Область техники
Изобретение относится к области навигационных измерений и может быть использовано бесплатформенной навигационной системой (БИНС) для определения пилотажных и навигационных параметров для различного класса носителей - от авиационных до наземных.
Уровень техники
Из уровня техники известны БИНС, использующие малогабаритные блоки чувствительных элементов (БЧЭ) с «грубыми» и средней точности чувствительными элементами. Например, известная из патента РФ №2502049 (МПК G01C 23/00, опубл. 20.12.2013) малогабаритная бесплатформенная инерциальная навигационная система средней точности, корректируемая от системы воздушных сигналов, либо известная из патента РФ №2539140 интегрированная бесплатформенная система навигации средней точности для беспилотного летательного аппарата
Главная задача этих изобретений - повышение точности определения навигационных параметров движущегося носителя с малогабаритной БИНС в автономном режиме без использования постоянно обновляемых в реальном времени сигналов работающей спутниковой навигационной системы (СНС), но корректируемых по информации иной физической природы, т.е. от системы воздушных сигналов (СВС).
Оценивая составляющие скорости ветра по информации от СНС и запоминая их, по путевым скоростям возможно скорректировать инерциальную скорость БИНС в отсутствие истинных сигналов от СНС, например, при наличии активных радиопомех. В зависимости от параметров движения носителя может использоваться второй подход к коррекции, который предполагает использование разницы между соответствующими ускорениями, полученными от акселерометров и вычисленными по измерениям, полученным от СВС, как функции от воздушной скорости. Тогда появляется принципиальная возможность компенсирования Шулеровских колебаний инерциальной информации.
Основным ограничением использования такой коррекции БИНС является повышенный уровень погрешностей «шумящих» измерений ускорений, повышенный уровень погрешности оценки путевой скорости из-за нестабильности воздушной скорости, скорости ветра, хоть и запомненной в результате измерений СНС, и, тем более, первой производной от этих параметров. По мнению автора способа, «такой подход возможен только в том случае, когда ЧЭ имеют точности как минимум на уровне средней точности, и не может быть использован для низкоточных систем с «грубыми ЧЭ»». Однако на основании приведенных выше доводов очевидно, что такой подход весьма затруднителен и для прецизионных навигационных систем.
Из уровня техники также известен выбранный заявителем в качестве прототипа способ инерциальной навигации и устройство для его осуществления (патент РФ №2572403, МПК G01C 21/12, опубл. 10.01.2016). Известный способ не предполагает коррекцию системы по какой-либо корректирующей информации иной физической природы, а предполагает для увеличения общей точности некоторое изменение самой конструкции системы. В частности, способ предполагает компенсацию погрешностей основного блока акселерометров за счет погрешностей второго, дополнительно введенного блока акселерометров путем разворота чувствительных элементов второго блока до достижения максимума разности показаний акселерометров, приведенных к единой системе координат. Аналогично производится уменьшение погрешностей блока гироскопов. Таким образом, система является инерциальной навигационной мультисистемой, содержащей два навигационных вычислителя, два блока гироскопов, два блока акселерометров и систему управления пространственным положением блоков чувствительных элементов.
Основными недостатками известного решения является сложность, а значит, малая надежность такой навигационной системы, обусловленная наличием механических подвижных частей системы и блока управления их положением, а также сравнительно низкая точность определения пилотажных и навигационных параметров носителя.
Заявленное изобретение направлено на достижение технического результата в виде существенного повышения точности определения пилотажных и навигационных параметров носителя в автономном режиме работы БИНС, а также уменьшение сложности конструкции при использовании малогабаритных навигационных чувствительных элементов (гироскопов, акселерометров).
Раскрытие изобретения
Технический результат достигается тем, что способ определения пилотажных и навигационных параметров бесплатформенной инерциальной навигационной системой, основанный на использовании сигналов основных чувствительных элементов, включает измерение на борту движущегося объекта вектора удельной внешней силы в проекциях на оси приборного трехгранника, расчет матрицы направляющих косинусов между приборным и навигационным трехгранниками, пересчет вектора удельной внешней силы в проекции на оси навигационного трехгранника и интегрирование этих показаний для расчета текущих скоростей и координат в виде вектора относительной линейной скорости в осях навигационного трехгранника и вектора положения, при этом при вычислении матрицы направляющих косинусов используется абсолютная угловая скорость приборного трехгранника и абсолютная угловая скорость навигационного трехгранника, вычисляемая как функция от рассчитанных текущих скоростей и координат, причем при формировании измеренных сигналов абсолютной угловой скорости и удельной внешней силы осуществляется компенсация погрешностей этих сигналов для расчета пилотажных и навигационных параметров, при этом используются уточненные сигналы абсолютной угловой скорости и удельной внешней силы, сформированные при использовании дополнительных чувствительных элементов, общая ось чувствительности каждого из которых совпадает с осью чувствительности соответствующего ему основного чувствительного элемента, каждый измерительный блок дополнительных чувствительных элементов содержит «n» чувствительных элементов, измеряющих одну из трех ортогональных проекций своей векторной величины на оси приборного трехгранника, с технически допустимой частотой съема измеряемого сигнала посредством последовательных m-измерений, при этом на основании сигналов «m-1» измерений от совокупности дополнительных чувствительных элементов вычисляются корректирующие измерения как среднее значение измеренной векторной величины, находится невязка между корректируемыми и корректирующими измерениями посредством вычисления разности между упомянутым средним значением измеренной векторной величины и значением соответствующей векторной величины, измеренной основными чувствительными элементами, после чего посредством вычисления суммы упомянутой невязки и значения векторной величины, измеренной основными чувствительными элементами, формируется уточненный сигнал векторной величины пилотажных и навигационных параметров.
Технический результат также достигается тем, что бесплатформенная инерциальная навигационная система содержит гироинерциальную систему, связанную выходами с первым входом блока вычисления матрицы направляющих косинусов, а также с первым входом блока пересчета ускорений в проекции на оси навигационного трехгранника, соединенного вторым входом с выходом блока вычисления матрицы направляющих косинусов, а выходом с блоком вычисления скоростей, координат и измерения высоты, который соединен своим первым выходом со вторым входом блока вычисления матрицы направляющих косинусов, при этом упомянутая гироинерциальная система содержит блок основных чувствительных элементов в виде трех акселерометров и трех датчиков абсолютной угловой скорости, а также шесть измерительных блоков дополнительных чувствительных элементов в виде трех блоков акселерометров и трех гироблоков, ось чувствительности каждого из которых совпадает с осью чувствительности соответствующего ему чувствительного элемента блока основных чувствительных элементов в проекции на оси приборного трехгранника, при этом блок акселерометров включает по меньшей мере три акселерометра, блок коммутации, блок усреднения погрешности удельной силы, блок комплексной обработки информации и блок учета поправок по удельной силе, причем упомянутые по меньшей мере три акселерометра соединены входами с выходом блока коммутации, а выходами со входами блока усреднения погрешности удельной силы, связанного выходом с первым входом блока комплексной обработки информации, который вторым входом соединен с первым выходом акселерометра блока основных чувствительных элементов, а выходом с первым входом блока учета поправок по удельной силе, второй вход которого связан со вторым выходом упомянутого акселерометра, а выход со вторым входом блока пересчета ускорений в проекции на оси навигационного трехгранника; измерительный гироблок включает по меньшей мере три датчика абсолютной угловой скоростей, блок коммутации, блок усреднения погрешности угловой скорости, блок комплексной обработки информации и блок учета поправок по угловой скорости, причем упомянутые по меньшей мере три датчика абсолютной угловой скорости соединены входами с выходом блока коммутации, а выходами со входами блока усреднения погрешности угловой скорости, связанного выходом с первым входом блока комплексной обработки информации, который вторым входом соединен с первым выходом датчика абсолютной угловой скорости блока основных чувствительных элементов, а выходом с первым входом блока учета поправок по угловой скорости, второй вход которого связан со вторым выходом упомянутого датчика абсолютной угловой скорости, а выход с первым входом блока вычисления матрицы направляющих косинусов.
Сущность настоящего изобретения можно проиллюстрировать на частном примере обработки совокупности выходных измерений датчиков угловой скорости без потери общности полученных выражений и выводов.
Приведем анализ математической модели погрешностей датчиков угловой скорости (математические модели погрешностей акселерометров имеют тот же вид и те же слагаемые).
Уравнение идеальной работы датчика угловой скорости подчиняется соотношению:

где ω - абсолютная угловая скорость в проекции на ось чувствительности датчика;
к - коэффициент передачи, для идеального датчика он равен единице;
ωИЗМ - измеренное значение угловой скорости, в идеале он равен ω;
кω - коэффициент пропорциональности между угловой скоростью и выходным напряжением.
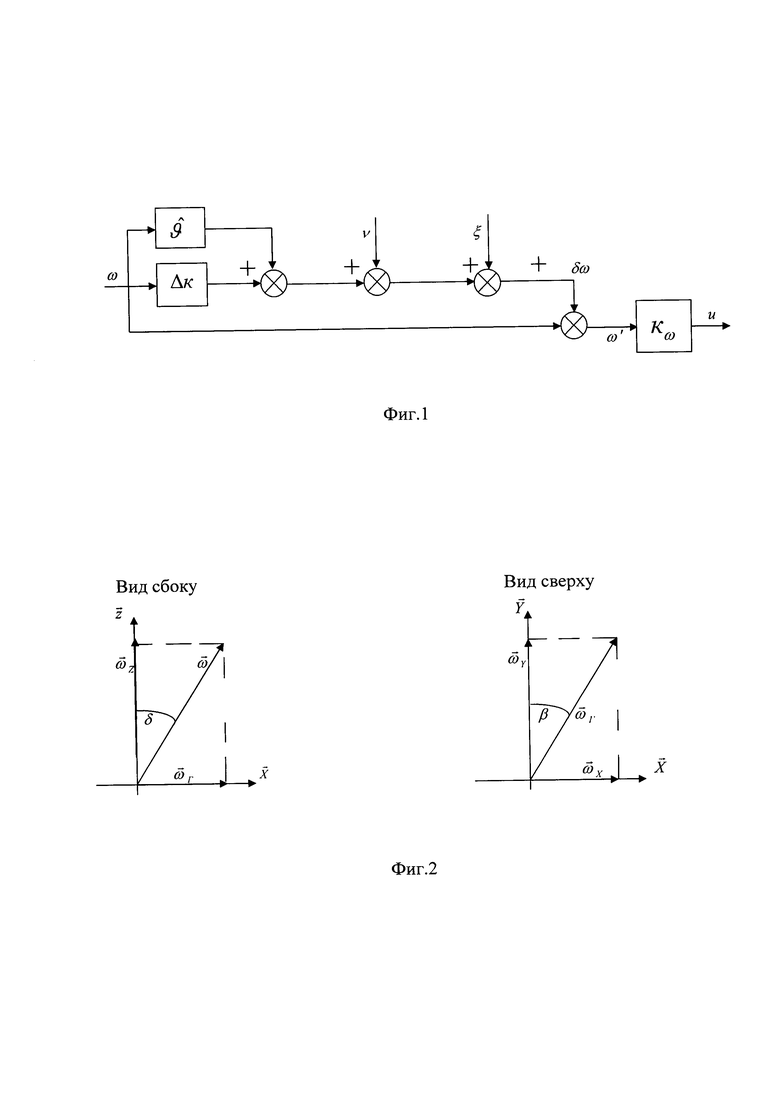
Однако в реальных датчиках существуют инструментальные погрешности измерений. Независимо от конкретной физики работы датчиков угловой скорости (электромеханический, оптический, микромеханический, электростатический и т.д.) его структурную схему с учетом погрешностей можно представить в следующем виде (см. Фиг. 1):

где  - кососимметрическая матрица, характеризующая угол несоосности оси чувствительности датчика и нормали к установочной плоскости, соответствующая погрешности измерения угловой скорости
- кососимметрическая матрица, характеризующая угол несоосности оси чувствительности датчика и нормали к установочной плоскости, соответствующая погрешности измерения угловой скорости  и соответствующая дополнительной проекции вектора угловой скорости на реальную ось чувствительности датчика;
и соответствующая дополнительной проекции вектора угловой скорости на реальную ось чувствительности датчика;
Δк - погрешность масштабного коэффициента измерителя;
ξi - i-ая реализация белого шума измерений угловой скорости;
νi - i-ая реализация систематической погрешности датчиков угловой скорости;
ω - идеальная угловая скорость переориентации БЧЭ в проекции на ось чувствительности датчика;
ω' - измеренное значение абсолютной угловой скорости.
Выражение (2) предполагает наиболее простую одномерную модель измерительной системы. Такое упрощение практически не отражается на общей модели погрешностей и, следовательно, на предлагаемой процедуре повышения эффективности гироблока. Для иллюстрации этого утверждения рассмотрим трехмерную систему на примере математической модели погрешностей, возникающих из-за наличия угла несоосности ϑ и погрешности масштабного коэффициента Δк.
Для определенности введем правый ортогональный приборный (связанный) трехгранник  , при этом ось
, при этом ось  направлена по правому крылу носителя,
направлена по правому крылу носителя,  - вдоль продольной оси,
- вдоль продольной оси,  - образует правый трехгранник (см. Фиг. 2). Здесь δ и β - углы, характеризующие направление вектора измеряемой угловой скорости относительно введенной системы координат.
- образует правый трехгранник (см. Фиг. 2). Здесь δ и β - углы, характеризующие направление вектора измеряемой угловой скорости относительно введенной системы координат.
Из Фиг. 2 следует:


 или
или 
Из (3) следует:

Допустим  . Тогда, с учетом (4), (5)
. Тогда, с учетом (4), (5)



В обозначениях математической модели погрешностей (2) проекция угловой скорости на ось чувствительности датчика по оси  равна ωZ. В соответствии с (6) погрешность определения угловой скорости, возникающая из-за несоосности, равна:
равна ωZ. В соответствии с (6) погрешность определения угловой скорости, возникающая из-за несоосности, равна:

Погрешность определения угловой скорости из-за неточного задания масштабного коэффициента в соответствии (3) равна:
 ; при этом
; при этом
В итоге мультипликативную составляющую погрешности можно представить (если вектор угла ϑ лежит в плоскости XOY перпендикулярно плоскости ZOX):

Для уменьшения уровня погрешностей или для общего удешевления стоимости гироблока малогабаритных чувствительных элементов без потери его точности настоящее изобретение предполагает использование «n» датчиков абсолютной угловой скорости. Эти датчики укреплены на едином жестком основании, измеряют одну из трех ортогональных проекций вектора абсолютной угловой скорости на коллинеарные оси чувствительности каждого из датчиков. Таким образом, получаются «n» независимых измерений одного и того же параметра. Средняя угловая скорость запишется в виде:

Пусть теперь выключится питание всего множества из «n» элементов и снова включится. Тогда через время готовности датчиков появится «n» новых измерений, погрешности которых (2) не зависят от предыдущих, иначе их можно было бы компенсировать после калибровки в стационарных условиях. Таким образом, в результате «m-1» переключений появится  измерений одного и того же параметра ω при наличии измерений некоррелированных погрешностей Δк и ϑ; ν и ξ типа белого шума.
измерений одного и того же параметра ω при наличии измерений некоррелированных погрешностей Δк и ϑ; ν и ξ типа белого шума.
В результате наличия "m-1" переключений и получения требуемого количества измерений от совокупности датчиков, образующих гироблок, находится среднее значение измеряемой скорости, т.е.:

Соотношение (11) - основная формула, характеризующая предлагаемый способ обработки измерений гироблоком.
С учетом (2) погрешность определения ωCP можно представить в следующем виде (обозначая Δki=ΔkZi cosδ; ϑi=ϑi sinδ):

Из равенства (12) следует:

Здесь QCP (ν, ξ) - дисперсия погрешности выходного сигнала гироблока, обусловленная изменяющейся от включения к включению систематической составляющей и шумовой составляющей собственных уходов; Vν - интенсивность шума от систематической составляющей собственных уходов, Vξ - интенсивность шумовой составляющей собственных уходов.
Дисперсия первого слагаемого (12):

Здесь QCP (Δк, ϑ) - дисперсия погрешности выходного сигнала гироблока, обусловленная погрешностями масштабных коэффициентов Δкi и углом несоосности осей чувствительности датчиков угловой скорости ϑi, ωi - измеряемая угловая скорость, в общем случае изменяющаяся от измерения к измерению, 2λ - коэффициент, связывающий дисперсию реального датчика угловой скорости с интенсивностью белого шума, ему соответствующего.
Из последнего равенства следует:

Здесь Vi - интенсивность белого шума масштабного коэффициента и угла несоосности i-го датчика.
Для расчета и моделирования непрерывных или дискретных стохастических процессов обычно полагают
 или
или 
Здесь λ - коэффициент затухания автокорреляционной функции реального стохастического процесса,  - дисперсии коэффициентов, указанные в паспортных данных на гироскоп, Δt - шаг съема информации цифровой системы.
- дисперсии коэффициентов, указанные в паспортных данных на гироскоп, Δt - шаг съема информации цифровой системы.
С учетом последнего равенства получим:

Из выражений (13) и (16) следует, что предложенный способ построения и обработки выходного сигнала гироблока уменьшает дисперсию его погрешности в раз в сравнении с дисперсией каждого из датчиков угловых скоростей, составляющих блок.
Как следует из анализа точностных характеристик гироблока в одномерном представлении (см. предыдущий раздел), обработка измерений в соответствии с соотношением (11) позволяет определить не мгновенное, а среднее значение за время получения «m-1» измерений. Кроме того, периодичность съема уточненного сигнала зависит от времени готовности измерения после очередного включения гироскопа. Основной датчик угловой скорости (гироскопический датчик), напротив, выдает измерение практически без запаздывания, но с погрешностью, превышающей погрешность среднего измерения. Для устранения указанных недостатков предложенный способ предусматривает комплексную обработку текущих измерений. При этом предполагается, что каждый уточненный сигнал «корректирует» выход основного гироскопического датчика  , соответствующего по времени
, соответствующего по времени  . Для этого в соответствии с (11) вычисляется среднее значение измерения при i=1…n для конкретного текущего значения «j=m»:
. Для этого в соответствии с (11) вычисляется среднее значение измерения при i=1…n для конкретного текущего значения «j=m»:

Находится невязка или, другими словами, «Калмановское измерение» Zj:

Примечание: далее для упрощения обозначений индекс "j" при «z» опускается.
С учетом математической модели погрешностей датчика (2) получим:

Разность (19) можно представить как линейную комбинацию элементов вектора состояния погрешностей основного датчика:

Для оценки вектора состояния погрешностей основного датчика:

возможно использование метода наименьших квадратов, наблюдающего устройства Льюинбергера и т.д.
Поскольку погрешности измерений имеют явно стохастический характер и элемент матрицы измерений ω может иметь явно нестационарный характер, способ использует процедуру оптимальной фильтрации Калмана (ОФК).
Рассмотрим трехмерную гиросистему, состоящую из трех одномерных систем, рассмотренных выше.
Математическая модель погрешностей гиросистемы в связанной системе координат  можно представить аналогично (2):
можно представить аналогично (2):

Выражение для измерений:

Здесь:
 - вектор измеренной угловой скорости;
- вектор измеренной угловой скорости;
 - идеальный вектор угловой скорости;
- идеальный вектор угловой скорости;
 - вектор собственных уходов;
- вектор собственных уходов;
 - вектор погрешности задания масштабных коэффициентов;
- вектор погрешности задания масштабных коэффициентов;
 - вектор малого угла погрешностей ориентации трехгранника
- вектор малого угла погрешностей ориентации трехгранника  ;
;
 - вектор белых шумов погрешностей гироскопов.
- вектор белых шумов погрешностей гироскопов.
Вектор состояния X и матрица измерений H примут следующий вид:

Матрица объекта размерностью 9×9:
А=0
Уравнения фильтра:

Здесь К(t) оптимальная матрица коэффициентов усиления невязки между измерениями Z и соответствующими оценками  ; Q - решение матричного уравнения Риккати; V0 - матрица интенсивностей шумов основного датчика; V - матрица интенсивностей остаточных шумов после совместной обработки «mn» измерений.
; Q - решение матричного уравнения Риккати; V0 - матрица интенсивностей шумов основного датчика; V - матрица интенсивностей остаточных шумов после совместной обработки «mn» измерений.
Получим условие наблюдаемости полного вектора состояния  на примере наблюдаемости параметров
на примере наблюдаемости параметров  . Для этого рассмотрим последнее, третье, измерение, соответствующее направлению по оси
. Для этого рассмотрим последнее, третье, измерение, соответствующее направлению по оси  в четыре момента времени т.е.:
в четыре момента времени т.е.:
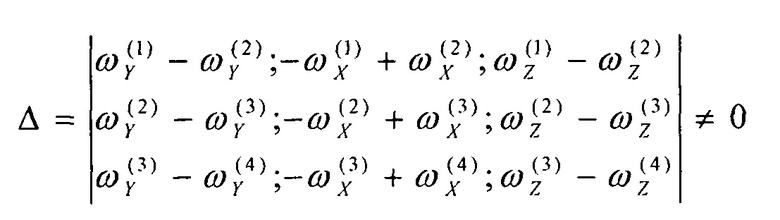
Для обеспечения наблюдаемости указанных параметров определитель этой системы не должен быть равен нулю, т.е.:

Приведенный определитель можно представить в виде определителя третьего порядка:
Для получения искомой зависимости введем обозначения:
Используя эти обозначения, получим:
Из последнего выражения следует, что для полной наблюдаемости указанных параметров необходимо непрерывное нелинейное изменение абсолютной угловой скорости  , например, по гармоническому закону. Это обстоятельство обусловливает наиболее эффективное использование предлагаемого способа при условии полной наблюдаемости вектора состояния на высокоманевренных носителях. В случае появления неполной наблюдаемости фильтр Калмана предполагает использование режима «Прогноз» по отношению к ненаблюдаемым параметрам до появления соответствующих достоверных измерений. Поэтому необходима организация работы фильтра в зависимости от динамики движения носителя.
, например, по гармоническому закону. Это обстоятельство обусловливает наиболее эффективное использование предлагаемого способа при условии полной наблюдаемости вектора состояния на высокоманевренных носителях. В случае появления неполной наблюдаемости фильтр Калмана предполагает использование режима «Прогноз» по отношению к ненаблюдаемым параметрам до появления соответствующих достоверных измерений. Поэтому необходима организация работы фильтра в зависимости от динамики движения носителя.
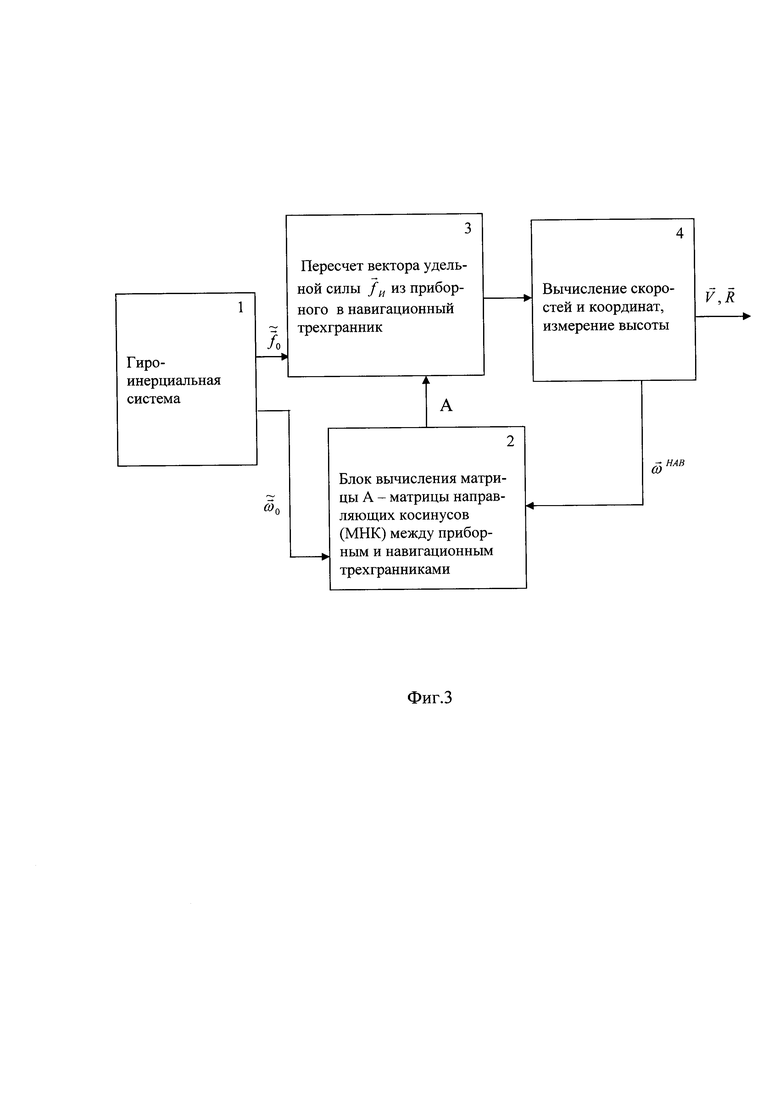
Сущность настоящего изобретения поясняется Фиг. 3 и Фиг. 4.
На Фиг. 3 приведена обобщенная блок-схема БИНС, реализующая предлагаемый способ, которая включает следующие функциональные элементы:
- блок гироинерциальной системы - 1;
- блок вычисления матрицы А направляющих косинусов - 2;
- блок пересчета вектора удельной внешней силы в проекции на оси навигационного трехгранника - 3;
- блок вычисления скоростей, координат и измерения высоты - 4.
В соответствии с Фиг. 3 Блок 1 содержит БЧЭ - измерители удельной внешней силы и абсолютной угловой скорости в проекциях на оси приборной системы координат (акселерометры, датчики угловых скоростей), а также функциональные элементы гироинерциальной системы, в соответствии с Фиг. 4, позволяющие посредством усредненных измерений корректировать измерения БЧЭ. Уточненные выходные параметры из Блока 1 поступают на входы Блока 2 и Блока 3. Блок 3 реализует процедуру определения матрицы направляющих косинусов А, связывающей навигационный и приборный трехгранники (в соответствии с известными методами решения матричного уравнения Пуассона). С помощью этой матрицы производится пересчет вектора удельной силы  (измеряемого акселерометрами) на оси навигационного трехгранника для дальнейшего расчета навигационных параметров в Блоке 3. Процедура определения матрицы А выполняется с использованием абсолютной угловой скорости приборного трехгранника
(измеряемого акселерометрами) на оси навигационного трехгранника для дальнейшего расчета навигационных параметров в Блоке 3. Процедура определения матрицы А выполняется с использованием абсолютной угловой скорости приборного трехгранника  , измеряемой датчиками угловой скорости (Блок 1). Матрица А вычисляется также с использованием абсолютной угловой скорости навигационного трехгранника
, измеряемой датчиками угловой скорости (Блок 1). Матрица А вычисляется также с использованием абсолютной угловой скорости навигационного трехгранника  , вычисляемой в Блоке 4, как функция от навигационных параметров. Информация об измеренном векторе в Блок 3 поступает из Блока 1. Блок 4 реализует уравнения движения материальной точки в поле сил тяготения под действием силы
, вычисляемой в Блоке 4, как функция от навигационных параметров. Информация об измеренном векторе в Блок 3 поступает из Блока 1. Блок 4 реализует уравнения движения материальной точки в поле сил тяготения под действием силы  (алгоритм вычисления навигационных параметров движения объекта). В результате получается вычисленный вектор относительной скорости
(алгоритм вычисления навигационных параметров движения объекта). В результате получается вычисленный вектор относительной скорости  и вектор положения
и вектор положения  .
.
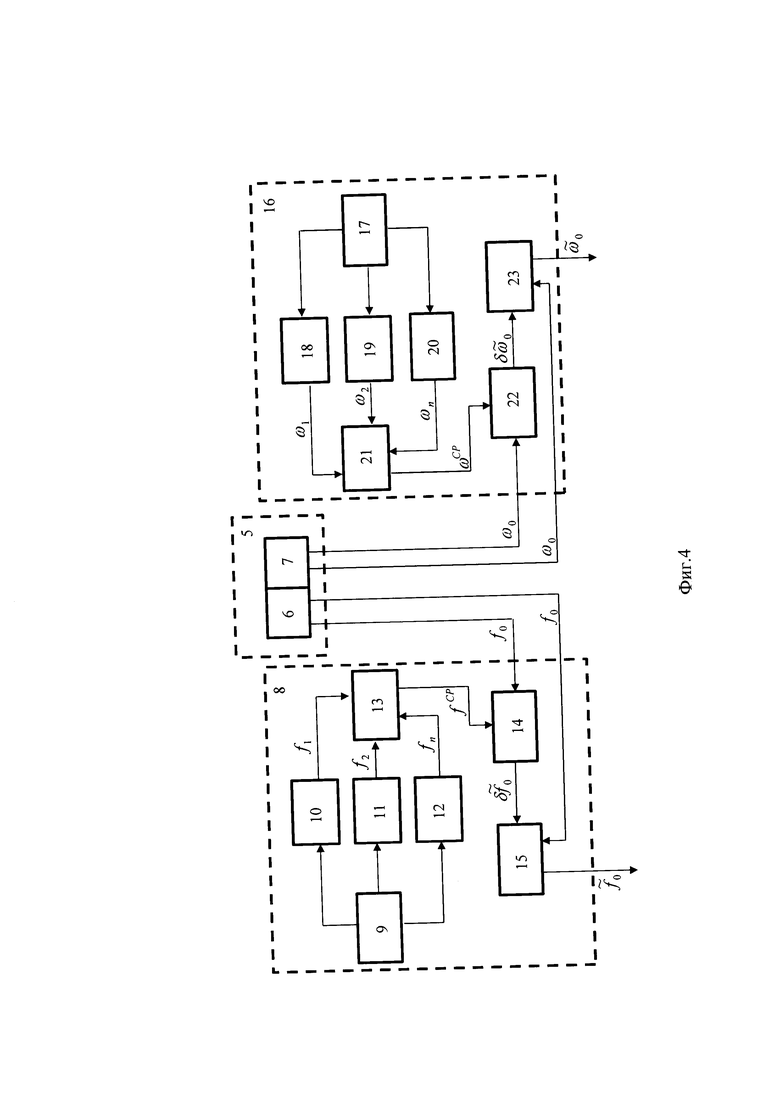
На Фиг. 4 приведена блок-схема формирования выходных измерений Блока 1 гироинерциальной системы в составе предлагаемой БИНС, представляющая одномерную, например, по оси z обобщенную блок-схему гироинерциальной системы. Оставшиеся два измерения связанной (приборной) системы координат (по осям x и y) предполагают использование аналогичной процедуры коррекции. Указанная блок-схема включает следующие функциональные элементы:
- блок основных чувствительных элементов (БЧЭ) 5, содержащий:
- акселерометр 6;
- датчик абсолютной угловой скорости 7;
- измерительный блок дополнительных чувствительных элементов 8, содержащий:
- коммутатор 9;
- первый акселерометр 10;
- второй акселерометр 11;
- n-й акселерометр 12;
- блок усреднения погрешности удельной внешней силы 13;
- блок комплексной обработки информации 14;
- блок учета поправок по удельной внешней силе 15;
- измерительный блок дополнительных чувствительных элементов 16, содержащий:
- коммутатор 17;
- первый датчик абсолютной угловой скорости 18;
- второй датчик абсолютной угловой скорости 19;
- n-й датчик абсолютной угловой скорости 20;
- блок усреднения погрешности угловой скорости 21;
- блок комплексной обработки информации 22;
- блок учета поправок по угловой скорости 23.
В соответствии с Фиг. 4 блок 5 - блок основных чувствительных элементов (БЧЭ) - измерителей вектора удельной внешней силы (акселерометра 6) и вектора абсолютной угловой скорости (датчика абсолютной угловой скорости 7) в проекциях на оси приборной системы координат. Эти измерения подлежат уточнению с помощью коррекции по дополнительным, более точным, измерениям в блоках дополнительных чувствительных элементов 8, 16. Для этого из блока 5 измерения чувствительных элементов 6, 7 поступают в блоки комплексной обработки информации - 14 и 22 соответственно. Более точные, корректирующие измерения в указанные блоки поступают из блоков усреднения погрешности - блока 13 и блока 21, усреднение производится в соответствии с выражением (18). Корректирующие измерения получаются в результате усреднения в блоке 13 показаний «nА» малогабаритных акселерометров 10, 11, 12 (измерителей удельной внешней силы), а также усреднения в блоке 21 показаний «nД» малогабаритных датчиков абсолютной угловой скорости 18, 19, 20, связанных выходами с соответствующими входами блоков 13, 21. При этом блок 12 соответствует одному из множества «nА» малогабаритных акселерометров, свыше двух, а блок 20 - одному из множества «nД» датчиков абсолютной угловой скорости, свыше двух. При этом входы акселерометров 10, 11, 12 связаны с коммутатором 9, а входы датчиков абсолютной угловой скорости 18, 19, 20 - с коммутатором 17, которые синхронно включают и отключают множество акселерометров и датчиков абсолютной угловой скорости.
Комплексная обработка измерений в блоках 14 и 22 производится в соответствии с выражениями (19), (24) (находится невязка между корректируемыми и корректирующими измерениями), матрица измерений (26) и уравнения фильтра (27). Выходы блока 14 и блока 22 связаны с соответствующими входами блока 15 учета поправок по угловой скорости и блока 23 учета поправок по удельной силе. Для организации учета поправок на вторые входы этих блоков поступают основные, уточняемые измерения от чувствительных элементов блока 5, т.е.:

Уточненные выходные параметры с выхода блока 15 поступают на вход блока 3 пересчета вектора удельной силы из приборного в навигационный трехгранник, а с выхода блока 23 - на один из входов блока 2 вычисления матрицы А направляющих косинусов (см. Фиг. 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ КОМПЛЕКС | 2016 |
|
RU2634083C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, КОРРЕКТИРУЕМАЯ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668659C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668658C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
Изобретение относится к области навигационных измерений и может быть использовано для определения пилотажных и навигационных параметров авиационных или наземных носителей, например летательного аппарата или автомобиля. Способ определения пилотажных и навигационных параметров бесплатформенной инерциальной навигационной системой (БИНС) заключается в том, что осуществляют компенсацию погрешностей блока основных чувствительных элементов (БЧЭ), входящего в «традиционный» состав БИНС. Компенсация производится за счет усреднения и учета измерений трех дополнительных гироблоков и блоков акселерометров, состоящих из "nД" гироскопических датчиков абсолютных угловых скоростей и "nА" акселерометров соответственно. При этом ось чувствительности основного датчика совпадает с общей осью чувствительности соответствующего ему измерительного блока и усреднением общего множества измерений. Производится коррекция основных датчиков БЧЭ по более точной информации от соответствующих «усредненных» блоков с оценкой и последующим учетом наблюдаемых составляющих математической модели погрешностей БЧЭ с привлечением процедуры Калмановской фильтрации. Для увеличения точности Калмановских измерений производится постоянное переключение этих блоков с технически допустимой частотой. Таким образом, устройство является инерциально-гироскопической мультисистемой, содержащей вычислитель, блок основных навигационных чувствительных элементов, в дополнение к ним три гироблока, три блока акселерометров. Технический результат - существенное повышение точности определения пилотажных и навигационных параметров носителя в автономном режиме работы инерциальной системы (ИНС) при использовании малогабаритных навигационных чувствительных элементов. 2 н.п. ф-лы, 4 ил.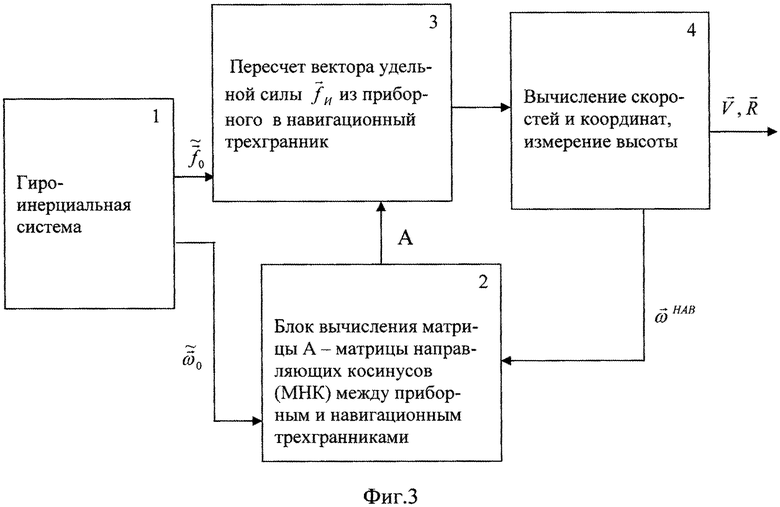
1. Способ определения пилотажных и навигационных параметров бесплатформенной инерциальной навигационной системой, основанный на использовании сигналов основных чувствительных элементов, характеризующийся тем, что включает измерение на борту движущегося объекта вектора удельной внешней силы в проекциях на оси приборного трехгранника, расчет матрицы направляющих косинусов между приборным и навигационным трехгранниками, пересчет вектора удельной внешней силы в проекции на оси навигационного трехгранника и интегрирование этих показаний для расчета текущих скоростей и координат в виде вектора относительной линейной скорости в осях навигационного трехгранника и вектора положения, при этом при вычислении матрицы направляющих косинусов используется абсолютная угловая скорость приборного трехгранника и абсолютная угловая скорость навигационного трехгранника, вычисляемая как функция от рассчитанных текущих скоростей и координат, причем при формировании измеренных сигналов абсолютной угловой скорости и удельной внешней силы осуществляется компенсация погрешностей этих сигналов для расчета пилотажных и навигационных параметров, при этом используются уточненные сигналы абсолютной угловой скорости и удельной внешней силы, сформированные при использовании дополнительных чувствительных элементов, общая ось чувствительности каждого из которых совпадает с осью чувствительности соответствующего ему основного чувствительного элемента, каждый измерительный блок дополнительных чувствительных элементов содержит «n» чувствительных элементов, измеряющих одну из трех ортогональных проекций своей векторной величины на оси приборного трехгранника, с технически допустимой частотой съема измеряемого сигнала посредством последовательных m-измерений, при этом на основании сигналов «m-1» измерений от совокупности дополнительных чувствительных элементов вычисляются корректирующие измерения как среднее значение измеренной векторной величины, находится невязка между корректируемыми и корректирующими измерениями посредством вычисления разности между упомянутым средним значением измеренной векторной величины и значением соответствующей векторной величины, измеренной основными чувствительными элементами, после чего посредством вычисления суммы упомянутой невязки и значения векторной величины, измеренной основными чувствительными элементами, формируется уточненный сигнал векторной величины пилотажных и навигационных параметров.
2. Бесплатформенная инерциальная навигационная система, характеризующаяся тем, что содержит гироинерциальную систему, связанную выходами с первым входом блока вычисления матрицы направляющих косинусов, а также с первым входом блока пересчета ускорений в проекции на оси навигационного трехгранника, соединенного вторым входом с выходом блока вычисления матрицы направляющих косинусов, а выходом с блоком вычисления скоростей, координат и измерения высоты, который соединен своим первым выходом со вторым входом блока вычисления матрицы направляющих косинусов, при этом упомянутая гироинерциальная система содержит блок основных чувствительных элементов в виде трех акселерометров и трех датчиков абсолютной угловой скорости, а также шесть измерительных блоков дополнительных чувствительных элементов в виде трех блоков акселерометров и трех гироблоков, ось чувствительности каждого из которых совпадает с осью чувствительности соответствующего ему чувствительного элемента блока основных чувствительных элементов в проекции на оси приборного трехгранника, при этом блок акселерометров включает по меньшей мере три акселерометра, блок коммутации, блок усреднения погрешности удельной силы, блок комплексной обработки информации и блок учета поправок по удельной силе, причем упомянутые по меньшей мере три акселерометра соединены входами с выходом блока коммутации, а выходами со входами блока усреднения погрешности удельной силы, связанного выходом с первым входом блока комплексной обработки информации, который вторым входом соединен с первым выходом акселерометра блока основных чувствительных элементов, а выходом с первым входом блока учета поправок по удельной силе, второй вход которого связан со вторым выходом упомянутого акселерометра, а выход со вторым входом блока пересчета ускорений в проекции на оси навигационного трехгранника; измерительный гироблок включает по меньшей мере три датчика абсолютной угловой скоростей, блок коммутации, блок усреднения погрешности угловой скорости, блок комплексной обработки информации и блок учета поправок по угловой скорости, причем упомянутые по меньшей мере три датчика абсолютной угловой скорости соединены входами с выходом блока коммутации, а выходами со входами блока усреднения погрешности угловой скорости, связанного выходом с первым входом блока комплексной обработки информации, который вторым входом соединен с первым выходом датчика абсолютной угловой скорости блока основных чувствительных элементов, а выходом с первым входом блока учета поправок по угловой скорости, второй вход которого связан со вторым выходом упомянутого датчика абсолютной угловой скорости, а выход с первым входом блока вычисления матрицы направляющих косинусов.
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| EP 1852681 A1, 07.11.2007 | |||
| US 20170160306 A1, 08.06.2017 | |||
| Фильтр для очистки газов и воздуха | 1988 |
|
SU1637840A1 |

