Область техники
Изобретение имеет отношение к станкам и, в частности, к роботам, предназначенным для работы в промышленности.
Уровень техники
В описании изобретения к патенту США 4732525 (соответствующему SE 452279) раскрыт параллельный кинематический механизм в виде робота традиционной конструкции. Робот включает три установочных приспособления, которые могут удлиняться и укорачиваться, в сочетании с центральной трубой, на одном конце которой находится установочная головка. К тому же, центральная труба расположена с возможностью перемещения в направлении своей оси посредством центральной опоры в виде универсального соединения, которое обеспечивает три степени свободы относительно основания механизма. Каждое установочное приспособление соединено с установочной головкой посредством соединения, которое обеспечивает три степени свободы, а также с основанием механизма посредством соединения, которое имеет две степени свободы, чтобы обеспечить возможность перемещения установочной головки в пределах ограниченной рабочей зоны. Установочные приспособления воспринимают усилия растяжения и сжатия, тогда как центральная труба воспринимает все вращательные усилия и напряжения изгиба от нагрузок на установочную головку.
Точность перемещений такого механизма существенно зависит от его жесткости, которая, в свою очередь, зависит от количества имеющихся опор/степеней свободы, а также от способности материалов ее деталей минимизировать напряжения кручения и напряжения изгиба в критических направлениях. Например, следует заметить, что большие поперечные силы по отношению к установочной головке вызывают тенденцию к изгибу и/или повороту центральной трубы между опорой гироскопа в основании механизма и ее соединением с установочными приспособлениями.
Таким образом, жесткость описанного традиционного механизма зависит, помимо прочего, от конструкции соединения установочных приспособлений с установочной головкой, а также от собственной жесткости самой центральной трубы. Чтобы повысить жесткость такого традиционного механизма, необходимо, во-первых, применить более жесткие допуски в каждом соединении и, во-вторых, использовать центральную трубу усиленной конструкции, тем самым увеличивая массу.
Существует возможность дополнительного усиления центральной трубы с использованием более прочного материала и/или с помощью увеличения толщины трубы и/или ее диаметра.
Однако все подобные повышения жесткости механизма приводят к увеличению стоимости, массы механизма и уменьшению рабочей зоны, в которой может перемещаться установочная головка.
Аналогичные параллельные кинематические механизмы известны также, например, из заявки на патент Великобритании 8319708 (2143498), из патентов США 4569627 и Норвегии (NO) 148216.
Однако ни один из этих известных механизмов не обладает основной конструкцией, которая обеспечивает уровень жесткости, а значит и уровень точности, к которому стремятся современные механизмы.
Цель изобретения
Одной целью настоящего изобретения является предоставление параллельного кинематического механизма, чья жесткость и вместе с тем желаемая точность в сочетании с простой конструкцией, которая способствует относительному снижению издержек производства, превышали бы аналогичные параметры ранее известных параллельных кинематических механизмов.
Другой целью является предоставление такого механизма, в котором отсутствует центральная труба для увеличения подвижности позиционирующей головки в ее рабочей зоне, что также способствует обеспечению простоты конструкции и сравнительному снижению издержек производства.
Еще одной целью является уменьшение перемещающейся массы такого механизма.
Раскрытие изобретения
Эти цели достигаются посредством настоящего изобретения, как определено в прилагаемом независимом пункте формулы изобретения. Другие соответствующие предпочтительные примеры осуществления настоящего изобретения будут раскрыты в последующих зависимых пунктах формулы изобретения.
Изобретение относится к параллельному кинематическому механизму, включающему, по меньшей мере, три установочных приспособления, имеющих возможность по отдельности удлиняться и укорачиваться. Каждое установочное приспособление соединено установочной головкой посредством первого соединения и также с основанием механизма посредством соответствующего универсального соединения, которое может иметь форму гироскопа или шаровой винтовой пары. Таким образом установочная головка может перемещаться в пределах рабочей зоны при маневрировании установочных приспособлений. По меньшей мере, две усиливающие балки соединены с установочной головкой посредством соответствующей поворотной опоры балки, каждая из которых имеет только одну степень свободы. Каждая усиливающая балка расположена с возможностью скольжения в поперечном направлении в опоре балки в основании при удлинении или укорачивании одного или более установочных приспособлений. При этом каждая опора балки соединена с основанием механизма посредством универсального соединения опоры, и опора, по меньшей мере, одной усиливающей балки расположена с возможностью поворота вокруг оси, простирающейся параллельно продольной оси вышеупомянутой усиливающей балки.
Эта концепция порождает ряд реализуемых основных примеров осуществления взаимосвязи между основанием механизма, установочными приспособлениями, усиливающими балками и установочной головкой в отношении взаимосвязи этих компонентов, с одной стороны, и опорами компонентов в основании механизма и в установочной головке, с другой стороны, что станет очевидным из следующей части описания со ссылкой на фиг.6.
Пример осуществления, подробно описанный ниже, включает три установочных приспособления, каждое из которых соединено с соответствующей усиливающей балкой, при этом во втором установочном приспособлении предусмотрена дополнительная усиливающая балка.
Универсальное соединение включает внешний гироскопический элемент, который смонтирован в указанном основании с возможностью поворота вокруг внешней оси гироскопа, и также включает внутренний гироскопический элемент, смонтированный в указанном внешнем гироскопическом элементе с возможностью поворота вокруг внутренней оси гироскопа под прямым углом к внешней оси гироскопа. В этом случае опора балки предпочтительно соединена с внутренним гироскопическим элементом универсального соединения. В случаях других примеров осуществления опора балки может быть отделена от универсального соединения установочного приспособления, но соединена со своим универсальным соединением на некотором расстоянии от универсального соединения установочного приспособления, которое, тем не менее, нуждается в собственной поворотной опоре балки для соединения усиливающей балки с установочной головкой.
Из показанного примера осуществления очевидно, что первое соединение имеет только одну степень свободы, придавая тем самым механизму жесткость при устранении необходимости наличия центральной трубы.
Каждая усиливающая балка выполнена с возможностью создания в первом направлении сопротивления изгибу, существенно превышающего свое сопротивление изгибу под прямыми углами к первому направлению. Это позволяет усиливающей балке иметь в основном поперечное сечение прямоугольной или эллиптической формы. Тем не менее, следует понять, что в объеме изобретения возможны и другие поперечные сечения, например двутавровое. Усиливающая балка, предпочтительно, изготавливается из композиционного материала с углеродными волокнами.
Механизм согласно подробно показанному примеру осуществления включает три установочных приспособления, каждое из которых неразъемно соединено с усиливающей балкой в указанном первом соединении. В одном из установочных приспособлений предусмотрена дополнительная усиливающая балка для достижения в основном одинаковой жесткости во всех направлениях. Как указано выше, в механизме в принципе может быть предусмотрено только две усиливающих балки, расположенных под прямым углом друг к другу. Опора, по меньшей мере, одной усиливающей балки выполнена с возможностью поворота относительно своей продольной оси или оси своей опоры основания, параллельной указанной своей продольной оси. В этом проиллюстрированном примере осуществления парные усиливающие балки расположены с возможностью поворота вокруг установочного приспособления во внутреннем гироскопическом элементе.
Каждое установочное приспособление проиллюстрированного примера осуществления состоит из механизма винт-гайка, где винт неразъемно соединен с внутренним гироскопическим элементом. Тем не менее, следует понять, что другие конструкции механизмов, где используются установочные приспособления других типов, полностью находятся в объеме изобретения. Например, вместо показанного механизма винт-гайка в качестве установочных устройств могут использоваться линейные двигатели. Такой линейный двигатель может даже состоять из усиливающей балки или содержать ее часть.
Каждая усиливающая балка включает, по меньшей мере, один простирающийся в продольном направлении первый элемент скольжения, например стальную планку скольжения, которая может быть приклеена и крепко привинчена к балке, указанный первый элемент скольжения соединен по профилю, но с возможностью скольжения, со вторым элементом скольжения, например направляющей, который соединен с гайкой, непосредственно или косвенно, через промежуточную опору. В случае, когда второй элемент скольжения соединен с гайкой непрямо, через промежуточную опору, второй элемент скольжения направляется относительно гайки по профилю благодаря способности наклоняться относительно установочного приспособления, как становится очевидно из показанного примера осуществления универсальной опоры с парными усиливающими балками. Хотя показанный пример осуществления демонстрирует, что усиливающие балки могут поворачиваться вокруг оси, которая простирается параллельно продольной оси симметрии усиливающей балки, путем разрешения вращения во внутреннем гироскопическом элементе, следует понимать, что соответствующее вращение может достигаться посредством установки всего универсального соединения для вращения в основании механизма, то есть внешнего гироскопического элемента вышеупомянутого соединения.
Винт или гайка приводятся во вращение с помощью двигателя установочного приспособления. Если приводится во вращение винт, то двигатель соединен с одним концом винта, тогда как другой конец указанного винта поддерживается опорным подшипником. В случае подробно показанного примера осуществления двигатель установочного приспособления крепится в держателе, один конец которого снабжен одной частью указанного первого соединения, и который также включает присоединительные поверхности, предназначенные для крепления одной или более усиливающих балок. Двигатель установочного приспособления устанавливается в держателе двигателя, один из концов которого оснащается одной частью вышеупомянутого первого соединения и который также включает в себя присоединительные поверхности, к которым предполагается крепить одну или несколько усиливающих балок. Держатель двигателя, который удерживает двигатель установочного приспособления, может в качестве альтернативы устанавливаться на другом конце винта относительно показанного, при этом "свободный от двигателя" конец винта соединяется с первым соединением. Когда двигателем приводится во вращение гайка, то двигатель может подсоединяться, например, через ременный привод и т.п., так что передаточное отношение от установочного приспособления к двигателю может быть легко изменено.
Два из первых соединения установочной головки включают в себя взаимно параллельные оси соединений, где третий из указанных первых соединений на указанной установочной головке включает ось соединения, которая простирается под прямым углом к двум другим. Кроме того, внутренняя ось гироскопа универсального соединения каждого установочного приспособления параллельна оси первого соединения установочного приспособления относительно тех соединений, которые не допускают наклона, то есть поворота усиливающей балки вокруг оси, параллельной ее собственной продольной оси симметрии в соединении.
Показанный в подробностях пример осуществления предоставляет параллельный кинематический механизм, у которого универсальные соединения включают два соединения, имеющих по две степени свободы, и одно соединение, имеющее три степени свободы, и только одну степень свободы в отношении каждой из поворотных опор балки механизма, то есть на установочной головке.
Следует понять, что количество предусмотренных усиливающих балок и размеры их поперечных сечений могут изменяться в соответствии с изобретением. Следует также понять, что количество степеней свободы первого соединения, то есть соединения установочного приспособления, в отношении установочной головки может изменяться при условии, что поворотная опора балки не совмещена с первым соединением.
Краткое описание чертежей
Далее изобретение будет описано более подробно с использованием примеров его осуществления, проиллюстрированных на прилагаемых чертежах,
где на фиг.1 изображен пример осуществления механизма в соответствии с настоящим изобретением;
на фиг.2 изображена одна из усиливающих балок механизма в соответствии с фиг.1, с присоединенным установочным приспособлением;
на фиг.3 изображен разрез в точке F3 фиг.2 усиливающей балки и установочного приспособления;
на фиг.4 изображена другая усиливающая балка механизма, которая способна поворачиваться в соответствии с фиг.1, и также соединена с установочными приспособлениями;
на фиг.5 изображен разрез усиливающей балки и установочного приспособления в точке F5 фиг.4;
на фиг.6а-е схематически показаны пять различных основных типов примеров осуществления в соответствии с настоящим изобретением;
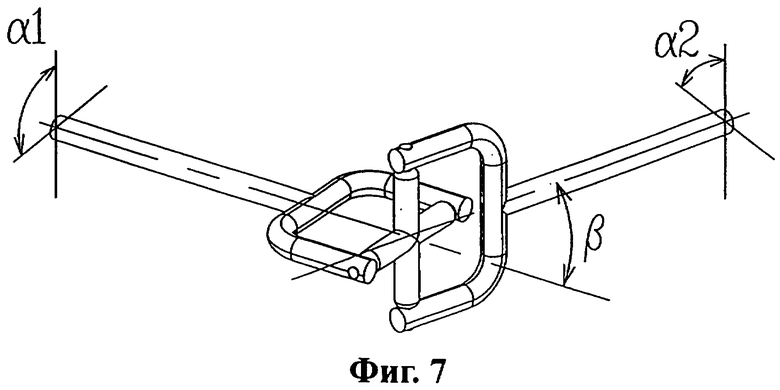
на фиг.7 изображено универсальное соединение в виде карданного шарнира, имеющего две степени свободы.
Описание изобретения
На фиг.1 изображен пример осуществления параллельного кинематического механизма 1 согласно настоящему изобретению. Механизм включает основание 2, в трех соответствующих сквозных отверстиях которого установлены три отдельных универсальных соединения 3.1, 3.2, 3.3. Сквозь каждое универсальное соединение протягивается установочное приспособление 4.1, 4.2, 4,3 и усиливающая балка или брус 5.1, 5.2.1, 5.2.2, 5.3. Когда универсальное соединение, относящееся к установочному приспособлению, не совпадает с универсальным соединением, относящимся к усиливающей балке, универсальное соединение усиливающей балки для универсального соединения балки обозначается BU1, BU2, BU3.
Установочное приспособление выполнено в виде механизма винт-гайка, где гайка жестко соединена с универсальным соединением. Винт установочного приспособления приводится в движение установочным двигателем 6.1, 6.2, 6.3, установленным в держателе 7.1, 7.2, 7.3 двигателя, на конце указанного держателя, в свою очередь, находится одна часть 8 первого соединения, которая взаимодействует со второй частью 9 указанного соединения вокруг оси 10 соединения. Вторая часть 9 соединения жестко соединена с установочной головкой 11. Таким образом, первое соединение 8, 9, 10 примера осуществления фиг.1 функционирует в качестве поворотной опоры 100.3 балки для усиливающей балки 5.3 и в данном случае выступает в качестве шарнира, который имеет только одну степень свободы. Другие держатели 7.1, 7.2 двигателей соединены соответственно с установочной головкой посредством отдельной поворотной опоры 100.1, 100.2 балки. Также установочная головка 11 обычно соединена с маневрирующей головкой 12, инструментальной головкой 13 и средством крепления инструмента 14 для перемещения инструмента в пределах рабочей зоны. На двух противоположных сторонах держателя 7.1, 7.2, 7.3 двигателя имеются также присоединительные поверхности 15, относительно которых крепятся усиливающие балки 5.1, 5.2.1, 5.2.2, 5.3. Как можно видеть на фиг.1, в основании имеется срединное отверстие 16 для размещения кабелей и т.п.
