Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству определения равновесия при движении тела, программе определения равновесия при движении тела, способу определения равновесия при движении тела и способу диагностики равновесия при движении тела для определения равновесия при движении тела во время тренировки, такой как поступательные движения, в том числе при ходьбе и беге, или тренировки на месте, в том числе ходьба и подъем бедер.
Уровень техники
Равновесие и симметрия традиционно известны как важные элементы при оценке красоты осанки. Таким образом, оценка равновесия считается полезной для оценки красоты ходьбы и для управления ходом реабилитации.
С другой стороны, было предложено устройство определения ходьбы (смотрите патентный документ 1) для традиционного способа оценки осанки во время ходьбы. Такое устройство определения ходьбы измеряет распределение давления ноги пешехода, заставляя пешехода наступать на датчик давления, установленный на полу, чтобы оценить красоту ходьбы и степень здоровья.
Такое устройство определения параметров при ходьбе, однако, не может использоваться в месте, где не устанавливается датчик давления, как, например, при ходьбе в повседневной жизни, и, таким образом, ему недостает удобства.
Патентный документ 1: японская не рассмотренная патентная публикация № 2001-218754
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Проблемы, которые должны быть решены изобретением
С точки зрения таких проблем, задача настоящего изобретения состоит в обеспечении устройства определения равновесия при движении тела, программы определения равновесия при движении тела, способа определения равновесия при движении тела и способа диагностики равновесия при движении тела, способных определять равновесие при движении тела по смещению при выполнении тренировки для каждой ноги, даже если датчик давления не устанавливается.
Средство решения проблемы
Настоящее изобретение обеспечивает устройство определения равновесия при движении тела, содержащее средство получения сигнала равновесия тела для получения сигнала, связанного с движением тела, в котором изменение за счет движения живого организма определяется при его ношении на живом организме; средство определения равновесия при движении тела для определения равновесия при движении тела, основываясь на сигнале, связанном с движением тела, полученном средством получения сигнала, связанного с движением тела; и средство вывода результата для выполнения вывода результата, основываясь на определенном равновесии при движении тела, в котором средство определения равновесия при движении тела выполнено с возможностью осуществления процесса приема информации о ноге для распознания одного единичного шага, основываясь на сигнале, связанном с движением тела, и получения информации о ноге для каждой отдельной ноги и процесса определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге; и средство определения, имеет ли место ходьба, основываясь на сигнале, связанном с движением тела, причем определение равновесия при движении тела выполняется средством определения равновесия при движении тела, когда определяется, что ходьба имеет место.
Средство получения сигнала, связанного с движением тела, может быть выполнено посредством средства для получения сигнала, связанного с движением тела, такого как средство получения сигнала ускорения для получения сигнала ускорения, в котором определяется изменение ускорения за счет движения тела, или средства для получения сигнала, в котором определяются другие изменения за счет движения тела, или средства приема для приема сигнала, связанного с движением тела, получаемого этими средствами проводным или беспроводным способом. Средство приема сигнала ускорения может быть выполнено с помощью датчика ускорения для определения изменения ускорения или средства приема для приема сигнала ускорения, в котором изменение ускорения определяется проводным или беспроводным способом. Датчик ускорения может быть выполнен в виде одномерного датчика ускорения для определения ускорения в одном направлении, двумерного датчика ускорения для определения ускорения в двух ортогональных направлениях или трехмерного датчика ускорения для определения ускорения в трех ортогональных направлениях.
Равновесие при движении тела может быть равновесием при движении тела за счет смещения при выполнении тренировки для каждой ноги при такой тренировке, как движение вперед, в том числе ходьба и бег, или тренировке на месте, в том числе шагание и подъем бедра. Конкретно, равновесие при движении тела является равновесием при движении тела на правой ноге и на левой ноге живого организма, ходящего на двух ногах, или равновесием при движении тела на правой передней ноге, левой передней ноге, правой задней ноге и левой задней ноге живого организма, ходящего на четырех ногах.
Средство вывода результата может быть выполнено как соответствующее средство, которое выполняет вывод результата, такое как, например, средство отображения для выполнения отображения, световое средство для включения постоянного свечения или вспышек, звуковое средство для подачи звукового выходного сигнала, вибрационное средство для выполнения вибрации, средство связи для передачи информации и т.п.
Вывод результата посредством средства вывода результата может быть соответствующим выводом результата, такого как заключение об удовлетворительном или неудовлетворительном равновесии при движении тела, заключением о том, имеется ли для равновесия при движении тела наклон влево, наклон вправо или оно является нормальным, вывод результата о том, является ли длина шага каждой ноги одинаковой или имеется отклонение, вывод результата о неудовлетворительном уровне равновесия при движении тела или совокупности упомянутого выше.
Например, при отображении на средстве отображения вывод результата может делаться посредством соответствующего способа отображения, такого как отображение с помощью схематичных рисунков, меток, символов и т.п. или отображение, при котором отображение делается только тогда, когда обнаруживается или не обнаруживается аномалия.
При выводе результата с помощью светового средства вывод результата может быть сделан соответствующим переключением света, таким как, например, переключение лампочки между включением и выключением, переключение между миганием и выключением света, переключение цвета свечения и т.п. при наличии аномалии и когда аномалия отсутствует.
При выводе результата с помощью звукового средства уведомление может подаваться соответствующим звуковым сигналом, таким как уведомление об удовлетворительности или неудовлетворительности, состоянии и т.п. звуковым сигналом, включаемым как звук аварийного сигнала, или уведомление об аномалии, когда присутствует аномалия, и т.п.
При выводе результата посредством вибрационного средства вывод результата может делаться соответствующим способом, таким как вибрация только в случае, когда аномалия существует, с различием величины вибрации в зависимости от степени аномалии и т.п.
При выводе результата средством связи принимающая сторона (терминал обработки информации, который прямо или косвенно принимает данные от устройства определения равновесия при движении тела) может передавать соответствующие данные, в которых удовлетворительное и неудовлетворительное и т.д. состояние равновесия при движении тела может быть выведено средством отображения, световым средством, звуковым средством или вибрационным средством таким образом, что выводятся данные об удовлетворительности/неудовлетворительности или данные выводятся в виде числового значения.
Устройство определения равновесия при движении тела может быть устройством измерения движения тела для измерения движения тела или соответствующим устройством обработки информации для получения данных от устройства измерения при движении тела. Устройство измерения при движении тела может быть шагомером, чтобы считать количество шагов, или устройством измерения объема нагрузки для измерения объема нагрузки. Устройство обработки информации может быть переносным устройством обработки информации, таким как мобильный телефон, PDA или компьютерный ноутбук, или устройством обработки информации типа установки, такой как настольный компьютер или компьютер сервера.
Информация о ноге для каждой отдельной ноги может быть информацией, относящейся к соответствующей ноге, посылаемой по порядку или поочередно при тренировке, такой как шаг с нечетным номером и шаг с четным номером или левая нога и правая нога для живого организма, ходящего на двух ногах, первый-четвертый шаги или правая передняя нога, левая передняя нога, правая задняя нога и левая задняя нога или шаг с нечетным номером и шаг с четным номером для живого организма, ходящего на четырех ногах.
В соответствии с настоящим изобретением, равновесие при движении тела за счет отклонения при тренировке для каждой ноги может определяться, даже если датчик давления не установлен.
Дополнительно может определяться равновесие при движении тела в связи с соответствующей ногой.
В соответствии с вариантом настоящего изобретения, процесс получения информации о ноге может быть выполнен с возможностью получения информации о нечетном шаге и информации о четном шаге, разделяя информацию о ноге на информацию о нечетном шаге и о четном шаге; и процесс определения равновесия при движении тела может быть выполнен с возможностью определения отклонения от равновесия для равновесия при движении тела, сравнивая информацию о нечетном шаге и информацию о четном шаге.
В варианте настоящего изобретения процесс определения равновесия при движении тела может быть выполнен с возможностью сравнения среднего значения информации о нечетном шаге и среднего значения информации о четном шаге.
В варианте настоящего изобретения средство определения равновесия при движении тела может быть выполнено с возможностью выполнения процесса определения непрерывности для определения того, действительно ли движение тела способно непрерывно получать информацию для каждого шага, который становится информацией о ноге, из сигнала, связанного с движением тела, и выполнения процесса получения информации о ноге и процесса определения равновесия при движении тела, если информация непрерывно получается для заданного количества шагов; и невыполнения определения равновесия при движении тела, если информация не получается непрерывно для заданного количества шагов.
