Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов.
Известно устройство контроля за управлением поезда, в котором уточнение координаты места нахождения поезда, определяемой с помощью колесного датчика пройденного пути, производят посредством использования бортовых датчиков обнаружения элементов путевой инфраструктуры с заранее известными координатами в электронной карте маршрута, записанными в электронной памяти устройства (WO 0166401, B61L 25/02, 13.09.01). Необходимость уточнения координаты обусловлена тем, что из-за юза и боксования, а также износа бандажа колес накапливается погрешность в измерении пройденного пути с помощью колесного датчика.
Недостатком известного устройства является ненадежная работа в условиях электромагнитных помех. Например, из-за электромагнитных помех может произойти сбой в подсчете порядкового номера очередного металлического элемента крепления рельсов к шпалам, что приводит к потере информации о точной координате поезда до тех пор, пока вихретоковый датчик обнаружения металлических элементов конструкции рельсового пути не окажется над элементом рельсового пути с выраженными индивидуальными характеристиками.
Известно устройство контроля за управлением поезда, в котором уточнение координаты места нахождения поезда, определяемой с помощью колесного датчика пройденного пути, производят на границах блок участков определяемых по смене параметров кодового сигнала, поступающего из рельсовых цепей (RU 2290335, B61L 25/00, 27.12.06).
Недостатком известного устройства является недостаточная безопасность, обусловленная отсутствием передачи оперативной информации о появлении новых препятствий на пути следования поезда.
Наиболее близким к заявляемому устройству является выбранное в качестве прототипа устройство контроля за управлением поезда и бдительностью машиниста, содержащее усилитель электропневматического клапана, выход которого соединен с входом электропневматического клапана, а вход - с выходом безопасной схемы контроля, входы которой соединены с выходами модулей центральной обработки информации, которые первыми портами соединенны между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, а также содержащее два модуля измерения параметров движения, входы которых соединены с модулем датчиков пути и скорости, причем каждый из упомянутых модулей отдельно подключен к межмодульному интерфейсу, два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем АЛСН и АЛС-ЕН, причем каждый из упомянутых модулей отдельно подключен к межмодульному интерфейсу, модуль маршрута, подключенный к межмодульному интерфейсу и соединенный своим портом с портом приемника спутниковой навигации, вход которого соединен с антенной спутниковой навигации, модуль радиоканала, подключенный к межмодульному интерфейсу, и соединенный своим портом с первым портом радиомодема, второй порт которого соединен с радиоантенной. В качестве межмодульного интерфейса взаимодействия в устройстве использован CAN интерфейс (RU 2262459, B61L 25/04, 20.10.05).
В этом устройстве при нормальной работе используют алгоритм с непрерывным контролем скорости и систему АЛС-ЕН с функцией прицельной остановки перед определенной координатой пути. Для определения координаты места нахождения локомотива используют данные от приемника спутниковой навигации и электронной карты маршрута, а для уточнения координаты места нахождения локомотива также используют изменение параметров кодового сигнала на границах соседних рельсовых цепей. Для измерения пройденного пути и скорости движения осуществляют непрерывный контроль скорости, при котором используют данные от приемника спутниковой навигации и электронной карты маршрута. В качестве резервного алгоритма используется алгоритм со ступенчатым контролем скорости, подобный тому, что используется в АЛСН числового кода. При работе по этому алгоритму для измерения пройденного пути и скорости движения используют модуль датчиков пути и скорости, связанный с колесами локомотива и вырабатывающий за каждый оборот колеса определенное постоянное число электрических импульсов.
Известное устройство не обеспечивает требуемую безопасность, поскольку в памяти модуля маршрута находится электронная карта маршрута, обновляемая перед каждой поездкой, но не учитывающая оперативное изменение обстановки по препятствиям на пути движения.
Технический результат изобретения заключается в повышении безопасности движения.
Технический результат достигается тем, что в устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, согласно изобретению введен блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу.
На чертеже представлена структурная схема устройства контроля за управлением поезда и бдительностью машиниста.