Каждая из усиливающих балок 5.1, 5.2, 5.3 размещена в опоре 17.1, 17.2.1, 17.2.2, 17.3 балки в основании 2 с возможностью поперечного перемещения со скольжением при удлинении или укорачивании установочного приспособления 4.1, 4.2, 4.3. Опора 17.1, 17.2.1, 17.2.2, 17.3 балки согласно примеру осуществления фиг.1 размещена в универсальном соединении BU1, BU2, BU3 балки, которое совпадает с универсальными соединениями 3.1, 3.2, 3.3 соответствующих установочных приспособлений.
Как можно видеть на фиг.1, одно из установочных приспособлений, второе установочное приспособление 4.2, включает две усиливающие балки 5.2.1, 5.2.2, которые расположены на соответствующей стороне установочного приспособления, соединенного с вышеупомянутыми балками, и обычно направлены под прямым углом к двум остальным усиливающим балкам 5.1, 5.3 на двух других установочных приспособлениях 4.1, 4.3. В результате такого удвоения количества усиливающих балок все усиливающие балки в механизме могут иметь одинаковые размеры и будут воспринимать одинаково большие усилия.
На фиг.2 изображено первое установочное приспособление 4.1 в комбинации с усиливающей балкой 5.1, идентичное третьему установочному приспособлению 4.3 фиг.1. Универсальное соединение 3.1 включает внешний гироскопический элемент 21, который размещен в основании с возможностью вращения вокруг внешней оси 22 гироскопа, и, кроме того, включает внутренний гироскопический элемент 23, который размещен во внешнем гироскопическом элементе 21 с возможностью вращения вокруг внутренней оси 24 гироскопа. Усиливающая балка 5.1 также проходит через окно 25 гироскопа в универсальном соединении, при этом установочное приспособление 4.1 и усиливающая балка 5.1 могут перемещаться в универсальном соединении одинаково, как узел. В связи с этим усиливающая балка 5.1 включает два первых простирающихся в продольном направлении элемента 26 скольжения в виде двух планок скольжения, которые фиксируются по профилю, но каждая из которых соединена с возможностью скольжения с соответствующим вторым элементом 27 скольжения в виде направляющей, жестко соединенной с внутренним гироскопическим элементом 23. Гайка 28 установочного приспособления 4.1 жестко смонтирована во внутреннем гироскопическом элементе 23, поскольку винт вышеупомянутого приспособления вращается в гайке и поддерживается на одном конце опорным подшипником 29.
По мере того как винт установочного приспособления 4.1 вращается установочным двигателем 6.1, держатель 7.1 двигателя вместе со своей частью 8 соединения будет приближаться к универсальному соединению 3.1, а также к основанию, или отдаляться от них вместе с усиливающей балкой 5.1, установленной с возможностью перемещения по элементу 27 скольжения, при этом установочная головка сможет перемещаться в пределах рабочей зоны. В этом случае винты соответствующих установочных приспособлений будут функционировать как толкающе-тянущие средства перемещения между установочной головкой и основанием, тогда как усиливающие балки, соединенные с установочными приспособлениями, действуют как средства, воспринимающие напряжения изгиба и кручения, и для передачи усилий в поперечном направлении между установочной головкой и основанием.
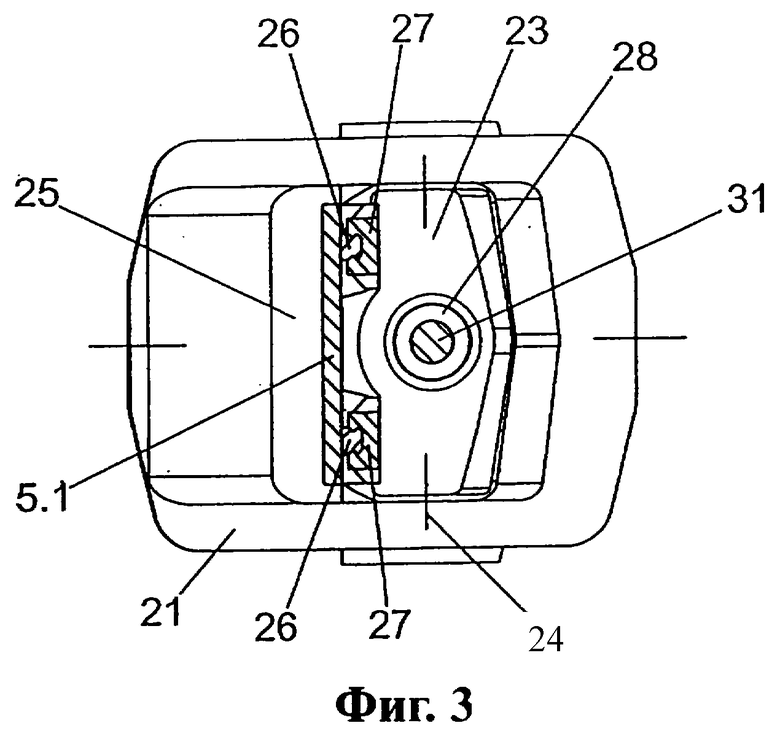
На фиг.3 представлен вид в разрезе, взятый в позиции F3 фиг.2. На фиг.3 показан винт 31 установочного приспособления, ввинченный в свою гайку 28, которая жестко смонтирована во внутреннем гироскопическом элементе 23, который, в свою очередь, смонтирован во внешнем гироскопическом элементе 21 с возможностью вращения вокруг внутренней оси 24 гироскопа. На чертеже более четко показано, как размещен с возможностью скольжения первый элемент 26 скольжения усиливающей балки 5.1, согласующийся по форме с двумя другими элементами 27 скольжения, неразъемно прикрепленными на внутреннем гироскопическом элементе 23. Кроме того, на чертеже наглядно показано окно 25 гироскопа. На чертеже также четко видно, что усиливающая балка 5.1 имеет поперечное сечение прямоугольной формы, а значит, балка будет иметь в первом направлении жесткость при изгибе, которая существенно превышает жесткость балки при изгибе в направлении под прямым углом к упомянутому первому направлению.