Поэтому равновесие при движении тела может определяться при непрерывном выполнении тренировки и точность определения равновесия при движении тела может быть улучшена.
В варианте настоящего изобретения дополнительно устанавливается средство принятия описания критерия, чтобы позволить описание пользователем критерия для определения удовлетворительности и неудовлетворительности равновесия при движении тела, в котором процесс определения равновесия при движении тела может быть выполнен с возможностью определения, удовлетворяет ли критерию информация о ноге.
Пользователь может быть лицом, использующим устройство определения равновесия при движении тела, таким как тренирующийся живой организм, носящий на себе устройство определения равновесия при движении тела, или тренер, врач, медицинский персонал и т.п., для оценки или диагностирования выполнения тренировки тренирующимся живым организмом, носящим на себе устройство определения равновесия при движении тела.
В соответствии с таким вариантом, пользователь может самостоятельно определить критерий равновесия при движении тела. Поэтому критерий может быть набором, который вначале должен быть совсем не жестким, и затем критерий, в конечном счете, может быть установлен предельно жестким, и, таким образом, критерий может меняться в соответствии с ситуацией продвижения тренировки при выполнении физических упражнений.
В варианте настоящего изобретения сигнал, связанный с движением тела, может быть выполнен с возможностью содержания в нем, по меньшей мере, сигнала ускорения в вертикальном направлении тренирующегося живого организма или сигнала ускорения в горизонтальном направлении тренирующегося живого организма.
Таким образом, может быть получен сигнал ускорения, полезный для определения равновесия при движении тела.
Настоящее изобретение может быть устройством измерения движения тела, содержащим переносной датчик определения движения тела для обнаружения изменения в движении тела живого организма при его переноске на живом организме; средство для подсчета количества шагов для подсчета количества шагов, основываясь на сигнале, связанном с движением тела, обнаруживаемым переносным датчиком определения движения тела; средство определения равновесия при движении тела для определения равновесия при движении тела, основываясь на сигнале, связанном с движением тела, определяемым переносным датчиком определения движения тела; средство отображения для выполнения отображения количества шагов, подсчитываемых средством подсчета количества шагов, и отображения равновесия при движении тела, основываясь на равновесии при движении тела, определенном средством определения равновесия при движении тела; средство хранения для хранения, по меньшей мере, подсчитанного количества шагов и средство электропитания для подачи электропитания для каждого средства.
Настоящее изобретение может быть устройством измерения движения тела, содержащим переносной датчик определения движения тела для обнаружения изменения в движении тела живого организма при его переноске на живом организме; средство для подсчета количества шагов для подсчета количества шагов, основываясь на сигнале, связанном с движением тела, обнаруживаемым переносным датчиком определения движения тела; средство определения равновесия при движении тела для определения равновесия при движении тела, основываясь на сигнале, связанном с движением тела, определяемым переносным датчиком определения движения тела; средство отображения для выполнения отображения количества шагов, подсчитываемых средством подсчета количества шагов, и отображения равновесия при движении тела, основываясь на равновесии при движении тела, определенном средством определения равновесия при движении тела; средство хранения для хранения, по меньшей мере, подсчитанного количества шагов и средство электропитания для подачи электропитания для каждого средства, в котором средство определения равновесия при движении тела выполнено с возможностью исполнения процесса получения информации о ноге для распознавания одного единичного шага, основываясь на сигнале, связанном с движением тела, и получения информации о ноге для каждой отдельной ноги и процесса определения равновесия при движении тела при определении равновесия при движении тела, основываясь на информации о ноге; и средство определения, имеет ли место ходьба, основываясь на сигнале, связанном с движением тела, причем определение равновесия при движении тела средством определения равновесия при движении тела выполняется, когда определяется, что ходьба имеет место.
Средство измерения объема тренировки может быть выполнено с помощью средства подсчета количества шагов для подсчета количества шагов при ходьбе или беге или средства измерения объема нагрузки для измерения объема нагрузки при ходьбе, уборке и т.п.
В соответствии с таким вариантом, может быть обеспечено устройство измерения движения тела, способное определять равновесие при движении тела за счет отклонения при тренировке для каждой ноги, даже если датчик давления не устанавливается.
Настоящее изобретение может также быть программой определения равновесия при движении тела, чтобы позволить компьютеру функционировать в качестве средства получения сигнала, связанного с движением тела, для получения сигнала, связанного с движением тела, в котором изменение движения тела живого организма определяется при его ношении на живом организме; средства определения, имеет ли место ходьба, основываясь на сигнале, связанном с движением тела; средства определения равновесия при движении тела для определения равновесия при движении тела на основе сигнала, связанного с движением тела; и средства вывода результата для выполнения вывода результата, основываясь на определенном равновесии при движении тела, в котором процесс получения информации о ноге для распознавания одного единичного шага, основываясь на сигнале, связанном с движением тела, и получения информации о ноге для каждой отдельной ноги и процесс определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге, выполнены с возможностью осуществления как средства определения равновесия при движении тела; и определение равновесия при движении тела с помощью средства определения равновесия при движении тела выполняется, когда ходьба имеет место.
Поэтому программа определения равновесия при движении тела может быть установлена на соответствующем компьютере, чтобы создать устройство определения равновесия при движении тела.
Настоящее изобретение может также быть способом определения равновесия при движении тела, содержащим этапы, на которых определяют равновесие при движении тела на основе сигнала, связанного с движением тела, в котором изменение движения тела определяется при ношении устройства на живом организме; и выполняют вывод результата, основываясь на определенном равновесии при движении тела, в котором этап определения равновесия при движении тела выполнен с возможностью осуществления процесса получения информации о ноге для распознавания одного единичного шага, основываясь на сигнале, связанном с движением тела, и получения информации о ноге для каждой отдельной ноги и процесса определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге; и способ дополнительно содержит этап, на котором определяют, имеет ли место ходьба, основываясь на сигнале, связанном с движением тела, причем определение равновесия при движении тела на этапе определения равновесия при движении тела выполняется, когда ходьба имеет место.
Таким образом, равновесие при движении тела может быть определено.
Настоящее изобретение может также быть способом диагностики равновесия при движении тела, содержащим прикрепление устройства определения равновесия при движении тела на средней линии тренирующегося живого организма, причем устройство определения равновесия при движении тела содержит средство получения сигнала, связанного с движением тела, для получения сигнала, связанного с движением тела, посредством которого определяется изменение за счет движения тела живого организма; средство определения равновесия при движении тела для определения равновесия при движении тела на основе сигнала, связанного с движением тела, полученного средством получения сигнала, связанного с движением тела; и средство вывода результата для выполнения вывода результата, основываясь на определенном равновесии при движении тела, причем средство определения равновесия при движении тела выполнено с возможностью осуществления процесса получения информации о ноге для распознавания одного единичного шага, основываясь на сигнале, связанном с движением тела, и получения информации о ноге для каждой отдельной ноги и процесса определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге; и средство определения, имеет ли место ходьба, основываясь на сигнале, связанном с движением тела, причем определение равновесия при движении тела средством определения равновесия при движении тела выполняется, когда ходьба имеет место; и выполнение диагностики равновесия при движении тела в соответствии с выходным результатом, основанным на равновесии при движении тела, полученным от средства вывода результата.
Соответственно, тренеры, врачи и т.п. могут диагностировать равновесие при движении тела тренирующегося живого организма. Поэтому это может использоваться для коррекции позы во время тренировки, закрепления восстановления способности к тренировке при реабилитации и т.п.
Эффект изобретения
В соответствии с настоящим изобретением, может определяться равновесие при движении тела за счет отклонения при тренировке для каждой ноги, даже если датчик давления не устанавливается.
Краткое описание чертежей
Фиг.1 - блок-схема структуры устройства измерения движения тела.
Фиг.2 - блок-схема последовательности выполнения операции, выполняемой вычислительным блоком устройства измерения движения тела.
Фиг.3(A)-3(E) - изображения на экране блока дисплея.
Фиг.4(A) и 4(B) - форма выходного сигнала блока определения ускорения во время ходьбы.
