Изобретение относится к системам управления транспортными средствами и может быть использовано для управления коммунальным транспортом, например монорельсовым транспортом.
Централизованное, высокоточное, графико–интервальное регулирование движения поездов монорельсовых дорог, обеспечение безопасности перевозок пассажиров, является актуальной задачей.
Существующие системы управления не обеспечивают достаточный уровень безопасности движения, т.к. значительный обмен информацией осуществляется через диспетчера, кроме того, значительный объем рутинных операций выполняются с участием персонала.
Известна система управления транспортными средствами (a.c.CCCP №1837328, G 05 F 15/00 от 30.08.98), содержащая сервопривод, блок определения скорости, блок коммутации, три блока постоянной памяти, три вычислителя, два счетчика, два регистра, триггер, четыре блока сравнения, генератор тактовых импульсов, логические элементы, два привода грузообмена и два индикатора.
В известной системе за оператором сохраняются функции контроле с возможностью вмешиваться в технологические процессы, а все рутинные операции выполняются без участия персонала и в более сжатые сроки.
Известен информационный комплекс “Спутник”, решающий вопросы навигации, обмена информацией, торможения, диспетчерского контроля: сбор, передачу, прием, хранение и отображение информации о движении поездов, состоянии блок-участков, перегонов, переездов, приемоотправочных путей, узлов автоматики и телемеханики (“Локомотив”, 1997, №6, с.32-35).
Известно устройство предупредительной сигнализации для поездного диспетчера (пат. РФ №2025363, B 61 L 27/04 от 02.03.92), содержащее блоки памяти, сигнализатор, коммутатор, информационные входы которого подключены к выходам блоков памяти, а выходы - к входам сравнения, одни из выходов которых подключены к входам элемента ИЛИ, блок определения категории поезда, таймер, блок вычисления разности, датчик бодрствования диспетчера, дешифратор, блок фиксации номера поезда.
Известно устройство для информации в системах железнодорожной автоматики (пат. РФ №2094279, В 61 L 27/04 от 30.10.97), содержащее информационное табло, включающее в себя блоки индикации состояния объектов и номеров поездов, выполненные в виде последовательно соединенных регистра сдвига, входом синхронизации и информационным входом которого образованы первый и второй входы блока, преобразователя сигнала и индикатора, приемник информации, блок памяти, информационный регистр и формирователь команд управления, подключенный к шифратору.
Известен способ управления движением электроподвижных составов монорельсовой транспортной системы по трассе и ее перегону (пат. РФ №2196695, В 61 L 27/04 от 20.01.03) - прототип.
Система управления для реализации способа управления движением электроподвижного состава монорельсовой транспортной системы по перегону трассы содержит систему диспетчерского управления с заранее рассчитанными фазовыми координатами границ характерных участков рассматриваемого перегона трассы, включающими в себя координату точки окончания характерного k-го участка Sk, требуемую скорость в конце этого участка Vтр.к и требуемое время прихода состава в точку окончания характерного участка Ттр.к, систему управления движением электроподвижного состава, включающую бортовой контроллер с блоками памяти, обработки и сравнения, датчики положения и скорости, формирователь управляющих сигналов для тяговых электроприводов состава. Управляющий сигнал для тягового электропривода бортовой контроллер формирует в зависимости от вычисленной дискретно с некоторым тактом Тас требуемой скорости Vтр по измеренным значениям пройденного пути S и текущей скорости движения состава V датчиками положения и скорости.
Недостатками известных систем управления являются:
недостаточная аппаратная надежность как отдельных компонентов, так и всей системы управления в целом;
неустойчивость к двум последовательным отказам;
невысокая “живучесть” систем управления;
неудовлетворительная защищенность от несанкционированных или злоумышленных действий;
неудовлетворительное парирование сбоев.
Предлагаемая система управления движением электроподвижного состава устраняет перечисленные выше недостатки.
Технической задачей изобретения является обеспечение централизованного высокоточного графико - интервального регулирования движения поездов монорельсовой дороги и обеспечение безопасности перевозок пассажиров, которая выполняется при соответствующей поддержке системы диспетчерского управления (СДУ) системами управления станциями (СУС) и системами автоблокировки (САБ).
Для решения поставленной задачи предлагается система управления движением электроподвижного состава (СУ ЭПС), содержащая датчики исходной информации, выполненные в виде датчиков скорости движения и положения, контроллеры двигателей, выходы которых соединены с управляющими входами двигателей, первый бортовой контроллер, первое устройство отображения информации и панель управления, отличающаяся тем, что в нее введены второй бортовой контроллер и второе устройство отображения информации, при этом образованы независимые друг от друга автоматические контуры управления, в которых первый и второй бортовые контроллеры подключены к группе выходов панели управления, характеризующих значения тяги и торможения, и соединены по одному из последовательных интерфейсов с датчиками скорости движения и датчиками положения, по другому последовательному интерфейсу - с контроллерами двигателей и между собой с возможностью контроля вторым бортовым контроллером функционирования первого бортового контроллера, а по магистрали Ethernet - с первым устройством отображения информации и системой диспетчерского управления, а также ручной контур управления, в котором контроллеры двигателей подключены к группам выходов панели управления, характеризующих признак режима и значения тяги и торможения, а выходы датчиков скорости через третий последовательный интерфейс соединены со вторым устройством отображения информации.
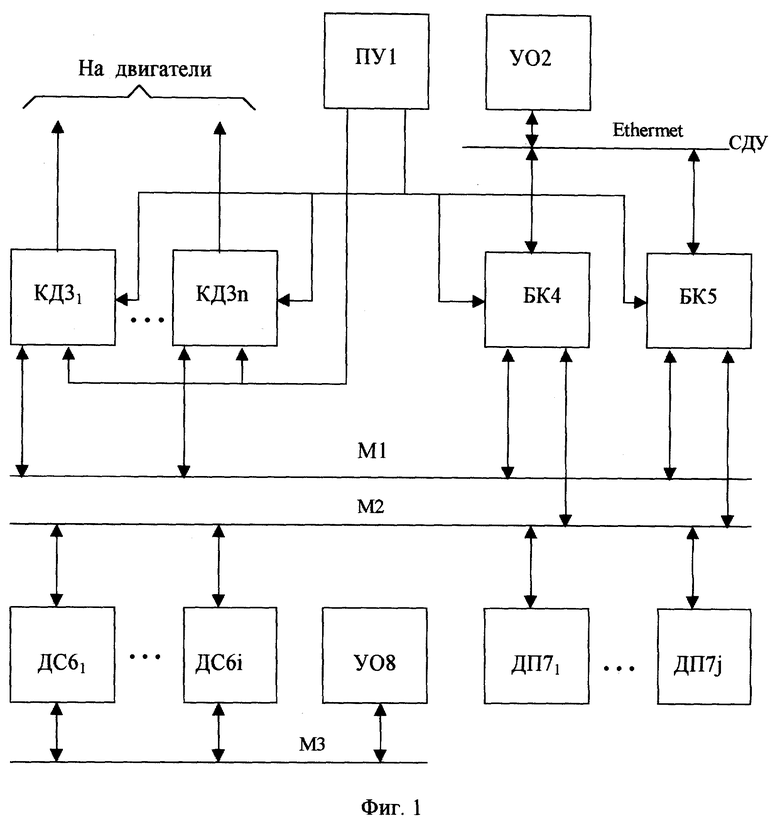
На фиг.1 показана блок-схема системы управления движением электроподвижного состава (ЭПС); на фиг.2 - блок-схема бортового контроллера (БК); на фиг.3 - блок-схема контроллера двигателя (КД).
На фиг.1 показано: панель управления (ПУ1), первое устройство отображения (УO2), контроллеры 3 двигателей (КД31,..., КД3n), первый бортовой контроллер 4, второй бортовой контроллер 5, последовательный интерфейс M1, последовательный интерфейс М2, последовательный интерфейс М3, датчики 6 скорости ДС61,..., ДС6i, датчики 7 положения ДП71,..., ДП7j, второе устройство 8 отображения (УO8). Первый и второй БК4 и БК5 соединены по последовательному интерфейсу М2 с ДС61,..., ДС6i и ДП71,..., ДП7j, а по последовательному интерфейсу M1 - с КД31,..., КД3n. Первая группа управляющих выходов ПУ1 соединена с первыми входами КД31,..., КД3n, вторая группа управляющих выходов ПУ1 соединена со вторыми входами КД31,..., КД3n, управляющие выходы которых являются управляющими выходами для связи с n-двигателями электроподвижного состава, вторая группа управляющих выходов ПУ1 соединена с входами БК4 и БК5, БК4 и БК5, а также УO2 соединены магистралью Ethernet, ДС61,..., ДС6i по последовательному интерфейсу М3 соединены с УO8.
На фиг.2 показано: контроллер 9 Ethernet, устройство 10 обработки данных (УОД 10), порт 11 ввода, первый последовательный порт 12, второй последовательный порт 13. Выходы порта 11 ввода и первого, и второго последовательных портов 12 и 13 параллельно соединены с входами УОД10, выход которого соединен с входом контроллера 9 Ethernet.
На фиг.3 показано: порт 14 вывода, устройство 15 обработки данных (УОД15), последовательный порт 16, первый порт 17 ввода, второй порт 18 ввода. Выходы портов 16, 17 и 18 параллельно соединены с входами УОД15, выход которого соединен с входом порта 14 вывода.
Система работает следующим образом.
В режиме управления движением ЭПС “Автоматический” движение выполняется под управлением БК4 без участия машиниста. Режим ручной предназначен для движения ЭПС под управлением машиниста в случае неисправности в системе, препятствующей автоматическому управлению, для высадки пассажиров на ближайшей станции и для увода ЭПС с трассы на ремонт.
Выбор режима управления осуществляется машинистом с ПУ1. Признак режима поступает на БК4 и БК5, на КД31,..., KД3n для выбора входных управляющих воздействий от БК4 и БК5 или от ПУ1.
Режим “Автоматический”.
Трасса перегона от станции до станции разбита на характерные участки, отличающиеся по плану (в горизонтальной плоскости) или по профилю (в вертикальной плоскости). Характерные участки характеризуются фазовыми координатами, включающими координату конца участка, тип участка (прямолинейный или дуга, горизонтальный или уклон), радиус поворота для криволинейного участка, угол уклона, максимально допустимую скорость на участке, требуемую скорость в конце участка, требуемое время прихода состава в точку окончания характерного участка. Данные характерных участков - тип участка, радиус поворота для криволинейного участка, угол уклона, максимально допустимая скорость на участке, координаты границ характерных участков представляют постоянную часть и занесены в память бортовых контроллеров БК4 и БК5.
На остановке БК4 и БК5 получают недостающие данные через магистраль из системы диспетчерского управления (СДУ, на чертежах не показана) для расчета графика движения по перегону от станции до станции, а именно фазовые координаты границ характерных участков рассматриваемого перегона трассы, включающие в себя координату точки окончания характерного k-го участка Sk, тpeбyeмyю скорость в конце этого участка Утр.к и требуемое время прихода состава в точку окончания характерного участка Ттр.к.
Текущее значение скорости БК4 и БК5 получают через магистраль М2 от ДС61,..., ДС6i.
Координаты прохождения границ участков и перегона от станции до станции БК4 и БК5 получают через магистраль М2 от ДП71,..., ДП7j.
БК4 и БК5 в процессе движения по характерному участку перегона требуемую скорость движения Vтр вычисляют дискретно с некоторым тактом Тас, исходя из условий обеспечения дальнейшего равномерного движения состава в соответствии с выражением
Vтр=(Sk-S)/(Ттр.к-Ттек).
При достижении границы одного характерного участка перегона в качестве координат целевой точки БК4 и БК5 принимают фазовые координаты точки окончания следующего характерного участка и продолжают процесс вычисления требуемой скорости движения Vтр.
БК4 в зависимости от значении Vтр и V определяет значение тяги (торможения), которое передает в контроллеры двигателей КД31,..., КД3n и БК5 для контроля. КД31,..., КД3n формирует управляющие сигналы для соответствующего двигателя (тягового электропривода). Тип и характер управляющих сигналов определяется типом двигателя. Один контролер двигателя КД управляет одним двигателем. Количество двигателей определяется числом вагонов электроподвижного состава.
БК5 контролирует в каждом такте Тас функционирование БК4 получением от него через магистраль M1 расчетных данных и определяет достоверность работы БК4 путем сравнения полученных расчетных данных от БК4 со своими расчетными данными. В случае отрицательного результата контроля БК5 выдает эту информацию на УО2 машинисту и СДУ как признак “Сбой”. Движение продолжается в автоматическом режиме при повышенной бдительности машиниста. При повторном отрицательном результате контроля в следующем такте управления движения БК5 формирует на УО признак “Отказ”, машинист переходит на режим управления “Ручной”.
Повышение бдительности машиниста заключается в контроле поездной обстановки (скорости) на УO8 для принятия решения об экстренном торможении.
Режим “Ручной”.
Этот режим задается машинистом с ПУ1. Признак “Ручной” поступает в БК4 и БК5 для запрещения их работы и на КД31,..., KД3n для разрешения работы с ПУ1. Управление двигателями выполняется машинистом с ПУ1 (три признака значения тяги и три признака значения торможения). Данные о скорости поступают от ДС61,..., ДС6i через магистраль М3 на УO8, которое усредняет значение скорости и отображает для контроля машинисту.
БК представляют собой типовые вычислительные устройства с набором портов (контроллеров, устройств или адаптеров) ввода - вывода и содержат устройство обработки данных, два последовательных порта RS-485, порт ввода дискретных сигналов, контроллер интерфейса Ethernet 10 Base-T no IEEE 802.3.
Контроллеры двигателей (КД) представляют собой типовые вычислительные устройства с набором портов (контроллеров, устройств или адаптеров) ввода - вывода и содержат устройство обработки данных, последовательный порт RS-485, два порта ввода дискретных сигналов, порт вывода аналоговых сигналов. Отказ нескольких КД (или двигателей) не приводит к потере управления движением, т.к. потеря общей тяги (торможения) учитывается БК и компенсируется возрастанием значений тяги (торможения) на остальные двигатели.
ДС61,..., ДС6i, ДП71,..., ДП7j резервированы, одиночный их отказ не оказывает влияния на управление движением.
Таким образом, исполнение предлагаемой системы управления движением ЭПС с двумя независимыми контурами управления обеспечивает:
высокую аппаратную надежность как отдельных компонентов, так и всей системы управления в целом;
устойчивость к двум последовательным отказам;
повышенную живучесть за счет реконфигурации и наличия резервированных каналов, датчиков скорости и датчиков положения, контроллеров двигателей по количеству вагонов;
аппаратную и программную защищенность от несанкционированных или злоумышленных действий;
парирование сбоев.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОБЛОКИРОВКИ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2007 |
|
RU2349481C2 |
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2013 |
|
RU2541585C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2015 |
|
RU2591551C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |


Изобретение относится к системам управления транспортными средствами и предназначено для использования при реализации управления коммунальным, например монорельсовым, транспортом. Предложенная система содержит два контура управления - автоматический и ручной. Автоматический контур включает в себя два бортовых контроллера, первое устройство отображения информации, датчики скорости движения, датчики положения, последовательные интерфейсы, контроллеры двигателей. В ручной контур входят панель управления с управляющими выходами, последовательный интерфейс и второе устройство отображения информации. Изобретение обеспечивает централизованное высокоточное графико-интервальное регулирование движения поездов монорельсовой дороги и повышенную безопасность перевозок пассажиров. 3 ил.
Система управления движением электроподвижного состава, содержащая датчики исходной информации, выполненные в виде датчиков скорости движения и положения, контроллеры двигателей, выходы которых соединены с управляющими входами двигателей, первый бортовой контроллер, первое устройство отображения информации и панель управления, отличающаяся тем, что в нее введены второй бортовой контроллер и второе устройство отображения информации, при этом образованы независимые друг от друга автоматические контуры управления, в которых первый и второй бортовые контроллеры подключены к группе выходов панели управления, характеризующих значения тяги и торможения, и соединены по одному из последовательных интерфейсов с датчиками скорости движения и датчиками положения, по другому последовательному интерфейсу - с контроллерами двигателей и между собой с возможностью контроля вторым бортовым контроллером функционирования первого бортового контроллера, а по магистрали Ethernet - с первым устройством отображения информации и системой диспетчерского управления, а также ручной контур управления, в котором контроллеры двигателей подключены к группам выходов панели управления, характеризующих признак режима и значения тяги и торможения, а выходы датчиков скорости через третий последовательный интерфейс соединены со вторым устройством отображения информации.
| СПОСОБЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И ЕЕ ПЕРЕГОНУ | 2002 |
|
RU2196695C1 |
| RU 2167403 C1, 20.05.2001 | |||
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ В СИСТЕМАХ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 1992 |
|
RU2094279C1 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |

