Изобретение относится к области гироскопической техники и предназначено для измерения углов наклона подвижного объекта с дальнейшим использованием этой информации в системах пространственной стабилизации средств обнаружения цели и средств вооружения.
В качестве первичных датчиков информации об углах наклона подвижных объектов используются гироскопические датчики горизонта (датчики крена, гировертикали, силовые гирогоризонты индикаторного типа). В настоящее время для современных образцов спецтехники все более широкое применение находят гирогоризонты, сконструированные по схеме индикаторно-силовых платформ, где в качестве индикаторных гироузлов используются прецизионные гироскопы. Известны гирогоризонты, конструктивно входящие в системы курсокреноуказания [1, 2]. Ближайшим аналогом, принятым за прототип, является [2].
В общем случае точность гирогоризонта определяется параметрами элементов, входящих в систему горизонтальной коррекции и в канал силовой стабилизации, условиями эксплуатации и параметрами движения объекта, а именно величиной и длительностью ускорений, дрейфом гироскопа и реакцией гироскопа на ускорение (скоростью коррекции). Скорость коррекции устанавливается на практике, исходя из обеспечения реальной точности в заданных условиях эксплуатации объекта.
Все возрастающие требования по эффективности средств вооружения в условиях движущегося объекта предъявляют и более высокие требования к точности систем стабилизации и в первую очередь к датчикам первичной информации - гирогоризонтам. При этом основным требованием по точности гирогоризонта является снижение динамической погрешности.
Динамическая составляющая погрешности гирогоризонта определяется выражением
где  - скорость горизонтальной коррекции,
- скорость горизонтальной коррекции,
t - время воздействия ускорения.
Уменьшение скорости горизонтальной коррекции с целью снижения динамической составляющей погрешности гирогоризонта ограничено требованием по обеспечению статической погрешности, определяемой выражением
где  - дрейф гироскопа, состоящий из собственного случайного дрейфа гироскопа, дрейфа под воздействием горизонтальной составляющей скорости вращения Земли ωЗ•cosϕ и систематической составляющей дрейфа;
- дрейф гироскопа, состоящий из собственного случайного дрейфа гироскопа, дрейфа под воздействием горизонтальной составляющей скорости вращения Земли ωЗ•cosϕ и систематической составляющей дрейфа;
Δ - зона линейности чувствительного элемента горизонта.
Исходя из этого соотношения и учитывая линеаризацию выходных характеристик чувствительных элементов горизонта на качке, крутизна которых падает в 3-5 раз, на практике скорость горизонтальной коррекции устанавливается в пределах 2÷4 о/мин.
Проведем оценку динамической погрешности гирогоризонта на качке при следующих параметрах: Т = 6 с - период качки,  = 4 о/мин = 4'/с.
= 4 о/мин = 4'/с.

Эта динамическая погрешность определяет колебания линии выстрела относительно плоскости горизонта на дистанции 10 км в пределах ±33 м.
Возрастающие требования по эффективности средств вооружения вызывают необходимость повышения точности измерения углов наклона в условиях движущегося объекта.
Изобретение направлено на повышение точности гирогоризонта за счет компенсации динамической погрешности при движении объекта. Это достигается тем, что в гирогоризонт, содержащий гироузел, по ортогональным измерительным осям которого установлены моментные датчики и датчики угла, чувствительные элементы горизонта, установленные на внутренней раме бикарданова подвеса, по осям которого установлены датчики выходной информации и двигатели стабилизации, причем выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к выходам соответствующих моментных датчиков, а выходы датчиков угла через усилители мощности подключены к соответствующим двигателям стабилизации, введены два суммирующих устройства, блок задержки и исполнительное реле, а каждый чувствительный элемент гирогоризонта выполнен в виде двух встречно включенных акселерометров, имеющих разные статистические и одинаковые динамические характеристики, причем выходы акселерометров каждого чувствительного элемента горизонта подключены к соответствующим суммирующим устройствам, выходы которых подключены к входам усилителей горизонтальной коррекции, выход блока задержки подключен к исполнительному реле, контакты которого включены в выходную цепь одного из двух акселерометров каждого чувствительного элемента горизонта.
На фиг. 1 - функционально-кинематическая схема предлагаемого гирогоризонта; на фиг.2 представлена кинематическая схема чувствительного элемента горизонта; на фиг.3 представлены графики, поясняющие формирование выходного сигнала чувствительного элемента горизонта при качке объекта.
Сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем: предлагаемый гирогоризонт (фиг.1) представляет собой двухосную платформу, состоящую из наружной 1 и внутренней 2 рам, по осям которых установлены датчики выходной информации 3, 4, а также двигатели стабилизации 5, 6. На раме 2 установлены два чувствительных элемента горизонта 7, 8, каждый из которых выполнен в виде двух встречно включенных акселерометров 9, 10 и 11, 12, имеющих разные статические и одинаковые динамические характеристики, и гироузел 13.
По ортогональным измерительным осям гироузла 13 установлены моментные датчики 14, 15 и датчики угла 16, 17. Конструктивно в гирогоризонт входят два усилителя горизонтальной коррекции 18, 19 и два усилителя мощности 20, 21. Дополнительно в гирогоризонт введены два суммирующих устройства 22, 23, блок задержки 24 и исполнительное реле 25, контакты которого 26, 27 установлены в выходной цепи одного из двух акселерометров каждого чувствительного элемента горизонта.
Выходы акселерометров 9, 10 и 11, 12 в противофазе подключены ко входам соответствующих суммирующих устройств 22, 23, выходы устройств 22, 23 подключены к входам усилителей горизонтальной коррекции 18, 19, а выход блока задержки 24 подключен к исполнительному реле 25.
Формирование управляющего сигнала горизонтальной коррекции происходит следующим образом. Пусть в процессе движения объекта акселерометры воспринимают горизонтальную составляющую ускорения ä при воздействии качки объекта в виде A•sinωt, где А - амплитуда ускорений, ω - круговая частота.
Дифференциальное уравнение моментов, действующих на акселерометр, запишется в следующем виде:
где Х - смещение инерциальной массы;
m - инерциальная масса акселерометра;
Кд - коэффициент демпфирования;
С - удельный позиционный момент.
Для сильно задемпфированных акселерометров и малых ω уравнение (1) примет следующий вид:
где 
Отсюда решение этого уравнения и сдвиг по фазе γ:
где первое слагаемое определяет постоянную, а второй член - периодическую составляющую ошибки прибора, или, учитывая, что T2ω2>>1:
где γ = arctgTω.
Запишем решение для системы, состоящей из двух акселерометров с инерциальными массами m1, m2.
где индексы "1" и "2" присвоены параметрам первого и второго акселерометров соответственно (фиг.2).
Из соотношения (4) следует, что если подобрать параметры акселерометров таким образом, чтобы выполнилось условие:
и полагая, что при больших значениях Кg1 и Кg2 сдвиги фаз γ1 и γ2 близки к π/2 и мало отличаются между собой, можно получить достаточно близкие по величине значения периодической составляющей в показаниях акселерометров.
На фиг. 2 представлена кинематическая схема блока акселерометров, и на фиг. 3 - графическое отображение формирования управляющего сигнала и компенсации периодической составляющей в показаниях чувствительного элемента горизонта в условиях качки объекта.
Таким образом, при движении объекта сигналы акселерометров сначала поступают в противофазе на суммирующие устройства 22, 23, где взаимно компенсируется динамическая составляющая с периодом качки, а затем через усилители горизонтальной коррекции 18, 19 на моментные датчики 14, 15.
С целью исключения возрастания времени готовности гирогоризонта в период запуска блок задержки 24 через контакты 26, 27 исполнительного реле 25 отключает выходы акселерометров 10, 11, имеющих меньшую крутизну статической характеристики, от входа соответствующих суммирующих устройств 22, 23 на период времени, соответствующий времени готовности гирогоризонта, т.е. в период запуска гирогоризонта система коррекции работает в штатном режиме от акселерометров, имеющих наибольшую крутизну рабочей характеристики, обеспечивая тем самым требуемое время готовности гирогоризонта.
По мнению автора, предлагаемый гирогоризонт за счет компенсации динамической составляющей погрешности с периодом качки позволит повысить точность систем пространственной стабилизации средств вооружения и обнаружения цели при движении объектов спецтехники.
Библиографические данные
1. Пельпор Д.С. Теория гироскопических стабилизаторов, ч. 5.2. - М.: Машиностроение, 1965.
2. Патент РФ 2124184, приоритет 15.12.1996. БИ 36 1998.2
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| ГИРОГОРИЗОНТ ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДЕФОРМАЦИЙ ОПОР РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2001 |
|
RU2207508C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ С УСТРОЙСТВОМ ВСТРОЕННОГО КОНТРОЛЯ | 2001 |
|
RU2207505C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС (ВАРИАНТЫ) | 2002 |
|
RU2215263C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2002 |
|
RU2215993C1 |


Использование: в гироскопической технике. Сущность: в гирогоризонт, представляющий собой двухосную индикаторно-силовую платформу, содержащую гироузел с датчиками угла и момента, двигатели стабилизации и датчики выходной информации, введены блок задержки и исполнительное реле. Каждый чувствительный элемент горизонта выполнен в виде двух встречно включенных акселерометров, имеющих разные статические и одинаковые динамические характеристики. Выходы акселерометров подключены к соответствующим, введенным в гирогоризонт суммирующим устройствам, выходы которых через усилители подключены к датчикам момента гироузла. Это позволяет компенсировать динамическую составляющую погрешности при движении объекта. С целью исключения увеличения времени готовности гирогоризонта блок задержки через исполнительное реле отключает на время готовности прибора в каждом чувствительном элементе горизонта один из двух акселерометров, имеющих меньшую крутизну статической характеристики. Технический результат: повышение точности гирогоризонта, используемого в системах пространственной стабилизации специальных средств подвижных объектов. 3 ил.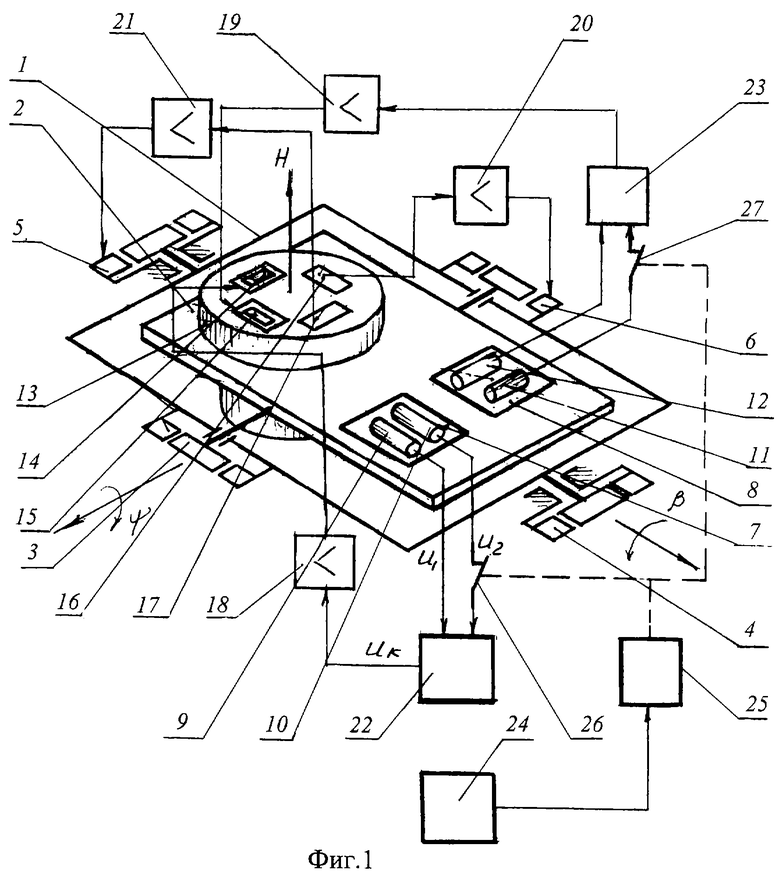
Гирогоризонт, содержащий гироузел, по ортогональным измерительным осям которого установлены моментные датчики и датчики угла, чувствительные элементы горизонта, установленные на внутренней раме бикарданова подвеса, по осям которого установлены датчики выходной информации и двигатели стабилизации, причем выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены ко входам соответствующих моментных датчиков, а выходы датчиков угла через усилители мощности подключены к соответствующим двигателям стабилизации, отличающийся тем, что в него введены два суммирующих устройства, блок задержки и исполнительное реле, а каждый чувствительный элемент горизонта выполнен в виде встречно включенных акселерометров, имеющих разные статические и одинаковые динамические характеристики, причем выходы акселерометров подключены к соответствующим суммирующим устройствам, выходы которых подключены к входам усилителей горизонтальной коррекции, выход блока задержки подключен к исполнительному реле, контакты которого включены в выходную цепь одного из двух акселерометров каждого чувствительного элемента горизонта.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| Головка симметричного между вагонного штепсельного соединения для электрических проводов | 1928 |
|
SU13422A1 |
| DE 3019372 A, 26.11.1981 | |||
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 1992 |
|
RU2049931C1 |
| US 4530164 A, 23.07.1985. | |||

