Изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейного ускорения.
Известен акселерометр [1], содержащий чувствительный элемент, датчик угла, датчик момента и усилитель.
Наиболее близким по технической сущности является акселерометр [2], содержащий выполненные в пластине из монокристаллического кремния и соединенные между собой упругими перемычками неподвижную часть и подвижную часть, на которой расположена компенсационная катушка датчика момента, установленные на корпусе постоянный магнит с диаметральным направлением намагниченности и плата, на которой выполнены первый и второй электроды, генератор высокой частоты, первый и второй усилители переменного тока, первый дифференциальный усилитель, демодулятор, усилитель постоянного тока, дифференциальный емкостный датчик угла, содержащий первый и второй резисторы, образованный первым электродом и электропроводной поверхностью подвижной части первый конденсатор, образованный вторым электродом и электропроводной поверхностью подвижной части второй конденсатор, причем первый вывод первого резистора соединен с первым электродом, первый вывод второго резистора соединен с вторым электродом, вторые выводы первого и второго резисторов подсоединены к выходу генератора высокой частоты, вывод от электропроводной поверхности подвижной части соединен с выходом нулевого потенциала генератора высокой частоты, первый электрод подсоединен ко входу первого усилителя переменного тока, второй электрод подключен ко входу второго усилителя переменного тока, выход первого усилителя переменного тока подключен к прямому входу первого дифференциального усилителя, инверсный вход которого соединен с выходом второго усилителя переменного тока, к выходу усилителя постоянного тока подсоединена компенсационная катушка датчика момента.
Недостатком такого акселерометра является погрешность измерения ускорения, вызванная изменением выходного сигнала акселерометра вследствие изменения нулевого сигнала дифференциального емкостного датчика угла.
Техническим результатом изобретения является повышение точности измерения ускорения.
Данный технический результат достигается в акселерометре, содержащем выполненные в пластине из монокристаллического кремния и соединенные между собой упругими перемычками неподвижную часть и подвижную часть, на которой расположена компенсационная катушка датчика момента, установленные на корпусе постоянный магнит с диаметральным направлением намагниченности и плата, на которой выполнены первый и второй электроды, генератор высокой частоты, первый и второй усилители переменного тока, первый дифференциальный усилитель, демодулятор, усилитель постоянного тока, дифференциальный емкостный датчик угла, содержащий первый и второй резисторы, образованный первым электродом и электропроводной поверхностью подвижной части первый конденсатор, образованный вторым электродом и электропроводной поверхностью подвижной части второй конденсатор, причем первый вывод первого резистора соединен с первым электродом, первый вывод второго резистора соединен с вторым электродом, вторые выводы первого и второго резисторов подсоединены к выходу генератора высокой частоты, вывод от электропроводной поверхности подвижной части соединен с выходом нулевого потенциала генератора высокой частоты, первый электрод подсоединен ко входу первого усилителя переменного тока, второй электрод подключен ко входу второго усилителя переменного тока, выход первого усилителя переменного тока подключен к прямому входу первого дифференциального усилителя, инверсный вход которого соединен с выходом второго усилителя переменного тока, к выходу усилителя постоянного тока подсоединена компенсационная катушка датчика момента, тем, что в него введены второй и третий дифференциальные усилители, выход генератора высокой частоты подключен к прямому входу второго дифференциального усилителя, к инверсному входу которого подсоединен один из электродов, к прямому входу третьего дифференциального усилителя подключен выход второго дифференциального усилителя, к инверсному входу третьего дифференциального усилителя подсоединен вышеуказанный электрод, коэффициент усиления второго дифференциального усилителя выполнен равным коэффициенту усиления третьего дифференциального усилителя, поделенному на отношение напряжения на подключенном к электроду резисторе к напряжению на электроде.
