ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области электротранспортных средств, в частности к многодвигательным электротранспортным средствам, содержащим по меньшей мере два ведущих колеса, каждое из которых приводится в движение независимым электроприводом.
УРОВЕНЬ ТЕХНИКИ
При использовании в многодвигательном электротранспортном средстве двух независимых электроприводов на одной оси или на каждой из осей возникает проблема рационального управления независимыми электроприводами.
Известно электротранспортное средство (WO 01/54939 А2, В60К 26/00), содержащее по меньшей мере два электрически приводимых в действие колеса и предложен способ для координации указанных по меньшей мере двух ведущих колес с помощью внешнего управляющего устройства. При этом управляющая система колеса осуществляет его установку в ведущем положении или в ведомом положении. Выбор установки осуществляет внешнее управляющее устройство, например, на основании скорости колеса - колесо с наибольшей скоростью вращения выбирают в качестве ведущего, остальные в качестве ведомых. Недостатком известного решения является возможность неравномерной загрузки ведущих колес и невозможность обеспечить требуемое распределение нагрузки в контуре скорости.
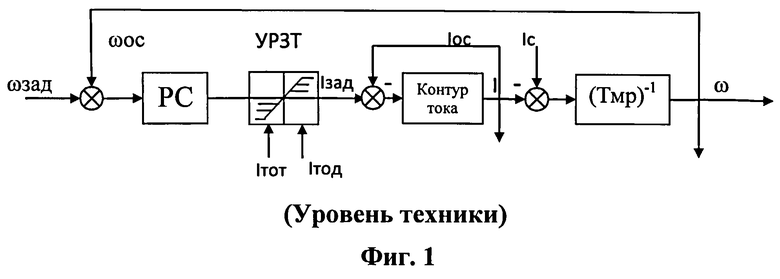
На Фиг.1 представлен пример известного выполнения структуры преобразователя с раздельным заданием уровня токоограничения в двигательном и тормозном режимах, т.е. с раздельным заданием двигательного и тормозного моментов.
Электропривод каждого из ведущих колес содержит регулятор скорости (PC) (обычно пропорционально-интегральный регулятор), узел раздельного задания величины токоограничения (УРЗТ) в тормозном (Iтот) и двигательном (Iтод) режимах; контур тока (КТ), содержащий усилитель мощности (не показан); и электромеханическое звено электропривода с электромеханической постоянной времени Тм; причем на вход регулятора скорости поступает разность сигнала задания и сигнала обратной связи по скорости ωзад и ωос; выход регулятора скорости подключен ко входу УРЗТ, на другие входы которого поступают сигналы задания Iтот и Iтод; выход УРЗТ, формирующий сигнал текущего задания тока Iзад оси за вычетом сигнала обратной связи по току Iос, поступает на вход контура тока, выход которого, представляющий собой ток электропривода, поступает вместе со статическим током Ic (мерой момента статического сопротивления электропривода) на вход электромеханического звена, выход которого представляет собой угловую скорость электропривода ω.
В замкнутой по скорости системе (контуре скорости) в установившемся режиме ток привода определен частью общего момента сопротивления, приходящегося на данное колесо.
При нейтральном положении руля плоскости вращения колес, приводимых в движение электромоторами, то есть мотор-колес (МК), должны быть параллельны продольной оси МЭТС (многодвигательное электротранспортное средство) и оси движения. Коэффициенты трения шин при боковом сдвиге значительно (в 5-10 раз) больше коэффициентов трения качения. Это способствует самовыравниванию направления движения и угловых скоростей. При небольшом различии скоростей мотор-колес возникает момент, стремящийся повернуть многодвигательное электротранспортное средство. Но при отсутствии проскальзывания колеса связаны через дорожное полотно и это сопровождается боковым сдвигом мотор-колес, которому противодействуют возникающие силы, препятствующие боковому скольжению и развороту. При этом скорости мотор-колес принудительно выровнены.
Однако при этом может возникнуть нежелательное неравенство вращающих моментов и токов мотор-колес. Такое же неравенство может возникнуть из-за разброса параметров двигателей, неидентичности поверхностей дороги для разных мотор-колес, из-за неточного задания скорости, перераспределения нагрузки на оси или изменения параметров механической части. Неравномерное распределение нагрузки электроприводов может быть вызвано разницей нормальной составляющей нагрузки на колеса, как статической - вследствие несимметричной загрузки транспортного средства, так и динамической - по осям при разгоне и торможении и по сторонам - при повороте. Примером изменения параметров механической части может послужить изменение радиуса колеса, который зависит от ряда различных факторов: давления в шине, нормальной составляющей нагрузки на колесе, величины передаваемого крутящего момента, температуры и др. Экспериментально установлена зависимость фактического радиуса Rк от подводимого к колесу крутящего момента Мк. В источнике В.А.Патрушов "Автомобили и Автопоезда" (Новые технологии исследования сопротивлений качения и воздуха. 351 с. М.: «Торус ПРЕСС», 2008.) приведена экспериментальная линейная зависимость радиуса колеса от величины передаваемого момента, при разгоне радиус уменьшается, при торможении увеличивается.
