Изобретение относится к системе автоматизации со средством управления автоматизации, по меньшей мере одним периферийным блоком и системой шины, а также к способу управления подобной системой автоматизации.
Известные системы автоматизации данного типа часто базируются на так называемой коммуникации «ведущий-ведомый» между средством управления автоматизацией и управляемыми им периферийными блоками. При этом средство управления автоматизацией берет на себя роль ведущего, а периферийные блоки - роли ведомых. Ведущий осуществляет связь через систему шины с ведомыми, в то время как ведомые не осуществляют связь между собой или осуществляют ее лишь ограниченным образом. Системы автоматизации, к которым предъявляются высокие требования готовности оборудования, например для автоматизации рельсовых транспортных средств, должны обеспечивать возможность воспринимать отказы или недостаток готовности к управлению автоматизацией или компенсировать их.
В основе изобретения лежит задача предложить систему автоматизации с улучшенной надежностью функционирования. Кроме того, в основе изобретения лежит задача предложить способ для надежного управления подобной системой автоматизации.
Задача решается в соответствии с изобретением касательно системы автоматизации - признаками пункта 1 формулы изобретения, а касательно способа - признаками пункта 4 формулы изобретения.
Предпочтительные варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения.
Соответствующая изобретению система автоматизации имеет первое средство управления автоматизацией и резервное второе средство управления автоматизацией. Кроме того, она имеет по меньшей мере один периферийный блок и систему шины, которая соединяет оба средства управления автоматизацией и по меньшей мере один периферийный блок. По меньшей мере один периферийный блок подключен к системе шины посредством соответствующего модуля подключения к шине. Модуль подключения к шине содержит первый контроллер шины, который ассоциирован с первым средством управления автоматизацией и через систему шины соединен с ним, второй контроллер шины, который ассоциирован со вторым средством управления автоматизацией и через систему шины соединен с ним, и блок переключения для переключения между обоими контроллерами шины.
За счет того, что система автоматизации имеет два однотипных средства управления автоматизацией, отказ или недоступность одного из средств управления автоматизацией компенсируются вторым средством управления автоматизацией. Это предпочтительным образом повышает надежность работы системы автоматизации.
За счет того, что модули подключения к шине периферийных блоков имеют, соответственно, два контроллера шины, которые соответственно ассоциированы с другим из обоих средств управления автоматизацией и соединены с ним, при смене средства управления автоматизацией, управляющего системой автоматизации, принимающее управление средство управления автоматизацией может очень быстро полностью через ассоциированные с ним контроллеры шины получить доступ к периферийным блокам, так как соединение с этими контроллерами шины уже существует и не должно только еще устанавливаться. За счет этого время переключения при смене средства управления автоматизацией сокращается, что является особенно предпочтительным, если к системе автоматизации предъявляются высокие требования по надежности с короткими временами переключения.
Уменьшение времени переключения достигается при этом предпочтительным образом при незначительных затратах аппаратных средств и без дополнительных затрат программного обеспечения, так как только число контроллеров шины увеличивается, в то время как все другие компоненты модулей подключения к шине и периферийные блоки остаются неизменными.
В предпочтительном выполнении система шины является системой промышленной шины.
Тем самым системой автоматизации реализуются известные предпочтительные свойства системы промышленной шины. В частности, сокращаются затраты на прокладку кабелей и стоимость, достигается высокая надежность и доступность за счет коротких сигнальных путей и простая возможность расширения и изменения системы автоматизации.
Предпочтительным образом первый контроллер шины модуля подключения к шине непосредственно подключен к системе шины, а второй контроллер шины соединен с первым контроллером шины и через это соединение косвенным образом подключен к системе шины.
Тем самым требуется подключать к системе промышленной шины только один из обоих контроллеров шины модуля подключения к шине, так что подключение модуля подключения к шине к системе шины по отношению к одному модулю подключения к шине с только одним контроллером шины не должно изменяться. За счет этого затраты аппаратных средств для второго контроллера шины предпочтительным образом сокращаются и реализация соответствующей изобретению системы автоматизации упрощается.
