Изобретение относится к способам и системам информационного взаимодействия бортовых информационно-вычислительных средств с периферийными устройствами, в частности с блоком управления двигателями.
Известен способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ (см. №2510585, Н04L 29/00, 27.03.2014 г.), принятый за прототип. Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации с бортовой ЭВМ включает в себя преобразование, передачу, прием измерительных и управляющих сигналов по линиям связи согласно протокола информационного взаимодействия. Протокол информационного взаимодействия обеспечивает работу аппаратуры топопривязки и навигации в различных режимах. Передача информации между бортовой ЭВМ и системой топопривязки и навигации осуществляется двоичным цифровым последовательным кодом в асинхронном режиме. Информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием ААТН данных от бортовой ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из ААТН в бортовую ЭВМ - номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма.
Недостатками прототипа являются:
- недостаточная четкость в организации логического взаимодействия информационных потоков;
- сложная структура командных и ответных сообщений.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационно-технического взаимодействия информационно-управляющего вычислителя с блоком управления двигателями мобильного роботизированного комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса, обеспечивающего прием и передачу информации между информационно-управляющим вычислителем и блоком управления двигателями мобильного робототехнического комплекса.
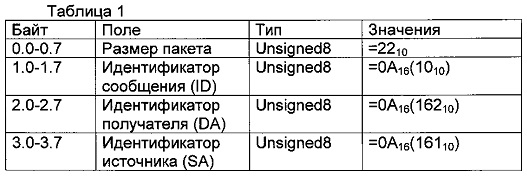
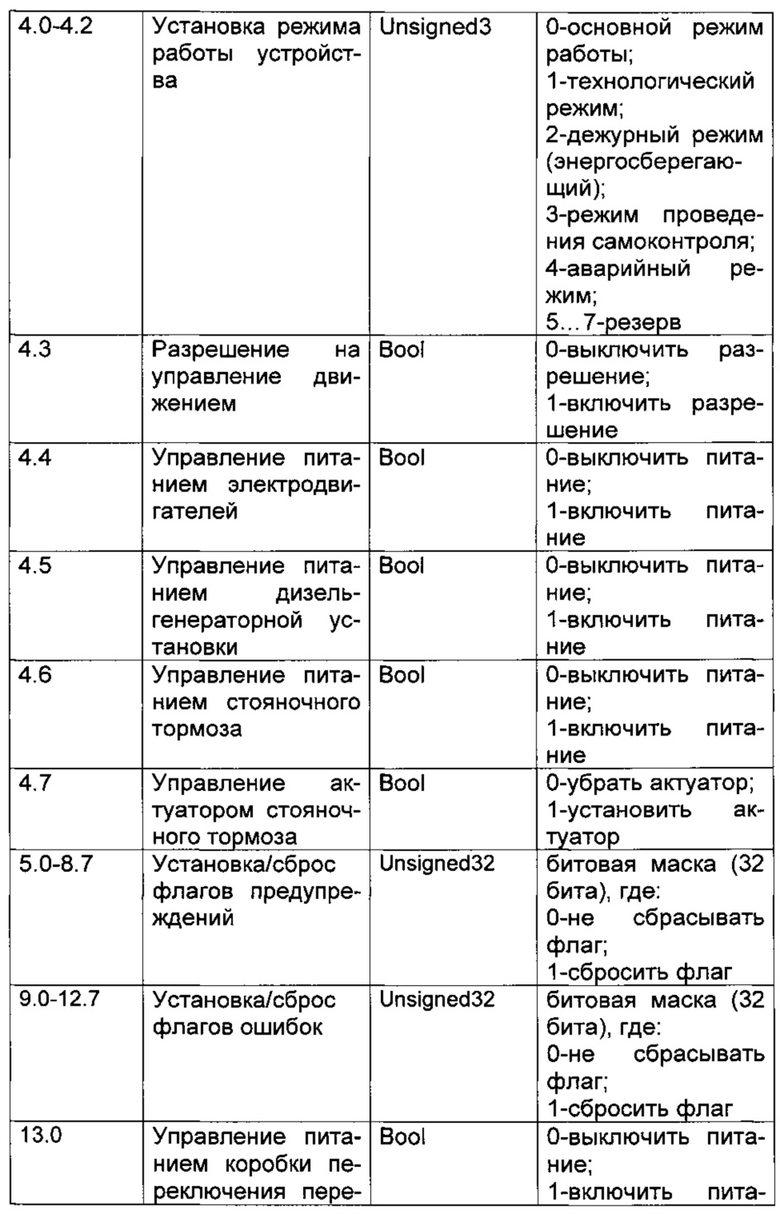
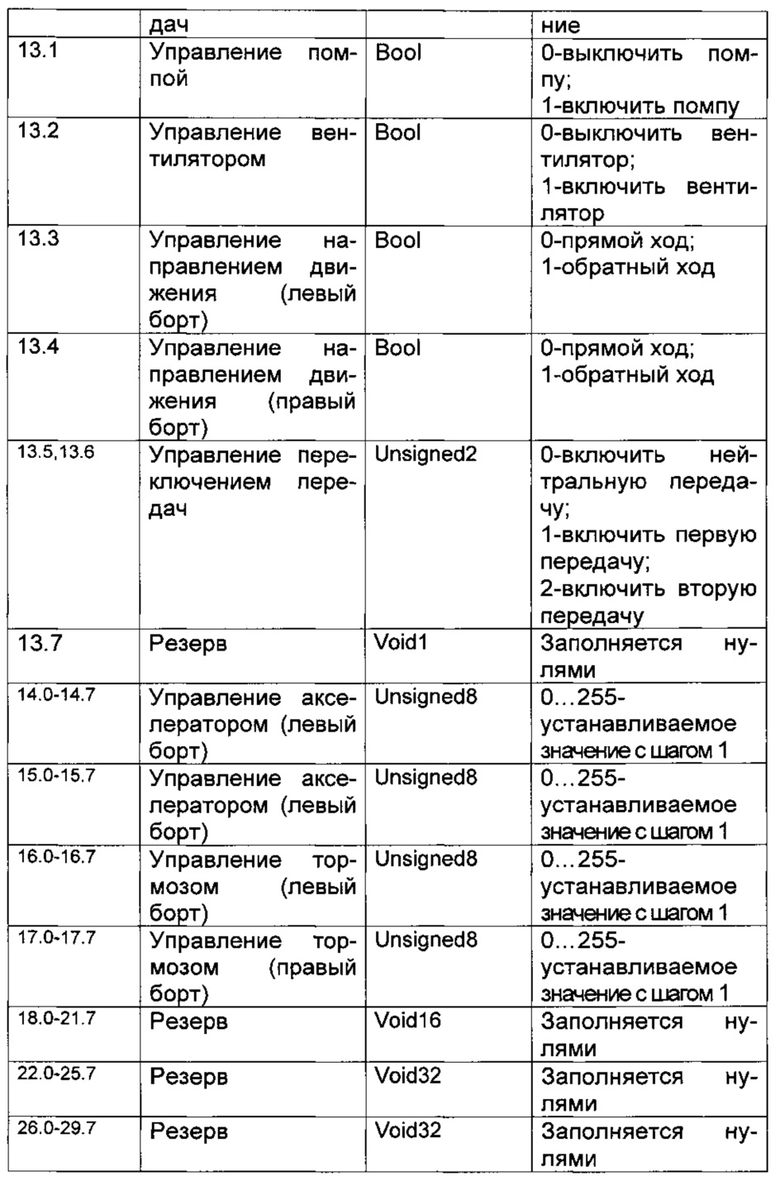
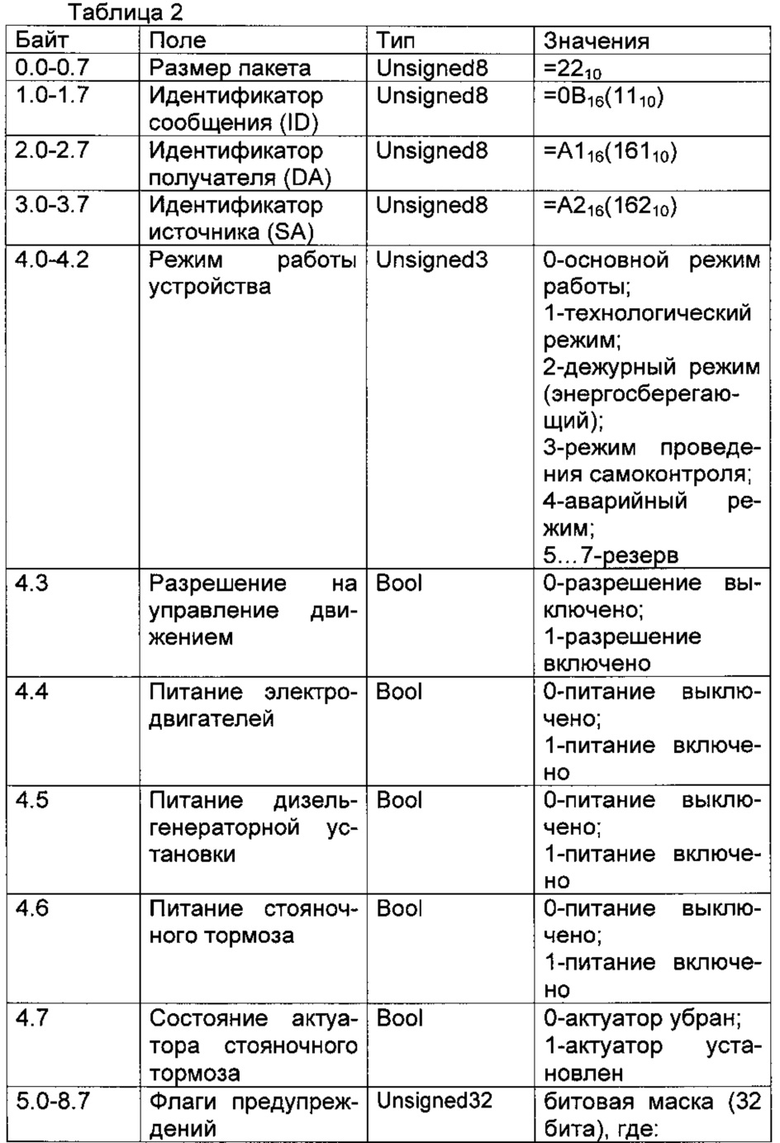
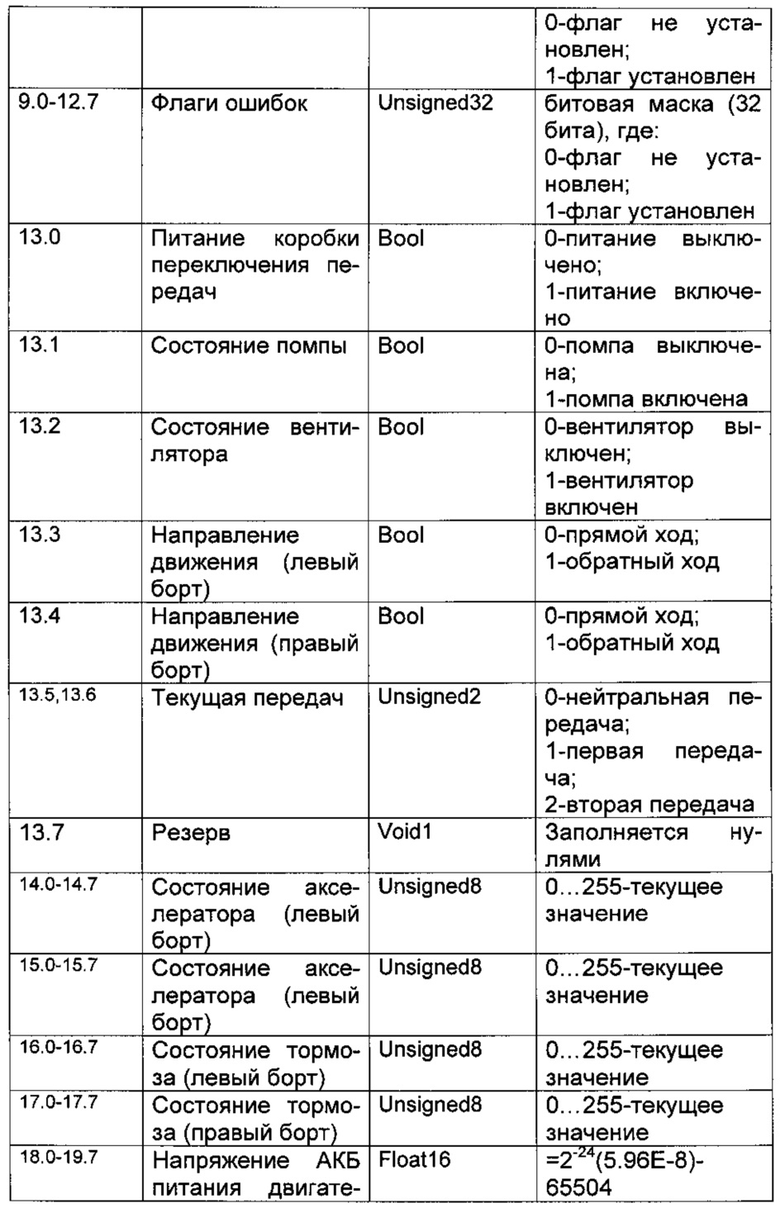
Указанный технический результат достигается тем, что в способе информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса, обеспечивающем согласно протоколу сопряжения прием и передачу информации через вычислительные средства по каналам связи на терминалы управления - автоматизированные рабочие места и периферийные устройства комплекса, пакетную передачу данных, новым является то, что управление параметрами и режимами блока управления двигателями мобильного роботизированного комплекса осуществляется посредством передачи в информационный поток сообщения CONTROL, в ответ на это сообщение блок управления двигателями передает в информационный поток сообщение RECONTROL, команда управления CONTROL имеет следующую конфигурацию: поле команды содержит сведения о размере передаваемого пакета, блок сведений об именах задач и информационных потоков - идентификаторе сообщения (ID), идентификаторе получателя (DA) и идентификаторе источника (SA), блок командных сообщений по установке в блоке управления двигателями режимов работы: основного, технологического, дежурного, самоконтроля и аварийного, запрос на получение разрешения на управление движением самодвижущейся платформы комплекса, блок командных сообщений по управлению включением/выключением питания агрегатов самодвижущейся платформы комплекса: электродвигателей приводов движения, дизель-генераторной установки, стояночного тормоза, помпы, вентилятора и коробки переключения передач, блок командных сообщений по управлению агрегатами самодвижущейся платформы комплекса: актуатором стояночного тормоза, приводами левого и правого бортов, коробкой переключения передач, акселераторами левого и правого бортов и тормозами левого и правого бортов, блок командных сообщений по установке/сбросу флагов предупреждений и ошибок, ответ на команду управления RECONTROL имеет следующую конфигурацию: поле команды содержит сведения о размере передаваемого пакета, блок сведений об именах задач и информационных потоков - идентификаторах сообщения, получателя и источника, блок ответных сообщений по установленному в блоке управления двигателями режима работы, ответ на запрос на получение разрешения на управление движением комплекса, блок ответных сообщений по выполнению операции включения/выключения питания агрегатов самодвижущейся платформы комплекса, блок ответных сообщений по отработке агрегатами самодвижущейся платформы комплекса полученных команд, блок ответных сообщений по фактическому наличию предупреждений и ошибок при работе комплекса, блок сообщений о техническом состоянии аккумуляторных батарей.
Осуществление управление параметрами и режимами блока управления двигателями мобильного роботизированного комплекса посредством передачи в информационный поток командных и ответных сообщений позволяет:
- организовать информационный обмен между информационно-управляющим вычислителем и блоком управления двигателями;
- получать постоянные телеметрические данные о состоянии агрегатов комплекса.
Введение в структуру команды CONTROL блок командных сообщений по установке в блоке управления двигателями режимов работы позволяет:
- эксплуатировать двигатели во всем диапазоне его технических возможностей;
- проводить самотестирование их технического состояния;
- выбирать наиболее экономичный режим эксплуатации.
Введение в структуру команды CONTROL запроса на получение разрешения на управление движением самодвижущейся платформы комплекса позволяет:
- убрать все принудительные блокировки на начало выполнения движения платформы;
- начать движение после устранения всех причин, вызывающих появление в поле команды запрещающих предупреждений и ошибок.
Введение в структуру команды CONTROL блока командных сообщений по управлению включением/выключением питания агрегатов самодвижущейся платформы комплекса позволяет подготовить к эксплуатации ее основные системы, позволяющие выполнять задачи по назначению.
Введение в структуру команды CONTROL блока командных сообщений по управлению агрегатами самодвижущейся платформы комплекса позволяет управлять непосредственно исполнительными механизмами движителя платформы, скоростью движения платформы.
Введение в структуру команды CONTROL блока командных сообщений по установке/сбросу флагов предупреждений и ошибок позволяет операторам, управляющим мобильным робототехническим комплексом своевременно устранить нештатные ситуации при эксплуатации.
Введение в структуру команды RECONTROL блока ответных сообщений по установленному в блоке управления двигателями режима работы позволяет получить подтверждение выполнения выбранного режима работы.
Введение в структуру команды RECONTROL ответа на запрос на получение разрешения на управление движением комплекса позволяет при наличии положительного ответа начать движение комплекса.
Введение в структуру команды RECONTROL блока ответных сообщений по выполнению операции включения/выключения питания агрегатов самодвижущейся платформы комплекса позволяет получить подтверждение готовности к работе агрегатов.
Введение в структуру команды RECONTROL блока ответных сообщений по отработке агрегатами самодвижущейся платформы комплекса полученных команд позволяет получить подтверждение выполнения отправленных команд на исполнительные устройства.
Введение в структуру команды RECONTROL блока ответных сообщений по фактическому наличию предупреждений и ошибок при работе комплекса позволяет оценить готовность к выполнению задач и техническое состояние комплекса.
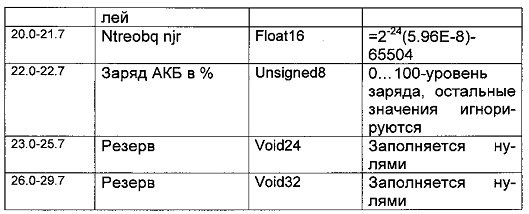
Введение в структуру команды RECONTROL блока сообщений о техническом состоянии аккумуляторных батарей позволяет оценить техническое состояние аккумуляторных батарей: напряжение питания, текущий ток, заряд батарей в %.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса на основе соответствующего протокола реализуется следующим образом.
Основой мобильного робототехнического комплекса является самодвижущая платформа, состоящая из корпуса, силовой установки, движителя и системы управления. В данном случае в качестве силовой установки выбрана гибридная силовая установка. Дизель-генераторная установка заряжает блок аккумуляторных батарей, с которого напряжение поступает на блок управления электродвигателями приводов.
