Изобретение относится к области медицины, в частности хирургической эндоскопии, и может быть использовано для позиционирования, перемещения хирургических инструментов и осмотра полостей и полых органов организма.
Известно техническое решение, содержащее устройство для лечения кишечных непроходимостей тонкого и толстого кишечника, содержащее эндоскоп с приводом его перемещения, снабженным баллонами и гидравлическими или пневматическими механизмами (патент РФ №2502482 по кл. А61В 17/00 от 27.12.2013 г.).
Недостатком данного решения является то, что область его применения ограничивается только исследованием и лечением кишечника. Применение его в других органах, в частности в сосудах, исключено, т.к. используемый механизм перемещения полностью перекрывает просвет исследуемого органа. Кроме того, данное решение не исключает травматическое воздействие на исследуемые и подвергаемые процедурам лечения полые органы.
Известна конструкция гибкого эндоскопа для перемещения внутри полости организма, выполненного в виде гибкого рукава, расположенного в цилиндрическом корпусе и снабженного блоком с сильфонами, при этом сильфоны выполнены с возможностью надувания газом или жидкостью (патент РФ №2246891 по кл. А61В 1/00 от 20.02.2003 г.).
Недостатком данного эндоскопа являются его ограниченные возможности, обусловленные тем, что его габариты не позволяют использовать его при перемещении в полостях малых размеров, в частности в сосудах, и таким образом и не обеспечивают возможности тотального перемещения эндоскопа в полостях и сосудах организма. Кроме того, элементы эндоскопа в процессе работы полностью перекрывают просвет исследуемого органа, что также исключает его применение в сосудах, и не обеспечивают достаточное контактное давление надуваемых элементов на участки исследуемой ткани без травматического воздействия на стенки полостей, что делает его неэффективным при перемещении устройства по всему каналу полостей.
