Изобретение относится, в основном, к способам и системам информационного взаимодействия бортовых электронно-вычислительных машин с периферийными устройствами, в частности с навигационными приборами и устройствами.
Известен способ передачи данных между измерительным преобразователем и управляющим устройством и линия связи для его осуществления (см. заявку на изобретение №2010131405 А, В66С 23/88, 10.02.2012 г.), принятый за прототип. Способ передачи данных между измерительным преобразователем и управляющим устройством включает преобразование измерительных и управляющих сигналов в электрические сигналы с последовательным кодом и передачу электрических сигналов по двум проводным гальванически развязанным линиям связи. В качестве гальванической развязки используют два разнесенных приемопередающих модуля, подключенные через проводные линии связи к измерительному преобразователю и управляющему устройству и связанные между собой с помощью радиоканала с образованием беспроводной линии связи.
Линия связи между измерительным преобразователем и управляющим устройством содержит две локальные проводные гальванически развязанные линии связи, включающие в себя двухпроводную линию обмена данными и двухпроводную линию электропитания. Гальваническая развязка проводных линий связи выполнена на двух разнесенных приемопередающих модулях, подключенных через локальные проводные линии связи в виде переходных кабелей к измерительному преобразователю и управляющему устройству и связанных между собой с помощью радиоканала с образованием беспроводной линии связи.
Передача информации по проводным и беспроводной линиям связи и формирование пакетов для передачи данных по указанным линиям осуществляются согласно протоколам передачи данных.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы;
- недостаточная степень надежности бесперебойности работы с используемой операционной системой компьютера.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационной системы комплекса топопривязки и навигации.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ, обеспечивающего выполнение необходимых режимов работы аппаратуры, ее информационное взаимодействие с бортовой ЭВМ и в конечном итоге определение достоверных навигационных параметров: широты места, долготы места и высоты места объекта, истинных значений курса, крена и тангажа объекта.
Указанный технический результат достигается тем, что в предлагаемом способе информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ, включающем в себя преобразование, передачу, прием измерительных и управляющих сигналов по проводным и беспроводным линиям связи согласно протоколу информационного взаимодействия, новым является то, что протокол информационного взаимодействия обеспечивает работу автономной аппаратуры топопривязки и навигации (ААТН) в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ», для чего передача информации между бортовой ЭВМ и ААТН осуществляется двоичным цифровым последовательным кодом в асинхронном режиме по линии последовательного обмена стандарта ЕIА RS-232С в соответствии с 3-проводным вариантом и импульсным периодическим сигналом метки времени, выдаваемым от бортовой ЭВМ в ААТН, по 2-проводной линии связи, информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием ААТН данных от бортовой ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из ААТН в бортовую ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма. Обеспечение протоколом информационного взаимодействия работы автономной аппаратуры топопривязки и навигации (ААТН) в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ» позволяет:
- обеспечить подготовку ААТН к выполнению решения задач по назначению;
- обеспечить начальное ориентирование объекта, на котором установлена ААТН;
- обеспечить определение параметров навигации объекта при его движении и на стоянке;
- обеспечить проверку работоспособности и состояния ААТН, контроль принимаемых тестовых параметров от сопрягаемых систем.