В соответствующем изобретению способе для управления соответствующей изобретению системой автоматизации в зависимости от ситуации выбирается одно из обоих средств управления автоматизацией для управления системой автоматизации. Кроме того, в модуле подключения к шине по меньшей мере одного периферийного блока для доступа к периферийному блоку выбирается тот контроллер шины, который ассоциирован со средством управления автоматизацией, выбранным для управления системой автоматизации.
За счет зависимого от ситуации выбора одного из средств управления автоматизацией для управления системой автоматизации управление может согласовываться с обусловленными ситуацией требованиями. В особенности, система автоматизации при отказе или недоступности средства управления автоматизацией может соответственно управляться с помощью другого средства управления автоматизацией, за счет чего, как описано выше, предпочтительным образом повышается надежность функционирования системы автоматизации.
Выбор контроллера шины, ассоциированного с соответствующим управляющим средством управления автоматизацией, для доступа этого средства управления автоматизацией к периферийному блоку обеспечивает возможность упомянутого выше предпочтительного сокращения времен переключения при смене управляющего средства управления автоматизацией.
В одном выполнении способа система автоматизации управляется посредством первого средства управления автоматизацией, если оно доступно для управления и готово для эксплуатации, и посредством второго средства управления автоматизацией, если первое средство управления автоматизацией не готово для эксплуатации или недоступно.
За счет этого простым и эффективным способом доступное и готовое для эксплуатации средство управления автоматизацией выбирается для надежного в эксплуатации управления системой автоматизации.
Предпочтительным образом доступность и готовность к эксплуатации каждого из средств управления автоматизацией непрерывно контролируется.
За счет этого может надежно и своевременно распознаваться отказ или недоступность средства управления автоматизацией и, при необходимости, управление системой автоматизации передается соответственно другому средству управления автоматизацией.
Выполнение способа предусматривает при этом, что оба средства управления автоматизацией взаимно контролируются на доступность и готовность к эксплуатации.
Тем самым доступность и готовность к эксплуатации средств управления автоматизацией контролируется самими средствами управления автоматизацией, так что не требуется никакого дополнительного средства контроля.
Кроме того, контроллерам шины модуля подключения к шине по меньшей мере одного периферийного блока предпочтительным образом через систему шины сообщается о каждой смене средства управления автоматизацией, выбранного для управления системой автоматизации.
Тем самым контроллерам шины незамедлительно указывается на смену управляющего средства управления автоматизацией, так что доступ к периферийным блокам может переключаться на те контроллеры шины, которые ассоциированы со средством управления автоматизацией, к которому перешло управление.
Альтернативно или дополнительно, контроллерам шины модуля подключения к шине по меньшей мере одного периферийного блока предпочтительно циклически, с заданными временными интервалами по системе шины сообщается, какое из обоих средств управления автоматизацией в текущий момент выбрано для управления системой автоматизации.
Это также позволяет контроллерам шины распознавать смену управляющего средства управления автоматизацией и реагировать на нее. Если применяется циклическое уведомление контроллера шины дополнительно к уведомлению при каждой смене управляющего средства управления автоматизацией, то могут, кроме того, предпочтительным образом компенсироваться ошибки передачи, например, потеря сообщения о произошедшей смене управляющего средства управления автоматизацией.
Другое предпочтительное альтернативное или дополнительное выполнение способа предусматривает, что при смене контроллера шины, получающего доступ к по меньшей мере одному периферийному блоку, принимающему доступ контроллеру шины от передающего доступ контроллера шины сообщается текущее системное состояние по меньшей мере одного периферийного блока.
В случае смены управляющего средства управления автоматизацией и связанного с этим переключения на ассоциированный с этим средством управления автоматизацией контроллер шины, контроллеру шины, который принимает на себя доступ к периферийному блоку, от передающего ему доступ контроллера шины могут передаваться важные информации, которые необходимы для безошибочного доступа к периферийному блоку. Тем самым принимающему доступ контроллеру шины не требуется сначала самому определять эти информации, за счет чего время переключения дополнительно предпочтительным образом сокращается. Подобные информации представляют собой, например, информации о вставке и удалении модулей на периферийном блоке или установках и операциях записи, которые предпринимались периферийным блоком на передающем доступ контроллере шины, как, например, конфигурации портов или запись информации диагностики.
Дополнительные признаки и детали изобретения далее описываются на примерах выполнения со ссылками на чертежи, на которых показано следующее:
Фиг. 1 - блок-схема системы автоматизации с двумя средствами управления автоматизацией и тремя соединенными с ними через систему шины модулями подключения к шине периферийных блоков и
Фиг. 2 - блок-схема модуля подключения к шине с двумя контроллерами шины периферийного блока и одним модулем подключения к шине.
Соответствующие друг другу части на всех чертежах снабжены одинаковыми ссылочными позициями.
На фиг. 1 схематично показана блок-схема системы 1 автоматизации с двумя средствами 3.1, 3.2 управления автоматизацией и тремя соединенными с ними через систему шины 4 модулями 5.1, 5.2, 5.3 подключения к шине подробно не представленных периферийных блоков.
Система 1 автоматизации может, например, представлять собой систему для управления дверями рельсового транспортного средства. Возможный периферийный блок может в этом примере представлять собой, например, средство управления дверями для автоматического управления автоматическим закрыванием и открыванием двери рельсового транспортного средства. Изобретение, однако, не зависит от конкретных задач системы 1 автоматизации и периферийных блоков.
Средства 3.1, 3.2 управления автоматизацией выполнены как однотипные процессоры для управления периферийными блоками посредством соответствующей операционной системы или по меньшей мере одной прикладной программы.
Система 4 шины выполнена как система промышленной шины, например, как так называемая Profibus (высокоскоростная шина цифрового технологического оборудования).
Средства 3.1, 3.2 управления автоматизацией с помощью соответствующего переключающего блока 6.1, 6.2 подключены к системе шины 4.
Каждый модуль 5.1, 5.2, 5.3 подключения к шине содержит два однотипных контроллера 7.1, 7.2 шины для управления обменом данными по системе шины 4. При этом первый контроллер 7.1 шины ассоциирован с первым средством 3.1 управления автоматизацией и постоянно соединен с ним через систему шины 4. Соответствующим образом, второй контроллер 7.2 шины ассоциирован с вторым средством 3.2 управления автоматизацией и постоянно соединен с ним через систему шины 4.
При этом в показанном на фиг. 1 примере выполнения первый модуль 5.1 подключения к шине и второй модуль 5.2 подключения к шине через их соответствующий первый контроллер 7.1 шины непосредственно подключены к системе шины 4, в то время как третий модуль 5.3 подключения к шине лишь косвенным образом через первый модуль 5.1 подключения к шине, с которым он соединен через дополнительное соединение 8 данных, подключен к системе шины 4. Изобретение допускает варианты осуществления с соответственно расширенными или измененными сетевыми соединениями модулей 5.1, 5.2, 5.3 подключения к шине. Кроме того, в альтернативных примерах выполнения контроллеры 7.1, 7.2 шины одного или нескольких из модулей 5.1, 5.2, 5.3 подключения к шине также могут быть подключены последовательно к системе шины 4.
Оба переключающих блока 6.1, 6.2 имеют соответственно третий контроллер 7.3 шины для управления его обменом данными по системе 4 шины, и оба средства 3.1, 3.2 управления автоматизацией имеют, соответственно, четвертый контроллер 7.4 шины.
При этом устанавливается избыточность (резервирование) по управлению, которая состоит в том, что от обоих средств 3.1, 3.2 управления автоматизацией одновременно устанавливаются соединения данных к периферийным блокам и поддерживаются установленными. За счет существования этих соединений данных, из-за выполнения с резервированием средств 3.1, 3.2 управления автоматизацией, посредством переключения между этими средствами 3.1, 3.2 управления автоматизацией может обеспечиваться возможность достаточно быстрого времени переключения; если бы эти соединения данных нужно было устанавливать только при переключении, то требования к коротким временам переключения, например, в секундном диапазоне, не выполнялись бы.
За счет двух контроллеров 7.1, 7.2 шины в каждом модуле 5.1, 5.2, 5.3 подключения к шине становится возможным, что каждое средство 3.1, 3.2 управления автоматизацией точно поддерживает одно соединение к периферийным блокам, причем каждый первый и второй контроллер 7.1, 7.2 шины точно ассоциирован с одним средством 3.1, 3.2 управления автоматизацией. При этом средства 3.1, 3.2 управления автоматизацией наблюдают отдельные экземпляры соответствующего периферийного блока, представленные обоими контроллерами 7.1, 7.2 шины. При этом каждый модуль 5.1, 5.2, 5.3 подключения к шине и каждый периферийный блок как аппаратное средство, однако, предпочтительным образом имеются лишь однократно, так что дублирование аппаратных средств остается ограниченным только контроллерами 7.1, 7.2 шины.
