Решение относится к системам управления многодвигательным электроприводом многосекционных агрегатов и может быть использовано в многодвигательных взаимосвязанных электроприводах постоянного и переменного тока агрегатов по обработке полосовых материалов, например бумагоделательных машин, прокатных станов, линий по производству стекла, пленок, полимерных материалов, агрегатов непрерывного лужения. Для них характерно в соответствии с требованиями технологии последовательное расположение рабочих механизмов, связанных между собой обрабатываемым материалом. Несмотря на многообразие технологических процессов, конструкций машин и физико-механических свойств обрабатываемых материалов, в требованиях к системам электроприводов этих линий много общего. Когда требуется точность регулирования параметров объекта порядка 0,01-0,1%, используются цифровые или цифроаналоговые системы электропривода.
Известно устройство для регулирования натяжения длинномерного материала (авторское свидетельство СССР №1416421, В65Н 77/00, опубл. 15.08.1988). Устройство может быть использовано в текстильной и бумагоделательной промышленности.
Устройство для регулирования натяжения длинномерного материала содержит расположенные последовательно две секции транспортировки материала, каждая из которых состоит из электродвигателя, имеющего датчик скорости, выходом подключенный к первому входу системы регулирования скорости электродвигателя, имеющего датчик скорости, выходом подключенный к первому входу системы регулирования скорости электродвигателя, вторым входом соединенной с выходом регулятора натяжения материала, датчика натяжения материала, выходом связанного с первым входом регулятора натяжения материала, и блока ограничения регулирующего воздействия, выходом соединенного со вторым входом регулятора натяжения материала, а информационным входом - с выходом регулятора натяжения материала. Натяжение регулируется за счет разности скоростей секций. Отсутствует механический измеритель натяжения. Нет устройства перераспределения скоростей. Использована полностью аналоговая система. Все это снижает точность регулирования.
Известен многодвигательный электропривод бумагоделательной машины (патент РФ №2203997, D21F 7/02, опубл. 2003.05.10), который может быть использован во взаимосвязанных приводах постоянного и переменного тока агрегатов по перемещению полосовых материалов. Электропривод содержит электродвигатели секций, подключенные к преобразователям и снабженные датчиками частоты, выходы которых подключены к первым входам сумматоров, а выходы сумматоров подключены к управляющим входам преобразователей. Он также содержит дифференциальную зубчатую передачу по числу электродвигателей, при этом входные валы зубчатых дифференциальных передач присоединены к электродвигателям секции, выходные валы - к валам рабочего механизма, опорные валы - к регулирующим электрическим машинам, которые подключены к дополнительным преобразователям, микропроцессорное устройство, одни из выходов которого подключены ко вторым входам сумматоров, другие - к входам дополнительных преобразователей, измерители нагрузки, включенные в цепи статоров регулирующих электрических машин, причем выходы измерителей нагрузки соединены с первыми входами вторых сумматоров, вторые входы которых подключены к одним из выходов микропроцессорного устройства, а выходы вторых сумматоров присоединены к нелинейным блокам, выходы которых подключены к двум дополнительным преобразователям соседних секций.
Недостатком известного электропривода и системы управления им является сложность исполнения узлов передачи движения к рабочим механизмам через дифференциальную зубчатую передачу, входной вал от электродвигателя, подключенного к преобразователям и снабженного датчиком скорости, входной вал, опорный вал, подключенный к регулирующей электрической машине. Таким образом, на один вал работают два двигателя и два преобразователя. Судя по структуре, использованы кодовые датчики, которые недостаточно надежны.
В качестве прототипа принята система управления многодвигательным электроприводом многосекционных агрегатов (патент РФ №2386740, D21F 7/02, опубл. 20.04.2010), содержащая приводы секции управлением от микропроцессорного устройства, включающие электродвигатели, выходные валы которых подключены к передачам рабочих механизмов, а на входе установлены силовые преобразователи, введены также датчики скорости, сумматоры, в приводе установлен цифровой регулятор скорости, включающий цифровой сумматор и вычитающий счетчик для обработки импульсных сигналов от импульсных датчиков скорости, установленных на валах передач первой и второй секции, выход цифрового регулятора скорости подключен к входу силового преобразователя, к первому входу цифрового регулятора скорости подключен выход перемножителя, к первому входу которого через первый преобразователь частота-код подключен выход импульсного датчика скорости привода первой секции, к второму входу цифрового регулятора скорости - выход второго преобразователя частота-код, к входу которого подключен выход импульсного датчика скорости привода второй секции, к третьему входу цифрового регулятора скорости - выход преобразователя код-частота, вход которого подключен к выходу перемножителя, к четвертому входу цифрового регулятора скорости - выход импульсного датчика скорости, установленного на валу привода второй секции, установлен регулятор натяжения материала, к входу которого подключен выход первого сумматора, к входам последнего - выход датчика тока и выход задания натяжения материала от микропроцессорного устройства, выход регулятора натяжения материала подключен к одному входу второго сумматора, к его другому входу - выход задания коэффициента редукции между скоростями соседних секций от микропроцессорного устройства, а к выходу - второй вход перемножителя.
Эта система имеет следующий недостаток: не обеспечивается стабильность работы системы второго привода при изменяющихся параметрах объекта.
Эти недостатки устраняются предлагаемым решением.
Решаемая задача - совершенствование системы управления многодвигательным электроприводом многосекционного агрегата непрерывного действия.
Технический результат - повышение точности регулирования и стабильности работы системы второго привода (его точной синхронизации) при изменяющихся параметрах второго привода.
Этот технический результат достигается тем, что в систему управления многодвигательным электроприводом многосекционных агрегатов, содержащую приводы секций с управлением от микропроцессорного устройства, включающие электродвигатели, выходные валы которых подключены к передачам рабочих механизмов, а на входе установлены силовые преобразователи, датчики скорости, сумматоры, в приводе установлен регулятор скорости, выход регулятора скорости подключен к входу силового преобразователя, к первому входу цифрового регулятора скорости подключен выход перемножителя, к первому входу которого через первый преобразователь частота-код подключен выход импульсного датчика скорости привода первой секции, к второму входу регулятора скорости - выход второго преобразователя частота-код, к входу которого подключен выход импульсного датчика скорости привода второй секции, установлен регулятор натяжения материала, к входу которого подключен выход первого сумматора, к входам последнего - выход датчика тока и выход задания натяжения материала от микропроцессорного устройства, выход регулятора натяжения подключен к одному входу второго сумматора, к его другому входу - выход задания коэффициента редукции между скоростями соседних секций от микропроцессорного устройства, а к выходу - второй вход перемножителя, введены: эталонная модель, реверсивный счетчик, преобразователь код-частота и два узла суммирования, при этом эталонная модель через преобразователь код-частота подключена к суммирующему входу счетчика и к первому входу первого сумматора, к вычитающему входу счетчика подключен выход импульсного датчика скорости, установленного на валу второй секции, этот же выход через преобразователь частота-код подключен к второму входу первого сумматора, выход которого и выход счетчика подключены на входы второго сумматора, выход которого подключен к третьему выходу регулятора скорости. Может быть использован либо цифровой, либо аналоговый регулятор скорости с установленными на его входах цифро-аналоговыми преобразователями.
Обоснование технического результата.
Эталонная модель в данном случае представляет собой цифровой фильтр второго порядка, настроенный на модульный оптимум. Ее введение обеспечивает стабильность работы системы второго привода за счет подачи на вход цифрового регулятора скорости дополнительного сигнала, пропорционального отклонению сигнала по скорости второго привода от эталонного сигнала и интеграла отклонения этих сигналов. Дополнительный сигнал на входе цифрового регулятора скорости стремится устранить отклонение действительного сигнала по скорости второго привода от эталонного сигнала.
Пропорциональная часть регулирования ошибки отклонения от эталонной модели вводится, чтобы не изменять вид частотных характеристик привода в районе частоты среза, т.е. сохранять быстродействие и устойчивость исходной системы привода.
Цифровая интегральная составляющая регулирования ошибки отклонения от эталонной модели обеспечивает отсутствие ошибки регулирования скорости в установившемся режиме, т.е. обеспечивает точную синхронизацию скорости ведущего и ведомого приводов.
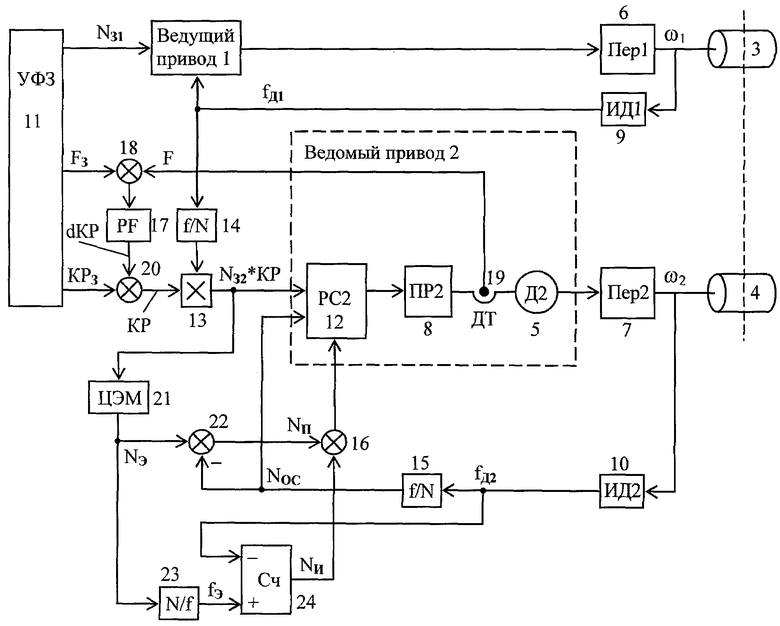
Предлагаемая система управления приведена на чертеже для двух секций. Эти схемы аналогичны и их может быть несколько в зависимости от количества секций.
Система содержит приводы 1, 2, первый из которых является ведущим, а второй - ведомым. Система управляет работой механизмов 3, 4 (это могут быть валы бумагоделательной машины, прокатного стана, агрегата производства полимерных материалов и т.п.). Приводы 1, 2 включают электродвигатели 5, выходные валы которых подключены к механическим передачам 6, 7 рабочих механизмов 3, 4. На входе электродвигателей установлены силовые преобразователи 8, на выходных валах передач 6, 7 - импульсные датчики 9, 10 скорости вращения рабочих механизмов 3, 4. Приводы 1, 2 управляются микропроцессорным устройством 11, формирующим задающие сигналы. В каждом приводе на входе силового преобразователя 8 установлен цифровой или аналоговый регулятор скорости 12 (PC).
Выход PC 12 подключен к входу силового преобразователя 8. К первому входу PC 12 подключен выход перемножителя 13, к первому входу которого через первый преобразователь частота-код 14 подключен выход импульсного датчика 9 скорости привода первой секции. Ко второму входу PC 12 подключен выход второго преобразователя частота-код 15, к входу которого подключен выход импульсного датчика 10 скорости привода второй секции. К третьему входу PC 12 подключен выход сумматора 16. Установлен регулятор 17 натяжения материала, к входу которого подключен выход первого сумматора 18, к входам последнего - выход датчика тока 19 электродвигателя 5 и выход задания натяжения материала от микропроцессорного устройства 11. Выход регулятора 17 натяжения материала подключен к одному входу второго сумматора 20, к его другому входу - выход задания коэффициента редукции между скоростями первого и второго приводов от микропроцессорного устройства 11, а к выходу - второй вход перемножителя 13.
Выход перемножителя 13 подключен к входу цифровой эталонной модели 21, один выход которой подключен к первому входу сумматора 22, а другой выход через преобразователь код-частота 23 подключен к суммирующему входу счетчика 24, к вычитающему входу которого подключен выход импульсного датчика 10 скорости привода второй секции. Сигнал этого же импульсного датчика 10 через преобразователь частота-код 15 подключен к второму входу сумматора 22, выход которого, а также выход счетчика-интегратора 24 подключены к входам сумматора 16, выход которого подключен к третьему входу цифрового регулятора скорости 12.
Система работает следующим образом.
Сигнал задания скорости для 2-й секции берется от импульсного датчика 9, установленного в 1-й секции. Этот частотный сигнал fд1 преобразуется в цифровой код задания скорости Nз2 для 2-й секции с помощью преобразователя частота-код (f/N) 14. Это преобразование выполняется с помощью счетчика и таймера путем заполнения счетчика импульсами fд1 в течение времени измерения dT. Код на выходе преобразователя частота-код равен Nз2=fд1*dT. Код задания скорости Nз2 умножается на код коэффициента редукции КР, чтобы задать соотношение скоростей для приводов 1-й и 2-й секций и, следовательно, задать натяжение полосового материала между секциями. Этот код подается на вход ЦЭМ 21, на выходе которой образуется код эталонного сигнала Nэ.
Эталонный сигнал Nэ преобразуется в частоту fэ с помощью преобразователя код-частота (N/f) 23 и подается на суммирующий вход счетчика 24, выполняющего роль интегратора. На вычитающий вход счетчика подается сигнал обратной связи по скорости для 2-й секции, который берется от собственного импульсного датчика 10. Полученная интегральная составляющая ошибки подается на второй вход сумматора 16, где складывается с пропорциональной составляющей ошибки (разностью эталонного кода и кода обратной связи по скорости для второй секции), полученной на сумматоре 22.
Скорость 2-й секции регулируется цифровым регулятором скорости 12. На первый вход регулятора 12 подается код Nз2*КР, из которого вычитается код обратной связи по скорости Nос. Сигнал обратной связи по скорости для 2-й секции берется от собственного импульсного датчика 10. Этот частотный сигнал fд2 преобразуется в цифровой код обратной связи по скорости Noc с помощью преобразователя частота-код (f/N). 15. На третий вход регулятора скорости 12 подается сигнал с выхода сумматора 16.
На вход сумматора 16 подается выходной сигнал Nп сумматора 22 и выходной сигнал Nи счетчика-интегратора 24. Сумматор 22 вычисляет код отклонения скорости от эталонного сигнала Nэ, а счетчик 24 - интеграл отклонения Nи скорости от эталонного сигнала Nэ.
Постоянная интегрирования Tи цифрового интегратора-счетчика: Tи=Nэ макс/fэ макс, где Nэ макс - максимальный объем счетчика; fэ макс - максимальное значение эталонной частоты fэ.
При работе этой системы в установившемся режиме будет достигнуто состояние fэ=fд2. Код ошибки по частоте в установившемся режиме близок к нулю и имеет возможное отклонение ±1 от кода на выходе цифрового регулятора скорости 12 даже при изменении параметров объекта регулирования или при действии возмущающих воздействий.
Код задания коэффициента редукции КРз скоростей формируется микропроцессорным устройством 11. Это же устройство формирует и код задания натяжения Fз. Этот код Fз с помощью цифрового сумматора 18 сравнивается с кодом действительного натяжения F, которое пропорционально сигналу датчика тока 19. Ошибка по натяжению (Fз-F) через регулятор натяжения 17 суммируется с учетом знака с заданным значением коэффициента редукции КРз и эта сумма определяет действующее значение коэффициента редукции КР. Тем самым компенсируется изменение натяжения полосового материала, обеспечивается постоянство его натяжения в процессе перемещения и стабильность движения.
В большинстве практических случаев заданное значение коэффициента редукции КРз не может равняться единице, т.к. различны номинальные скорости вращения приводных двигателей, различны коэффициенты механических передач и различны диаметры приводных валов, перемещающих полосовой материал.
Таким образом, предлагаемая система управления многодвигательным электроприводом обеспечивает требуемый коэффициент редукции между секциями и постоянство натяжения полосового материала при изменяющихся параметрах объекта регулирования и при различных возмущающих воздействиях, что позволяет повысить качество его обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Устройство для стабилизации частоты автономного источника питания | 1977 |
|
SU739703A1 |
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД | 2005 |
|
RU2281902C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
Решение относится к системам управления и может быть использовано в многодвигательных взаимосвязанных электроприводах агрегатов по обработке полосовых материалов, например, бумагоделательных машин, прокатных станов и т.п. Система управления содержит приводы секций с управлением от микропроцессорного устройства, включающие электродвигатели, выходные валы которых подключены к передачам рабочих механизмов, а на входе установлены силовые преобразователи. Введены также датчики скорости, сумматоры, установлен регулятор скорости, выход регулятора скорости подключен к входу силового преобразователя. К первому входу регулятора скорости подключен выход перемножителя. К второму входу регулятора скорости - выход второго преобразователя частота-код. Также установлен регулятор натяжения материала. В систему управления также введены эталонная модель, реверсивный счетчик и два узла суммирования, при этом эталонная модель через преобразователь код-частота подключена к суммирующему входу счетчика и к первому входу первого сумматора, к вычитающему входу счетчика подключен выход импульсного датчика скорости, установленного на валу второй секции, этот же выход через преобразователь частота-код подключен ко второму входу первого сумматора, выход которого и выход счетчика подключен на входы второго сумматора, выход которого подключен к третьему входу регулятора скорости. Предложенное изобретение обеспечивает повышение точности регулирования и стабильности работы системы второго привода при изменяющихся параметрах второго привода. 1 ил.
Система управления многодвигательным электроприводом многосекционных агрегатов, содержащая приводы секций с управлением от микропроцессорного устройства, включающие электродвигатели, выходные валы которых подключены к передачам рабочих механизмов, а на входе установлены силовые преобразователи, введены также датчики скорости, сумматоры, установлен регулятор скорости, выход регулятора скорости подключен к входу силового преобразователя, к первому входу регулятора скорости подключен выход перемножителя, к первому входу которого через первый преобразователь частота-код подключен выход импульсного датчика скорости привода первой секции, к второму входу регулятора скорости - выход второго преобразователя частота-код, к входу которого подключен выход импульсного датчика скорости привода второй секции, установлен регулятор натяжения материала, к входу которого подключен выход первого сумматора, к входам последнего - выход датчика тока и выход задания натяжения материала от микропроцессорного устройства, выход регулятора натяжения материала подключен к одному входу второго сумматора, к его другому входу - выход задания коэффициента редукции между скоростями соседних секций от микропроцессорного устройства, а к выходу - второй вход перемножителя, отличающаяся тем, что в нее введены эталонная модель, реверсивный счетчик и два узла суммирования, при этом эталонная модель через преобразователь код-частота подключена к суммирующему входу счетчика и к первому входу первого сумматора, к вычитающему входу счетчика подключен выход импульсного датчика скорости, установленного на валу второй секции, этот же выход через преобразователь частота-код подключен ко второму входу первого сумматора, выход которого и выход счетчика подключен на входы второго сумматора, выход которого подключен к третьему входу регулятора скорости.
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| JP 57132793 A, 17.08.1982 | |||
| JP 2000158030 A, 13.06.2000 | |||
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |