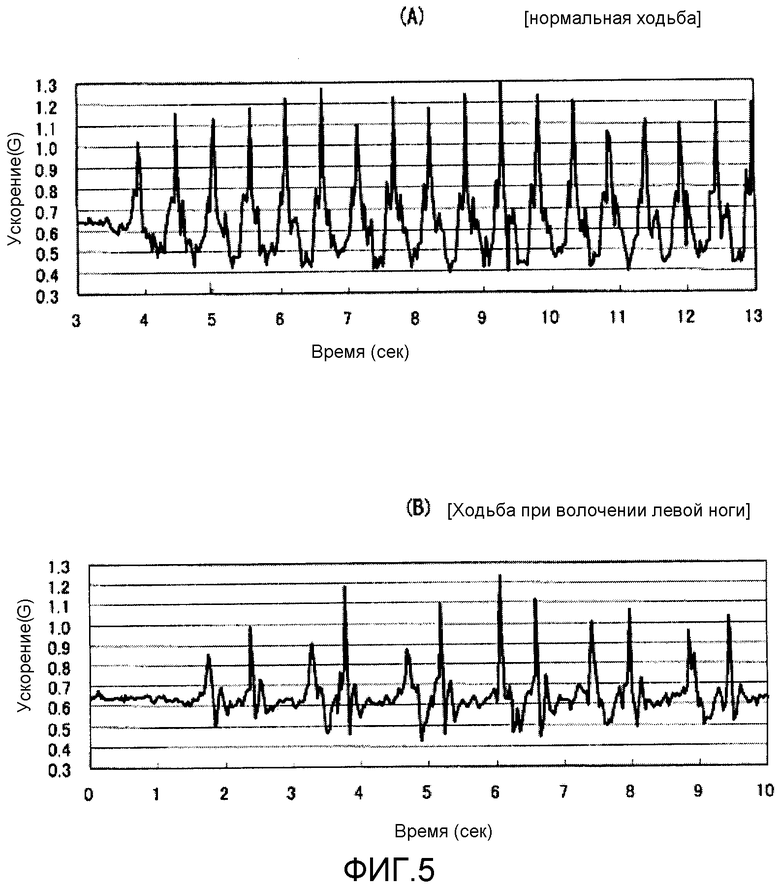
Фиг.5(A) и 5(B) - форма выходного сигнала блока определения ускорения во время ходьбы.
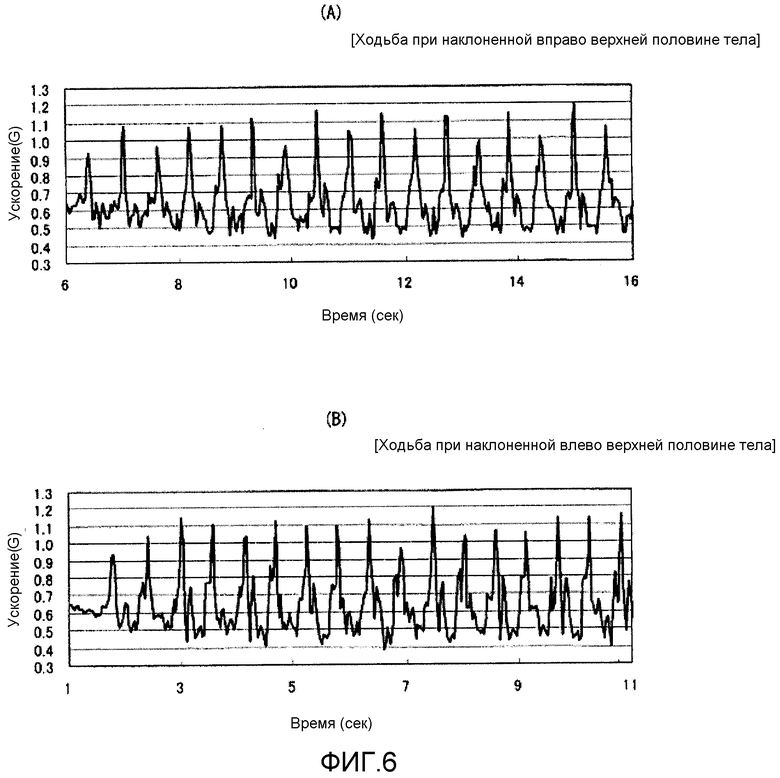
Фиг.6(A) и 6(B) - форма выходного сигнала блока определения ускорения во время ходьбы.
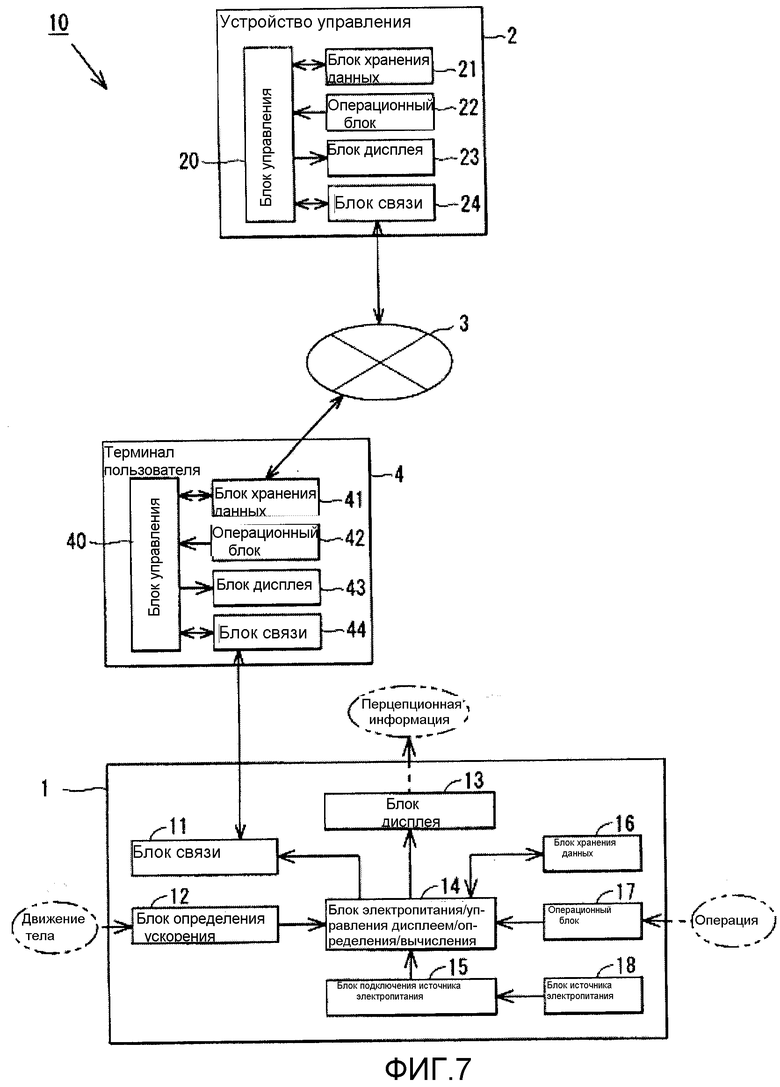
Фиг.7 - блок-схема структуры системы определения равновесия при движении тела.
Описание символов
1 - Устройство измерения движения тела
12 - Блок определения ускорения
13 - Блок дисплея
14 - Вычислительный блок
16 - Блок хранения данных
17 - Операционный блок
18 - Блок источника электропитания
Предпочтительный вариант осуществления изобретения
Пример устройства измерения движения тела для определения равновесия при ходьбе, которое является одним из видов равновесия при движении тела, будет описан ниже со ссылкой на чертежи, как один из вариантов осуществления настоящего изобретения.
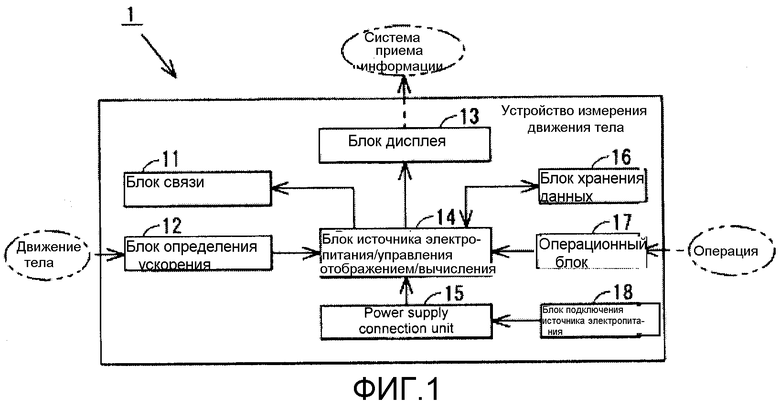
На фиг.1 представлена блок-схема структуры устройства 1 измерения движения тела.