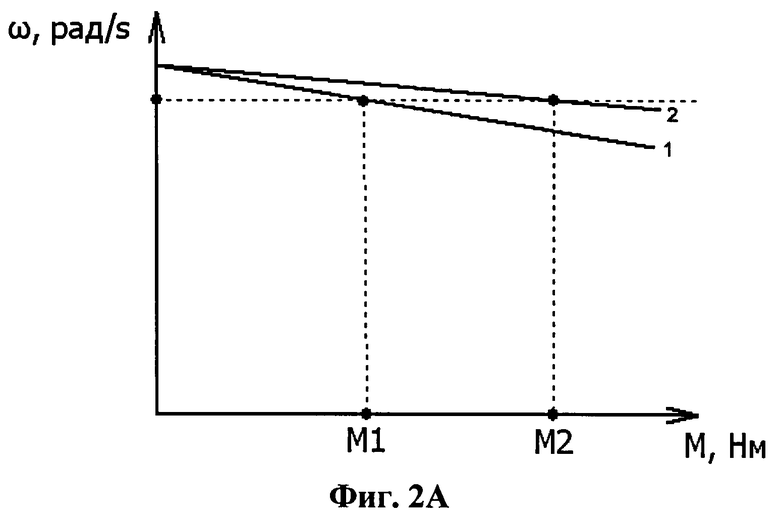
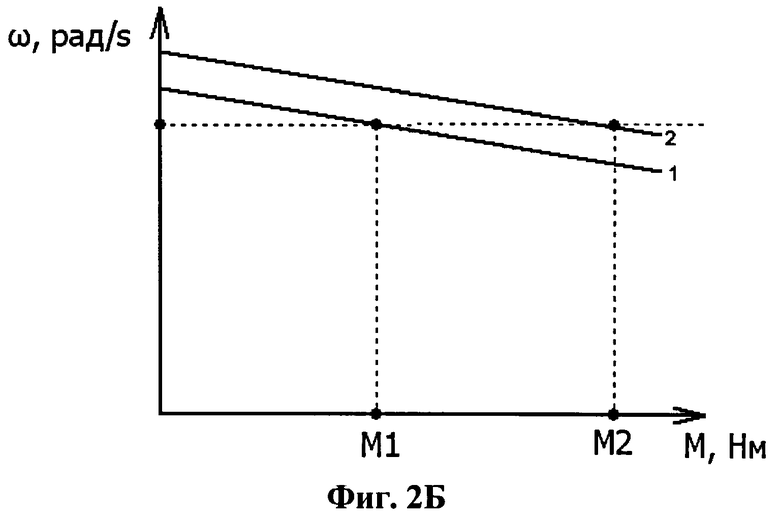
При статических характеристиках электроприводов, замкнутых по скорости (в контуре скорости), распределение нагрузки происходит прямо пропорционально жесткости механических характеристик: чем жестче механическая характеристика, тем большую часть нагрузки берет на себя электропривод (Фиг.2А). При наличии погрешностей задания и одинаковых механических характеристиках большую нагрузку берет на себя электропривод с большей величиной задания по скорости (Фиг.2Б).
В МЭТС при отсутствии проскальзывания колеса связаны через дорожное полотно равенством линейных скоростей (при прямолинейном движении). Вместе с тем координатой обратной связи по скорости в электроприводе является угловая частота вращения колеса. Коэффициент связи между этими величинами (угловой частотой вращения и линейной скоростью точки поверхности шины) является радиусом колеса, который, как сказано выше, зависит от давления в шине, нормальной составляющей нагрузки на колесе, величины передаваемого момента, температуры и др.
Изменение указанного коэффициента (радиуса) при одинаковом задании по скорости приведет к смещению электромеханической характеристики (Фиг.2Б) и перераспределению нагрузки. Длительное неравенство токов двигателей может привести к перегреву одного мотор-колеса за счет недогрузки другого.