Передача информации между бортовой ЭВМ и ААТН двоичным цифровым последовательным кодом в асинхронном режиме по линии последовательного обмена стандарта ЕIА RS-232С в соответствии с 3-проводным вариантом и импульсным периодическим сигналом метки времени, выдаваемым от бортовой ЭВМ в ААТН, по 2-проводной линии связи позволяет:
- обеспечить необходимую скорость передачи информации;
- частоту выдачи массива данных.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
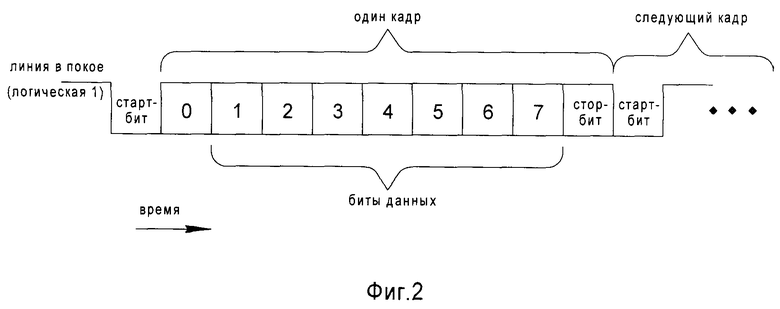
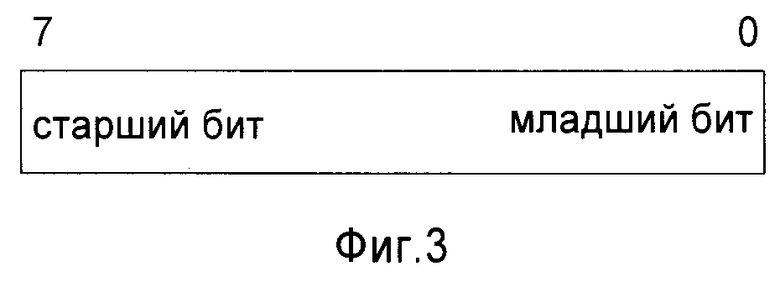
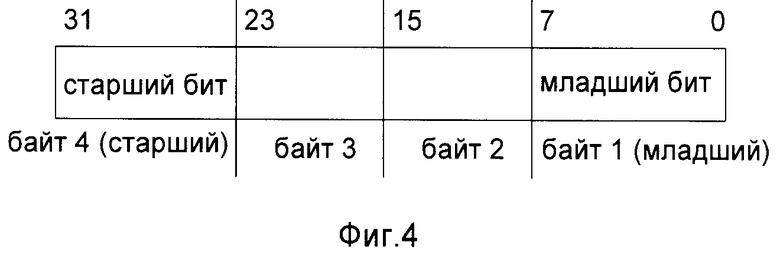
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема подключения ААТН к бортовой ЭВМ; на фиг.2 - последовательность передачи информации в одном кадре; на фиг.3 - формат «Unsigned char»; на фиг.4 - формат «Unsigned long integer»; на фиг.5 - формат «Binari 16»; на фиг.6 - формат «Float»; на фиг.7 - формат «Double».
Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ реализуется следующим образом.
ААТН 1 работает в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ».
Режим «ОЖИДАНИЕ» начинается с момента подачи электропитания на ААТН 1 и продолжается вплоть до получения от бортовой ЭВМ 2 команды «ПОДГОТОВКА К РАБОТЕ».
Режим «ПОДГОТОВКА К РАБОТЕ» начинается с момента получения вышеуказанной команды при наличии достоверных данных о координатах текущего места объекта и продолжается 5 мин при внешней температуре не менее +5°С (при наличии признака «Внешняя температура не менее +5°С» от бортовой ЭВМ 2).
Режим «ВЫСТАВКА» начинается с момента окончания режима «ПОДГОТОВКА К РАБОТЕ» при наличии достоверных данных о координатах текущего места объекта и/или истинного курса объекта и продолжается 6 мин. В процессе работы в режиме «ВЫСТАВКА» ААТН 1 осуществляет определение углов ориентации методом гирокомпасирования (при отсутствии от бортовой ЭВМ 2 команды «Выставка по заданному курсу» и достоверной информации об истинном курсе объекта) или методом выставки по заданному курсу (при наличии от бортовой ЭВМ 2 команды «Выставка по заданному курсу» и достоверной информации об истинном курсе объекта).
При каждом запуске режима «ВЫСТАВКА» ААТН 1 выполняет режим «ТЕСТ-КОНТРОЛЬ» при подаче командного слова «ТЕСТ-КОНТРОЛЬ». В режиме «ТЕСТ-КОНТРОЛЬ» ААТН 1 выполняет собственную проверку, контроль принимаемых тестовых параметров от сопрягаемых систем и выдает состояние ААТН 1 пользователю по интерфейсным каналам. Окончание режима «ТЕСТ-КОНТРОЛЬ» проводится по снятию командного слова «ТЕСТ - КОНТРОЛЬ» и при снятии питания. Кроме этого, программные средства ААТН 1 позволяют организовать контроль исправности ААТН в течение всего времени работы (в режимах «ВЫСТАВКА», «НАВИГАЦИЯ»).
Режим «НАВИГАЦИЯ» является основным режимом работы ААТН 1, начинающимся с момента окончания режима «ВЫСТАВКА» и длящимся вплоть до отключения электропитания. Возможны следующие подрежимы: «Автономная навигация», «Навигация с коррекцией по скорости», «Интегрированная навигация» и «Остановка».
Передача информации между бортовой ЭВМ 2 и ААТН 1 осуществляется двоичным цифровым последовательным кодом в асинхронном режиме по линии последовательного обмена стандарта EIA RS-232C и импульсным периодическим сигналом метки времени, выдаваемым от бортовой ЭВМ 2 в ААТН 1. Бортовая ЭВМ 2 соединяется с ААТН 1 по последовательному интерфейсу 3 в соответствии с 3-проводным вариантом стандарта EIA RS-232C.
Скорость передачи информации, вид паритета, количество битов данных, а также старт- и стоп-битов в кадре являются фиксированными параметрами линии:
- скорость передачи информации: 115200 бит/с;
- паритет: отсутствует;
- количество старт-битов: 1;
- количество стоп-битов: 1;
- количество бит данных: 8;
- частота выдачи массива данных (совокупности кадров) от бортовой ЭВМ 2: не менее 1 Гц;
- частота выдачи массива данных (совокупности кадров) от
AATH 1: не менее 1 Гц.
ААТН 1 получает от бортовой ЭВМ 2 импульсный сигнал метки времени по 2-проводной линии связи 4. Метка времени и ее «оцифровка» (кодовое значение времени), поступающая в ААТН 1 от бортовой ЭВМ 2 по линии связи 4, используются в ААТН 1 в качестве сигнала точного времени, необходимого для определения московского времени на момент измерения в ААТН 1 параметров ориентации и навигации и выдачи значения этого времени в бортовую ЭВМ для взаимной временной привязки показаний всего комплекса оборудования объекта.
Первичное кодирование передаваемой информации осуществляется в бортовой ЭВМ 2 согласно таблице 1.
В комплекс оборудования объекта входят аппаратура спутниковой навигации (АСН), система определения высоты (СОВ), датчик скорости механический (ДСМ), датчик скорости доплеровский (ДСД) (на чертежах не показаны).
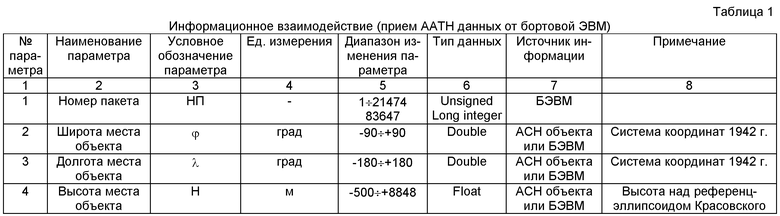
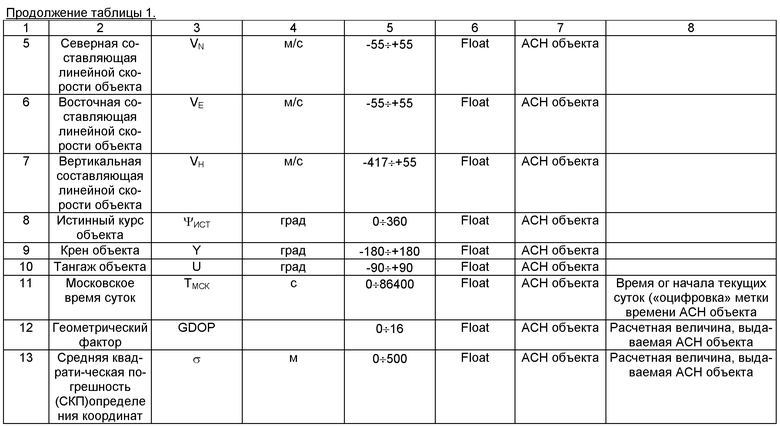
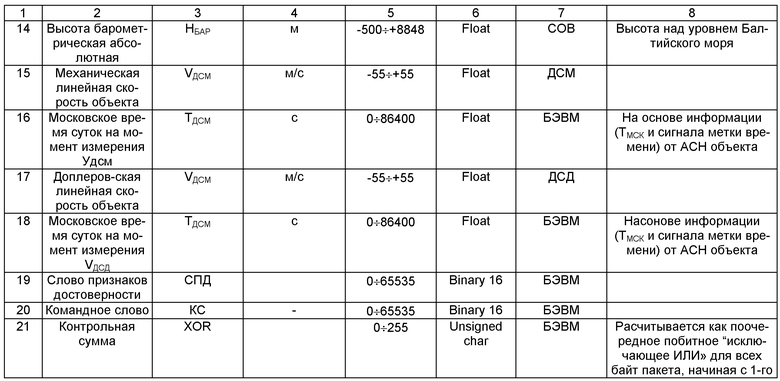
Слово признаков достоверности:
бит 0:1=параметры №№2, 3 достоверны;
бит 1:1=параметр №4 достоверен;
бит 2:1=параметры №№5, 6, 7 достоверны;
бит 3:1=параметр №8 достоверен;
бит 4:1=параметры №№9, 10 достоверны;
бит 5:1=параметры №№11, 16, 18 достоверны;
бит 6:1=параметры №№12, 13 достоверны;
бит 7:1=параметр №14 достоверен;
бит 8:1=параметр №15 достоверен;
бит 9:1=параметр №17 достоверен;
биты 10÷15: резерв (устанавливаются в 0).
Нулевое значение в битах 0÷9 свидетельствует о недостоверности соответствующего(их) параметра(ов).
Командное слово:
бит 0: резерв (устанавливается в 0);
бит 1:1 = команда «Подготовка к работе», 0= до или после режима «ПОДГОТОВКА К РАБОТЕ»;
бит 2:1 = команда «Выставка по заданному курсу»: ААТН 1 при достоверности истинного курса АСН объекта по окончании режима «ПОДГОТОВКА К РАБОТЕ» должен произвести выставку по методу выставки по заданному курсу;
бит 3:1 = команда «Автономная навигация»: ААТН 1 должен отключить коррекцию информации от внешних источников, 0= в подрежимах, отличных от подрежима «Автономная навигация»;
бит 4:1 = команда «Навигация с коррекцией по скорости»: ААТН 1 должен использовать для коррекции достоверную информацию только о скорости от внешних источников, 0= в подрежимах, отличных от подрежима «Навигация с коррекцией по скорости;
бит 5:1 = команда «Интегрированная навигация»: ААТН 1 должен использовать для коррекции всю доступную достоверную информацию от внешних источников, 0= в подрежимах, отличных от подрежима «Интегрированная навигация»;
бит 6:1 = команда «Остановка»: выдается оператором бортовой ЭВМ 2 на ААТН 1 при неподвижном объекте с целью проведения коррекции ААТН 1 по неподвижному положению, 0= в подрежимах, отличных от подрежима «Остановка»;
бит 7:1 = признак «Внешняя температура не менее +5°С», 0= признак «Внешняя температура менее +5°С»;
биты 8÷15: резерв (устанавливаются в 0).
Вторичное кодирование полученных байт данных осуществляется в бортовой ЭВМ согласно протоколу Serial Line Internet Protocol-SLIP.
При передаче данных от ААТН 1 на бортовую ЭВМ 2 первичное кодирование осуществляется ААТН 1 согласно таблице 2. Вторичное кодирование полученных байт данных осуществляется в ААТН 1 согласно протоколу SLIP.
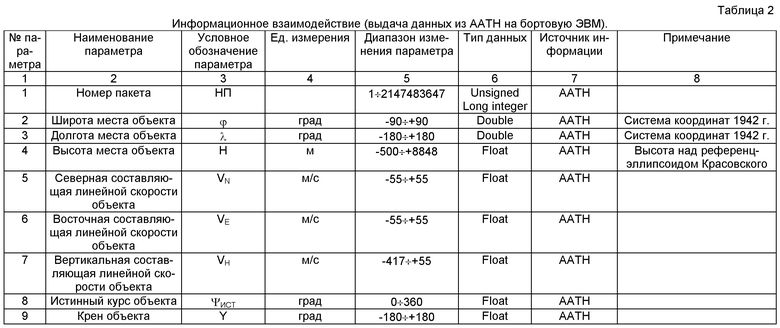
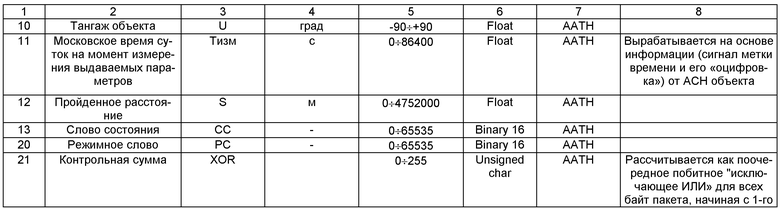
Слово состояния: нулевое значение слова состояния соответствует исправности AATH 1 по результатам непрерывного тест-контроля, ненулевые значения - отказу AATH 1.
Режимное слово:
бит 0:1=AATH 1 в режиме ожидания команды «Подготовка к работе» от бортовой ЭВМ 2, 0=AATH 1 в режиме, отличном от режима ожидания команды «Подготовка к работе» от AATH 1;
бит 1:1=AATH 1 в режиме «ПОДГОТОВКА К РАБОТЕ» (в соответствии с командой от бортовой ЭВМ 2), 0=AATH 1 в режиме, отличном от режима «ПОДГОТОВКА К РАБОТЕ»;
бит 2:1=AATH 1 в режиме «ВЫСТАВКА» по методу выставки по заданному курсу (в соответствии с командой от бортовой ЭВМ 2 при наличии достоверной информации об истинном курсе объекта), 0=AATH 1 в режиме «ВЫСТАВКА» по методу гирокомпасирования или в режиме, отличном от режима «ВЫСТАВКА»;
бит 3:1=AATH 1 в подрежиме «Автономная навигация» (в соответствии с командой от бортовой ЭВМ 2 или при отсутствии достоверной информации от внешних источников), 0=AATH 1 в подрежиме, отличном от режима «Автономная навигация»;
бит 4:1=AATH 1 в подрежиме «Навигация с коррекцией по скорости»: для коррекции используется информация о скорости от внешних источников в соответствии с признаками достоверности, 0=AATH 1 в подрежиме, отличном от подрежима «Навигация с коррекцией по скорости»;
бит 5:1=AATH 1 в подрежиме «Интегрированная навигация»: для коррекции используется вся доступная достоверная информация от внешних источников в соответствии с признаками достоверности, 0=AATH 1 в подрежиме, отличном от подрежима «Интегрированная навигация»;
бит 6:1=AATH 1 в подрежиме «Остановка» производит коррекцию по неподвижному положению объекта в соответствии с командой от бортовой ЭВМ 2, 0=AATH 1 в подрежиме, отличном от подрежима «Остановка»;
бит 7:1=признак «Внешняя температура не менее +5°С», 0= признак «Внешняя температура менее +5°С».
Тип данных «Unsigned char» («беззнаковый 1-байтный») используется для представления положительных целочисленных величин в диапазоне от 0 до +255 или нормированных величин (см. фиг.3).
Тип данных «Unsigned Long integer» («длинный беззнаковый целый») используется для представления положительных целочисленных величин в диапазоне 0-4294967295 (см. фиг.4).
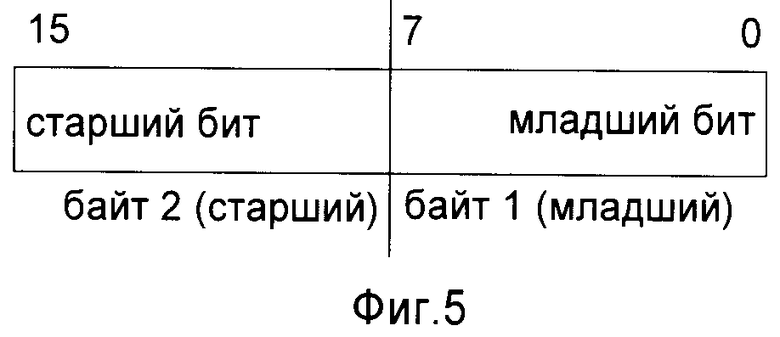
Тип данных «Binary 16» («16-разрядный двоичный») используется для представления кодовых величин из 16 битовых полей. Значения данных такого типа определяются индивидуально в каждом случае использования (см. фиг.5).
Тип данных «Float» («вещественный») используется для представления вещественных чисел с плавающей запятой в диапазоне ±3.40282347·1038 (см. фиг.6).