Задача, на решение которой направлено заявленное изобретение, заключается обеспечении возможности тотального перемещения эндоскопа, уменьшении его габаритов, повышении эффективности продвижения и снижении травматического воздействия на стенки исследуемых и подвергаемых лечению полых органов.
Поставленная задача решается за счет того, что в эндоскопе для продвижения внутри полостей организма, содержащем гибкий корпус с элементами его перемещения, размещенную в передней части корпуса головку с расположенной в ней видеокамерой, корпус выполнен в виде цепи подвижно соединенных между собой элементов, каждый из которых снабжен линейным двигателем, каждый элемент перемещения гибкого корпуса выполнен в виде гибких пластин из упругого материала, равномерно расположенных по периметру поверхности корпуса линейного двигателя, а концы каждой пластины закреплены на противоположных торцевых поверхностях линейного двигателя, при этом в головке передней части корпуса размещен манипулятор с инструментом для проведения необходимых процедур лечения, а в хвостовую часть гибкого корпуса введен проводник для электрической связи с видеокамерой, манипулятором и линейными двигателями.
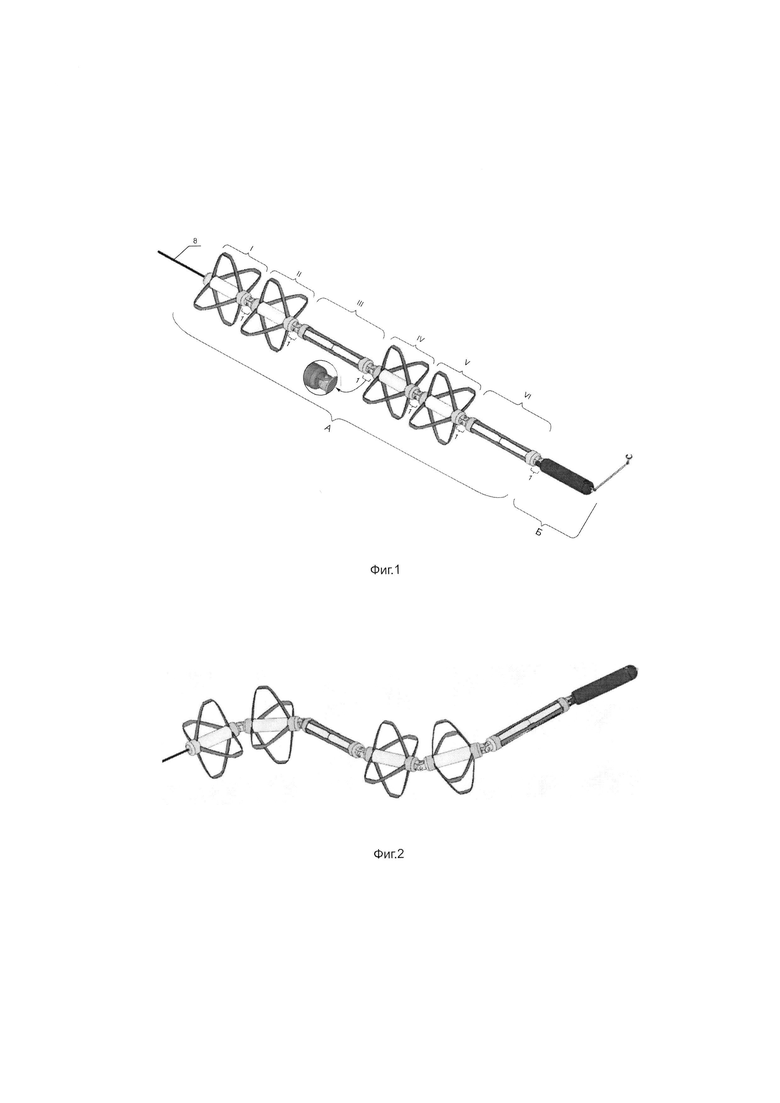
На фиг. 1 представлен общий вид эндоскопа для продвижения внутри полостей организма.
На фиг. 2 представлена иллюстрация движения эндоскопа с учетом естественных изгибов исследуемого органа.
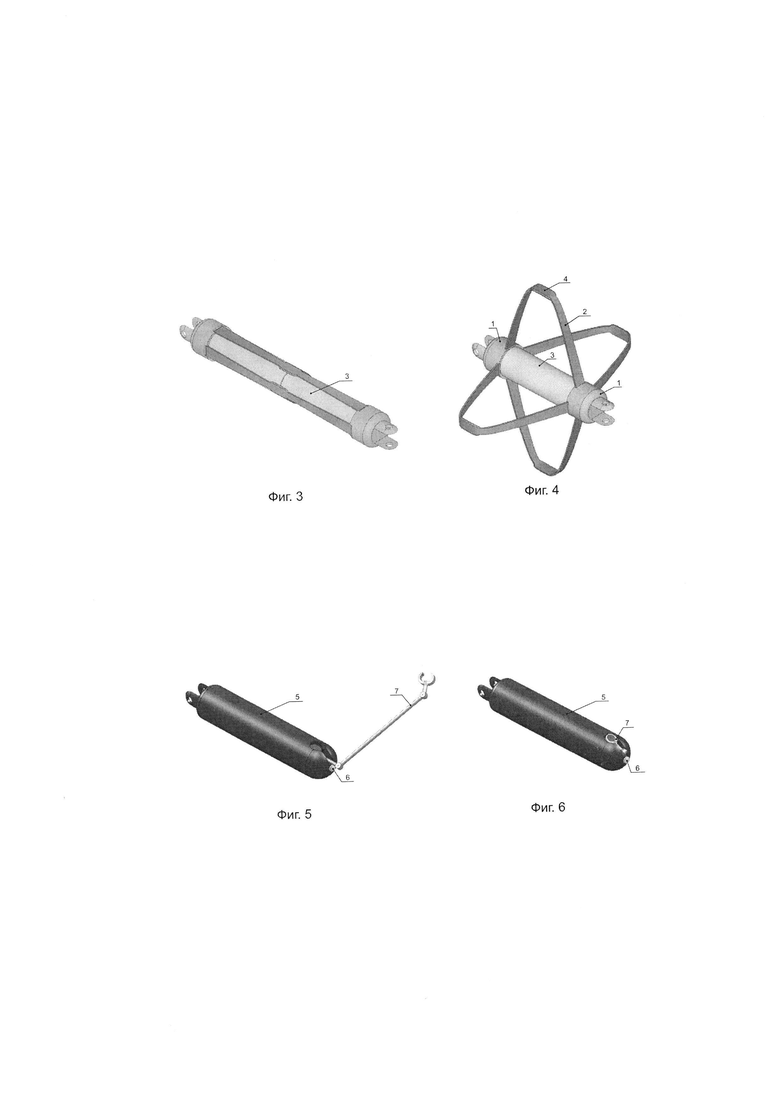
На фиг. 3 представлен элемент корпуса в сложенном положении упругих пластин.
На фиг. 4 представлена иллюстрация элемента корпуса в развернутом положении упругих пластин.
На фиг. 5 - головка с видеокамерой и манипулятором с инструментом в рабочем положении для проведения необходимых процедур лечения.
На фиг. 6 - головка с видеокамерой и манипулятором с инструментом в сложенном (транспортном) положении.
На фиг. 7 - иллюстрация диаграммы движения эндоскопа.
Эндоскоп для продвижения внутри полостей организма состоит из механизма доставки «А» (фиг.1) и механизма визуального наблюдения и манипулирования «Б» (фиг. 1).
Механизм доставки «А» состоит из рабочих звеньев, объединенных в три группы: I-IV, II-V и III-VI (фиг. 1).
Эндоскоп выполнен в виде гибкого корпуса с элементами 1, обеспечивающими подвижное соединение отдельных цепей корпуса. Корпус содержит элементы перемещения, каждый из которых выполнен в виде гибких пластин 2 из упругого материала, равномерно расположенных по периметру поверхности корпуса линейного двигателя 3. Концы пластины закреплены на противоположных торцевых поверхностях линейного двигателя, а в центральной части упругих пластин выполнены фиксирующие площадки 4, обеспечивающие фиксацию пластин к стенкам исследуемого участка полости организма в развернутом положении пластин. В головке 5 передней части корпуса размещены видеокамера 6 и манипулятор 7 с инструментом для проведения необходимых процедур лечения, а в хвостовую часть гибкого корпуса введен проводник 8 для электрической связи с видеокамерой, манипулятором и линейными двигателями.
Эндоскоп для продвижения внутри полостей организма работает следующим образом.
В процессе работы одна из групп находится в разложенном состоянии, обеспечивая фиксацию устройства относительно стенок полостей, вторая переходит из разложенного состояния в сложенное, а третья - из сложенного в разложенное. Полный цикл работы устройства разделяется на три этапа. На иллюстрации этим этапам соответствуют фиг. 7б, в, г соответственно
На первом этапе группа I-IV звеньев находится в разложенном состоянии, группа II-V переходит из разложенного состояния в сложенное, а III-VI - из сложенного в разложенное. На втором этапе в разложенном состоянии находится группа III-VI, из разложенного состояния в сложенное переходит I-IV, а из сложенного в разложенное - II-V. На третьем этапе в разложенном состоянии остается группа II-V, III-VI переходит из разложенного состояния в сложенное, а I-IV - из сложенного в разложенное. Далее цикл повторяется. Таким образом, группы звеньев работают синхронно и циклически со сдвигом фаз в 1/3 цикла, реализуя перистальтический принцип перемещения. Помимо описанного возможны иные алгоритмы управления с соблюдением того же принципа. В процессе перемещения осевая линия устройства повторяет естественные изгибы органа, минимизируя травматическое воздействие на него.
После перемещения устройства к участку органа, требующему осуществления лечебных процедур, механизм доставки приостанавливает работу, обеспечивая за счет разложенных звеньев фиксацию в необходимой точке, а манипулятор 7 устройства визуального наблюдения и манипулирования с соответствующим инструментом выводится из корпуса устройства и переводится в рабочее положение.
Данное устройство обеспечивает возможность тотального перемещения эндоскопа, уменьшения его габаритов, повышения эффективности продвижения эндоскопа и уменьшение травматических воздействий на стенки сосудов и полостей организма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2013 |
|
RU2515141C1 |
| ЗОНД И СПОСОБ ЕГО ПРОДВИЖЕНИЯ ВНУТРИ ПОЛОСТИ ТЕЛА (ВАРИАНТЫ) | 2000 |
|
RU2246891C2 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ КИШЕЧНЫХ НЕПРОХОДИМОСТЕЙ ТОНКОГО И ТОЛСТОГО КИШЕЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2502482C2 |
| СПОСОБ УДАЛЕНИЯ ЗАКУПОРИВАЮЩЕГО МАТЕРИАЛА (ВАРИАНТЫ) И АТЕРОЭКТОМИЧЕСКАЯ МИКРОМАШИНКА (ВАРИАНТЫ) | 2011 |
|
RU2476173C1 |
| СПОСОБ СОЗДАНИЯ ГЕМОСТАЗА С ВОЗМОЖНОСТЬЮ ВОССТАНОВЛЕНИЯ КРОВОТОКА В ТРУБЧАТЫХ ЭЛАСТИЧНЫХ СТРУКТУРАХ ОРГАНИЗМА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2485908C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391892C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| Зонд для прохождения каналов (варианты) | 2020 |
|
RU2746640C1 |
| СПОСОБ ОСОБО ТОЧНОЙ ОБРАБОТКИ ЗУБОВ И ПОРТАТИВНАЯ УСТАНОВКА С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ МАЛОГАБАРИТНОГО УСТРОЙСТВА ДЛЯ ОБРАБОТКИ ЗУБОВ | 2010 |
|
RU2443396C1 |
| СПОСОБ ОПЕРАЦИИ НА ОРГАНАХ ШЕИ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ОПЕРАЦИОННОГО ПРОСТРАНСТВА ПРИ ЕГО ОСУЩЕСТВЛЕНИИ | 2011 |
|
RU2469663C1 |

Изобретение относится к области медицины. Эндоскоп для продвижения внутри полостей организма содержит: гибкий корпус с элементами его перемещения, размещенную в передней части корпуса головку с расположенной в ней видеокамерой. При этом корпус выполнен в виде цепи подвижно соединенных между собой элементов, каждый из которых снабжен линейным двигателем. Каждый элемент перемещения гибкого корпуса выполнен в виде гибких пластин из упругого материала, равномерно расположенных по периметру на поверхности корпуса линейного двигателя, а концы каждой пластины закреплены на противоположных торцевых поверхностях линейного двигателя. В головке передней части корпуса размещен манипулятор с инструментом для проведения необходимых процедур лечения, а в хвостовую часть гибкого корпуса введен проводник для электрической связи с видеокамерой, манипулятором и линейными двигателями. Применение данного изобретения позволит повысить эффективность продвижения эндоскопа и уменьшить травматические воздействия на стенки сосудов и полости организма. 7 ил.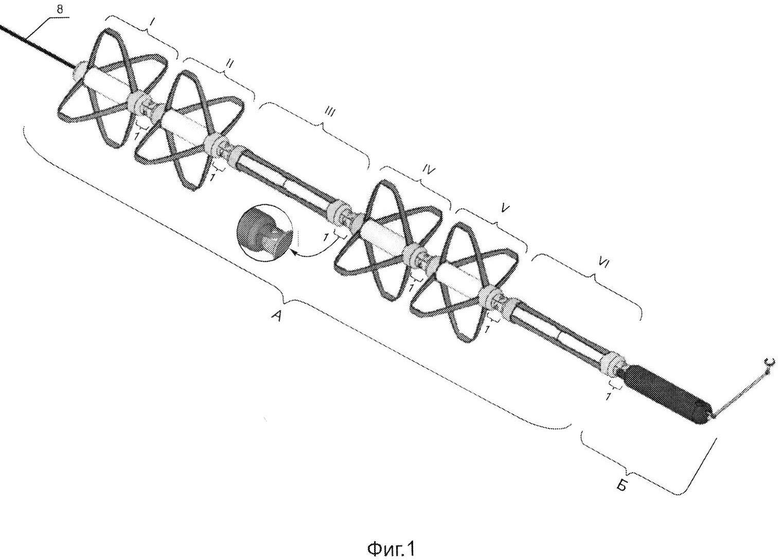
Эндоскоп для продвижения внутри полостей организма, содержащий гибкий корпус с элементами его перемещения, размещенную в передней части корпуса головку с расположенной в ней видеокамерой, отличающийся тем, что корпус выполнен в виде цепи подвижно соединенных между собой элементов, каждый из которых снабжен линейным двигателем, каждый элемент перемещения гибкого корпуса выполнен в виде гибких пластин из упругого материала, равномерно расположенных по периметру на поверхности корпуса линейного двигателя, а концы каждой пластины закреплены на противоположных торцевых поверхностях линейного двигателя, при этом в головке передней части корпуса размещен манипулятор с инструментом для проведения необходимых процедур лечения, а в хвостовую часть гибкого корпуса введен проводник для электрической связи с видеокамерой, манипулятором и линейными двигателями.
| ЗОНД И СПОСОБ ЕГО ПРОДВИЖЕНИЯ ВНУТРИ ПОЛОСТИ ТЕЛА (ВАРИАНТЫ) | 2000 |
|
RU2246891C2 |
| АППАРАТ, ПЕРЕМЕЩАЕМЫЙ ДАВЛЕНИЕМ В ПОЛОСТИ ТЕЛА | 2005 |
|
RU2346708C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2010 |
|
RU2506883C2 |
| WO 2009010828 A2, 22.01.2009. | |||