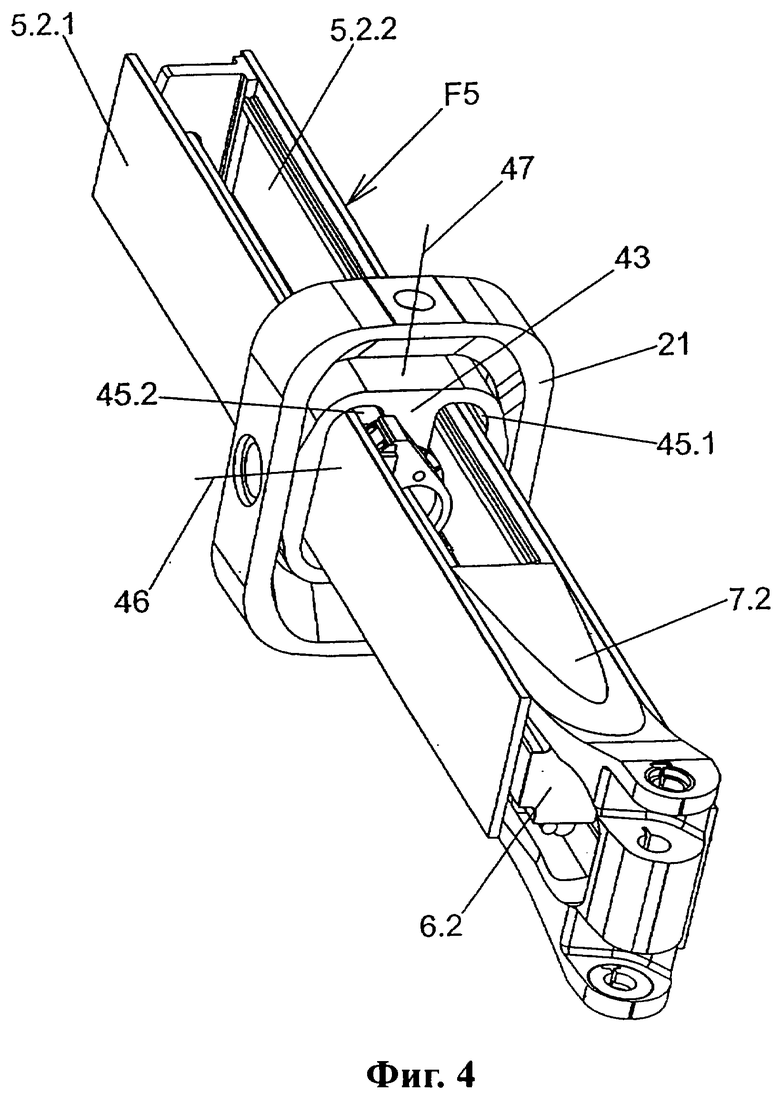
На фиг.4 изображено другое и, вместе с тем, последнее установочное приспособление из вышеупомянутых трех установочных приспособлений, а также показаны две усиливающие балки 5.2.1, 5.2.2, соединенные с указанным установочным приспособлением, где указанные балки прочно соединены с держателем 7.2 двигателя на соответствующей стороне установочного двигателя 6.2 и с установочным приспособлением, которое закрыто на чертеже одной усиливающей балкой 5.2.1. Это установочное приспособление проходит через внутренний гироскопический элемент 43, который подобно ранее описанному элементу установлен с возможностью вращения вокруг внутренней оси 46 гироскопа во внешнем гироскопическом элементе 21, который, в свою очередь, установлен с возможностью вращения вокруг внешней оси 47 гироскопа в вышеуказанном основании. Однако внутренний гироскопический элемент 43 включает первое и второе окна 45.1, 45.2 гироскопа, в которые протянуты параллельно друг другу две усиливающие балки 5.2.1, 5.2.2.
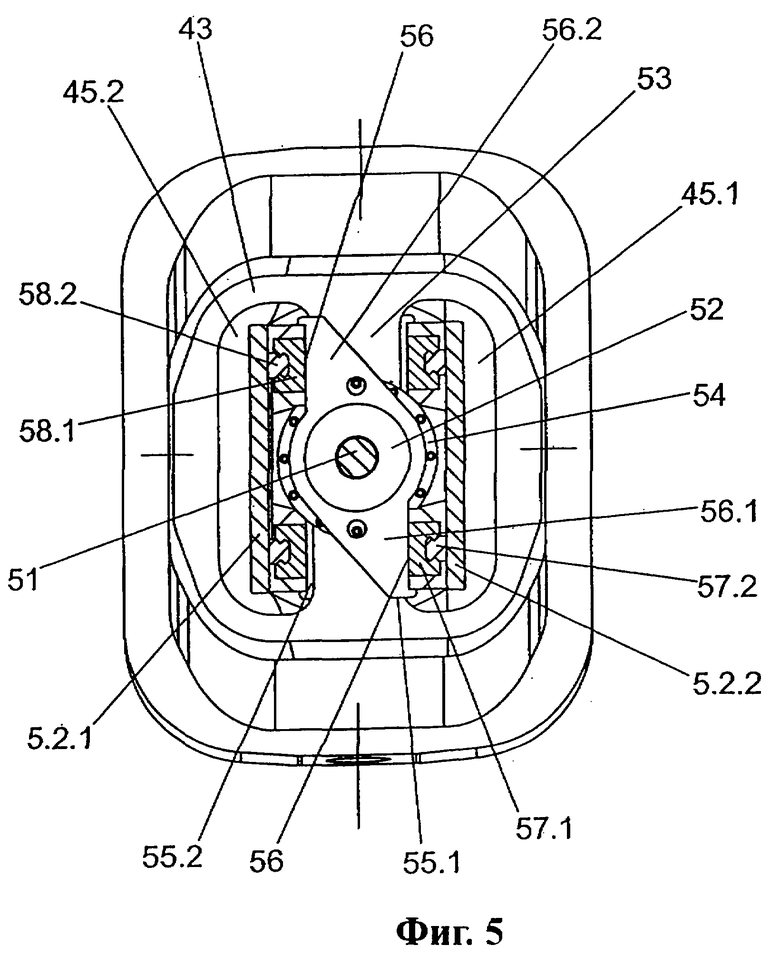
На фиг.5 представлен разрез фиг.4 в позиции F5. На фиг.5 винт 51 установочного приспособления находится в резьбовом зацеплении со своей гайкой 52, которая жестко соединена с центральной суженной частью 53 через корпус 54 передачи шариковой пары винт-гайка во внутреннем гироскопическом элементе 43, при этом вышеупомянутая суженая часть образована указанными двумя окнами 45.1, 45.2 гироскопа с каждой соответствующей стороны суженой части. На чертеже также видно, что каждая усиливающая балка 5.2.1, 5.2.2 соединена с внутренним гироскопическим элементом 43 посредством двух поворотных элементов 55.1, 55.2, один из которых, поворотный элемент 55.1, смонтирован на одной стороне внутреннего гироскопического элемента 43 с возможностью поворота вокруг винта 51 установочного приспособления, тогда как другой поворотный элемент 55.2 установлен соответственно на другой стороне внутреннего гироскопического элемента 43 с возможностью поворота вокруг винта 51 указанного установочного приспособления. Каждый из поворотных элементов 55.1, 55.2 установлен в корпусе 54 передачи шариковой пары винт-гайка с возможностью поворота вокруг винта 51 установочного приспособления. Один поворотный элемент включает первый опорный рычаг 56.1 и второй опорный рычаг 56.2, расположенные по диагонали вокруг винта 51 установочного приспособления, при этом их опорные поверхности ориентированы в противоположных направлениях таким образом, что первый опорный рычаг 56.1 удерживает второй элемент 57.1 скольжения и первый элемент 57.2 скольжения, соединенный с одной усиливающей балкой 5.2.1, тогда как второй опорный рычаг 56.2 удерживает второй элемент 58.1 скольжения и первый элемент 58.2 скольжения, соединенный со второй усиливающей балкой 5.2.2. В соответствии с фиг.5 второй поворотный элемент 55.2 на другой стороне суженной части 53 соответственно выполнен и ориентирован таким образом, что каждая усиливающая балка 5.2.1, 5.2.2 будет соединена с обоими поворотными элементами 55.1, 55.2 на соответствующих сторонах суженной части 53. Таким образом, две усиливающие балки 5.2.1, 5.2.2 соединены с внутренним гироскопическим элементом 43 посредством вышеуказанных поворотных элементов.
