Изобретение относится к технике калибровки поворотно-чувствительных устройств без движущихся масс и может быть использовано при разработке и изготовлении волоконно-оптических гироскопов (ВОГ).
Известен способ калибровки гироинерциальных измерителей бесплатформенной инерционной навигационной системы (БИНС) ориентации космического аппарата (см., патент РФ №2092402 с приоритетом от 27.05.1992, МПК: В64G 1/24), основанный на обработке измерений ошибок бесплатформенной системы ориентации, производимых с помощью системы астродатчиков перед и после каждого из трех плоских вращений космического аппарата, совершаемых вокруг его связанных осей на углы, не кратные 360°, например, 90° или 180°. В результате оценивают погрешности масштабных коэффициентов гироинерциальных измерителей, ошибки положения осей чувствительности и вызванную этим мультипликативную погрешность БИНС, алгоритм калибровки которой осуществляют с помощью бортового вычислительного устройства.
Предусматриваемая при использовании известного способа оценка и, соответственно, возможность компенсации мультипликативной погрешности БИНС позволяет повысить точность ориентации космического аппарата, однако реализация данного способа сопряжена со значительными техническими и вычислительными трудностями.
Наиболее близким аналогом - прототипом является способ калибровки чувствительных элементов бесплатформенной инерционной навигационной системы (БИНС) (см., например, патент РФ №2334947 с приоритетом от 26.03.2007 г., МПК: G01C 25/00), включающий определение масштабных коэффициентов датчиков угловых скоростей (ДУС) путем обработки их сигналов и сравнения полученной информации с информацией от датчиков углов.
Данный способ калибровки ДУС основан на использовании двухосного карданного подвеса БИНС и обеспечении специального расположения измерительных осей датчиков относительно осей этого подвеса, что технически выполнить достаточно сложно.
Задачей изобретения является разработка способа, обеспечивающего возможность сравнительно простого и эффективного определения масштабного коэффициента волоконно-оптического гироскопа.
Сущность изобретения состоит в том, что в предложенном способе получения масштабного коэффициента волоконно-оптического гироскопа (ВОГ), основанном на определении отношения величин интеграла выходного сигнала ВОГ и его углового перемещения, причем угловое перемещение ВОГ осуществляют в виде его колебательного движения с заданной угловой скоростью в пределах выбранного угла качания между двумя фиксированными положениями, при этом величину углового перемещения выбирают кратной величине угла качания, а величину интеграла выходного сигнала ВОГ определяют в виде интеграла модуля этого сигнала, усредненного по количеству периодов колебаний, продолжительность каждого из которых от момента начала и до конца периода определяют по моментам достижения фиксированных положений угла качания.
Кроме того, угол качания выбирают равным от 1 до 10 градусов, угловую скорость колебательного движения задают в диапазоне 1-15 градус/сек, а величину углового перемещения выбирают равной 1-10 величинам угла качания.
Технический результат от использования изобретения заключается в обеспечении возможности простого и эффективного определения масштабного коэффициента ВОГ.
На фиг.1 приведена схема образца устройства, изготовленного для апробации предлагаемого способа получения масштабного коэффициента волоконно-оптического гироскопа.
Здесь обозначено: 1 - основание; 2 - кривошип; 3 - сцепка; 4 - рычаг; 5 - платформа; 6 - волоконно-оптический гироскоп.
Способ получения масштабного коэффициента ВОГ осуществляют следующим образом.
С помощью кривошипа 2 (фиг.1), связанного с платформой 5, производят знакопеременные угловые перемещения установленного на этой платформе волоконно-оптического гироскопа 6, выполненного в виде катушки волоконного контура на базе одномодового поляризационно-устойчивого кварцевого волокна (см., например, патент РФ №2139499 с приоритетом от 05.03.1998 г., МПК: G01C 19/72) длиной 100 м с излучающим модулем в виде суперлюминесцентного диода типа СЛД-2-2 (см., например, http://www.mject-laser.ru/products/diodes) и с фотоприемным модулем - на основе бескорпусного фотодиода типа SSO-PDQ-0.25-5SMD (см., например, http://www.datasheetdir.com/SSO-PDQ-0.25-5+Photodiode). Диаметр катушки волоконного контура составлял -70 мм.
Величину масштабного коэффициента (МК) определяют из соотношения:
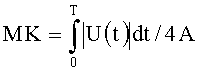
где U(t) - выходной сигнал ВОГ; А - угол поворота - параметр качающегося стола; 2А - угол качания от одного фиксированного положения до другого (см. фиг.1); Т - период угловых колебаний - измеряется по моментам перехода через ноль выходного сигнала (напряжения) U(t) ВОГ (моментам смены знака выходного сигнала ВОГ при достижении фиксированных положений).
В предлагаемом способе учтена специфическая черта ВОГ, связанная с его высоким быстродействием, позволяющая использовать выходной сигнал ВОГ для определения периода угловых колебаний без применения дополнительной аппаратуры.
Для реализации способа требуется регистрация (интегрирование) выходного сигнала ВОГ. В образце устройства, изготовленного для апробации предлагаемого способа, регистрация выходного сигнала осуществлялась путем аналого-цифрового преобразования с последующим использованием компьютера (не показан) для интегрирования цифровых данных и определения моментов перехода выходного сигнала через ноль.
Угловое колебательное движение между фиксированными положениями может быть реализовано простыми средствами при малых габаритах устройства. При этом величину угла качания при реализации предлагаемого способа выбирают только из соображений конструктивной целесообразности, причем, чтобы избежать влияния нелинейности выходной характеристики датчика на точность измерений, максимальная угловая скорость не должна быть большой.
Заявляемый способ с положительным результатом опробован для углов качания в диапазоне от 1 до 10 градусов при максимальных угловых скоростях 1-15 град/сек.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 2012 |
|
RU2522147C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1998 |
|
RU2139499C1 |
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС | 1994 |
|
RU2080558C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2152001C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО МИКРОАППАРАТА (ЛМА) С ИНТЕГРАЛЬНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ИБИНС) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263283C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
Изобретение относится к технике калибровки поворотно-чувствительных устройств без движущихся масс. В способе получения масштабного коэффициента волоконно-оптического гироскопа (ВОГ) осуществляют угловое перемещение ВОГ в виде его колебательного движения с заданной угловой скоростью в пределах выбранного угла качания между двумя фиксированными положениями. При этом величину углового перемещения выбирают кратной величине угла качания, а величину интеграла выходного сигнала ВОГ определяют в виде интеграла модуля этого сигнала, усредненного по количеству периодов колебаний, продолжительность каждого из которых от момента начала и до конца периода определяют по моментам достижения фиксированных положений угла качания. Технический результат заключается в обеспечении возможности простого и эффективного определения масштабного коэффициента ВОГ. 2 з.п. ф-лы, 1 ил.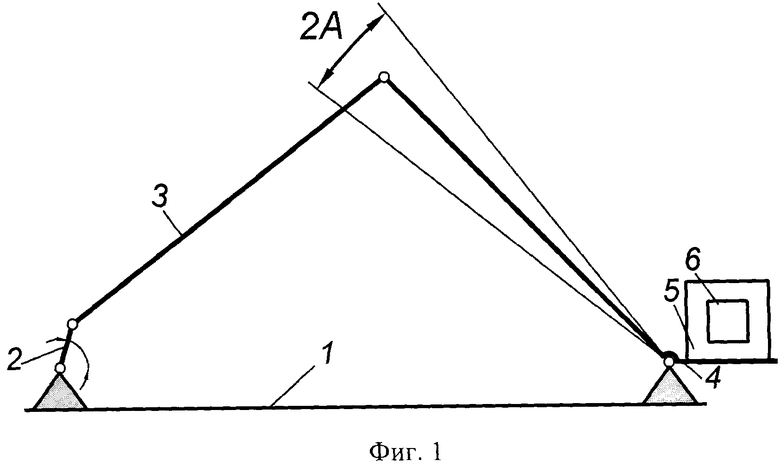
1. Способ получения масштабного коэффициента волоконно-оптического гироскопа (ВОГ), основанный на определении отношения величин интеграла выходного сигнала ВОГ и его углового перемещения, отличающийся тем, что угловое перемещение ВОГ осуществляют в виде его колебательного движения с заданной угловой скоростью в пределах выбранного угла качания между двумя фиксированными положениями, причем величину углового перемещения выбирают кратной величине угла качания, а величину интеграла выходного сигнала ВОГ определяют в виде интеграла модуля этого сигнала, усредненного по количеству периодов колебаний, продолжительность каждого из которых от момента начала и до конца периода определяют по моментам достижения фиксированных положений угла качания.
2. Способ получения масштабного коэффициента волоконно-оптического гироскопа (ВОГ) по п.1, отличающийся тем, что угол качания выбирают равным от 1 до 10 градусов, а угловую скорость колебательного движения задают в диапазоне 1-15 градус/сек.
3. Способ получения масштабного коэффициента волоконно-оптического гироскопа (ВОГ) по п.1 или 2, отличающийся тем, что величину углового перемещения выбирают равной 1-10 величинам угла качания.
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| US 6594020 B2, 15.07.2003, | |||
| JPH 10221088 A, 21.08.1998, | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |