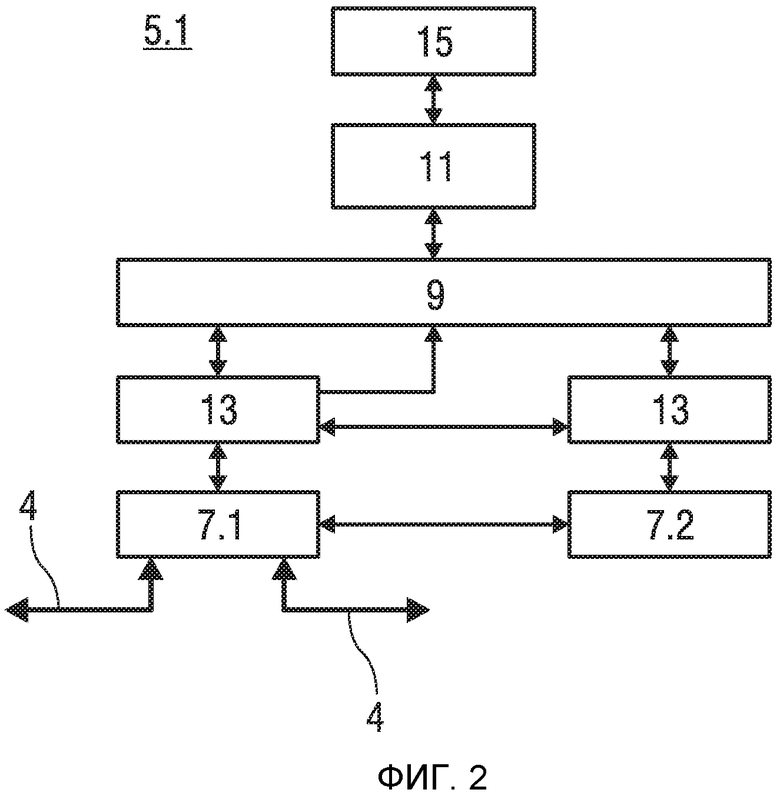
Фиг. 2 показывает более детально первый модуль 5.1 подключения к шине в виде блок-схемы. Другие модули 5.2, 5.3 подключения к шине выполнены аналогичным образом.
Первый модуль 5.1 подключения к шине содержит первый контроллер 7.1 шины, второй контроллер 7.2 шины, блок 9 переключения и блок 11 памяти. Оба контроллера 7.1, 7.2 шины управляются соответственно посредством программного обеспечения 13 контроллера шины. Блок 11 памяти управляется посредством драйвера 15 памяти.
Первый контроллер 7.1 шины непосредственно подключен к системе 4 шины, в то время как второй контроллер 7.2 шины соединен с первым контроллером 7.1 шины и через это соединение косвенным образом подключен к системе шины 4.
Каждое программное обеспечение 13 контроллера шины управляет для своего контроллера 7.1, 7.2 шины собственной стековой памятью и собственным шлюзом, через который соответствующий контроллер 7.1, 7.2 шины постоянно осуществляет связь с ассоциированным средством 3.1, 3.2 управления автоматизацией.
За счет описанного ниже более подробно управления с резервированием и соединения между обоими контроллерами 7.1, 7.2 шины первому модулю 5.1 подключения к шине сообщается, какое из обоих средств 3.1, 3.2 управления автоматизацией в данный момент выполняет процесс, то есть какое средство 3.1, 3.2 управления автоматизацией в данный момент управляет системой 1 автоматизации. В соответствии с этой информацией через блок 9 переключения блок 11 памяти и, тем самым, также подключенный к первому модулю 5.1 подключения к шине периферийный блок ассоциируются с одним из обоих контроллеров 7.1, 7.2 шины. Через соединение между обоими контроллерами 7.1, 7.2 шины осуществляется обмен информациями, которые требуются в случае переключения между обоими контроллерами 7.1, 7.2 шины.
Посредством описанного выше управления резервированием регулируется то, какое из обоих средств 3.1, 3.2 управления автоматизацией в данный момент управляет процессом. Для этого управления резервированием из уровня техники уже известны различные методы, которые, ввиду их известности, здесь упоминаются лишь кратко, но не объясняются детально и могут применяться альтернативно и/или совместно:
- Подразделение на главную и вторичную систему: когда первое средство 3.1 управления автоматизацией доступно и готово к эксплуатации, оно берет на себя управление процессом; только при его отказе или недоступности второе средство 3.2 управления автоматизацией берет на себя управление процессом.
- Непрерывный взаимный контроль обоих средств 3.1, 3.2 управления автоматизацией: оба средства 3.1, 3.2 управления автоматизацией непрерывно контролируются взаимно в текущем режиме работы, чтобы также иметь возможность распознать отказ не управляющего в данный момент средства 3.1, 3.2 управления автоматизацией.
- Текущий контроль и принятие решения, какое средство 3.1, 3.2 управления автоматизацией выполняет процесс, осуществляется на уровне прикладной программы средств 3.1, 3.2 управления автоматизацией и в том случае, когда функциональность контроля и принятия решения не зависит от соответствующего приложения,
- Текущий контроль и принятие решения, какое средство 3.1, 3.2 управления автоматизацией управляет процессом, осуществляется на уровне операционной системы средств 3.1, 3.2 управления автоматизацией, через процесс операционной системы.
- Постоянная синхронизация обоих средств 3.1, 3.2 управления автоматизацией: приложения управления на обоих средствах 3.1, 3.2 управления автоматизацией отображают всегда текущее рабочее состояние системы 1 автоматизации.
- Синхронизация при переключении: соответствующее принимающее на себя управление средство 3.1, 3.2 управления автоматизацией распознает в момент времени принятия управления не полностью текущее рабочее состояние системы 1 автоматизации и определяет его после переключения, то есть после того, как оно приняло управление системой 1 автоматизации.
- Информация модулей 5.1, 5.2, 5.3 подключения к шине о текущем управляющем процессом средстве 3.1, 3.2 управления автоматизацией: модулям 5.1, 5.2, 5.3 подключения к шине циклически с заданными интервалами времени и/или при смене управляющего средства 3.1, 3.2 управления автоматизацией по системе шины сообщается, какое из обоих средств 3.1, 3.2 управления автоматизацией в текущий момент управляет системой 1 автоматизации; так как оба контроллера 7.1, 7.2 шины отдельно получают эту информацию, при этом еще необходимо выравнивание между ними.
- Те контроллеры 7.1,7.2 шины, которые в данный момент не соединены с периферийным блоком, поставляют свои полезные данные с сопроводителем полезных данных. При этом данные могут выдаваться с действительным или недействительным сопроводителем полезных данных. Последовавший прием доступа к периферийному блоку посредством контроллера 7.1, 7.2 шины сигнализируется управляющему средству 3.1, 3.2 управления автоматизацией посредством сигнала тревоги или циклических данных в заголовке сообщения данных; только после этого управляющее средство 3.1, 3.2 управления автоматизацией получает доступ к полезным данным соответствующего периферийного блока.
- Тот контроллер 7.1, 7.2 шины модулей 5.1, 5.2, 5.3 подключения к шине, который в данный момент не получает доступ к соответствующему периферийному блоку, выдает полезные данные соответственно другого контролера 7.1, 7.2 шины этого модуля 5.1, 5.2, 5.3 подключения к шине; для этого эти полезные данные передаются через связь между обоими контроллерами 7.1, 7.2 шины.
Далее более детально описывается, как может быть реализован обмен данными через систему 4 шины, которая выполнена, например, как промышленная шина (Profibus), посредством сетевого протокола, например, протокола Profinet.
Для каждого средства 3.1, 3.2 управления автоматизацией устанавливается домен на той же самой физической сети, например, сети Ethernet. Каждый модуль 5.1, 5.2, 5.3 подключения к шине сообщает при своем пуске в эксплуатацию средствам 3.1, 3.2 управления автоматизацией соответствующий сетевой адрес для каждого из своих контроллеров 7.1, 7.2 шины. Каждому из этих сетевых адресов назначено собственное имя прибора, в случае вышеупомянутого управления дверями для рельсового транспортного средства, например, Дверь1_Р, Дверь2_Р и т.д. для соответствующего первого контроллера 7.1 шины и Дверь1_S, Дверь2_S и т.д. для соответствующего второго контроллера 7.2 шины. Оба средства 3.1, 3.2 управления автоматизацией проектируются с отдельными проектами, причем каждое средство 3.1, 3.2 управления автоматизацией индивидуально программируется, если программное обеспечение проектирования для системы шины 4 не поддерживает использование двух средств 3.1, 3.2 управления автоматизацией и двух контроллеров 7.1, 7.2 шины в каждом модуле 5.1, 5.2, 5.3 подключения к шине. Все участники шины, например, например, Дверь1_Р, Дверь2_Р и т.д. затем ассоциируются с первым средством 3.1 управления автоматизацией, все участники шины, например Дверь1_S, Дверь2_S и т.д. ассоциируются с вторым средством 3.1 управления автоматизацией.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА | 2017 |
|
RU2648942C1 |
| Адаптивное автоматическое включение резерва | 2022 |
|
RU2796515C1 |
| СПОСОБ РЕЗЕРВИРОВАНИЯ ЭЛЕКТРОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2647412C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ КОМПЬЮТЕРНЫХ АТАК С АДАПТИВНЫМ ИЗМЕНЕНИЕМ КОМПЛЕКСНЫХ ПРАВИЛ | 2021 |
|
RU2782711C1 |
| ПАРАЛЛЕЛЬНЫЙ КИНЕМАТИЧЕСКИЙ МЕХАНИЗМ | 2005 |
|
RU2395380C2 |
| Информационная система автоматизированной подготовки статистической отчетности | 2016 |
|
RU2639943C2 |
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU722828A1 |
| Система управления "умным поселком" | 2023 |
|
RU2809474C1 |
| СИСТЕМА ШИН И СПОСОБ ЭКСПЛУАТАЦИИ ТАКОЙ СИСТЕМЫ ШИН | 2014 |
|
RU2656684C2 |
| Система питания потребителей постоянного тока | 1983 |
|
SU1167683A1 |
Изобретение относится к системе автоматизации со средством управления автоматизации, периферийным блоком и системой шины, а также к способу управления подобной системой автоматизации. Техническим результатом является повышение надежности функционирования системы автоматизации. Система (1) автоматизации содержит первое средство (3.1) управления автоматизацией и резервное второе средство (3.2) управления автоматизацией. Кроме того, система (1) автоматизации содержит периферийный блок и систему шины (4), которая соединяет оба средства (3.1, 3.2) управления автоматизацией и периферийный блок. Периферийный блок подключен к системе шины (4) посредством соответствующего модуля (5.1, 5.2, 5.3) подключения к шине. Модуль (5.1, 5.2, 5.3) подключения к шине содержит первый контроллер (7.1) шины, который ассоциирован с первым средством (3.1) управления автоматизацией, второй контроллер (7.2) шины, который ассоциирован со вторым средством (3.2) управления автоматизацией, и блок (9) переключения для переключения между обоими контроллерами (7.1, 7.2) шины. 2 н. и 8 з.п. ф-лы, 2 ил.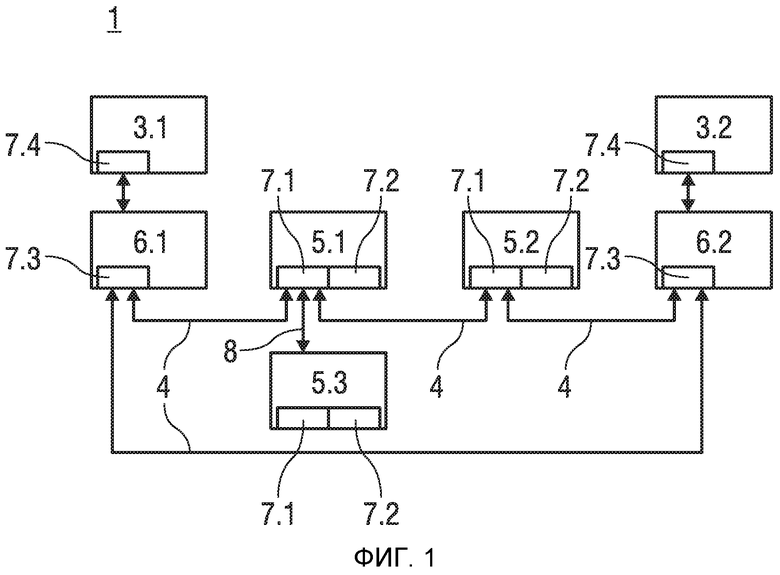
1. Система (1) автоматизации, содержащая первое средство (3.1) управления автоматизацией и резервное второе средство (3.2) управления автоматизацией, а также по меньшей мере один периферийный блок и систему шины (4), которая соединяет оба средства (3.1, 3.2) управления автоматизацией и по меньшей мере один периферийный блок, причем по меньшей мере один периферийный блок подключен к системе шины (4) посредством соответствующего модуля (5.1, 5.2, 5.3) подключения к шине, и модуль (5.1, 5.2, 5.3) подключения к шине содержит первый контроллер (7.1) шины, который ассоциирован с первым средством (3.1) управления автоматизацией и через систему шины (4) соединен с ним, второй контроллер (7.2) шины, который ассоциирован с вторым средством (3.2) управления автоматизацией и через систему шины (4) соединен с ним, и блок (9) переключения для переключения между обоими контролерами (7.1, 7.2) шины.
2. Система (1) автоматизации по п.1, отличающаяся тем, что система шины (4) является системой промышленной шины.
3. Система (1) автоматизации по п.1, отличающаяся тем, что первый контроллер (7.1) шины модуля (5.1, 5.2, 5.3) подключения к шине непосредственно подключен к системе шины (4), а второй контроллер (7.2) шины соединен с первым контроллером (7.1) шины и через это соединение косвенным образом подключен к системе шины (4).
4. Способ управления системой (1) автоматизации по любому из предыдущих пунктов, причем в зависимости от ситуации выбирается одно из обоих средств (3.1, 3.2) управления автоматизацией для управления системой (1) автоматизации, и в модуле (5.1, 5.2, 5.3) подключения к шине по меньшей мере одного периферийного блока для доступа к периферийному блоку выбирается тот контроллер (7.1, 7.2) шины, который ассоциирован со средством (3.1, 3.2) управления автоматизацией, выбранным для управления системой (1) автоматизации.
5. Способ по п.4, отличающийся тем, что система (1) автоматизации управляется посредством первого средства (3.1) управления автоматизацией, если оно доступно для управления и готово для эксплуатации, и посредством второго средства (3.2) управления автоматизацией, если первое средство (3.1) управления автоматизацией не готово для эксплуатации или недоступно.
6. Способ по п.4 или 5, отличающийся тем, что доступность и готовность к эксплуатации каждого из средств (3.1, 3.2) управления автоматизацией непрерывно контролируется.
7. Способ по п.6, отличающийся тем, что оба средства (3.1, 3.2) управления автоматизацией взаимно контролируются на доступность и готовность к эксплуатации.
8. Способ по .4, отличающийся тем, что контроллерам (7.1, 7.2) шины модуля (5.1, 5.2, 5.3) подключения к шине по меньшей мере одного периферийного блока через систему шины (4) сообщается о каждой смене средства (3.1, 3.2) управления автоматизацией, выбранного для управления системой (1) автоматизации.
9. Способ по п.4, отличающийся тем, что контроллерам (7.1, 7.2) шины модуля (5.1, 5.2, 5.3) подключения к шине по меньшей мере одного периферийного блока циклически, с заданными временными интервалами по системе шины (4) сообщается, какое из средств (3.1, 3.2) управления автоматизацией в текущий момент выбрано для управления системой (1) автоматизации.
10. Способ по п.4, отличающийся тем, что при смене контроллера (7.1, 7.2) шины, получающего доступ к по меньшей мере одному периферийному блоку, принимающему доступ контроллеру (7.1, 7.2) шины от передающего доступ контроллера (7.1, 7.2) шины сообщается текущее системное состояние по меньшей мере одного периферийного блока.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |