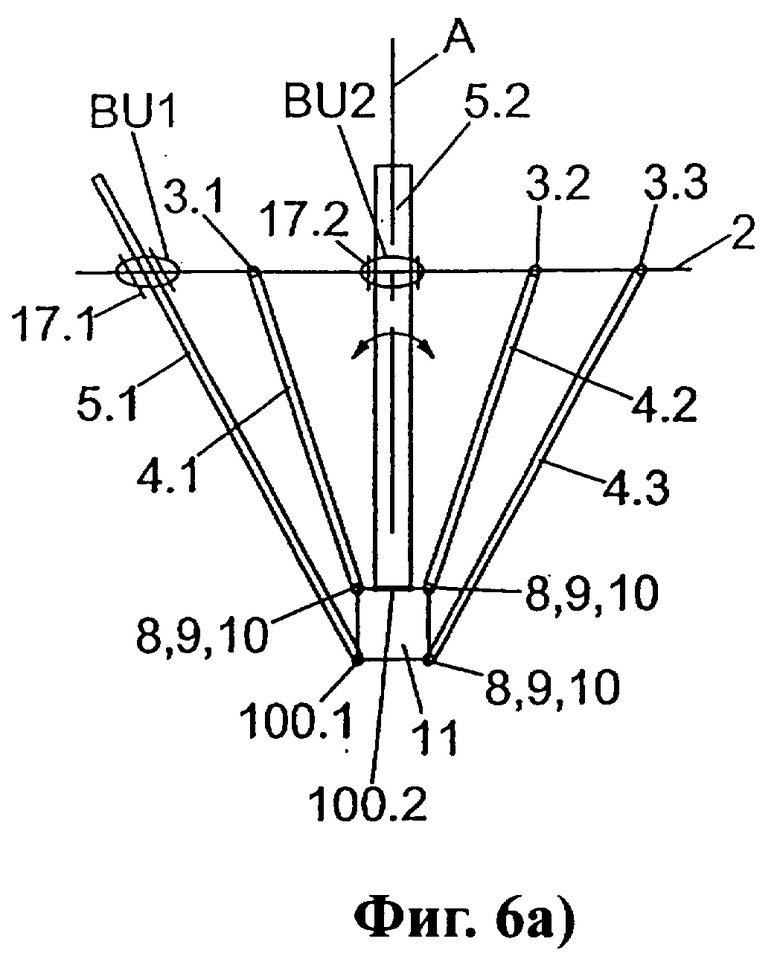
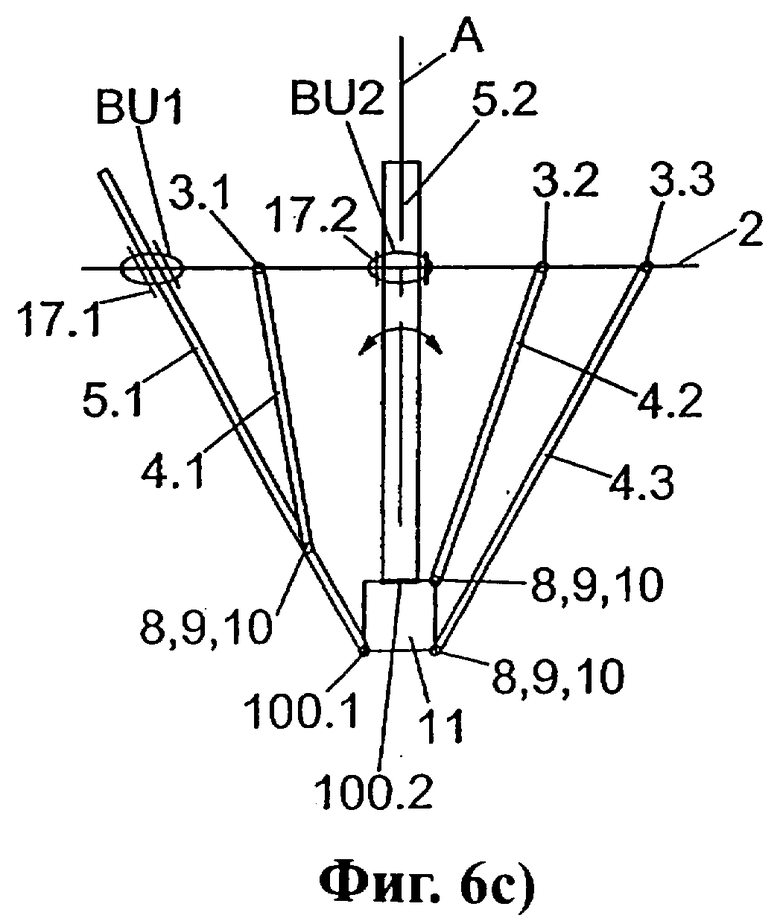
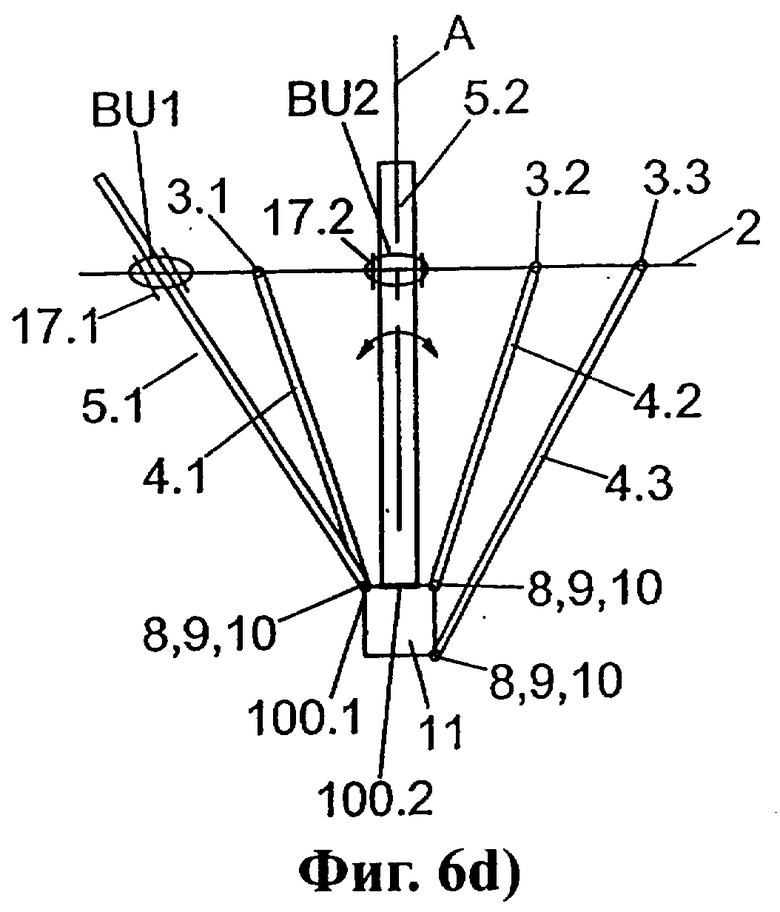
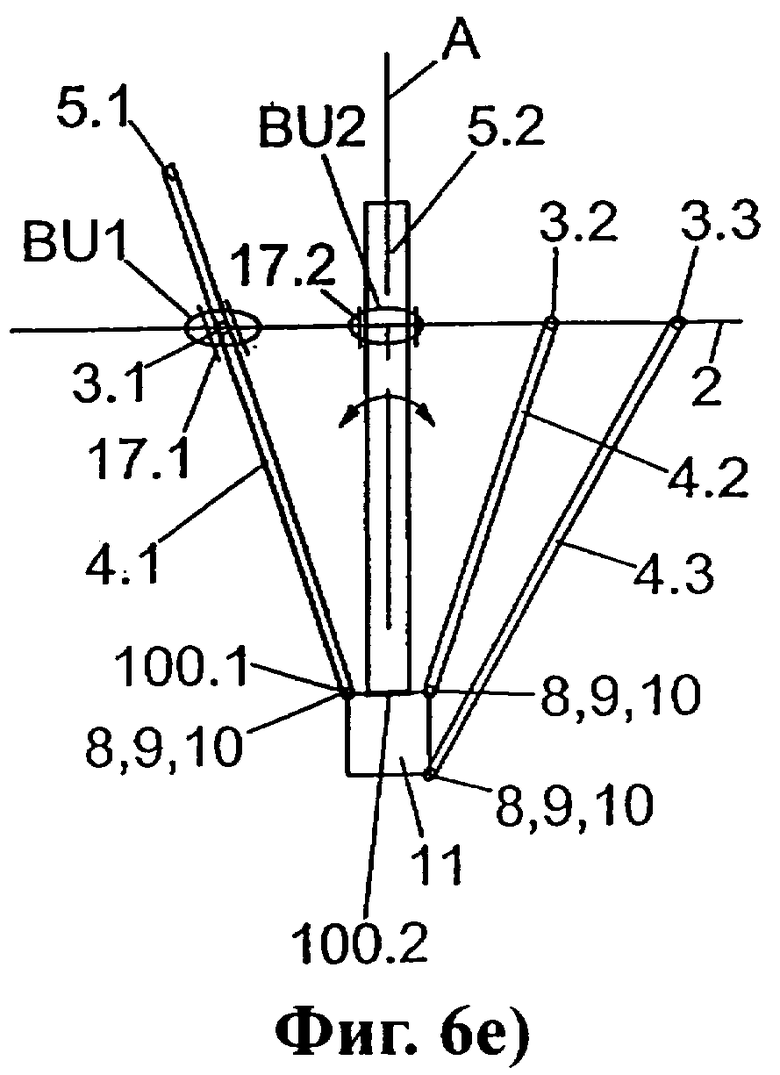
На фиг.6а-е схематически представлены пять различных основных типов примеров осуществления, которые находятся в пределах объема настоящего изобретения. Используя на фиг.6 нумерацию, соответствующую использованной на ранее описанных чертежах, на фиг.6а-е схематически показаны основные типы примеров осуществления в пределах объема настоящего изобретения, где механизм включает, по меньшей мере, три установочных приспособления 4.1, 4.2, 4.3, каждое из которых может удлиняться и укорачиваться в продольном направлении и где каждое установочное приспособление соединено с установочной головкой 11 посредством первого соединения 8, 9, 10. Каждое установочное приспособление 4.1, 4.2, 4.3 также соединено с основанием 2 посредством универсального соединения 3.1, 3.2, 3.3, при этом при маневрировании установочных приспособлений упомянутая установочная головка 11 перемещается в пределах рабочей зоны. По меньшей мере две усиливающие балки 5.1, 5.2 соединены с установочной головкой 11 посредством отдельной поворотной опоры 100.1, 100.2 балки, каждая из которых имеет только одну степень свободы, то есть указанная опора функционирует как шарнир. Кроме того, каждая усиливающая балка 5.1, 5.2 размещена с возможностью скольжения в поперечном направлении в опоре 17.1, 17.2 балки в основании 2 при удлинении или укорачивании одного или более установочных приспособлений 4.1, 4.2, 4.3. Как описано выше, каждая опора 17.1, 17.2 балки соединена с основанием 2 посредством универсального соединения BU1, BU2 балки. Также опора 17.2 по меньшей мере одной усиливающей балки 5.2 может вращаться вокруг оси А, параллельной продольной оси усиливающей балки 5.2, как показано на фиг.6а-е двусторонней стрелкой.
На фиг.6а изображен первый основной тип примера осуществления, в котором первое соединение 8, 9, 10 установочного приспособления, например первого установочного приспособления 4.1, представляет собой соединение, которое соединено непосредственно с установочной головкой 11 и которое расположено на некотором расстоянии от шейки поворотной опоры 100.1 или 100.2 усиливающей балки, например первой усиливающей балки 5.1, также указанная шейка непосредственно соединена с установочной головкой 11. Кроме того, универсальное соединение BU1 и опора 17.1 первой усиливающей балки 5.1 в основании 2 находятся на некотором расстоянии от универсального соединения 3.1, 3.2, 3.3 установочного приспособления 4,1, 4.2, 4.3, а указанное универсальное соединение жестко соединено с основанием 2.
На фиг.6b показан второй основной тип примера осуществления, в котором первое соединение 8, 9, 10 установочного устройства, например первого установочного устройства 4.1, представляет собой соединение, которое непосредственно связано с установочной головкой 11. В случае данного примера осуществления поворотная опора 100.1 или 100.2 усиливающей балки, например первой усиливающей балки 5.1, жестко соединена с установочным приспособлением, но отделена от первого соединения 8, 9, 10 установочного приспособления. В соответствии с примером осуществления, представленным на фиг.6а, универсальное соединение BU1 балки и опора 17.1 первой усиливающей балки 5.1 в основании 2 находятся на некотором расстоянии от универсального соединения 3.1, 3.2, 3.3 установочного приспособления 4.1, 4.2, 4,3, а указанное универсальное соединение также жестко соединено с основанием 2.
На фиг.6с показан третий основной тип примера осуществления, в котором первое соединение 8, 9, 10 установочного приспособления, например первого установочного приспособления 4.1, жестко соединено с усиливающей балкой, например первой усиливающей балкой 5.1. В этом примере осуществления поворотная опора 100.1 усиливающей балки 5.1 непосредственно соединена с установочной головкой 11. Тем не менее, первое соединение 8, 9, 10 установочного приспособления находится на некотором расстоянии от поворотной опоры 100.1 балки. В соответствии с представленными на фиг.6а и фиг.6b примерами осуществления универсальное соединение BU1 балки и опора 17.1 усиливающей балки 5.1 в основании 2 находятся на некотором расстоянии от универсального соединения 3.1, 3.2, 3.3 установочного приспособления 4.1, 4.2, 4.3, а указанное универсальное соединение жестко соединено с основанием 2.
На фиг.6d проиллюстрирован четвертый основной тип примера осуществления, в котором первое соединение 8, 9, 10 установочного приспособления, например, первого установочного приспособления 4.1, и поворотная опора 100.1, 100.2 усиливающей балки, например первой усиливающей балки 5.1, составляют одно и то же соединение, которое непосредственно соединено с установочной головкой 11. Подобно примерам осуществления, показанным на фиг.6а-с, универсальное соединение BU1 и опора 17.1 первой усиливающей балки 5.1 в основании 2 находятся на некотором расстоянии от универсального соединения 3.1, 3.2, 3.3 установочного приспособления 4.1, 4,2, 4,3, а указанное универсальное соединение жестко соединено с основанием 2.
На фиг.6е проиллюстрирован пятый основной тип примера осуществления, в котором первое соединение 8, 9, 10 установочного приспособления, например первого установочного приспособления 4.1, и поворотная опора 100.1, 100.2 усиливающей балки, например первой усиливающей балки 5.1, составляют одно и то же соединение, которое непосредственно соединено с установочной головкой 11. Универсальное соединение 3.1, 3,2, 3.3 установочного приспособления 4.1, 4.2, 4.3 жестко соединено с основанием 2 и состоит из универсального соединения вышеупомянутой усиливающей балки и опоры балки в основании 2. Таким образом, в данном примере осуществления усиливающая балка перемещается вместе с установочным приспособлением.
Этот пятый основной тип примера осуществления включает установочное приспособление в комбинации с усиливающей балкой в соответствии с примером осуществления, подробно описанным выше со ссылкой на фиг.1-5, в качестве введения, этот пример осуществления принадлежит к пятому основному типу примера осуществления.
Универсальные соединения BU1 и BU2 балки являются так называемыми карданными шарнирами, имеющими две степени свободы, где кинематическое поведение такого соединения таково, что угол поворота внешней оси 22 гироскопа отличается от угла поворота внутренней оси 24 гироскопа из-за определенного угла между ними, так называемой разности углов поворота. Когда поворотные опоры 100.1, 100.2 балки, которые имеют только одну степень свободы, устанавливаются под прямыми углами друг к другу, разности углов поворота в отношении BU1 и BU2 будут противодействовать друг другу, что приводит к кинематической блокировке механизма, если, по меньшей мере, одна усиливающая балка не имеет возможности поворачиваться, что показывает следующее уравнение в связи с фиг.7.
Разность углов поворота можно выразить следующим образом:
φК=α2-α1

где β - угол между внешней осью гироскопа и внутренней осью гироскопа, α1 - угол поворота внешней оси гироскопа, а α2 - угол поворота внутренней оси гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАЛЛЕЛЬНЫЙ КИНЕМАТИЧЕСКИЙ МЕХАНИЗМ С ДЕРЖАТЕЛЯМИ КАРДАННОГО ТИПА | 2011 |
|
RU2558324C2 |
| Устройство управления движением автономного необитаемого подводного аппарата | 2022 |
|
RU2785260C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМОЙ И ИНДИКАТОРНАЯ ГИРОСКОПИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2391630C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ, ИМЕЮЩИХ КОНИЧЕСКУЮ ЧАСТЬ | 2018 |
|
RU2698085C1 |
| Автономный генератор тепла и электричества для железнодорожного транспорта | 2021 |
|
RU2761332C1 |
| Полувагон сочлененный | 2017 |
|
RU2657712C1 |
| Способ управления индикаторной гироскопической платформой и устройство для его осуществления | 2016 |
|
RU2622235C1 |
| ОБНАРУЖИВАЮЩАЯ, РОЮЩАЯ, ПОДДЕРЖИВАЮЩАЯ, АНКЕРУЮЩАЯ И ПЕРЕДАЮЩАЯ КОМПЛЕКСНАЯ МАШИННАЯ СИСТЕМА ДЛЯ БЫСТРОГО РЫТЬЯ СКВАЖИНЫ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2020 |
|
RU2748264C1 |
| Устройство защиты радиоприема в условиях сложной электромагнитной обстановки корабля, судна | 2019 |
|
RU2723434C1 |
| СПОСОБ НИВЕЛИРОВАНИЯ, РАЗМЕТКИ И ПРОВЕРКИ КОРПУСА СУДНА | 1992 |
|
RU2094294C1 |


Изобретение относится к станкам, в частности к роботам, предназначенным для работы в промышленности. Параллельный кинематический механизм (1) включает установочные приспособления (4.1, 4.2, 4.3), имеющие возможность по отдельности удлиняться и укорачиваться, и соединенные с установочной головкой (11) посредством первого соединения (8, 9, 10), а с основанием (2) - посредством карданного шарнира (3.1, 3.2, 3.3). Установочная головка (11) расположена с возможностью перемещения в пределах рабочей зоны при маневрировании установочных приспособлений (4.1, 4.2, 4.3). Усиливающие балки (5.1, 5.2, 5.2.1, 5.2.2) соединены с установочной головкой (11) посредством соответствующей поворотной опоры (100.1, 100.2) балки, каждая из которых имеет только одну степень свободы и имеет возможность скольжения в поперечном направлении в опоре (17.1, 17.2, 17.2.1, 17.2.2) балки в основании (2) при удлинении или укорачивании одного или более установочных приспособлений (4.1, 4.2, 4.3). Каждая опора (17.1, 17.2, 17.2.1, 17.2.2) балки соединена с основанием (2) посредством карданного шарнира (BU1, BU2) опоры. Опора (17.2, 17.2.1, 17.2.2) усиливающей балки (5.2, 5.2.1, 5.2.2) расположена с возможностью поворота вокруг оси, расположенной параллельно продольной оси усиливающей балки (5.2, 5.2.1, 5.2.2). Обеспечивается повышение жесткости и точности механизма в сочетании с простотой его конструкции. 21 з.п. ф-лы, 12 ил.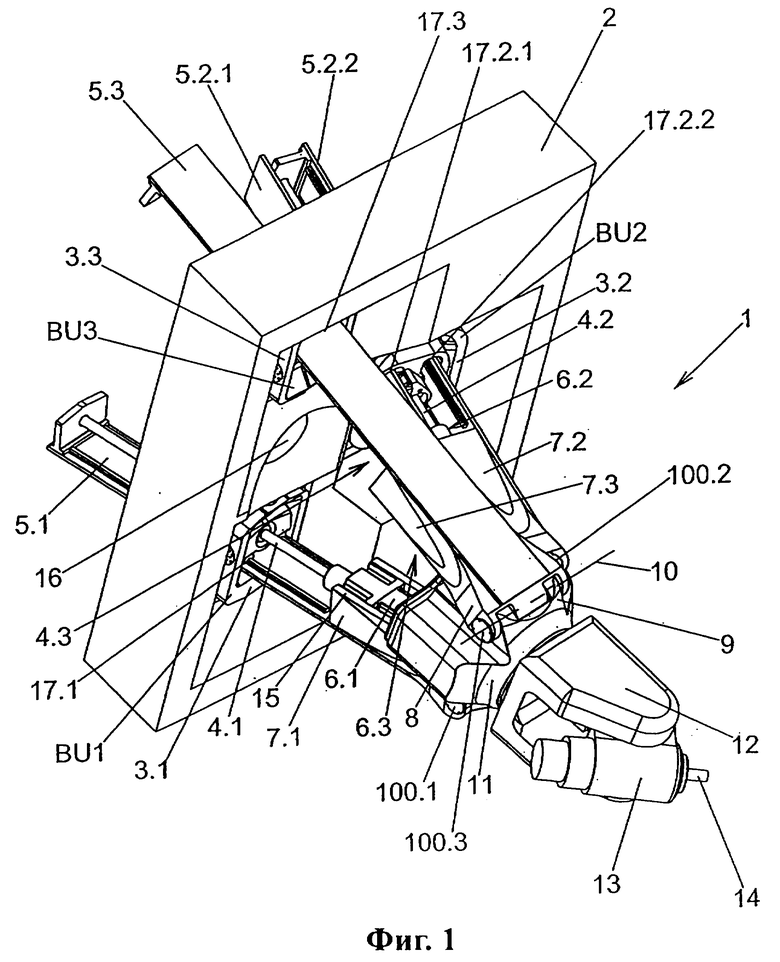
1. Параллельный кинематический механизм (1), содержащий по меньшей мере три установочных приспособления (4.1, 4.2, 4.3), имеющих возможность по отдельности удлиняться и укорачиваться, каждое из которых соединено с установочной головкой (11) посредством первого соединения (8, 9, 10) и с основанием (2) посредством карданного шарнира (3.1, 3.2, 3.3), а установочная головка (11) выполнена с возможностью перемещения в пределах рабочей зоны при маневрировании установочных приспособлений (4.1, 4.2, 4.3), отличающийся тем, что он снабжен по меньшей мере двумя усиливающими балками (5.1, 5.2, 5.2.1, 5.2.2), каждая из которых соединена с установочной головкой (11) посредством соответствующей поворотной опоры (100.1, 100.2) балки, имеющей только одну степень свободы, при этом каждая усиливающая балка (5.1, 5.2, 5.2.1, 5.2.2) расположена с возможностью скольжения в поперечном направлении в опоре (17.1, 17.2, 17.2.1, 17.2.2) балки в основании (2) при удлинении или укорачивании по меньшей мере одного установочного приспособления (4.1, 4.2, 4.3), каждая опора (17.1, 17.2, 17.2.1, 17.2.2) балки соединена с основанием (2) посредством карданного шарнира (BUI, BU2) балки, а опора (17.2, 17.2.1, 17.2.2) по меньшей мере одной усиливающей балки (5.2, 5.2.1, 5.2.2) расположена с возможностью поворота вокруг оси, расположенной параллельно продольной оси вышеупомянутой усиливающей балки (5.2, 5.2.1, 5.2.2).
2. Параллельный кинематический механизм по п.1, отличающийся тем, что по меньшей мере одна поворотная опора (100.1, 100.2) балки является первым соединением (8, 9, 10).
3. Параллельный кинематический механизм по п.2, отличающийся тем, что по меньшей мере один карданный шарнир (BU1, BU2) балки является карданным шарниром (3.1, 3.2, 3.3).
4. Параллельный кинематический механизм по п.1, отличающийся тем, что поворотная опора (100.1, 100.2) по меньшей мере одной усиливающей балки (5.1, 5.2, 5.2.1, 5.2.2) жестко соединена с установочным приспособлением (4.1, 4.2, 4.3).
5. Параллельный кинематический механизм по п.1, отличающийся тем, что первое соединение (8, 9, 10) по меньшей мере одного установочного приспособления (4.1, 4.2, 4.3) жестко соединено с усиливающей балкой (5.1, 5.2, 5.2.1, 5.2.2).
6. Параллельный кинематический механизм по любому из пп.1-5, отличающийся тем, что карданный шарнир (3.1, 3.2, 3.3) и карданный шарнир (BU1, BU2) балки включают внешний гироскопический элемент (21), который смонтирован в основании (2) с возможностью поворота вокруг внешней оси (22, 47) гироскопа, и внутренний гироскопический элемент (23, 43), который размещен во внешнем гироскопическом элементе (21) с возможностью поворота вокруг внутренней оси (24, 46) гироскопа под прямым углом к внешней оси (22, 47) гироскопа.
7. Параллельный кинематический механизм по п.6, отличающийся тем, что опора (17.1, 17.2) балки соединена либо с внутренним гироскопическим элементом (23, 43) карданного шарнира (3.1, 3.2, 3.3), либо с внутренним гироскопическим элементом карданного шарнира (BU1, BU2) балки.
8. Параллельный кинематический механизм по п.1, отличающийся тем, что каждая усиливающая балка (5.1, 5.2, 5.2.1, 5.2.2) имеет в первом направлении жесткость при изгибе значительно большую, чем жесткость при изгибе в направлении под прямым углом к упомянутому первому направлению.
9. Параллельный кинематический механизм по п.8, отличающийся тем, что каждая усиливающая балка (5.1, 5.2, 5.2.1, 5.2.2) в основном имеет поперечное сечение прямоугольной формы.
10. Параллельный кинематический механизм по п.1, отличающийся тем, что каждое установочное приспособление (4.1, 4.2, 4.3) неразъемно соединено с усиливающей балкой (5.1, 5.2, 5.2.1. 5.2.2, 5.3) в первом соединении (8, 9, 10) без промежуточного соединения или опоры.
11. Параллельный кинематический механизм по п.1, отличающийся тем, что одно из установочных приспособлений (4.2) включает дополнительную усиливающую балку (5.2.1, 5.2.2).
12. Параллельный кинематический механизм по п.1, отличающийся тем, что по меньшей мере одно установочное приспособление (4.1, 4.2, 4.3) выполнено в виде механизма винт-гайка, в котором винт или гайка (28, 52) неразъемно соединены с внутренним гироскопическим элементом (23, 43).
13. Параллельный кинематический механизм по п.1, отличающийся тем, что по меньшей мере одно установочное приспособление (4.1, 4.2, 4.3) выполнено в виде линейного двигателя.
14. Параллельный кинематический механизм по п.13, отличающийся тем, что часть линейного двигателя выполнена в виде усиливающей балки (5.1, 5,2, 5.2.1, 5.2.2, 5.3).
15. Параллельный кинематический механизм по п.1, отличающийся тем, что каждая усиливающая балка (5,1, 5.2, 5.2.1, 5.2.2, 5.3) содержит по меньшей мере один продольный первый элемент (26, 57.2, 58.2) скольжения, например планку скольжения, которая соединена по профилю со вторым элементом (27, 57.1, 58.1) скольжения, например, направляющей, при этом указанный второй элемент (27. 57.1, 58.1) скольжения соединен с внутренним гироскопическим элементом (23, 43).
16. Параллельный кинематический механизм по п.15, отличающийся тем, что второй элемент (27, 57.1, 58.1) скольжения жестко соединен с внутренним гироскопическим элементом (23, 43) или имеет возможность направления по профилю относительно указанного элемента.
17. Параллельный кинематический механизм по п.12, отличающийся тем, что винт (31, 51) механизма винт-гайка расположен с возможностью приведения в движение одного его конца двигателем (6.1, 6.2, 6.3) установочного приспособления, а другой конец винта поддерживается опорным подшипником (29), или гайка (28, 52) указанного механизма расположена с возможностью приведения в движение двигателем (6) установочного приспособления.
18. Параллельный кинематический механизм по п.17, отличающийся тем, что двигатель (6.1, 6.2, 6.3) установочного приспособления закреплен в держателе (7.1, 7.2, 7.3), один конец которого снабжен одной частью (8) указанного первого соединения (8, 9, 10), при этом держатель имеет присоединительные поверхности (15), предназначенные для крепления по меньшей мере одной усиливающей балки (5.1, 5.2.1, 5.2.2, 5.3).
19. Параллельный кинематический механизм по п.1, отличающийся тем, что оси поворотных опор (100.1, 100.2) по меньшей мере двух усиливающих балок (5.1, 5.2, 5.2.1, 5.2.2) расположены под прямым углом друг к другу.
20. Параллельный кинематический механизм по п.12, отличающийся тем, что оси поворотных опор (100.1, 100.3) балок по меньшей мере двух усиливающих балок (5.1, 5.3) параллельны друг другу.
21. Параллельный кинематический механизм по п.1, отличающийся тем, что внутренние оси (24, 46) гироскопа карданного шарнира (BU1, BU3) двух усиливающих балок (5.1, 5.3) параллельны осям соответствующих поворотных опор (100.1, 100.3) балок.
22. Параллельный кинематический механизм по п.21, отличающийся тем, что внутренние оси (24) гироскопа карданного шарнира (BU1, BU2) двух усиливающих балок (5.1, 5.3) взаимно параллельны.
| SE 452279, 23.11.1987 | |||
| Обрабатывающее устройство | 1986 |
|
SU1466935A2 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