Устройство контроля за управлением поезда и бдительностью машиниста содержит блок 1 контроля безопасности, соединенный через усилитель 2 с входом электропневматического клапана 3, входы блока 1 контроля безопасности соединены с выходами модулей (4 и 5) центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу 6, к которому подключены два модуля (7 и 8) измерения параметров движения и два модуля (9 и 10) непрерывных каналов внешних устройств, входы которых соединены с блоком 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей (7 и 8) измерения параметров движения соединены с модулем 12 датчиков пути и скорости, подключенные к межмодульному интерфейсу 6 модуль 13 маршрута и модуль 14 радиоканала, которые своими портами соединены соответственно с портом приемника 15 спутниковой навигации, к входу которого подключена антенна 16 спутниковой навигации, и с портом радиомодема 17, соединенного с радиоантенной 18, блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу 6.
Устройство контроля за управлением поезда и бдительностью машиниста работает следующим образом.
Перед каждой поездкой локомотива в память модуля 13 маршрута записывают электронную карту маршрута, которая позволяет совместно с данными о текущих кординатах местонахождения поезда, поступающими от приемника 15 спутниковой навигации, рассчитать параметры режимов ведения поезда в каждой точке маршрута движения.
Параллельно с рассчетами скорости движения и местонахождения поезда, по данным от модуля 13 маршрута и приемника 15 спутниковой навигации, для уменьшения влияния условий по приему сигналов от спутников, фактическая скорость поезда и пройденный им путь рассчитываются с помощью модулей 7 и 8 измерения параметров движения на основе данных, поступающих от колесных датчиков модуля 12 датчиков пути и скорости. Модули центральной обработки информации 4 и 5 на основе данных от всех других модулей определяют оптимальный скоростной режим. При приближении поезда на перегоне к границе занятого блок участка или другого препятствия с известной координатой, модули центральной обработки информации 4 и 5 осуществляют требуемое по условиям безопасности движения снижение скорости. Для этого они воздействуют через блок 1 контроля безопасности и усилитель 2 на электропневматический клапан 3.
В отличие от прототипа, в заявляемом устройстве работает блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, который осуществляет выбор оптимального технологического алгоритма управления торможением и проверки бдительности машиниста в зависимости от полноты и достоверности всей поступающей на локомотив оперативной информации. Это позволяет повысить безопасность движения и предотвращает частые переходы устройства на работу по резервному алгоритму со ступенчатым контролем скорости, при котором снижается участковая скорость движения поезда. Блок 19 переключения технологических алгоритмов - управления торможением и проверки бдительности машиниста параллельно с приемником 15 спутниковой навигации с заданной периодичностью вырабатывает информацию о расчетной координате места нахождения локомотива. Для каждого отрезка впереди лежащего пути, с расчетной длиной, равной длине пути торможения перед препятствием, в оперативную память модулей центральной обработки информации 4 и 5 заносится информация из модуля 13 маршрута, которая дополняется оперативной информацией, приходящей через модуль 14 радиоканала цифровой связи от стационарных устройств системы (на чертеже не показаны). Эта информация имеет приоритет перед аналогичной по смыслу информацией, считанной из модуля 13 маршрута.
Например, при передаче модулем 14 по радиоканалу цифровой связи координат зоны внезапно появившегося препятствия на пути следования поезда (упавшее дерево, сход селевого потока, снежной лавины и т.д.), которые могут быть получены от различных подсистем внешнего наблюдения системы транспортной безопасности, блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста воздействием на модули (4 и 5) центральной обработки информации, изменяет алгоритмы управления торможением и подтверждения бдительности машинистом. То же происходит при прерываниях в нормальной работе радиоканала цифровой связи. В частности, в этих случаях управления торможением и проверки бдительности машиниста от машиниста требуется дополнительное подтверждение бдительности при проследовании каждого путевого светофора, и этот режим сохраняется до восстановления нормального приема информации модулем 14 по радиоканалу цифровой связи. Для повышения безопасности блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста использует информацию, передаваемую по радиоканалу цифровой связи от путевых устройств интервального регулирования, при каждом вступлении поезда на очередную рельсовую цепь. Эта информация включает идентификационный номер очередной рельсовой цепи, координаты ее входного конца, длину и идентификационный номер следующей за ней рельсовой цепи. Это позволяет повысить достоверность контроля правильности функционирования аппаратуры посредством проверки совпадения прогнозируемых и фактических событий. Так, например, совпадение ожидаемого по электронной карте маршрута идентификационного номера рельсовой цепи с полученным текущим номером является дополнительной проверкой правильности работы модуля 13 маршрута, а совпадение измеренной длины данной рельсовой цепи с ее длиной, известной из электронной карты маршрута, гарантирует исправную работу модуля 13 маршрута, приемника 15 спутниковой навигации, модулей (7 и 8) измерения параметров движения, и модуля 12 датчиков пути и скорости.
Надежность работы устройства дополнительно повышается в местах, где надежно работает функция уточнения координаты места нахождения поезда по изменению параметров (синхрогрупп в случае АЛС-ЕН) кодового сигнала, поступающего в локомотивное устройство из рельсовых цепей на границах рельсовых цепей. Если зарегистрированное модулями (4 и 5) центральной обработки информации место смены параметров кодовых сигналов АЛС-ЕН соответствует расчетной координате границы блока участка по электронной карте маршрута, то эта информация используется ими для дополнительной коррекции ошибки вычисления текущей координаты местонахождения поезда. Особенно это помогает при прохождении поездом мест с неуверенным радиоприемом, так как дублирует аналогичную информацию, передаваемую от путевых устройств интервального регулирования по радиоканалу цифровой связи и принимаемую модулем 14.
Таким образом, предлагаемое техническое решение обеспечивает повышение безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| Система обеспечения безопасности на железнодорожном транспорте | 2020 |
|
RU2761763C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов. Устройство содержит блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу. К межмодульному интерфейсу подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации. Входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной. В устройство введен блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу. При этом функция выбора алгоритма управления осуществляется с учетом информации, передаваемой по радиоканалу цифровой связи от путевых устройств интервального регулирования, при каждом вступлении поезда на очередную рельсовую цепь. Достигается повышение безопасности движения. 1 ил.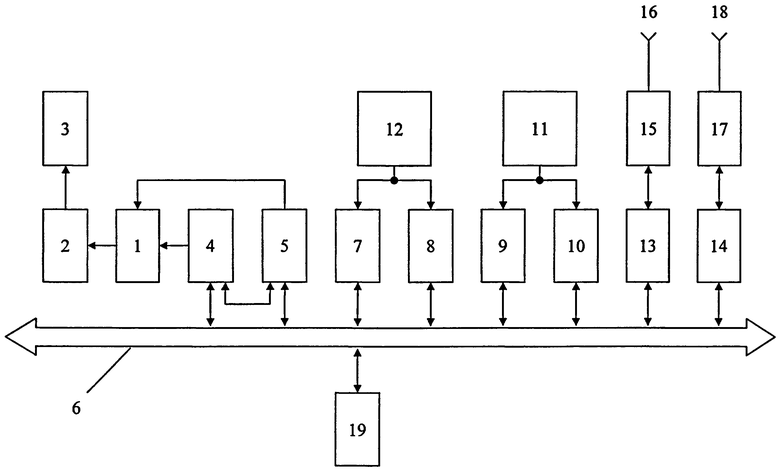
Устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, отличающееся тем, что в него введен блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, при этом функция выбора алгоритма управления осуществляется с учетом информации, передаваемой по радиоканалу цифровой связи от путевых устройств интервального регулирования при каждом вступлении поезда на очередную рельсовую цепь.
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ЛОКОМОТИВОМ И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2003 |
|
RU2262459C2 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| US 6799097 B2, 28.09.2004 | |||
| СИСТЕМА КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ ДИСЦИПЛИНЫ ПРОЦЕССА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ (СКТД) | 2005 |
|
RU2307041C1 |