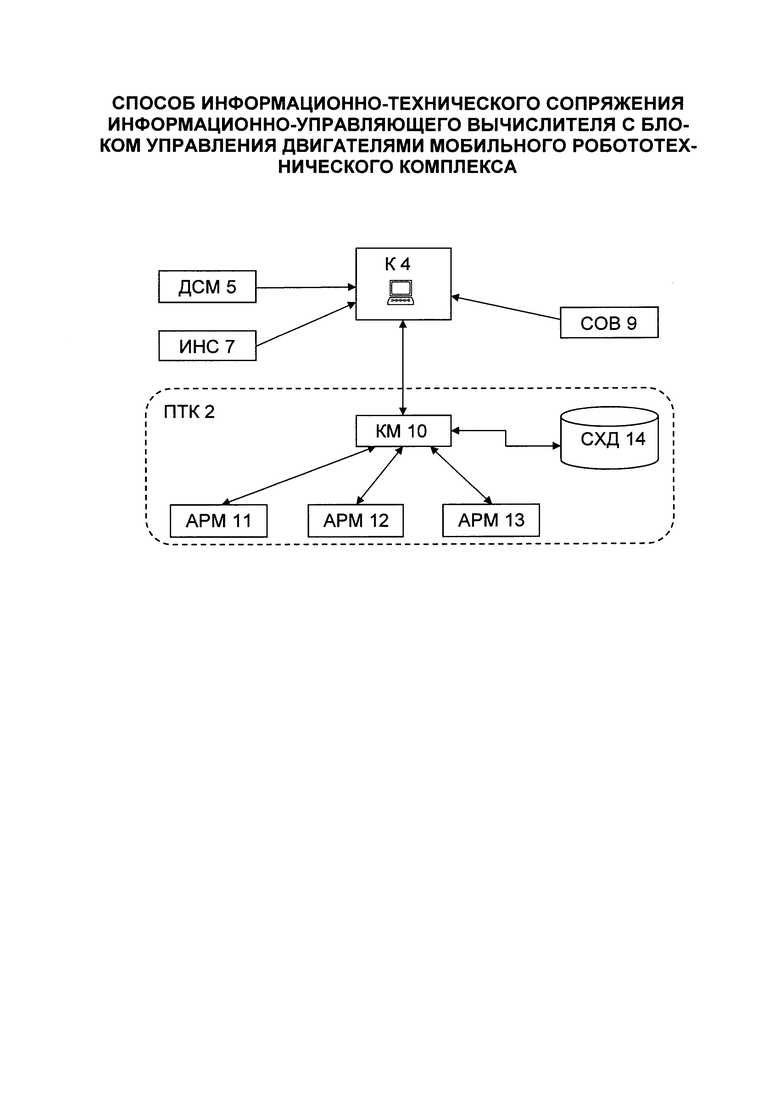
Способ определяет порядок приема и передачи информации между информационно-управляющим вычислителем (ИУВ) и блоком управления двигателем (БУД). Сопряжение ИУВ и БУД осуществляется посредством сетевого маршрутизатора Ethernet.
Физическое взаимодействие организовано следующим образом:
- стандарт интерфейса: Fast Ethernet IEEE 802.3u;
- физический интерфейс: витая пара UTP Cat.5 (5е);
- скорость обмена: 100 Мбит/с.
Логическая организация взаимодействия
БУД принимает и передает информацию из следующих информационных потоков:
- информационный поток команд и запросов, поступающий в БУД - cbdud;
- информационный поток ответов на запросы и команды, поступающий от БУД - tbdud.
БУД имеет сетевой адрес: статический IP-адрес, UDP-порт для приема команд управления от ИУВ.
Управление параметрами и режимами работы БУД
БУД управляется посредством передачи в информационный поток сообщения CONTROL. В ответ на сообщение CONTROL БУД передает в информационный поток сообщения RETCONTROL. Сообщение CONTROL передается периодически, даже при неизменном состоянии органов управления - для постоянного получения телеметрии в сообщении RETCONTROL. Периодичность определяется стороной ИУВ и лежит в диапазоне 20-50 Гц.
Команда управления CONTROL имеет структуру, приведенную в таблице 1.
Ответ на команду управления RETCONTROL имеет структуру, приведенную в таблице 2.
Типы данных
Битовой последовательностью b длиной n назовем упорядоченный набор битов длиной от 0 до n, где 0≤n≤64. Каждый бит последовательности обозначается индексом:
b=b0b1b2…bn-1
Для битовых последовательностей определены операции конкатенации (+) и инверсии (~). Битовая последовательность длиной n преобразуется и передается на физическом уровне в виде последовательности октетов длиной l=[n/8]. Биты старшего октета, номера которого превышают n, не содержат битов передаваемой последовательности, их значение не определено.

Тип VOIDn
Здесь n - целое число, 0≤n≤64. Данные типа VOIDn представляются битовой последовательностью длиной n.
Тип UNSIGNEDn
Тип предназначен для хранения положительных целых в диапазоне 0, 1, 2, …, 2n-1. Тип представляется битовой последовательностью длиной n. Битовая последовательность b=b0b1b2…bn-1 соответствует значению:
UNSIGNEDn(b)=bn-1(21bn-1)+…+b121+b0
Тип UNTEGERn
Тип предназначен для хранения целых значений в диапазоне - 2n-1, … 2n-1-1. Битовая последовательность b=b0b1b2…bn-1 соответствует значению:
UNTEGERn(b)=bn-2(21bn-2)+…+b121+b0, если bn-1=0
UNTEGERn(b)=-UNTEGERn(~b)+1, если bn-1=1
Тип STRINGn
Тип STRING предназначен для хранения строковых данных и определяется следующим образом:
ARRAY [n] OF UNSIGNED8 STRINGn
Каждый элемент массива представляет собой код символа в соответствии с таблицей ASCII и кодировкой KOI8-R.
Тип Bool
Тип Bool предназначен для хранения логических значений, может принимать следующие значения: 0 и 1.
Тип Float16
Тип Float16 предназначен для хранения вещественных чисел с плавающей запятой половинной точности в соответствии со стандартом IEEE 754. Данный тип занимает 16 байт в памяти. Формат представления данных:

Порядок записан со сдвигом -15. Чтобы получить актуально значение порядка нужно вычесть из него сдвиг. Сдвиг можно получить по формуле 2b-1-1, где b - число бит, отведенное на хранение порядка (в случае числа половинной точности b=5).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса, обеспечивающего прием и передачу информации между информационно-управляющим вычислителем и блоком управления двигателями мобильного робототехнического комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ информационно-технического сопряжения составных частей мобильного робототехнического комплекса | 2016 |
|
RU2639249C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Способ информационно-технического взаимодействия системы топопривязки и навигации с программно-техническим комплексом наземного пункта управления | 2016 |
|
RU2621964C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА БОЕВОГО ПРИМЕНЕНИЯ | 2013 |
|
RU2523874C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБМЕНА С ИСПОЛЬЗОВАНИЕМ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ БОЕВОЙ РОБОТИЗИРОВАННОЙ ПЛАТФОРМЫ | 2013 |
|
RU2546061C1 |
Изобретение относится к способам и системам информационного взаимодействия бортовых информационно-вычислительных средств с периферийными устройствами, в частности с блоком управления двигателями. Технический результат заключается в повышении надежности взаимодействия вычислителя с блоком управления двигателями мобильного роботизированного комплекса. В способе обеспечивают прием и передачу информации через вычислительные средства по каналам связи на терминалы управления - автоматизированные рабочие места и периферийные устройства комплекса, пакетную передачу данных, управление параметрами и режимами блока управления двигателями мобильного роботизированного комплекса посредством передачи в информационный поток сообщения CONTROL, в ответ на это сообщение блок управления двигателями передает в информационный поток сообщение RECONTROL. Ответ на команду управления RECONTROL, поле команды содержит сведения о размере передаваемого пакета, блок ответных сообщений по установленному в блоке управления двигателями режима работы, ответ на запрос на получение разрешения на управление движением комплекса, блок ответных сообщений по фактическому наличию предупреждений и ошибок при работе комплекса. 1 ил., 2 табл.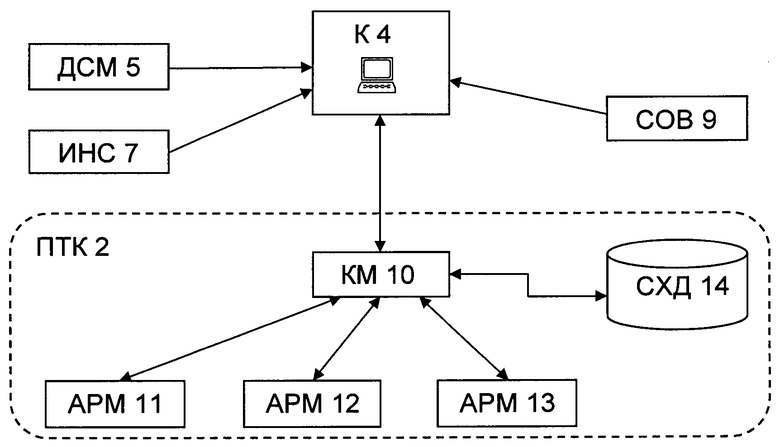
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса, обеспечивающий согласно протоколу сопряжения прием и передачу информации через вычислительные средства по каналам связи на терминалы управления - автоматизированные рабочие места и периферийные устройства комплекса, пакетную передачу данных, отличающийся тем, что управление параметрами и режимами блока управления двигателями мобильного роботизированного комплекса осуществляется посредством передачи в информационный поток сообщения CONTROL, в ответ на это сообщение блок управления двигателями передает в информационный поток сообщение RE-CONTROL, команда управления CONTROL имеет следующую конфигурацию: поле команды содержит сведения о размере передаваемого пакета, блок сведений об именах задач и информационных потоков - идентификаторе сообщения (ID), идентификаторе получателя (DA) и идентификаторе источника (SA), блок командных сообщений по установке в блоке управления двигателями режимов работы: основного, технологического, дежурного, самоконтроля и аварийного, запрос на получение разрешения на управление движением самодвижущейся платформы комплекса, блок командных сообщений по управлению включением/выключением питания агрегатов самодвижущейся платформы комплекса: электродвигателей приводов движения, дизель-генераторной установки, стояночного тормоза, помпы, вентилятора и коробки переключения передач, блок командных сообщений по управлению агрегатами самодвижущейся платформы комплекса: актуатором стояночного тормоза, приводами левого и правого бортов, коробкой переключения передач, акселераторами левого и правого бортов и тормозами левого и правого бортов, блок командных сообщений по установке/сбросу флагов предупреждений и ошибок, ответ на команду управления RECONTROL имеет следующую конфигурацию: поле команды содержит сведения о размере передаваемого пакета, блок сведений об именах задач и информационных потоков - идентификаторах сообщения, получателя и источника, блок ответных сообщений по установленному в блоке управления двигателями режима работы, ответ на запрос на получение разрешения на управление движением комплекса, блок ответных сообщений по выполнению операции включения/выключения питания агрегатов самодвижущейся платформы комплекса, блок ответных сообщений по отработке агрегатами самодвижущейся платформы комплекса полученных команд, блок ответных сообщений по фактическому наличию предупреждений и ошибок при работе комплекса, блок сообщений о техническом состоянии аккумуляторных батарей.
| СПОСОБ ИНФОРМАЦИОННОГО ВЗАИМОДЕЙСТВИЯ АВТОНОМНОЙ АППАРАТУРЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И БОРТОВОЙ ЭВМ | 2012 |
|
RU2510585C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| Способ полуколичественного спектрального анализа | 1960 |
|
SU142055A1 |
| Устройство для установки верхнего валка автоматичесого стана | 1976 |
|
SU633452A3 |