Устройство 1 измерения движения тела содержит блок 11 связи, блок 12 определения ускорения, блок 13 дисплея, вычислительный блок 14, блок 15 подключения электропитания, блок 16 хранения данных, операционный блок 17 и блок 18 источника электропитания и сконструировано со столь малыми размерами, что помещается в руке обычного человека, так чтобы его можно было носить. Такое устройство измерения движения тела используется в качестве шагомера для подсчета количества шагов или устройства измерения объема нагрузки для измерения объема нагрузки при работе по дому, в том числе уборке, протирке и т.п.
Блок 11 связи может быть образован соответствующим интерфейсом связи, таким как порт USB (универсальная последовательная шина) для проводного соединения и Bluetooth (зарегистрированная торговая марка) для радиосвязи. Таким образом, может быть реализована связь с устройством обработки информации, таким как персональный компьютер, мобильный телефон или PDA (персональный цифровой секретарь).
Блок 12 определения ускорения является датчиком для определения ускорения вибрации, возникающей, когда пользователь, носящий устройство 1 измерения движения тела, идет пешком и т.п., и передает сигнал определения на вычислительный блок 14. Блок 12 определения ускорения может быть образован одномерным датчиком ускорения для определения ускорения в одном направлении, двумерным датчиком ускорения для определения ускорения в двух ортогональных направлениях или трехмерным датчиком ускорения для определения ускорения в трех ортогональных направлениях, где трехмерный датчик ускорения, дающий больший объем информации, является наиболее предпочтительным.
Переносное устройство 1 измерения движения тела предпочтительно крепится на средней линии ходока, чтобы правильно обнаруживать равновесие при ходьбе устройством 12 определения ускорения и, например, предпочтительно крепится на застежке пояса или в центральной части на задней стороне пояса, более предпочтительно крепится к застежке пояса.
Таким образом, устраняются условия создания различия между правой ногой и левой ногой в колебании ускорения, определяемого устройством 12 определения ускорения, когда ходьба происходит при удовлетворительном равновесии. Другими словами, например, если устройство 1 измерения движения тела прикреплено к правой ноге, сильное изменение ускорения появляется, когда правая нога ставится на землю, и изменение ускорения, когда левая нога ставится на землю, становится малым по сравнению с тем, когда правая нога ставится на землю, но этого можно избежать.
Поэтому, если устройство 1 измерения движения тела прикрепляется на средней линии, компонент движения в направлении вперед, компонент движения в вертикальном направлении и компонент движения в горизонтальном направлении сигнала ускорения легко может быть получен, снабдив устройство 12 определения ускорения трехмерным датчиком ускорения.
Блок 13 дисплея выполняется как устройство дисплея на жидких кристаллах и т.п. и отображает на экране дисплея информацию, соответствующую сигналу управления дисплеем, поступающему от вычислительного блока 14. Информация, которая должна отображаться, может быть информацией, относящейся к хождению, такой как количество шагов и равновесие при ходьбе.
Вычислительный блок 14 приводится в действие электропитанием, получаемым от блока 18 источника электропитания через блок 15 подключения источника электропитания, и принимает (обнаруживает) сигнал определения, переданный от блока 12 определения ускорения и операционного блока 17, чтобы выполнить подачу электропитания (от источника электропитания) и операционного управления (управления дисплеем) на блок 11 связи, дисплей 13 и блок 16 хранения данных. Вычислительный блок 14 также выполняет процесс вычисления, ссылаясь на данные критерия ходьбы и данные критерия одного шага, хранящиеся в блоке 16 хранения данных, основываясь на сигнале определения, переданном от блока 12 определения ускорения.
Блок 16 хранения данных хранит данные ускорения, которые являются сигналом определения, определенным блоком 12 определения ускорения, данными критерия одного шага для определения одного шага в сигнале определения, программу определения равновесия при движении тела для определения равновесия при ходьбе и т.п.
Операционный блок 17 принимает соответствующий ввод операции, такой как операция ввода информации о пользователе, содержащей вес и длину шага, операция ввода даты и времени для установки часов, операция переключения содержания дисплея для переключения содержания дисплея среди различных типов содержания, в том числе количество шагов, затраченные калории, и расстояние пешеходного перехода, и операция передачи данных для передачи данных на другой терминал обработки информации, присоединенный к блоку 11 связи, и передает сигнал ввода операции на вычислительный блок 14.
Операционный блок 17 также принимает ввод операции по критерию (первое-четвертое значение критерия равновесия) для определения удовлетворительности и неудовлетворительности равновесия при ходьбе. Ввод операции для критерия может быть соответствующим вводом, таким как выборочное указание из множества критериев, подготовленных заранее, указание изменения на заданное количество этапов в цифровой форме или указание произвольного изменения в аналоговой форме.
Блок 18 источника электропитания образован соответствующим мобильным источником электропитания, таким как перезаряжаемая батарея или незаряжаемая батарея.
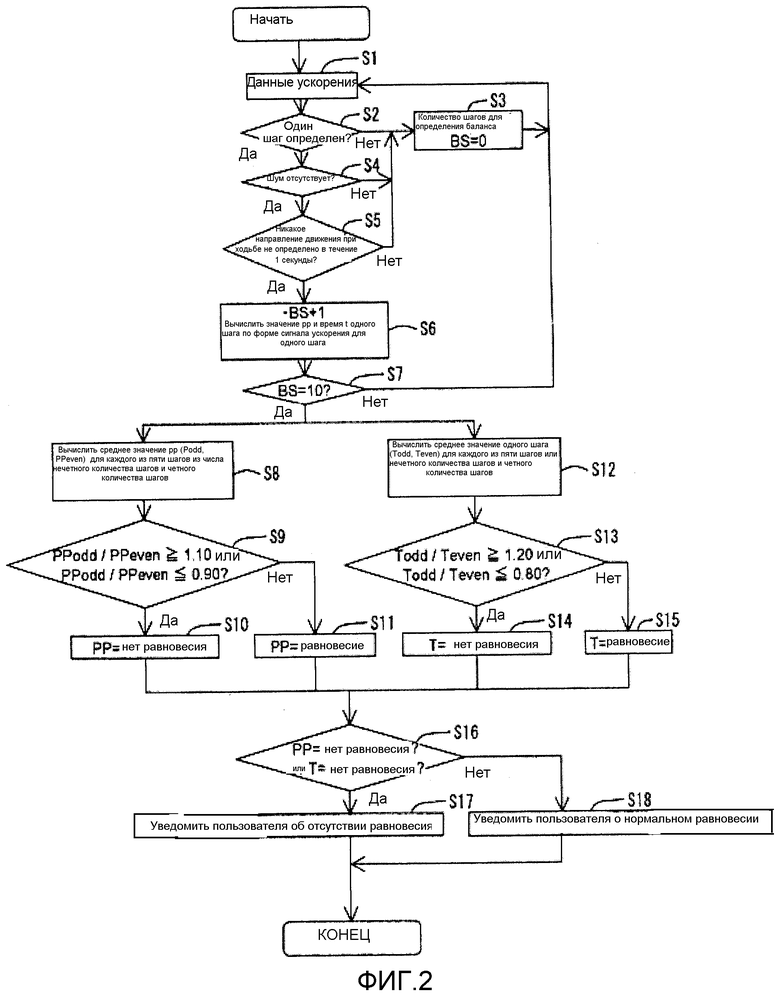
На фиг.2 представлена блок-схема последовательности выполнения операций вычислительным блоком 14 устройства 1 измерения движения тела в соответствии с программой определения равновесия при движении тела.
Вычислительный блок 14 получает данные ускорения от блока 12 определения ускорения (этап S1) и определяет один шаг из данных ускорения (этап S2). Определение одного шага может быть выполнено, основываясь на соответствующих данных критерия одного шага, такого, который, например, определяется как один шаг, если существуют данные, в которых амплитуда от локального максимального значения до локального минимального значения и время одного шага приходятся на заданное время.
Если один шаг не определен (этап S2: Нет), вычислительный блок 14 подставляет значение 0 в число шагов для определения равновесия BS, что является вариантом, и возвращается к этапу S1 (этап S3).
Если один шаг определен (этап S2: Да), вычислительный блок 14 определяет присутствие или отсутствие шума (этап S4) и выполняет этап S3, если шум присутствует (этап S4: Нет).