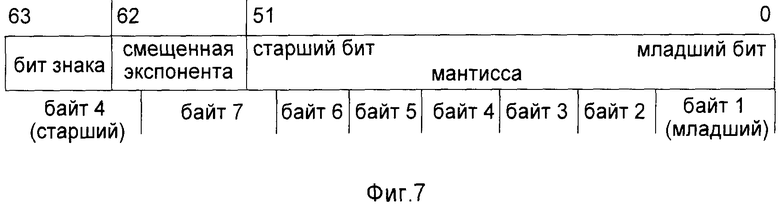
Тип данных «Double» («расширенный вещественный») используется для представления вещественных чисел с плавающей запятой в диапазоне ±1.7976931348623167·10308 и точностью 15 десятичных цифр (см. фиг.7).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой ЭВМ, обеспечивающего выполнение необходимых режимов работы аппаратуры, ее информационное взаимодействие с бортовой ЭВМ и в конечном итоге определение достоверных навигационных параметров: широты места, долготы места и высоты места объекта, истинных значений курса, крена и тангажа объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса | 2016 |
|
RU2635214C1 |
| Способ информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления | 2016 |
|
RU2621964C1 |
| Способ информационно-технического сопряжения составных частей мобильного робототехнического комплекса | 2016 |
|
RU2639249C1 |
| Универсальный способ обмена навигационно-временной информацией в образцах военной техники Сухопутных войск | 2017 |
|
RU2674937C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |

Изобретение относится к способам информационного взаимодействия бортовых электронно-вычислительных машин с периферийными устройствами, в частности с навигационными приборами и устройствами. Техническим результатом является повышение эффективности и надежности работы информационной системы за счет определения достоверных навигационных параметров: широты места, долготы места и высоты места объекта, истинных значений курса, крена и тангажа объекта. Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой ЭВМ включает в себя преобразование, передачу, прием измерительных и управляющих сигналов по проводным и беспроводным линиям связи согласно протоколу информационного взаимодействия, который обеспечивает работу автономной аппаратуры топопривязки и навигации в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ», причем информационное взаимодействие осуществляется в соответствии с заданными перечнями параметров, для каждого из которых определен соответствующий тип данных. 7 ил., 2 табл.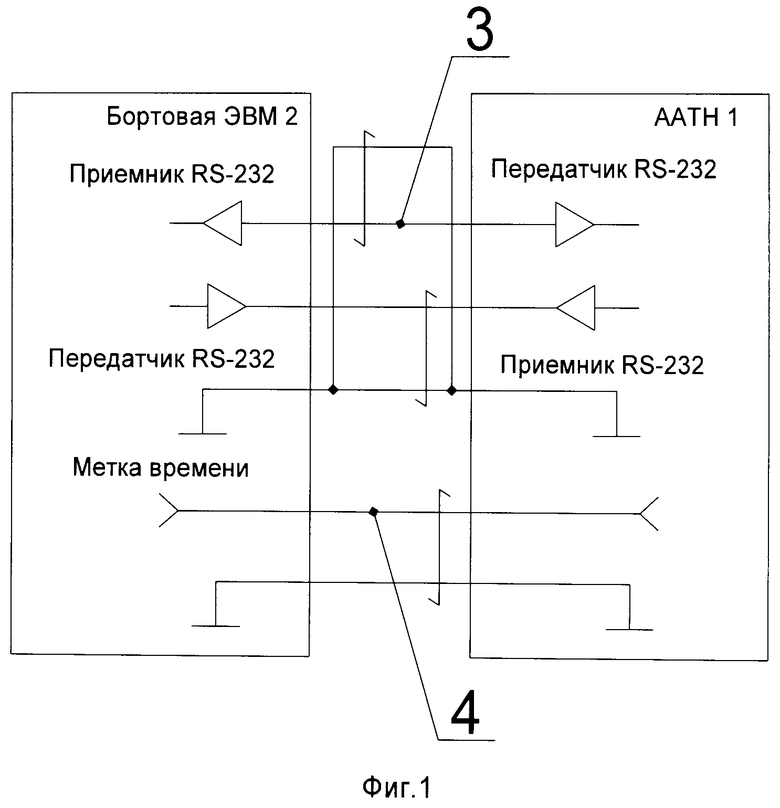
Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой ЭВМ, включающий в себя преобразование, передачу, прием измерительных и управляющих сигналов по проводным и беспроводным линиям связи согласно протоколу информационного взаимодействия, отличающийся тем, что протокол информационного взаимодействия обеспечивает работу автономной аппаратуры топопривязки и навигации (ААТН) в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ», для чего передача информации между бортовой ЭВМ и ААТН осуществляется двоичным цифровым последовательным кодом в асинхронном режиме по линии последовательного обмена стандарта EIA RS - 232С в соответствии с 3-проводным вариантом и импульсным периодическим сигналом метки времени, выдаваемым от бортовой ЭВМ в ААТН, по 2-проводной линии связи, информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием ААТН данных от бортовой ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из ААТН в бортовую ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма.
| RU 2010131405 A, 10.02.2012 | |||
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| Способ экспандирования заготовок,преимущественно из сталей,сплавов на железной,железоникелевой и никелевой основах | 1980 |
|
SU996047A1 |
| Устройство циклического приоритета | 1989 |
|
SU1640690A1 |