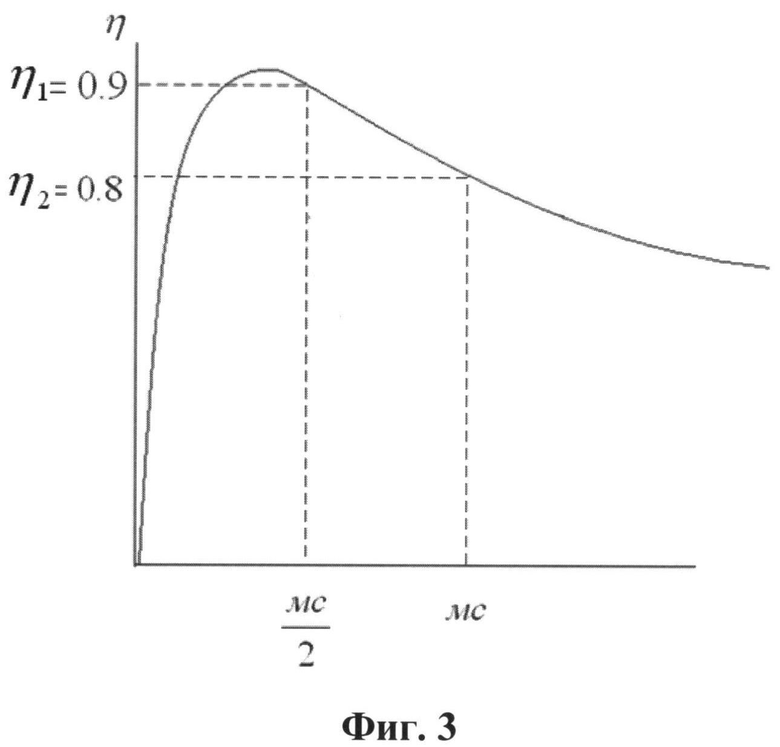
Оценка влияния неравномерного распределения нагрузки по колесам на уровень потерь в системе электрооборудования МЭТС может быть осуществлена на примере ЭТС с двумя ведущими колесами. При равномерном распределении нагрузки M1=М2=Мс/2, при предельно неравномерном распределении нагрузки M1=0; М2=Mc, где:
M1 и М2 - моменты МК;
Mc - суммарный момент сопротивления МЭТС.
На Фиг.3 приведена типичная кривая зависимости КПД (η) электропривода от развиваемого момента при постоянной угловой скорости ω. В первом случае уровень потерь в системе Рпот1=2×ω×(Мс/2)×(1-η1)/η1; во втором случае уровень потерь в системе Рпот2=ω×Мс×(1-η2)/η2.
В нашем примере: Рпот1=0,11×ω×Мс; Рпот2=0,25×ω×Мс, т.е. во втором случае, при предельно неравномерном распределении нагрузки потери в системе более чем в два раза больше, и это без учета дополнительных потерь от заворачивающего момента, возникающего во втором случае.
В некоторых случаях может возникнуть необходимость в ином, не равномерном распределении нагрузки в связи с изменением уклона дороги, качества опорной поверхности, режима движения и т.п. (А.М.Сайкин, И.А.Плиев, Г.В.Коршунов, А.В.Архипов. Об оптимизации распределения мощности по осям и колесам полноприводных автомобилей в зависимости от дорожных условий. Журнал автомобильных инженеров №3 (68) 2011 с.34-37).
Наиболее близким по технической сущности к данному изобретению является "Электротранспортное средство", раскрытое в патенте РФ 2413 635. Известное устройство представляет собой многодвигательное электротранспортное средство, содержащее автономный источник питания или связанное с внешним источником питания; рекуператор энергии; орган задания скорости (момента) движения (педаль газа); орган задания момента торможения (педаль тормоза); переключатель выбора режима движения (вперед, назад, стоп, свободный ход); два или четыре приводных электродвигателя, связанные соответственно с двумя или четырьмя ведущими колесами транспортного средства через механическую передачу или без нее; два или четыре реверсивных преобразователя для регулирования скорости (момента) приводных электродвигателей; датчик поворота руля и систему управления верхнего уровня (СУВУ), причем упомянутые органы задания моментов движения и торможения и переключатель выбора режима подключены к входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня ограничения тока в двигательном и тормозном режимах, т.е. с раздельным заданием двигательного и тормозного моментов; кроме того, ко входам СУВУ подключены также выходы реверсивных преобразователей, несущие информацию о токе и скорости приводных электродвигателей, и СУВУ осуществляет формирование задания скорости (момента) приводных электродвигателей с учетом положения руля и педалей газа и тормоза.
Недостатком известного решения является возможность неравномерной загрузки ведущих колес и невозможность обеспечить требуемое распределение нагрузки в контуре скорости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является повышение (улучшение) эксплуатационных характеристик многодвигательного электротранспортного средства, таких как маневренность, управляемость, устойчивость, комфортность управления, экономичность регулирования. Указанные цели достигаются электротранспортным средством, выполненным в соответствии с настоящим изобретением, и способом его управления.
В соответствии с настоящим изобретением предлагается многодвигательное электротранспортное средство, содержащее автономный источник питания или связанное с внешним источником питания; рекуператор энергии; орган задания скорости и момента движения; орган задания момента торможения; переключатель выбора режима движения; два или четыре приводных электродвигателя, связанных соответственно с двумя или четырьмя колесами транспортного средства; два или четыре реверсивных преобразователя для регулирования скорости и момента приводных электродвигателей и систему управления верхнего уровня (СУВУ), причем упомянутые органы задания момента и скорости движения и момента торможения и переключатель выбора режима движения подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня токоограничения в двигательном и тормозном режимах; отличающееся тем, что оно дополнительно содержит датчики тока потребления реверсивных преобразователей и систему распределения нагрузки (СРН), причем ко входам СРН подключены выходы реверсивных преобразователей, несущие информацию о токе приводных электродвигателей, выходы датчиков тока, несущие информацию о токе потребления реверсивных преобразователей от источника питания, и на входы СРН поступают сигналы задания коэффициентов требуемого распределения нагрузки между ведущими колесами, причем выходы СРН подключены ко входам задания скорости реверсивных преобразователей.
Кроме того, ко входам СУВУ дополнительно могут быть подключены выходы реверсивных преобразователей, несущие информацию о токе и скорости приводных электродвигателей, причем СУВУ выполнено с возможностью формирования задания скорости и момента приводных электродвигателей с учетом положения органа задания скорости и момента движения и органа задания момента торможения.
Система распределения нагрузки (СРН) может содержать входной сумматор, соединенный с выходами реверсивных преобразователей, несущими информацию о токе приводных электродвигателей, причем выход входного сумматора соединен с общей точкой узлов задания коэффициентов требуемого распределения моментов ведущих колес через делитель на число ведущих колес, и выходные сумматоры, причем к прямым входам выходных сумматоров подключены выходы узлов задания коэффициентов требуемого распределения моментов ведущих колес, а к инверсным входам выходных сумматоров подключены выходы реверсивных преобразователей, несущие информацию о токе приводных электродвигателей, причем выходы указанных выходных сумматоров подключены ко входам задания скорости реверсивных преобразователей через звено связи.
В другом варианте выполнения изобретения система распределения нагрузки (СРН) может содержать входной сумматор, соединенный с выходами датчиков тока, несущими информацию о токе потребления реверсивных преобразователей, причем выход входного сумматора соединен с общей точкой узлов задания коэффициентов требуемого распределения мощностей ведущих колес через делитель на число ведущих колес, и выходные сумматоры, причем к прямым входам выходных сумматоров подключены выходы узлов задания коэффициентов требуемого распределения моментов ведущих колес, а к инверсным входам выходных сумматоров подключены выходы датчиков тока, несущие информацию о токе потребления реверсивных преобразователей, причем выходы указанных выходных сумматоров подключены ко входам задания скорости реверсивных преобразователей через звено связи.
Способ управления многодвигательным электротранспортным средством в соответствии с одним вариантом осуществления настоящего изобретения, соответствующим первому из вариантов выполнения СРН, включает определение среднего тока нагрузки путем сложения сигналов, пропорциональных токам электроприводов колес, и деления полученной суммы на число ведущих колес; определение величины отклонения текущего тока привода путем вычитания из величины среднего тока нагрузки, умноженного на коэффициент требуемого распределения моментов ведущих колес, значения текущего тока привода;
формирование сигнала корректировки задания скорости, обеспечивающего требуемое распределение моментов ведущих колес, через звено связи на основании полученной величины отклонения текущего тока привода.
Способ управления многодвигательным электротранспортным средством в соответствии с другим вариантом выполнения СРН включает определение среднего тока потребления путем сложения сигналов, пропорциональных токам потребления приводов, и деления полученной суммы на число ведущих колес; определение величины отклонения текущего тока потребления привода путем вычитания из величины среднего тока потребления, умноженного на коэффициент требуемого распределения мощностей ведущих колес, значения текущего тока потребления привода; формирование сигнала корректировки задания скорости, обеспечивающего требуемое распределение мощностей ведущих колес, через звено связи на основании полученной величины отклонения текущего тока потребления привода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие особенности и преимущества настоящего изобретения будут ясны из его последующего описания и чертежей, на которых показаны:
на Фиг.1 показана структурная схема преобразователя с раздельным заданием уровней токоограничения, известного из уровня техники;
на Фиг.2А показано распределение нагрузки при статических характеристиках электроприводов, замкнутых по скорости;
на Фиг.2Б показано распределение нагрузки при наличии погрешностей задания и одинаковых механических характеристиках;
на Фиг.3 показана примерная кривая зависимости КПД привода от момента при постоянной скорости;
на Фиг.4 показана структурная схема многодвигательного электротранспортного средства в соответствии с настоящим изобретением;
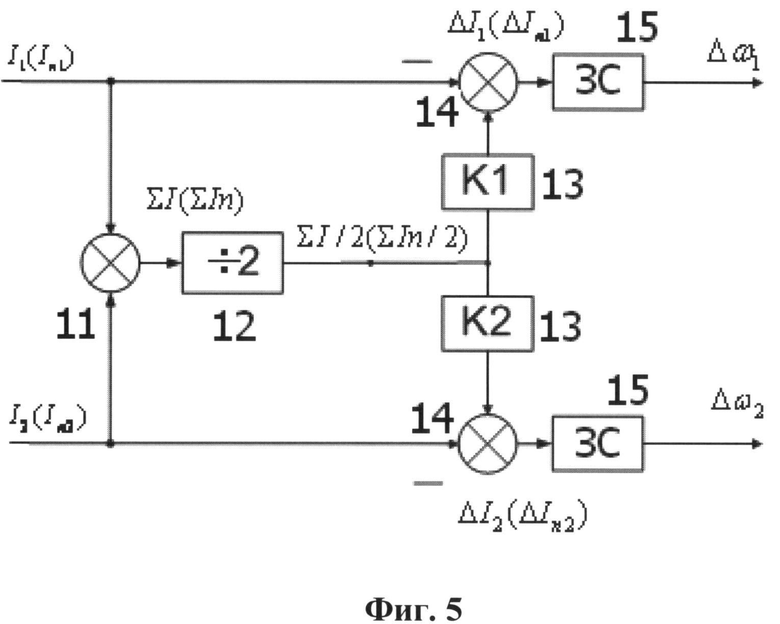
на Фиг.5 показана структурная схема системы распределения нагрузки в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Распределение (например, выравнивание) токов мотор-колес может быть осуществлено путем опускания электромеханической характеристики более нагруженного привода и подъема характеристики менее нагруженного (Фиг.2Б). При этом для обеспечения устойчивости системы должны быть соблюдены условия:
M1+M2=const;
I1×Cm1+I2×Cm2=I1'×Cm1+I2'×Cm2, где:
I1 и I2 - токи мотор-колес коррекции;
I1' и I2'- токи мотор-колес после коррекции;
Cm1 и Cm2 - коэффициенты моментов мотор-колес.
Опускание и подъем электромеханических характеристик достигается путем соответствующего изменения сигналов задания скорости мотор-колес.
На Фиг.4 представлена структурная схема многодвигательного электротранспортного средства в соответствии с настоящим изобретением. Многодвигательное электротранспортное средство содержит автономный источник питания 1, рекуператор 2 энергии, педаль 3 газа (орган задания скорости и момента движения), педаль 4 тормоза (орган задания момента торможения) и переключатель 5 выбора режима движения, который выполнен с возможностью переключения режимов движения "вперед", "назад", "стоп" и "свободный ход". Электротранспортное средство может быть также выполнено связанным с внешним источником питания.
Электротранспортное средство может содержать два или четыре приводных электродвигателя, соединенных соответственно с двумя или четырьмя колесами транспортного средства через механическую передачу или без нее, а также соответственно два или четыре реверсивных преобразователя для регулирования скорости и момента приводных электродвигателей.
Как показано на Фиг.4, электротранспортное средство содержит четыре мотор-колеса 7, то есть четыре приводных электродвигателя, соединенных с четырьмя колесами транспортного средства, и четыре реверсивных преобразователя 6 для регулирования скорости и момента приводных электродвигателей. Электротранспортное средство также содержит систему 8 управления верхнего уровня (СУВУ), ко входам которой подключены педаль 3 газа, педаль 4 тормоза и переключатель 5 выбора режима движения. Выходы СУВУ 8 подключены к управляющим входам реверсивных преобразователей 6, которые выполнены обратимыми, с раздельным заданием уровня токоограничения в двигательном и тормозном режимах, т.е. с раздельным заданием двигательного и тормозного моментов. Ко входам СУВУ 8 подключены также выходы реверсивных преобразователей 6, несущие информацию о токе и скорости приводных электродвигателей, и СУВУ 8 осуществляет формирование задания скорости и момента приводных электродвигателей с учетом положения педалей газа и тормоза.
В электротранспортном средстве предусмотрены датчики тока потребления реверсивных преобразователей 6 и система 9 распределения нагрузки (СРН). Выходы реверсивных преобразователей 6, несущие информацию о токе приводных электродвигателей, выходы датчиков 10 тока, несущие информацию о токе потребления реверсивных преобразователей 6 от источника 1 питания подключены ко входам СРН 9, а выходы СРН 9 подключены к входам задания скорости реверсивных преобразователей 6. При этом на входы СРН 9 поступают сигналы задания коэффициентов требуемого распределения нагрузки между колесами.
Рассмотрим далее предложенное решение на примере электротранспортного средства с двумя ведущими колесами. На Фиг.5 показана структурная схема системы 9 распределения нагрузки.
Способ управления электротранспортным средством, содержащим показанную на Фиг.5 систему распределения нагрузки, включает определение среднего тока нагрузки ΣI/2 (или среднего тока потребления приводов ΣIn/2) путем сложения сигналов, пропорциональных токам электроприводов колес Ii (или токам потребления приводов ΣI(ΣIn), входным сумматором 11 и деления полученной суммы ΣI(ΣIn) на число ведущих колес делителем 12. В узлах 13 задания коэффициентов требуемого распределения моментов (мощностей) ведущих колес осуществляют умножение величины среднего тока на коэффициент требуемого распределения моментов (мощностей) ведущих колес. Затем определяют величину отклонения текущего тока привода ΔIi (текущего тока потребления привода ΔIni) вычитанием выходными сумматорами 14 значения текущего тока привода (текущего тока потребления привода ΔIni) из величины среднего тока, умноженного на коэффициент требуемого распределения моментов (мощностей) ведущих колес. Полученная величина отклонения текущего тока привода ΔIi (текущего тока потребления привода ΔIni) через звено связи ЗС 15 формирует сигнал корректировки задания скорости Δωi, обеспечивающий требуемое распределение моментов (мощностей) ведущих колес. Вид (пропорциональный или пропорционально-интегральный) и параметры ЗС определены уровнем требований к точности и быстродействию системы распределения нагрузки.
Рассмотрим работу СРН при равных коэффициентах (К1=К2=1) и входных сигналах, пропорциональных току (моменту) реверсивных преобразователей. При появлении разности загрузки электроприводов мотор-колес, обусловленной неравномерностью нагрузки колес вследствие неодинаковости статической или динамической нагрузки, разностью давлений в шинах и т.п. СРН соответствующим образом корректирует величину задания скорости каждого электропривода и таким образом способствует выравниванию загрузки осей. При повороте МЭТС вследствие поворота рулевого колеса и изменения скоростей колес в соответствии с геометрией шасси происходит следующее:
- скорость наружного (внешнего) колеса увеличивается, скорость внутреннего (с меньшим радиусом разворота) колеса остается неизменной;
- ток (момент) внешнего колеса уменьшается, ток (момент) внутреннего колеса увеличивается;
- СРН корректирует задание приводов по скорости, увеличивая задание по скорости для внешнего колеса и уменьшая задание по скорости для внутреннего колеса, тем самым выравнивая загрузку мотор-колес и обеспечивая равенство токов (моментов).
Рассмотрим работу СРН при разных коэффициентах (К1=4/3, К2=2/3) и входных сигналах, пропорциональных току (моменту) реверсивных преобразователей. При появлении разности загрузки электроприводов мотор-колес, обусловленной неравномерностью нагрузки колес вследствие неодинаковости статической или динамической нагрузки, разностью давлений в шинах и т.п. СРН соответствующим образом корректирует величину задания скорости каждого электропривода и таким образом обеспечивает распределение токов (моментов) в соотношении 2:1. При повороте МЭТС вследствие поворота рулевого колеса также производят распределение токов (моментов) в соответствии с заданным соотношением.
Сумма коэффициентов распределения должна быть равна числу приводов, корректируемых с помощью СРН.
Рассмотрим работу СРН при равных коэффициентах (К1=К2=1) и входных сигналах, пропорциональных току потребления реверсивных преобразователей. При появлении разности загрузки электроприводов мотор-колес, обусловленной неравномерностью нагрузки колес вследствие неодинаковости статической или динамической нагрузки, разностью давлений в шинах и т.п. СРН соответствующим образом корректирует величину задания скорости каждого электропривода и таким образом способствует выравниванию токов потребления приводов, тем самым обеспечивая равенство мощностей потребления. При близости режимов мотор-колес по скорости можно сделать вывод о близости величин КПД реверсивных преобразователей, а значит, и равенстве развиваемых мотор-колесами мощностей. Аналогичная ситуация наблюдается при повороте МЭТС вследствие поворота рулевого колеса.
Таким образом, предложенное решение МЭТС и способ управления им позволяет отказаться от датчика положения рулевого колеса и автоматически подстраивать скорость колес при повороте с заданным распределением моментов (мощностей).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоосевой преобразователь электропривода | 2016 |
|
RU2667482C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2413635C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО С ЗАРЯДНЫМ УСТРОЙСТВОМ НА БОРТУ | 2012 |
|
RU2486074C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2405686C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2538907C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОМБИНИРОВАННЫМ МУСКУЛЬНЫМ И ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2556051C1 |
Заявленная группа изобретений относится к многодвигательному электротранспортному средству и способам управления этим электротранспортным средством. Электротранспортное средство содержит рекуператор энергии, орган задания скорости и момента движения, орган задания момента торможения, переключатель выбора режима движения, электродвигатели, реверсивные преобразователи, систему управления верхнего уровня (СУВУ), датчики тока потребления реверсивных преобразователей, систему распределения нагрузки (СРН). Входы СРН подключены к выходам реверсивных преобразователей и выходам датчиков тока. На входы СРН поступают сигналы задания коэффициентов требуемого распределения нагрузки между ведущими колесами. Выходы СРН подключены ко входам задания скорости реверсивных преобразователей. Способ управления по первому варианту заключается в определении среднего тока нагрузки и величины отклонения текущего тока привода, формировании сигнала корректировки задания скорости, обеспечивающего требуемое распределение моментов ведущих колес, через звено связи на основании полученной величины отклонения текущего тока привода. Способ управления по второму варианту заключается в определении среднего тока потребления и величины отклонения текущего тока потребления привода, формировании сигнала корректировки задания скорости, обеспечивающего требуемое распределение мощностей ведущих колес, через звено связи на основании полученной величины отклонения текущего тока потребления привода. Технический результат заключается в повышении эксплуатационных характеристик электротранспортного средства. 3 н. и 4 з.п. ф-лы, 6 ил.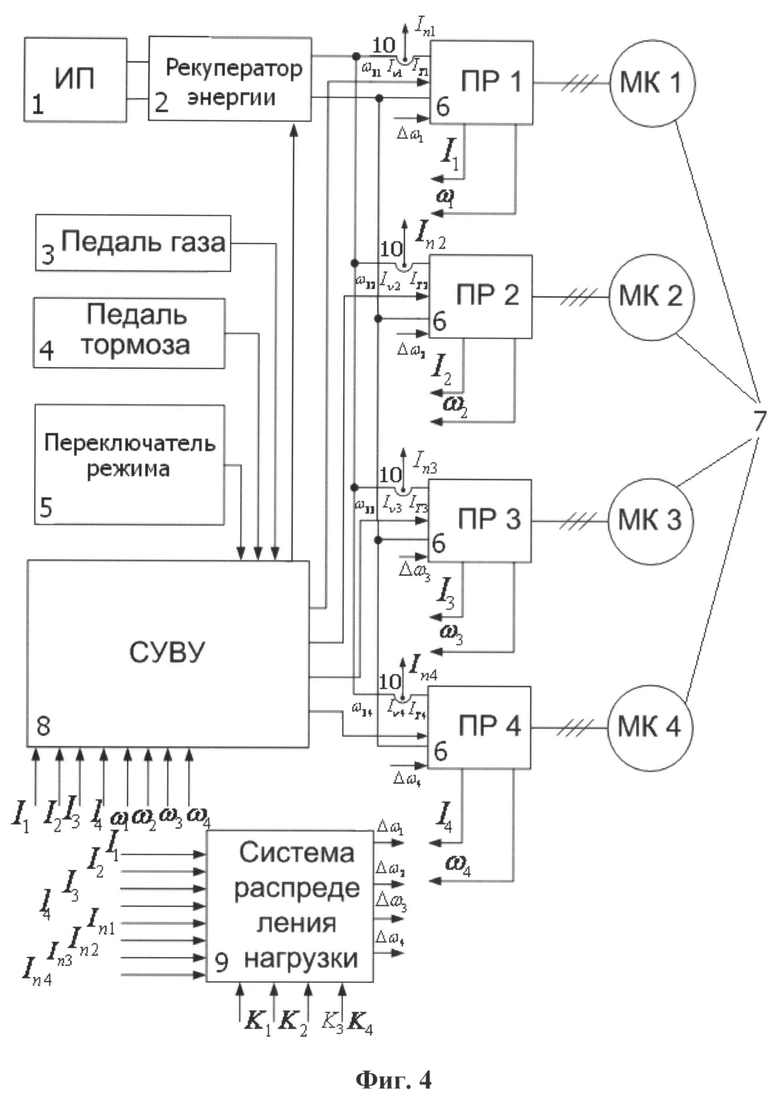
1. Многодвигательное электротранспортное средство, содержащее автономный источник питания или связанное с внешним источником питания, рекуператор энергии, орган задания скорости и момента движения, орган задания момента торможения, переключатель выбора режима движения, два или четыре приводных электродвигателя, связанных соответственно с двумя или четырьмя колесами транспортного средства, два или четыре реверсивных преобразователя для регулирования скорости и момента приводных электродвигателей и систему управления верхнего уровня (СУВУ), причем упомянутые органы задания момента и скорости движения и момента торможения и переключатель выбора режима движения подключены ко входам СУВУ, а выходы СУВУ подключены к управляющим входам реверсивных преобразователей, которые выполнены обратимыми, с раздельным заданием уровня токоограничения в двигательном и тормозном режимах, отличающееся тем, что оно дополнительно содержит датчики тока потребления реверсивных преобразователей и систему распределения нагрузки (СРН), причем ко входам СРН подключены выходы реверсивных преобразователей, несущие информацию о токе приводных электродвигателей, выходы датчиков тока, несущие информацию о токе потребления реверсивных преобразователей от источника питания, причем на входы СРН поступают сигналы задания коэффициентов требуемого распределения нагрузки между ведущими колесами, а выходы СРН подключены ко входам задания скорости реверсивных преобразователей.
2. Многодвигательное электротранспортное средство по п.1, отличающееся тем, что ко входам СУВУ дополнительно подключены выходы реверсивных преобразователей, несущие информацию о токе и скорости приводных электродвигателей, причем СУВУ выполнено с возможностью формирования задания скорости и момента приводных электродвигателей с учетом положения органа задания скорости и момента движения и органа задания момента торможения.
3. Многодвигательное электротранспортное средство по любому из пп.1 или 2, отличающееся тем, что сумма коэффициентов требуемого распределения нагрузки между ведущими колесами равна числу ведущих колес.
4. Многодвигательное электротранспортное средство по п.3, отличающееся тем, что СРН содержит входной сумматор, соединенный с выходами реверсивных преобразователей, несущими информацию о токе приводных электродвигателей, причем выход входного сумматора соединен с общей точкой узлов задания коэффициентов требуемого распределения моментов ведущих колес через делитель на число ведущих колес, и выходные сумматоры, причем к прямым входам выходных сумматоров подключены выходы узлов задания коэффициентов требуемого распределения моментов ведущих колес, а к инверсным входам выходных сумматоров подключены выходы реверсивных преобразователей, несущие информацию о токе приводных электродвигателей, причем выходы указанных выходных сумматоров подключены ко входам задания скорости реверсивных преобразователей через звено связи.
5. Многодвигательное электротранспортное средство по п.3, отличающееся тем, что СРН содержит входной сумматор, соединенный с выходами датчиков тока, несущими информацию о токе потребления реверсивных преобразователей, причем выход входного сумматора соединен с общей точкой узлов задания коэффициентов требуемого распределения мощностей ведущих колес через делитель на число ведущих колес, и выходные сумматоры, причем к прямым входам выходных сумматоров подключены выходы узлов задания коэффициентов требуемого распределения моментов ведущих колес, а к инверсным входам выходных сумматоров подключены выходы датчиков тока, несущие информацию о токе потребления реверсивных преобразователей, причем выходы указанных выходных сумматоров подключены ко входам задания скорости реверсивных преобразователей через звено связи.
6. Способ управления многодвигательным электротранспортным средством по п.4, включающий определение среднего тока нагрузки путем сложения сигналов, пропорциональных токам электроприводов колес, и деления полученной суммы на число ведущих колес, определение величины отклонения текущего тока привода путем вычитания из величины среднего тока нагрузки, умноженного на коэффициент требуемого распределения моментов ведущих колес, значения текущего тока привода, формирование сигнала корректировки задания скорости, обеспечивающего требуемое распределение моментов ведущих колес, через звено связи на основании полученной величины отклонения текущего тока привода.
7. Способ управления многодвигательным электротранспортным средством по п.5, включающий определение среднего тока потребления путем сложения сигналов, пропорциональных токам потребления приводов, и деления полученной суммы на число ведущих колес, определение величины отклонения текущего тока потребления привода путем вычитания из величины среднего тока потребления, умноженного на коэффициент требуемого распределения мощностей ведущих колес, значения текущего тока потребления привода, формирование сигнала корректировки задания скорости, обеспечивающего требуемое распределение мощностей ведущих колес, через звено связи на основании полученной величины отклонения текущего тока потребления привода.
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2413635C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| RU 2060173 C1, 20.05.1996 | |||
| US 6580874 B1,17.06.2003 | |||