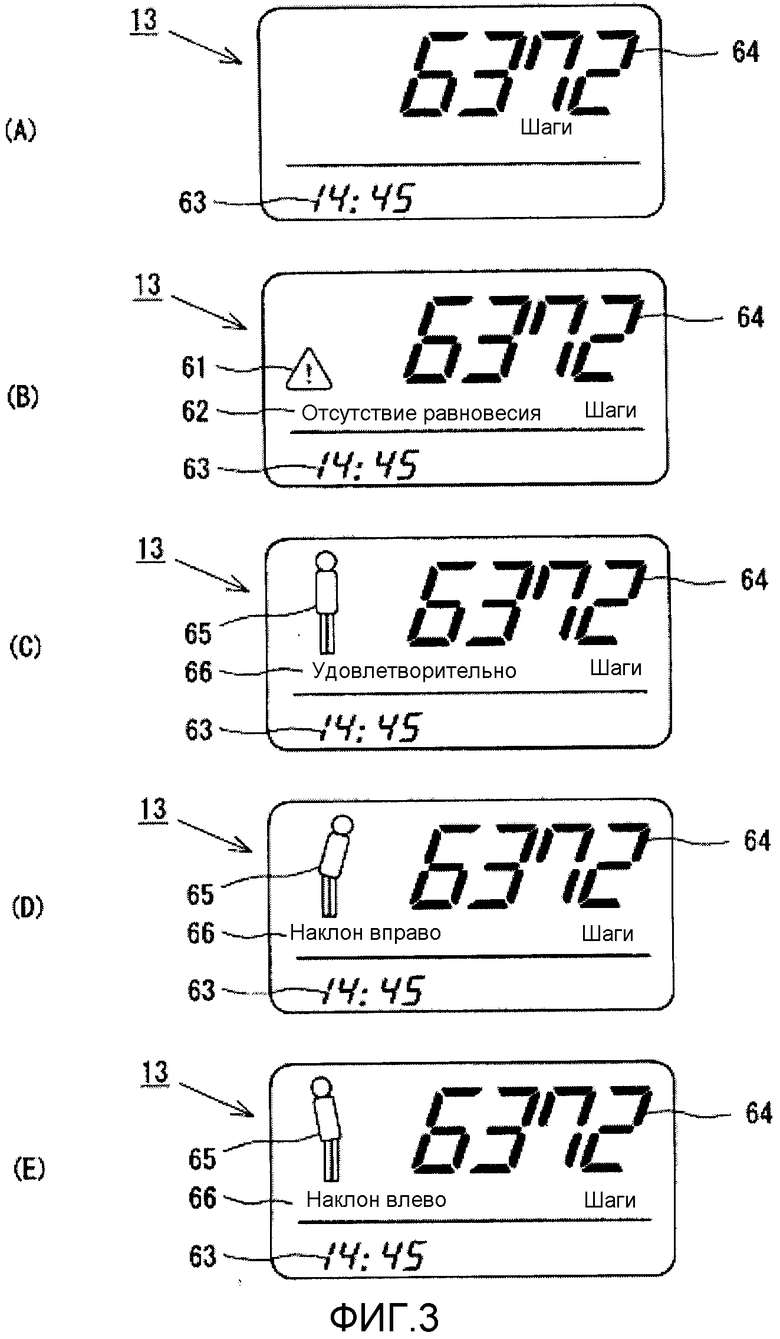
Если шум отсутствует (этап S4: Нет), вычислительный блок 14 определяет, происходит ли определение ходьбы в пределах заданного времени (времени определения прерывания ходьбы для определения, прерывается ли ходьба, например, на одну секунду) (этап S5), и выполняет этап S3, если никакое определение ходьбы не превышает заданное время (этап S5: Нет). Если шум на этапе S4 отсутствует, вычислительный блок 14 считает один определенный шаг в качестве шага и отображает подсчитанное количество шагов на экране дисплея 13, как показано на изображении экрана на фиг.3(A), а также запоминает подсчитанное количество шагов в блоке 16 хранения данных. В примере, показанном на фиг.3(A), количество шагов 64 и время 63 отображаются на экране блока 13 дисплея.
Если в пределах заданного времени никакое определение ходьбы не происходит (этап S5: Да), вычислительный блок 14 добавляет 1 к количеству шагов BS для определения равновесия и вычисляет значение PP (амплитуда одного шага от локального максимального значения до локального минимального значения) и время T одного шага (продолжительность сигнала ускорения для одного шага) по форме сигнала ускорения для одного шага (этап S6).
Вычислительный блок 14 повторяет этапы S1-S6, описанные выше, пока количество шагов BS для определения равновесия не станет равным заданному значению (в этом примере значение 10 для определения непрерывности заданного количества шагов указывает 10 шагов) (этап S7: Нет).
Когда количество шагов BS для определения равновесия достигает заданного значения (этап S7: Да), вычислительный блок 14 выполняет процесс определения равновесия при ходьбе (этапы S8-S11) по амплитуде и процесс определения равновесия при ходьбе (этапы S12-S15) по времени одного шага.
Для выполнения процесса определения равновесия при ходьбе по амплитуде вычислительный блок 14 вычисляет среднее значение (PPodd) значений PP нечетных шагов для половины (пять шагов в этом примере) заданного значения на этапе S7 и значение (PPeven) значений PP четных шагов для половины заданного значения на этапе S7 (этапе S8).
Вычислительный блок 14 определяет, является ли значение PP для четных шагов (PPodd)/значение PP для нечетных шагов (PPeven) большим или равным значению первого критерия равновесия (1,10 в этом примере) или является ли значение PP для четных шагов (PPodd)/значение PP для нечетных шагов (PPeven) меньшим или равным значению второго критерия равновесия (0,90 в этом примере) (этап S9).
Если значение PP для четного числа шагов (PPodd)/значение PP для нечетного числа шагов (PPeven) больше или равно значению первого критерия равновесия или меньше или равно значению второго критерия равновесия (этап S9: Да), вычислительный блок 14 определяет, что равновесие при ходьбе является неудовлетворительным и выводит надпись "Unbalanced" (нет равновесия), которая указывает на неудовлетворительное равновесие при ходьбе, вместо "walking balance PP" (равновесие при ходьбе по значению РР), что является вариантом (этап S10).
Если значение PP четных шагов (PPodd)/значение PP нечетных шагов (PPeven) находится в пределах диапазона от значения первого критерия равновесия до значения второго критерия (этап S9: Нет), вычислительный блок 14 определяет, что равновесие при ходьбе является удовлетворительным и устанавливает индикацию "Balanced" (равновесие), которая указывает удовлетворительное равновесие при ходьбе, вместо "walking balance PP", что является вариантом (этап S11).
После этапа S7 вычислительный блок 14 для выполнения процесса определения равновесия при ходьбе по времени одного шага вычисляет среднее значение (Todd) времени T одного шага по числу нечетных шагов половины (пять шагов в этом примере) заданного количества шагов на этапе S7 и время T (Teven) одного шага по числу четных шагов половины заданного количества шагов на этапе S7 (этап S12).
Информация о шагах с нечетным номером Todd и PPodd может быть создана как информация для одной ноги, информация о шагах с четным номером Teven и PPeven может быть создана как информация для другой ноги, так чтобы информация об одной ноге и информация о другой ноге могли быть сравнены.
Вычислительный блок 14 определяет, является ли время T одного шага для четного шага (Todd)/время T одного нечетного шага (Teven) большим или равным третьему значению критерия равновесия (1,20 в этом примере) или является ли время T одного шага для четного шага (Todd)/время T одного нечетного шага (Teven) меньшим или равным четвертому значению критерия равновесия (0,80 в этом примере) (этап S13).
Если время T одного четного шага (Todd)/время T одного нечетного шага (Teven) больше или равно третьему значению критерия равновесия или меньше или равно четвертому значению критерия равновесия (этап S13: Да), вычислительный блок 14 определяет, что равновесие при ходьбе является неудовлетворительным и устанавливает индикацию "Unbalanced", указывающую на неудовлетворительное равновесие при ходьбе, вместо "walking balance T" (равновесие при ходьбе по значению Т), что является вариантом (этап S14).
Если время T одного четного шага (Todd)/время T одного нечетного шага (Teven) находится в пределах диапазона от третьего значения критерия равновесия до четвертого значения критерия (этап S13: Нет), вычислительный блок 14 решает, что равновесие при ходьбе является удовлетворительным и устанавливает индикацию "Balanced", которая указывает на удовлетворительное равновесие при ходьбе, вместо "walking balance T", что является вариантом (этап S15).
Вычислительный блок 14 подтверждает равновесие при ходьбе по значению РР и равновесие при ходьбе по значению T и уведомляет пользователя о нарушении равновесия (этап S17), если индикация "Unbalanced" устанавливается вместо любой другой индикации (этап S16: Да). Для уведомления пользователя в этом случае могут быть приняты различные способы уведомления. Например, на экран дисплея 13 могут быть выведены предупреждающая отметка 61 или изображение 62 нарушения равновесия, указывающее на нарушение равновесия, как показано на фиг.3(B), изображение 65, в котором человек наклоняется вправо или влево, или символ 66 с описанием состояния, указывающий "satisfactory" (удовлетворительно), "tilt to right" (наклон вправо) или "tilt to left" (наклон влево), как показано на фиг.3(D) и фиг.3(E); отдельно расположенный светодиод и т.п. может светиться непрерывно или мигать красным и т.д., может включаться звуковая сигнализация отдельно установленным расположенным звуковым выходным устройством, может вибрировать отдельно установленное вибрационное устройство (вибрационное устройство) или может устанавливаться несколько устройств из числа упомянутых выше.
При отображении на экране наклона вправо или наклона влево пользователь выбирает специальный режим, такой как режим определения наклона, и затем указывает или выбирает, является ли первый шаг шагом левой ногой или правой ногой, в специальном режиме, чтобы выполнить измерение. Вычислительный блок 14 может затем определять соответствие значения PP четного шага (PPodd) и значения PP нечетного шага (PPeven) для правой ноги и левой ноги, соответственно, и наклон вправо или наклон влево может быть определен в результате сравнения значения PP четного шага (PPodd) и значения PP нечетного шага (PPeven), так что направление наклона может быть выведено как результат согласно показанному на фиг.3(D) и фиг.3(E).
Уведомление о нарушении равновесия предпочтительно выполняется в режиме реального времени или в момент времени, как можно более близкий к реальному времени во время ходьбы. В этом случае пользователь, который ходит, сможет узнать о нарушении равновесия, не видя устройства 1 измерения движения тела, если уведомление делается с помощью звука или вибрации. Таким образом, когда пользователь уведомляется о нарушении равновесия, он может сразу ввести поправку, чтобы ходьба происходила в равновесии, и сможет знать, что ходьба была исправлена, когда исчезнет уведомление о нарушении равновесия.
Если в индикации равновесия по значению РР при ходьбе и равновесия по значению Т при ходьбе не происходит изменения на "Unbalanced" (этап S16: Нет), то вычислительный блок 14 уведомляет пользователя о нормальном равновесии (этап S18).
В качестве способа уведомления пользователя в этом случае могут быть приняты различные способы. Например, как показано на фиг.3(C), на экран дисплея 13 может быть выведен символ 66 состояния "satisfactory" (удовлетворительно), указывающий на нормальное равновесие, изображение 65, на котором человек стоит прямо или идет, отдельно расположенный светодиод и т.п. может светиться непрерывно или вспыхивать синим цветом и т.д., отдельно расположенное вибрационное устройство (вибрационное устройство) может вибрировать или может быть установлено несколько этих устройств. В случае нормального равновесия сигнализация может быть выполнена таким образом, что уведомление пользователю может не подаваться. В таком случае уведомление подается только в случае нарушения равновесия, так что задача заставлять постоянно подтверждать пользователю удовлетворительность и неудовлетворительность равновесия может быть опущена.
При наличии описанной выше структуры и порядка работы удовлетворительность и неудовлетворительность равновесия при ходьбе может быть определена и выведена в качестве результата. В частности, определение может быть сделано отдельно для нечетного шага и четного шага, так чтобы могли быть определены равновесие слева и справа или равновесие в горизонтальном направлении, присущие пользователю во время ходьбы.
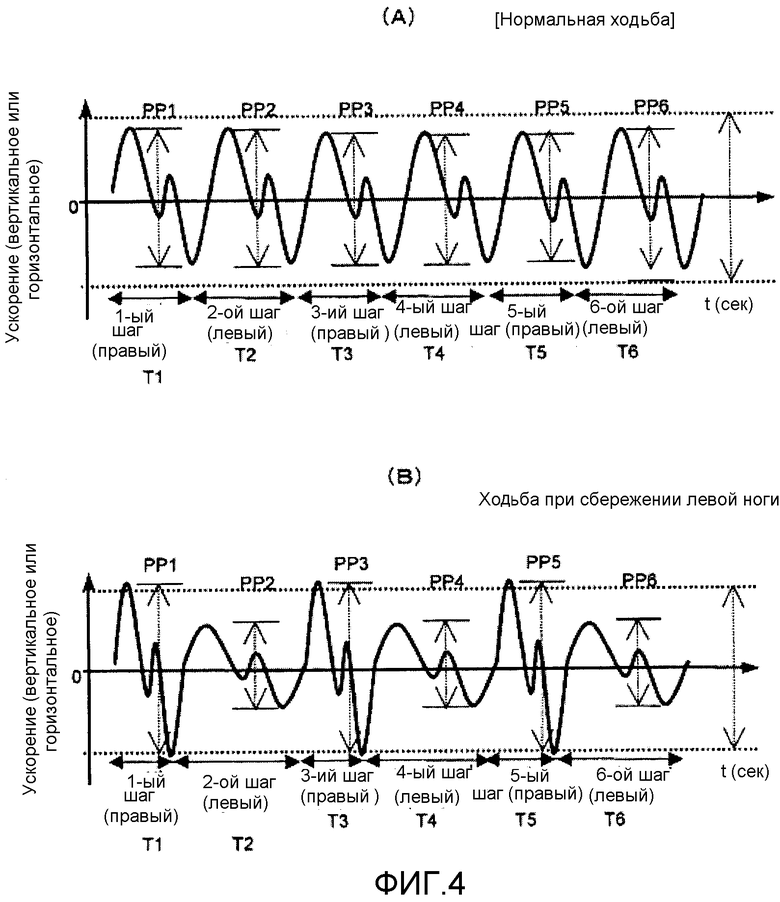
Специальное описание при ходьбе с нормальным равновесием значения PP (PP1-PP6) и времени T одного шага (T1-T6) имеет разницу только лишь в шаге правой ногой (нечетном шаге) и в шаге левой ногой (четном шаге), как показано на фиг.4(A) и фиг.5(A). Поэтому, когда значение PP для четного шага (PPodd)/значение PP для нечетного шага (PPeven) и время T одного шага для четного шага (Todd)/время T одного шага для нечетного шага (Teven) становится близким к единице (в пределах диапазона нормы), может быть сделано заключение, что равновесие является удовлетворительным.
С другой стороны, при ходьбе, когда левая нога недогружается, значение PP (PP1-PP6) и время T одного шага (T1-T6) имеют значительные различия для шага правой ноги (нечетного шага) и для шага левой ногой (четного шага), как показано на фиг.4(B). Поэтому значение PP для четного шага (PPodd)/значение PP нечетного шага (PPeven) или время T одного четного шага (Todd)/время T нечетного шага (Teven) становится значением, далеким от единицы (за пределами диапазона нормы), и может быть сделано заключение, что равновесие является неудовлетворительным.
При ходьбе с волочением правой ноги происходит отклонение по времени одного шага и амплитуде для шага левой ногой и шага правой ногой, как показано на фиг.5(B). Поэтому значение PP для четного шага (PPodd)/значение PP для нечетного шага (PPeven) или время T четного шага (Todd)/время T нечетного шага (Teven) становится значением, далеким от единицы (за пределами диапазона нормы), и может быть сделано заключение, что равновесие является неудовлетворительным.
Если верхняя половина тела наклоняется вправо, как показано на фиг.6(A), или верхняя половина тела наклоняется влево, как показано на фиг.6(B), возникает отклонение по времени одного шага и амплитуде одного шага левой ноги и шага правой ноги. Поэтому значение PP для четного шага (PPodd)/значение PP для нечетного шага (PPeven) или время T одного шага для четного шага (Todd)/время T одного шага для нечетного шага (Teven) становится значением, далеким от единицы (за пределами диапазона нормы), и может быть сделано заключение, что равновесие является неудовлетворительным.
Поэтому неудовлетворительное равновесие может быть определено для различных равновесий при ходьбе и пользователю может быть подано уведомление. Поэтому устройство 1 измерения движения тела для определения равновесия при ходьбе может использоваться для обучения красивой походке, подобной манекенщице, использоваться для обучения здоровой ходьбе с удовлетворительным равновесием при ходьбе и использоваться для управления прогрессом при реабилитации для тренировки походки.
Так как равновесие при ходьбе может быть определено с помощью одного только устройства 1 измерения движения тела, работа по укладке датчиков давления на полу не требуется, и может быть обеспечено обладающее превосходным удобством устройство 1 измерения движения тела, способное определять равновесие при ходьбе в различных местах в повседневной жизни.
Так как о неудовлетворительном равновесии при ходьбе пользователь может уведомляться различными способами, пользователь может узнавать о неудовлетворительном равновесии при ходьбе и осознать, какой должна быть ходьба с удовлетворительным равновесием.
Так как используется значение, полученное делением значения, соответствующего четному шагу (время или амплитуда одного шага), и значения, соответствующего нечетному шагу (время или амплитуда одного шага), на значения для другого шага (то есть не абсолютное, а относительное значение четного шага и нечетного шага), удовлетворительность и неудовлетворительность равновесия при ходьбе может определяться независимо от индивидуальных различий, таких как длина шага каждого человека и величина движения вверх и вниз во время ходьбы.
В соответствии со структурой настоящего изобретения и варианта осуществления, описанного выше,
устройство определения равновесия при движении тела и компьютер согласно настоящему изобретению соответствуют устройству 1 измерения движения тела варианта осуществления; и, аналогично,
датчик ускорения соответствует блоку 12 определения ускорения,
сигнал, связанный с движением тела, и сигнал ускорения соответствуют сигналу определения, создаваемому блоком 12 определения ускорения,
средство вывода результата и средство отображения соответствуют блоку 13 дисплея,
отображение равновесия при движении тела соответствует уведомлению и рисунку, показывающему нарушения равновесия, отображаемые на экране дисплея 13, постоянному свечению или миганию светодиода, звуковому указанию устройства вывода звукового сигнала или вибрации вибрационного устройства,
средство определения равновесия при движении тела соответствует вычислительному блоку 14 для выполнения этапа S9, этапа S13 или этапов S9, S13, S16,
средство подсчета количества шагов соответствует вычислительному блоку 14 для хранения подсчитанного количества шагов после этапа S4,
отображение количества шагов соответствует вычислительному блоку 14 для отображения на экране дисплея подсчитанного количества шагов после этапа S4,
средство хранения соответствует блоку 16 хранения данных,
средство источника электропитания соответствует блоку 18 электропитания,
информация о ноге соответствует PPodd, Todd, PPeven и Teven,
амплитуда сигнала ускорения соответствует PPodd и PPeven,
время одного шага сигнала ускорения соответствует Todd и Teven,
процесс определения непрерывности соответствует этапу S7,
процесс сравнения амплитуд соответствует этапу S8,
процесс получения информации о ноге соответствует этапу S8 и этапу S12,
процесс определения равновесия при движении тела соответствует этапу S9, этапу S13 или этапам S9, S13, S16,
процесс сравнения времени одного шага соответствует этапу S13,
заданное количество шагов соответствует десяти шагам,
критерий соответствует первому-четвертому значениям критерия равновесия,
средство принятия описания критерия соответствует операционному блоку 17,
сигнал ускорения в вертикальном направлении тренирующегося живого организма соответствует вертикальному компоненту сигнала ускорения,
сигнал ускорения в горизонтальном направлении тренирующегося живого организма соответствует горизонтальному компоненту сигнала ускорения, и
равновесие при движении тела соответствует отклонению во времени одного шага и амплитуды правой ноги и левой ноги во время ходьбы,
причем настоящее изобретение не ограничивается только конфигурацией описанного выше варианта осуществления и могут быть получены различные варианты осуществления.
Например, устройство 1 измерения движения тела может быть выполнено с возможностью определения не только равновесия при ходьбе, но и равновесия при движении тела, такого как равновесие при ходьбе, равновесие при переступании или равновесии при подъеме бедер. В таком случае может быть определено равновесие при движении тела пользователя, несущего устройство на себе, равновесие при упражнениях для ног, связанных с тренировкой ног (ходьба, бег, переступание, подъем бедер) пользователя, носящего на себе устройство, или равновесие влево и вправо в горизонтальном направлении пользователя, носящего на себе устройство, при различных физических упражнениях.
Устройство 1 измерения движения тела может быть выполнено с возможностью более точной установки первого-четвертого значений критерия равновесия, чтобы сузить диапазон для определения равновесия как нормального, или чтобы выводить значение PPodd/PPeven или Todd/Teven таким, какое оно есть. Таким образом, может быть определена незначительная разница в равновесиях при движении тела, что становится полезным при диагностике равновесия при движении тела спортсмена и при диагностике для восстановления способности к тренировкам при реабилитации. В таком случае соответствующий диапазон (диапазон, в котором равновесие при движении тела определяется как удовлетворительное) может быть установлен узким соответственно улучшению равновесия при движении тела, если первое-четвертое значения критерия равновесия могут быть установлены более точно с помощью работы операционного блока 17.
Дополнительно могут быть установлены терминал 4 пользователя, способный осуществлять связь с устройством 1 измерения движения тела через блок 11 связи, и устройство 2 управления, способное осуществлять связь с терминалом 4 пользователя через Интернет 3, чтобы получить систему 10 определения равновесия при движении тела, как показано на фиг.7.
В этом случае устройство 2 управления является, например, соответствующим компьютером, используемым в качестве серверного устройства, и содержит блок 20 управления, блок 21 хранения данных, операционный блок 22, блок 23 дисплея, блок 24 связи и т.п. Блок 24 связи может быть выполнен как соответствующее устройство связи, такое как панель LAN с проводным подключением или беспроводная панель LAN для беспроводной связи.
Устройство управления 2 принимает данные от устройства 1 измерения движения тела через терминал 4 пользователя в процессе операции операционного блока 22, выполняемой оператором, и отображает вывод результата, основанного на таких данных, на экране блока 23 дисплея. На экране с выходным результатом отображаются количество шагов, нормальное/аномальное равновесие и т.п.
Терминал 4 пользователя выполнен, например, в виде персонального компьютера и т.п. и содержит блок 40 управления, блок 41 связи, операционный блок 42, блок 43 дисплея и блок 44 связи. Блок 41 связи может быть выполнен в виде соответствующего устройства связи, такого как проводная панель LAN или беспроводная панель LAN для беспроводной связи. Блок 44 связи может быть выполнен в виде соответствующего интерфейса связи, такого как проводной порт USB (универсальная последовательная шина) или Bluetooth (зарегистрированная торговая марка) для беспроводной связи.
Терминал 4 пользователя обладает функцией получения данных от устройства 1 измерения движения тела через блок 44 связи и отображения графиков и таблиц, основываясь на данных на блоке 43 дисплея, и функцией передачи данных на устройство 2 управления. Количество шагов, нормальное/аномальное равновесие и т.п. отображаются на экране, отображаемом на дисплее 43.
Терминал 4 пользователя не ограничивается персональным компьютером и может быть выполнен в виде соответствующего устройства, такого как мобильное устройство обработки информации, в том числе PDA (персональные цифровые секретари) или мобильный телефон.
При такой структуре тренеры и врачи могут убедиться в равновесии при движении тела в режиме реального времени и провести тренировку и диагностику удовлетворительно, отображая результаты определения и результаты принятия решения о равновесии при движении тела на средстве отображения (блок 43 дисплея и блок 23 дисплея) терминала обработки информации (терминала 4 пользователя и устройства 2 управления). Дополнительно, тренеры и врачи могут изменить опорный сигнал в реальном времени, принимая структуру с вводом первого-четвертого значений критерия с помощью операционного средства (операционный блок 42 и операционный блок 22) терминала обработки информации (терминал 4 пользователя и устройство 2 управления). В этом случае структура может быть выполнена с возможностью сохранения первого-четвертого значений критерия равновесия и программы определения равновесия при движении тела в терминале обработки информации (терминал 4 пользователя и устройство 2 управления), и вычисление может быть выполнено терминалом обработки информации (терминал 4 пользователя и устройство 2 управления) при приеме сигнала ускорения от устройства 1 измерения при движении тела.
Настоящее изобретение может использоваться не только в случае людей, ходящих на двух ногах, но и для определения равновесия при движении тел животных, ходящих на четырех ногах или ходящих на двух ногах, таких как домашние животные и племенные животные. В этом случае настоящее изобретение может применяться при медицинской проверке домашних животных и племенных животных, которые не могут говорить о симптомах, чтобы, например, диагностировать, ходят ли домашние животные или племенные животные, волоча ногу.
Промышленная применимость
Настоящее изобретение может использоваться в устройстве определения равновесия при движении тела, устройстве измерения движения тела, способе определения равновесия при движении тела, программе определения равновесия при движении тела и способе диагностики равновесия при движении тела, чтобы обнаруживать равновесие при движении тела.
Дополнительно, настоящее изобретение может использоваться не только в случае людей, ходящих на двух ногах, но и для определения равновесия при движении тела животных, ходящих на четырех ногах или ходящих на двух ногах, таких как домашние животные и племенные животные.
Изобретение относится к медицинской технике, а именно к устройствам и способам определения равновесия при движении тела. Устройство содержит блок получения сигнала, связанного с движением тела, блок определения равновесия при движении тела и блок вывода результата. Блок получения сигнала получает сигнал при прикреплении его к живому организму. Блок определения равновесия содержит средство получения информации для распознавания одного единичного шага из сигнала, связанного с движением тела, и получения информации о каждой отдельной ноге живого организма, средство определения равновесия при движении тела и блок определения, который определяет, указывает ли сигнал, связанный с движением тела, на ходьбу. Определение равновесия при движении тела посредством блока определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место. В другом варианте устройство включает переносной датчик определения движения тела, прикрепляемый к живому организму, блок подсчета шагов из сигнала, связанного с движением тела, блок определения равновесия, блок отображения, блок хранения количества шагов, блок подачи электропитания. Устройство также содержит машиночитаемый носитель, хранящий программу для выполнения способа. Способы содержат этапы работы элементов устройств. Использование группы изобретений позволяет определять равновесие при движении тела за счет отклонения при тренировке для каждой ноги и не требует присутствия датчика давления. 5 н. и 5 з.п. ф-лы, 7 ил.
1. Устройство определения равновесия при движении тела, содержащее:
блок получения сигнала, связанного с движением тела, который получает сигнал, связанный с движением тела, в котором определяется изменение в движении тела живого организма, причем блок получения сигнала, связанного с движением тела, получает сигнал, связанный с движением тела, когда он прикреплен к живому организму;
блок определения равновесия при движении тела, который определяет равновесие при движении тела из сигнала, связанного с движением тела, полученного блоком получения сигнала, связанного с движением тела; и
блок вывода результата, который выполняет вывод результата, основываясь на определенном при движении тела равновесии,
при этом блок определения равновесия при движении тела содержит:
средство получения информации для распознавания одного единичного шага из сигнала, связанного с движением тела, и получения информации о ноге, для каждой отдельной ноги живого организма; и
средство определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге; и
блок определения, который определяет, указывает ли сигнал, связанный с движением тела, на ходьбу, причем определение равновесия при движении тела посредством блока определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место.
2. Устройство определения равновесия при движении тела по п.1, в котором
средство получения информации о ноге получает информацию о нечетном шаге и информации о четном шаге путем разделения информации о ноге для нечетного шага и четного шага; и
средство определения равновесия при движении тела определяет отсутствие равновесия для равновесия при движении тела, сравнивая информацию для нечетного шага с информацией для четного шага.
3. Устройство определения равновесия при движении тела по п.2, в котором средство определения равновесия при движении тела сравнивает среднее значение информации для нечетных шагов и среднее значение информации для четных шагов.
4. Устройство определения равновесия при движении тела по п.3, в котором блок определения равновесия при движении тела содержит средство определения непрерывности для определения, возможно ли непрерывно получать информацию о движении тела для каждого шага, и становится ли непрерывно полученная информация из сигнала, связанного с движением тела, информацией о ноге, при этом средство получения информации о ноге и средство определения равновесия при движении тела приводятся в действие, если информация непрерывно получается для заданного количества шагов, и не приводятся в действие, если информация не получается непрерывно в течение заданного количества шагов.
5. Устройство определения равновесия при движении тела по п.1, в котором процесс определения равновесия при движении тела сравнивает среднее значение информации для нечетных шагов и среднее значение информации для четных шагов.
6. Устройство определения равновесия при движении тела по п.5, в котором блок определения равновесия при движении тела содержит средство определения непрерывности для определения, возможно ли непрерывно получать информацию о движении тела для каждого шага, и становится ли непрерывно полученная информация из сигнала, связанного с движением тела, информацией о ноге, и блок определения равновесия при движении тела приводит в действие средство получения информации о ноге и средство определения равновесия при движении тела, если информация непрерывно получается для заданного количества шагов, и не приводит в действие, если информация не получается непрерывно в течение заданного количества шагов.
7. Устройство измерения движения тела, содержащее:
переносной датчик определения движения тела, который определяет изменение движения тела живого организма, когда переносной датчик определения движения тела прикреплен к живому организму;
блок подсчета шагов, который подсчитывает количество шагов из сигнала, связанного с движением тела, определенного переносным датчиком определения движения тела;
блок определения равновесия при движении тела, который определяет равновесие при движении тела из сигнала, связанного с движением тела, определенного переносным датчиком определения движения тела;
блок отображения, который отображает подсчитанное количества шагов, которое подсчитывается блоком подсчета шагов, и равновесие при движении тела, определенное блоком определения равновесия при движении тела;
блок хранения, который хранит по меньшей мере подсчитанное количество шагов; и
блок подачи электропитания, который подает электропитание,
при этом блок определения равновесия при движении тела содержит:
средство получения информации о ноге для распознавания одного единичного шага из сигнала, связанного с движением тела, и получения информации о ноге, для каждой ноги живого организма; и
средство определения равновесия при движении тела для определения равновесия при движении тела, основываясь на информации о ноге; и
блок определения, который определяет указывает ли сигнал, связанный с движением тела, на ходьбу, причем определение равновесия при движении тела посредством блока определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место.
8. Способ определения равновесия при движении тела, содержащий этапы, на которых:
определяют равновесие при движении тела из сигнала, связанного с движением тела, блоком получения сигнала, связанного с движением тела, в котором определяется изменение в движении тела живого организма, причем блок получения сигнала, связанного с движением тела, получает сигнал, связанный с движением тела, когда он прикреплен к живому организму; и
выполняют вывод результата, основываясь на определенном равновесии при движении тела,
при этом этап определения равновесия при движении тела содержит:
распознавание путем процесса получения информации о ноге одного единичного шага из сигнала, связанного с движением тела, и получение информации о ноге для каждой ноги живого организма;
определение путем процесса определения равновесия при движении тела равновесия при движении тела, основываясь на информации о ноге; и
определение блоком определения, указывает ли сигнал, связанный с движением тела, на ходьбу, причем определение равновесия при движении тела посредством этапа определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место.
9. Способ диагностики равновесия при движении тела, содержащий этапы, на которых:
прикрепляют устройство определения равновесия при движении тела на средней линии живого организма, причем устройство определения равновесия при движении тела содержит (1) блок получения сигнала, связанного с движением тела, который получает сигнал, связанный с движением тела, в котором определяется изменение в движении тела живого организма; (2) блок определения равновесия при движении тела, который определяет равновесие при движении тела из сигнала, связанного с движением тела, полученного блоком получения сигнала, связанного с движением тела; и (3) блок вывода результата, который выполняет вывод результата, основываясь на определенном при движении тела равновесии, причем блок определения равновесия при движении тела выполняет этапы, на которых:
распознают путем процесса получения информации о ноге один единичный шаг из сигнала, связанного с движением тела, и получают информацию о ноге для каждой ноги живого организма;
определяют путем процесса определения равновесия при движении тела равновесие при движении тела, основываясь на информации о ноге;
определяют блоком определения, указывает ли сигнал, связанный с движением тела, на ходьбу,
при этом определение равновесия при движении тела блоком определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место; и
диагностируют равновесие движения тела в соответствии с выводом результата, основываясь на равновесии при движении тела, полученном от блока вывода результата.
10. Машиночитаемый носитель информации, который хранит исполняемую программу, которая инструктирует микропроцессор выполнять способ по п.8.
| US 2006251334 A1, 09.11.2006 | |||
| US 2005110648 A1, 26.05.2005 | |||
| JP 2008073077 A, 03.04.2008 | |||
| JP 2000304566 A, 02.11.2000 | |||
| US 2006195050 A1, 31.08.2006 | |||
| СПОСОБ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ ТЕЛА ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325847C2 |