Посредством введения в акселерометр второго и третьего дифференциальных усилителей, подключения выхода генератора высокой частоты к прямому входу второго дифференциального усилителя, а к его инверсному входу одного из электродов, подсоединения выхода второго дифференциального усилителя к прямому входу третьего дифференциального усилителя, а к его инверсному входу вышеуказанного электрода, выполнения коэффициента усиления второго дифференциального усилителя равным коэффициенту усиления третьего дифференциального усилителя, поделенному на отношение напряжения на подключенном к электроду резисторе к напряжению на электроде, обеспечивается измерение изменений нулевого сигнала дифференциального емкостного датчика угла. Полученные экспериментальными исследованиями или теоретическими зависимостями соотношения между изменением нулевого сигнала дифференциального емкостного датчика угла и выходными характеристиками акселерометра дают возможность корректировать выходной сигнал акселерометра с целью исключения погрешности измерения ускорения.
Таким образом, повышается точность измерения ускорения посредством акселерометра.
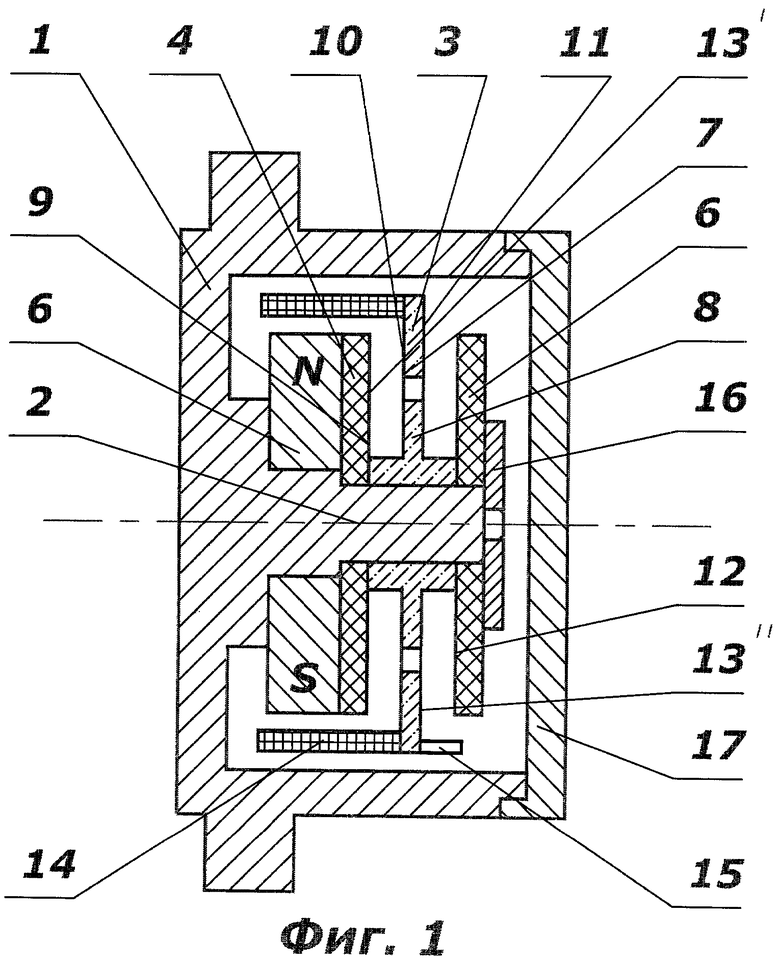
На фиг.1 представлен общий вид акселерометра, на фиг.2 - принципиальная электрическая схема акселерометра.
В акселерометре (фиг.1) в корпусе 1 на стойке 2 установлены пластина 3 из монокристаллического кремния, пластина 4 и плата 5 из поликора, а также постоянный магнит 6 дисковой формы с диаметральным направлением намагниченности. В пластине 3 выполнены соединенные между собой упругими перемычками подвижная часть 7 и неподвижная часть 8. Подвижная часть 7, неподвижная часть 8 и упругие перемычки выполнены единым элементом методом анизотропного травления кремния. Пластина 4 установлена между постоянным магнитом 6 и пластиной 3 своей поверхностью 9 на неподвижную часть 8. Между плоскостью 10 подвижной части 7 и плоскостью 9 пластины 4, между плоскостью 11 подвижной части 7 и плоскостью 12 платы 5 образованы зазоры в 20-25 мкм. На обращенной к пластине 3 стороне пластины 4 напылены в виде слоя хром-медь-хром первый 13' и второй 13'' электроды дифференциального емкостного датчика угла, подвижный электрод которого образован плоскостью 10 подвижной части 7, выполненной электропроводной. На обращенной к постоянному магниту 6 плоскости 10 подвижной части 7 расположена компенсационная катушка 14 магнитоэлектрического датчика момента. На подвижной части 7 установлен груз 15. Постоянный магнит 6, пластина 3, пластина 4 и плата 5 закреплены на стойке 2 гайкой 16. Корпус 1 закрыт крышкой 17.
В акселерометре (фиг.2) выполнены генератор высокой частоты 18, первый 19 и второй 20 усилители переменного тока, первый дифференциальный усилитель 21, демодулятор 22 и усилитель постоянного тока 23.
В дифференциальном емкостном датчике угла выполнены образованный первым электродом 13' и электропроводной поверхностью 10 подвижной части 7 первый конденсатор и образованный вторым электродом 13'' и электропроводной поверхностью 10 подвижной части 7 второй конденсатор.
Первый вывод резистора R1 подключен к первому электроду 13' и входу первого усилителя переменного тока 19, к выходу которого подсоединен прямой вход первого дифференциального усилителя 21. К первому выводу резистора R2 подключены второй электрод 13'' и вход второго усилителя переменного тока 20, выход которого соединен с инверсным входом первого дифференциального усилителя 21. Выход генератора высокой частоты 18 подсоединен ко вторым выводам резисторов R1, R2 и входу опорного напряжения демодулятора 22. Выход первого дифференциального усилителя 21 подключен к сигнальному входу демодулятора 22, выход которого соединен с входом усилителя постоянного тока 23. Выход нулевого потенциала генератора высокой частоты 18 подсоединен к подвижному электроду 10, которым является электропроводная поверхность 10 подвижной части 7. Выход усилителя постоянного тока 23 подключен к первому выводу компенсационной катушки 14, ко второму выводу которой подсоединен нагрузочный резистор RH.
Выход генератора высокой частоты 18 подключен к прямому входу второго дифференциального усилителя 24, к инверсному входу которого подсоединен, например, первый электрод 13'. К прямому входу третьего дифференциального усилителя 25 подключен выход второго дифференциального усилителя 24, к инверсному входу третьего дифференциального усилителя 25 подсоединен первый электрод 13'.
Коэффициент усиления второго дифференциального усилителя 24 выполнен равным коэффициенту усиления третьего дифференциального усилителя 25, поделенному на отношение напряжения на резисторе R1 к напряжению на первом электроде 13'.
Акселерометр может быть выполнен и так, чтобы вместо первого электрода 13' к инверсным входам второго 24 и третьего 25 дифференциальных усилителей был подключен второй электрод 13''.
Акселерометр работает следующим образом.
При наличии ускорения по измерительной оси акселерометра, направленной перпендикулярно плоскостям 10, 11 подвижной части 7, подвижная часть 7 под действием силы инерции на груз 15 изменяет свое угловое положение относительно пластины 4. При этом изменяются емкости первого и второго конденсаторов и на входы первого 19 и второго 20 усилителей переменного тока поступают напряжения разной величины. В результате суммирования поступающих на разнополярные входы первого дифференциального усилителя 21 переменных напряжений с разной амплитудой с выходов первого 19 и второго 20 усилителей переменного тока с выхода первого дифференциального усилителя 21 на вход демодулятора 22 поступает напряжение, модулированное по амплитуде и фазе. После преобразования в демодуляторе 22 напряжения переменного тока в напряжение постоянного тока в усилителе постоянного тока 23 напряжение постоянного тока усиливается по величине и мощности. Проходящим через компенсационную катушку 14 с выхода усилителя постоянного тока 23 током в датчике момента акселерометра создается компенсационная сила, уравновешивающая действующую на груз 15 инерционную силу. При этом создаваемое протекающим через компенсационную катушку 14 датчика момента током падение напряжения на нагрузочном резисторе RH является мерой измеряемого ускорения.
Изменение параметров элементов дифференциального емкостного датчика угла вызывает изменение нулевого сигнала дифференциального емкостного датчика угла, что приводит к разбалансу следящей системы акселерометра. В результате отработки разбаланса следящей системы акселерометра происходит изменение углового положения подвижной части 7 относительно первого 13' и второго 13'' электродов, а также изменение напряжений на первом 13' и втором 13'' электродах. Данное обстоятельство служит основой для устранения погрешности акселерометра, вызванной изменением нулевого сигнала дифференциального емкостного датчика угла. Для этого производится сравнение напряжения на первом электроде 13' и выходного напряжения генератора высокой частоты 18.
При поступлении на прямой вход второго дифференциального усилителя 24 напряжения с выхода генератора высокой частоты 18, на инверсный вход второго дифференциального усилителя 24 напряжения на первом электроде 13' напряжение на выходе второго дифференциального усилителя 24 равно разности между напряжением с выхода генератора высокой частоты 18 и напряжением на первом электроде 13'. При подаче на прямой вход третьего дифференциального усилителя 25 выходного напряжения второго дифференциального усилителя 24, на инверсный вход третьего дифференциального усилителя 25 напряжения на первом электроде 13' выходное напряжение третьего дифференциального усилителя 25 составляет разность между выходным напряжением второго дифференциального усилителя 24 и напряжением на первом электроде 13'.
Так как коэффициент усиления второго дифференциального усилителя 24 равен деленному на отношение напряжения на резисторе R1 к напряжению на первом электроде 13' коэффициенту усиления третьего дифференциального усилителя 25, то при номинальном напряжении генератора высокой частоты 18 и отсутствии изменения нулевого сигнала дифференциального емкостного датчика угла выходное напряжение третьего дифференциального усилителя 25 равно нулю. Также при отсутствии изменения нулевого сигнала дифференциального емкостного датчика угла и при отклонении напряжения генератора высокой частоты 18 от номинального значения выходное напряжение третьего дифференциального усилителя 25 равно нулю.
В случае же изменения нулевого сигнала дифференциального емкостного датчика угла как при номинальном напряжении генератора высокой частоты 18, так и при его отклонении от номинального значения на выходе третьего дифференциального усилителя 25 появляется напряжение, пропорциональное изменению нулевого сигнала дифференциального емкостного датчика угла. Это изменение не зависит от того, равно ли напряжение генератора высокой частоты 18 номинальному значению или имеется отклонение от него.
Данное обстоятельство служит основой для корректировки выходных параметров акселерометра. Если известна зависимость между изменением нулевого сигнала дифференциального емкостного датчика угла и выходными параметрами акселерометра, то корректировку выходных параметров акселерометра можно выполнить, используя разные способы. Например, путем алгоритмической компенсации выходного сигнала акселерометра в устройстве, в которое подается напряжение с нагрузочного резистора RH.
Также можно преобразовать в напряжение постоянного тока напряжение с выхода «а» третьего дифференциального усилителя 25 и подать это напряжение на вход одного из каскадов усилителя постоянного тока 23, выполненного, например, как дифференциальный усилитель.
При такой корректировке выходного сигнала акселерометра устраняется погрешность измерения ускорения вследствие изменения нулевого сигнала дифференциального емкостного датчика угла, в результате повышается точность измерения ускорения посредством акселерометра.
Источники информации
1. Патент РФ №1795374, кл. G01P 15/08, 15/13. Компенсационный акселерометр. 1993 г.
2. Свидетельство на полезную модель РФ №17733, кл. G01P 15/08, 15/13. Компенсационный акселерометр. 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2514151C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2545469C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2016 |
|
RU2638919C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
Изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейного ускорения. Акселерометр содержит подвижную и неподвижную части, датчик момента с компенсационной катушкой и постоянным магнитом, дифференциальный емкостный датчик угла с двумя электродами на плате и двумя резисторами, генератор высокой частоты, первый и второй усилители переменного тока, три дифференциальных усилителя, демодулятор, усилитель постоянного тока. Выход генератора высокой частоты подключен к прямому входу второго дифференциального усилителя, к инверсному входу которого подсоединен один из электродов. К прямому входу третьего дифференциального усилителя подключен выход второго дифференциального усилителя, к инверсному входу третьего дифференциального усилителя подсоединен вышеуказанный электрод. Коэффициент усиления второго дифференциального усилителя выполнен равным коэффициенту усиления третьего дифференциального усилителя, поделенному на отношение напряжения на подключенном к электроду резисторе к напряжению на электроде. Изобретение обеспечивает повышение точности измерения ускорения. 2 ил.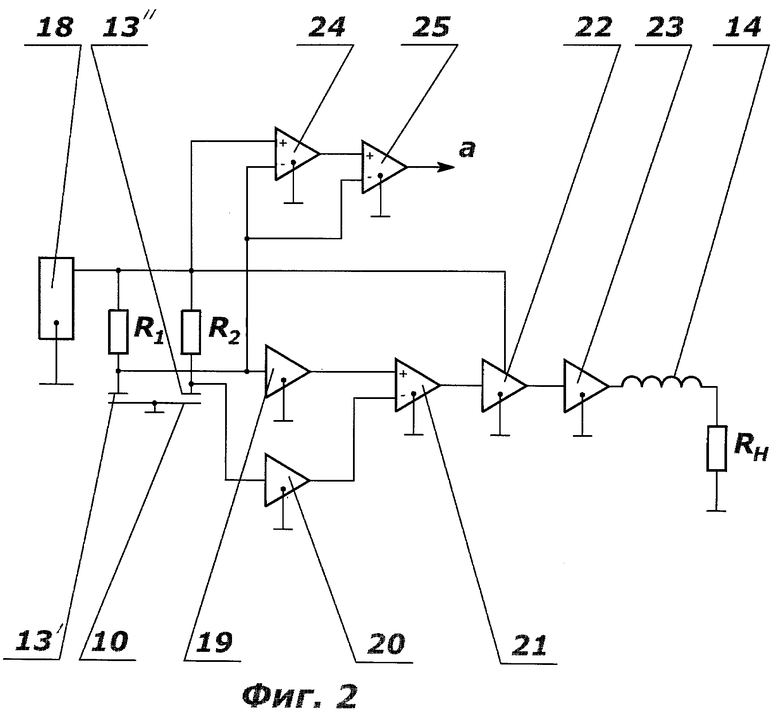
Акселерометр, содержащий выполненные в пластине из монокристаллического кремния и соединенные между собой упругими перемычками неподвижную часть и подвижную часть, на которой расположена компенсационная катушка датчика момента, установленные на корпусе постоянный магнит с диаметральным направлением намагниченности и плата, на которой выполнены первый и второй электроды, генератор высокой частоты, первый и второй усилители переменного тока, первый дифференциальный усилитель, демодулятор, усилитель постоянного тока, дифференциальный емкостный датчик угла, содержащий первый и второй резисторы, образованный первым электродом и электропроводной поверхностью подвижной части первый конденсатор, образованный вторым электродом и электропроводной поверхностью подвижной части второй конденсатор, причем первый вывод первого резистора соединен с первым электродом, первый вывод второго резистора соединен со вторым электродом, вторые выводы первого и второго резисторов подсоединены ко входу генератора высокой частоты, вывод от электропроводной поверхности подвижной части соединен с выходом нулевого потенциала генератора высокой частоты, первый электрод подсоединен ко входу первого усилителя переменного тока, второй электрод подключен ко входу второго усилителя переменного тока, выход первого усилителя переменного тока подключен к прямому входу первого дифференциального усилителя, инверсный вход которого соединен с выходом второго усилителя переменного тока, к выходу усилителя постоянного тока подсоединена компенсационная катушка датчика момента, отличающийся тем, что в него введены второй и третий дифференциальные усилители, выход генератора высокой частоты подключен к прямому входу второго дифференциального усилителя, к инверсному входу которого подсоединен один из электродов, к прямому входу третьего дифференциального усилителя подключен выход второго дифференциального усилителя, к инверсному входу третьего дифференциального усилителя подсоединен вышеуказанный электрод, коэффициент усиления второго дифференциального усилителя выполнен равным коэффициенту усиления третьего дифференциального усилителя, поделенному на отношение напряжения на подключенном к электроду резисторе к напряжению на электроде.
| Способ изготовления массы для тепловой изоляции | 1929 |
|
SU17733A1 |
| Компенсационный акселерометр | 1990 |
|
SU1795374A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| US 7337669 B2, 04.03.2008 | |||
| JP 3036680 B2, 24.04.2000. | |||

