных, и первый момент времени выбирают так, что выравнивать по меньшей мере часть не содержащей данных части каждого подкадра определения местоположения с не содержащими данных частями других подкадров определения местоположения; и информируют (41, 51, 61, 73) первую базовую станцию (13) о первом моменте времени, чтобы обеспечить возможность выравнивания подкадров определения местоположения.
2. Способ по п.1, в котором подкадры определения местоположения являются подкадрами одночастотной сети многоадресной широковещательной передачи мультимедиа.
3. Способ по п.2, в котором первый момент времени связан с системным номером кадра.
4. Способ по п.1, содержащий этапы, на которых
извлекают информацию системного времени, полученную от часов глобальной системы или приемника глобальной системы определения местоположения; и
информируют первую базовую станцию (13) об информации системного времени.
5. Способ по п.1, в котором сетевой узел (10) является узлом определения местоположения.
6. Способ по п.1, в котором сетевой узел является усовершенствованным обслуживающим центром определения мобильного местоположения.
7. Способ по п.1, в котором сетевой узел (13а) является базовой станцией.
8. Способ по п.7, содержащий этапы, на которых
планируют (62, 74) подкадры определения местоположения на основе по меньшей мере первого момента времени; и
передают (63, 75) запланированные подкадры определения местоположения.
9. Способ по п.8, в котором подкадры определения местоположения планируются с временем запуска, которое отклоняется менее чем на половину длины подкадра от первого момента времени.
10. Способ по п.4, содержащий этап, на котором планируют (62, 74) подкадры определения местоположения на основе по меньшей мере первого момента времени и информации системного времени.
11. Способ по п.7, содержащий этапы, на которых
принимают (71) информацию о втором моменте времени от первой базовой станции (13b); и
корректируют (72) первый момент времени согласно принятому второму моменту времени.
12. Способ по п.11, в котором базовая станция (13a) соединена по меньшей мере со второй базовой станцией (13c) и способ содержит этап, на котором информируют (76) вторую базовую станцию (13c) по меньшей мере об одном из первого момента времени и принятого второго момента времени.
13. Способ по п.12, в котором упомянутые этапы способа по приему (71) и информированию (61, 73, 76) выполняются через интерфейс Х2.
14. Способ в базовой станции (13) для планирования подкадров определения местоположения, причем базовая станция (13) содержится в сети беспроводной связи и соединена с по меньшей мере одним сетевым узлом (10, 13a), при этом способ содержит этапы, на которых
принимают (42, 52, 64) информацию о первом моменте времени, в течение которого должна произойти передача подкадров определения местоположения от по меньшей мере одного сетевого узла (10, 13a), причем по меньшей мере часть каждого подкадра определения местоположения не содержит данных,
планируют (43, 53, 65) подкадры определения местоположения на основе по меньшей мере этого момента времени, чтобы позволить выравнивание подкадров определения местоположения, причем подкадры определения местоположения планируют так, чтобы выравнивать по меньшей мере часть не содержащей данных части каждого подкадра определения местоположения с не содержащими данных частями других подкадров определения местоположения; и
передают (44, 54, 66) запланированные подкадры определения местоположения.
15. Способ по п.14, в котором подкадры определения местоположения являются подкадрами одночастотной сети многоадресной широковещательной передачи мультимедиа.
16. Способ по п.15, в котором первый момент времени связан с системным номером кадра.
17. Способ по п.16, в котором подкадры определения местоположения планируются с временем запуска, которое отклоняется менее чем на половину длины подкадра от первого момента времени.
18. Способ по п.14, содержащий этапы, на которых
принимают информацию системного времени, полученную от часов глобальной системы или приемника глобальной системы определения местоположения; и
планируют (43, 53, 65) подкадры определения местоположения на основе по меньшей мере первой информации времени и упомянутой информации системного времени.
19. Способ по п.14, в котором упомянутый сетевой узел (10) является узлом определения местоположения.
20. Способ по п.14, в котором упомянутый сетевой узел является усовершенствованным обслуживающим центром определения мобильного местоположения.
21. Способ по п.14, в котором сетевой узел (13а) является базовой станцией.
22. Способ по п.21, в котором базовая станция (13а) соединена по меньшей мере со второй базовой станцией (13b) и способ содержит этап, на котором информируют (55) по меньшей мере вторую базовую станцию (13b) о первом моменте времени.
23. Способ по п.22, в котором упомянутые этапы способа по приему (52, 64) и информированию (61) выполняют через интерфейс Х2.
24. Устройство (800) для планирования подкадров определения местоположения, причем упомянутое устройство (800) адаптировано, чтобы содержаться в сетевом узле (10, 13а), причем сетевой узел (10, 13а) содержится в сети беспроводной связи и соединен с по меньшей мере первой базовой станцией (13), причем по меньшей мере первая базовая станция (13) имеет возможность передачи подкадров определения местоположения, при этом устройство (800) содержит
блок (820) выбора, выполненный с возможностью выбора первого момента времени, в течение которого должна произойти передача подкадров определения местоположения, причем по меньшей мере часть каждого подкадра определения местоположения не содержит данных, и первый момент времени выбирается так, чтобы выравнивать по меньшей мере часть не содержащей данных части каждого подкадра определения местоположения с не содержащими данных частями других подкадров определения местоположения; и
блок (830) информирования, выполненный с возможностью информирования по меньшей мере первой базовой станции (13) о первом моменте времени, чтобы обеспечить возможность выравнивания подкадров определения местоположения.
25. Устройство (800) по п.24, причем устройство (800) содержит
блок (880) извлечения, выполненный с возможностью извлечения информации системного времени, полученной от часов глобальной системы или приемника глобальной системы определения местоположения; и
блок (830) информирования, выполненный с возможностью информирования по меньшей мере первой базовой станции (13) об информации системного времени.
26. Устройство (800) по п.24, в котором сетевой узел (10) является узлом определения местоположения.
27. Устройство (800) по п.24, в котором сетевой узел является усовершенствованным обслуживающим центром определения мобильного местоположения.
28. Устройство (800) по п.24, в котором сетевой узел (13а) является базовой станцией.
29. Устройство (800) по п.28, причем устройство (800) содержит
блок (840) планирования, выполненный с возможностью планирования подкадров определения местоположения на основе по меньшей мере первого момента времени; и
передающий блок (850), выполненный с возможностью передачи запланированных подкадров определения местоположения.
30. Устройство (800) по п.29, причем устройство (800) содержит
блок (840) планирования, выполненный с возможностью планирования подкадров определения местоположения на основе по меньшей мере первой информации времени и информации системного времени.
31. Устройство (800) по п.28, причем устройство (800) содержит
приемный блок (860), выполненный с возможностью приема информации о втором моменте времени от по меньшей мере первой базовой станции (13b); и
блок (870) корректировки, выполненный с возможностью корректировки первого момента времени согласно принятому второму моменту времени.
32. Устройство (800) по п.31, в котором базовая станция (13а) соединена с по меньшей мере второй базовой станцией (13с), причем устройство (800) содержит
блок (830) информирования, выполненный с возможностью информирования по меньшей мере второй базовой станции (13с) о по меньшей мере одном из первого момента времени и принятого второго момента времени.
33. Устройство (800) по п.28, причем устройство (800) содержит интерфейс Х2.
34. Устройство (900) для планирования подкадров определения местоположения, причем упомянутое устройство (900) адаптировано, чтобы содержаться в базовой станции (13), причем базовая станция (13) содержится в сети беспроводной связи и соединена с по меньшей мере одним сетевым узлом (10, 13а), при этом устройство (900) содержит приемный блок (920), выполненный с возможностью приема информации о первом моменте времени, в течение которого должна произойти передача подкадров определения местоположения от по меньшей мере одного сетевого узла (10, 13а), причем по меньшей мере часть каждого подкадра определения местоположения не содержит данных;
блок (930) планирования, выполненный с возможностью планирования подкадров определения местоположения на основе по меньшей мере первого момента времени, чтобы обеспечить возможность выравнивания подкадров определения местоположения, причем подкадры определения местоположения планируются так, чтобы выравнивать по меньшей мере часть не содержащей данных части каждого подкадра определения местоположения с не содержащими данных частями других подкадров определения местоположения; и
передающий блок (940), выполненный с возможностью передачи запланированных подкадров определения местоположения.
35. Устройство (900) по п.34, причем устройство (900) содержит:
приемный блок (960), выполненный с возможностью приема информации системного времени, полученной от часов глобальной системы или приемника глобальной системы определения местоположения; и
блок (930) планирования, выполненный с возможностью планирования подкадров определения местоположения на основе по меньшей мере первой информации времени и информации системного времени.
36. Устройство (900) по п.34, в котором упомянутый сетевой узел (10) является узлом определения местоположения.
37. Устройство (900) по п.34, в котором упомянутый сетевой узел является усовершенствованным обслуживающим центром мобильного определения местоположения.
38. Устройство (900) по п.34, в котором базовая станция (13а) соединена с по меньшей мере второй базовой станцией (13b), и при этом устройство (900) содержит
блок (950) информирования, выполненный с возможностью информирования по меньшей мере второй базовой станции (13b) о первом моменте времени.
39. Устройство (900) по п.34, в котором сетевой узел (13а) является базовой станцией.
40. Устройство (900) по п.34, причем устройство (900) содержит интерфейс Х2.
| WO 03007508 A1, 23.01.2003 | |||
| WO 2007031103 A1, 22.03.2007 | |||
| ПЕРЕДАЧА ДАННЫХ ДЛЯ МОБИЛЬНЫХ УСТРОЙСТВ БЕСПРОВОДНОЙ СВЯЗИ | 2002 |
|
RU2292671C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

