Изобретение относится к измерительной технике, а именно к средствам контроля датчиков угловой скорости (ДУС).
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание, имеющее возможность вращаться вокруг оси стенда и предназначенное для закрепления на нем контролируемого датчика угловой скорости, имеющего датчик угла, датчик момента, соединенные через усилитель обратной связи, электродвигатель привода стенда, редукцию, коллектор для подвода питания к контролируемому датчику угловой скорости [1].
В известном стенде, имеющем в качестве основы электромеханический поворотный стенд с редукцией, невозможно контролировать амплитудно-частотную (АЧХ) и фазово-частотную (ФЧХ) характеристики ДУС, также являющиеся основными контролируемыми техническими характеристиками.
При контроле АЧХ и ФЧХ электромеханических ДУС, имеющих обмотку имитации датчика момента, задаются не механические колебания основания вокруг оси чувствительности ДУС, как это имеет место в эксплуатации, а колебания гироузла вокруг оси прецессии, возбуждаемые генератором, подключенным к датчику момента ДУС. Имеет место, таким образом, неадекватность условия испытаний эксплуатационным. Контролировать же АЧХ и ФЧХ гироскопических приборов новых типов, таких как лазерные, волоконно-оптические, волновые твердотельные и ряд других не представляется возможным.
Кроме того, недостатками аналога являются:
1) недостаточная точность контроля масштабного коэффициента прецизионных ДУС вследствие погрешности и нестабильности задания стендом постоянной по величине и направлению угловой скорости;
2) низкая чувствительность стенда, т.е. невозможность точного задания малых угловых скоростей (0,01-0,1)°/c при аттестации прецизионных ДУС по масштабному коэффициенту;
3) возможность измерения масштабного коэффициента только при задании целого числа оборотов основания, т.е. по отношению к среднему значению угловой скорости;
4) при измерении масштабного коэффициента ДУС на части оборота основания нестабильность задаваемой угловой скорости вносит большие погрешности в результаты измерения, а необходимость задания целого числа оборотов удлиняет время контроля, особенно на малых скоростях;
5) невозможность задания от стенда гармонических колебаний вокруг оси чувствительности ДУС для контроля АЧХ, ФЧХ.
Известен стенд для контроля прецизионных датчиков угловых скоростей, содержащий основание для закрепления на нем с возможностью вращения вокруг измерительной оси стенда контролируемого измерителя угловой скорости с датчиками угла и момента, соединенными через усилитель обратной связи и расположенными по выходной оси датчика угловой скорости, коллектор подвода питания к контролируемому датчику угловой скорости, задатчик эталонного напряжения, сумматор и усилитель стабилизации, соединенные последовательно, фотоэлектрический муаровый датчик угла, расположенный на оси вращения стенда, фазовый интерполятор и блок преобразования информации фотоэлектрического датчика угла, соединенные последовательно блок преобразования информации датчика угловой скорости, электродвигатель постоянного тока, выполненный по бесконтактной схеме синусно-косинусного вращающего трансформатора, когда вход блока преобразования информации датчика угловой скорости и первый вход сумматора соединены с выходом усилителя обратной связи, а выход задатчика эталонного напряжения соединен со вторым входом сумматора, причем первый, второй и третий выходы усилителя стабилизации соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами усилителя стабилизации [6, 7, 10].
В известном стенде, построенном по аналогии с одноосным гироскопическим стабилизатором, и датчиком угловой скорости в качестве инерциального чувствительного элемента, где контролируемый ДУС одновременно является и чувствительным элементом, и испытуемым прибором, т.е. находится в режиме «самоконтроля», были достигнуты следующие положительные результаты по сравнению с ранее известными аналогами:
- чувствительность разработанного стенда, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента контролируемого ДУС, определялась не моментами трения на оси вращения стенда и коэффициентом трения в редукции, а моментами сопротивления на оси прецессии контролируемого ДУС, т.е. величиной на несколько порядков меньшей, чем в ранее известных технических решениях;
- повышение точности и стабильности задаваемой стендом угловой скорости обеспечивалось за счет наличия в предлагаемом стенде двухконтурной системы управления, что дало возможность за счет одного контура (системы обратной связи контролируемого ДУС) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижения необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока;
- использование самого контролируемого датчика угловой скорости в качестве чувствительного элемента стенда исключило необходимость введения в стенд собственных гироскопических чувствительных элементов, что повысило точность и стабильность задаваемой угловой скорости как постоянной по величине, так и гармонически изменяющейся, за счет исключения вибрационного взаимовлияния двух гироскопов, а также за счет того, что обеспечивалось практическое отсутствие сдвига фаз между выходной информацией ДУС (считываемой с выхода усилителя обратной связи) и выходной информацией о задаваемой угловой скорости (считываемой с информационного фотоэлектрического датчика угла), что делало результаты контроля величины масштабного коэффициента инвариантными к помехам, т.к. масштабный коэффициент есть отношение упомянутых информации и, если имела место помеха, то она содержалась в обеих информациях и исключалась в их отношении;
- использование фотоэлектрического муарового датчика угла в качестве информационного датчика стенда обеспечивало высокоточное измерение задаваемой угловой скорости, что и определило точные характеристики стенда;
- возможность контроля АЧХ и ФЧХ на стенде, т.е. расширение функциональных возможностей, обеспечивалось безредукторным исполнением привода и отсутствием возбудителей вибрационных взаимовлияний элементов стенда, искажающих задаваемые вокруг оси стенда гармонические колебания;
- стенд позволил производить измерение масштабного коэффициента ДУС при повороте его подвижной части вокруг оси стенда на любой угол (значительно меньший оборота), что сократило время испытания, без снижения точности контроля, как это имело место в ранее известных технических решениях.
Однако, несмотря на вышеприведенные достоинства, аналог не был свободен от недостатков, заключающихся в следующем.
1. Стенд был предназначен для контроля ДУС только одного типа, а именно электромеханических датчиков угловой скорости с электрической обратной связью, а испытания измерителей угловой скорости иного класса и принципа действия, таких как лазерные, волоконно-оптические, волновые твердотельные и др., на данном стенде были невозможны. Вместе с тем, проблемы, присущие испытанию электромеханических ДУС, упомянутые выше, присущи и всем остальным типам измерителей угловой скорости.
2. Стенд рассчитывался как единая двухконтурная система автоматического управления, т.е. «самоконтролю» могли подвергаться электромеханические измерители угловой скорости лишь одного типа с неизменной структурой регулятора. Контроль электромеханического ДУС другого типа с иной структурой регулятора требовал пересчета всей системы управления.
3. Фотоэлектрический муаровый датчик угла имел динамические ошибки, возрастающие при увеличении угловой скорости свыше 30°/с, таким образом, на стенде могли контролироваться электромеханические датчики угловой скорости ограниченного диапазона измерения угловых скоростей [13].
4. Стенд обладал аналоговой обратной связью, что исключало ее модернизацию без изменения элементной базы и структуры, а соответственно, в конечном счете, требовало разработки нового устройства при модернизации стенда.
5. Стенд имел возможность задания либо постоянных по величине и направлению, либо гармонически изменяющихся угловых скоростей, но не имел возможности задания их программным способом по любому требуемому закону.
6. ЭВМ в стенде являлась регистрирующим, но не управляющим устройством, что было обусловлено развитием вычислительной техники в момент подачи заявки на аналог и недостаточными ресурсами процессора, что значительно ограничивало возможности стенда.
Известен стенд для контроля измерителей угловой скорости, содержащий корпус; траверсу, закрепленную на корпусе с возможностью вращения; платформу, закрепленную на оси траверсы и предназначенную для закрепления на ней контролируемого прибора, который через преобразователь сигнала связан с управляющим компьютером, измерительный датчик угловой скорости, ось чувствительности которого совмещена с осью вращения траверсы, а по его выходной оси расположены датчики угла и момента, соединенные через систему обратной связи, содержащую предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности; датчик угла разворота траверсы, связанный через преобразователь сигнала с управляющим компьютером; двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; систему управления двигателем постоянного тока, содержащую устройство формирования разностного сигнала, предварительный усилитель и два усилителя мощности, при этом выход устройства формирования разностного сигнала соединен с первым входом системы управления двигателем; первый, второй и третий выходы системы управления двигателем соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами системы управления двигателем [6, 11].
К недостаткам, присущим прототипу [11], можно отнести следующее.
1. Недостатки по п.п.3-6, отмеченные выше в описании аналога [10], т.е. стенда для электромеханического ДУС, находящегося в режиме «самоконтроля».
2. Блок электроники представлял собой отдельное от стенда устройство, что усложняло конструкцию стенда и приводило к возникновению помех при передаче слабомощных сигналов в линиях связи.
Задачей изобретения является разработка стенда для контроля измерителей угловой скорости с цифровой системой управления двигателем стенда, обеспечивающего повышение точности контроля масштабного коэффициента измерителей угловых скоростей разных типов за счет повышения точности и стабильности задания стендом угловых скоростей, при обеспечении возможности контроля динамических характеристик ДУС за счет расширения функциональных возможностей стенда в части задания угловых скоростей, изменяющихся по любому закону, заданному программным способом, и высокоточного измерения угла поворота платформы во всем диапазоне задаваемых угловых скоростей.
Технический результат достигается тем, что в стенд для контроля измерителей угловой скорости, содержащий корпус; траверсу, закрепленную на корпусе с возможностью вращения; платформу, закрепленную на оси траверсы и предназначенную для закрепления на ней контролируемого прибора, который через преобразователь сигнала связан с управляющим компьютером, измерительный датчик угловой скорости, ось чувствительности которого совмещена с осью вращения траверсы, а по его выходной оси расположены датчики угла и момента, соединенные через систему обратной связи, содержащую предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности; датчик угла разворота траверсы, связанный через преобразователь сигнала с управляющим компьютером; двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; систему управления двигателем постоянного тока, содержащую устройство формирования разностного сигнала, предварительный усилитель и два усилителя мощности, при этом выход устройства формирования разностного сигнала соединен с первым входом системы управления двигателем; первый, второй и третий выходы системы управления двигателем соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами системы управления двигателем, с целью повышения точности контроля масштабного коэффициента измерителей угловых скоростей различных типов за счет повышения точности и стабильности задания стендом угловых скоростей, при обеспечении возможности контроля динамических характеристик датчиков угловых скоростей за счет расширения функциональных возможностей стенда в части задания угловых скоростей, изменяющихся по любому закону, заданному программным способом, и высокоточного измерения угла поворота платформы во всем диапазоне задаваемых угловых скоростей, введены аналого-цифровой преобразователь, трехфазный усилитель мощности, процессор, содержащий в том числе модуль широтно-импульсного формирования напряжения питания гиромотора, два цифроаналоговых преобразователя, порт ввода-вывода и вычислительное ядро с дополнительной периферией, при этом вход аналого-цифрового преобразователя соединен с выходом предварительного усилителя системы обратной связи измерительного датчика угловой скорости, а выход аналого-цифрового преобразователя - с первым входом порта ввода-вывода управляющего процессора, находящегося в режиме мультиплексного обмена с ядром, процессора, в котором реализованы алгоритмы цифрового управления измерительным датчиком угловой скорости и двигателем стенда, которое, в свою очередь, находится в режиме мультиплексного обмена с широтно-импульсным формирователем напряжения питания гиромотора, три выхода которого соединены с тремя входами трехфазного усилителя мощности, три выхода которого соединены с каждой из трех соответствующих обмоток трехфазного синхронного гистерезисного двигателя гиромотора; и двумя цифроаналоговыми преобразователями, встроенными в процессор, причем выход первого цифроаналогового преобразователя соединен с входом первого усилителя мощности, выход которого соединен с обмотками датчика момента измерительного датчика угловой скорости, а выход второго цифроаналогового преобразователя соединен со входом второго усилителя мощности, выход которого соединен с входом системы управления двигателем постоянного тока датчик положения - двигатель бесконтактный стенда. Фазочувствительный выпрямитель и корректирующий контур системы обратной связи измерительного датчика угловой скорости и устройство формирования разностного сигнала системы управления двигателем стенда реализованы алгоритмическим способом в управляющем процессоре. В качестве измерителя угла на оси вращения траверсы стенда применен угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены со вторым входом порта ввода-вывода процессора в системе управления стенда, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда. В качестве испытуемого прибора может применяться измеритель угловой скорости любого класса и принципа действия, выход которого через преобразователь сигнала соединен с входом управляющего компьютера, причем преобразователь сигнала представляет собой универсальное устройство, преобразующее информацию в виде аналогового сигнала или дискретного сигнала в код стандартного интерфейса используемого компьютера. Управляющий компьютер находится в режиме мультиплексного обмена с портом ввода-вывода управляющего процессора в системе управления стенда. Цифроаналоговые и аналогово-цифровые преобразователи могут быть как встроенными в процессор, работающий в обратной связи стенда, так и могут быть по отношению к нему внешними устройствами. Электронные блоки, процессорные модули и устройства преобразования сигнала реализованы в виде плат, крепящихся непосредственно на корпусе стенда.
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем.
1. Значительно сократить аналоговую элементную базу функциональной электроники в регуляторе стенда, что позволяет существенно уменьшить влияние смещений нулевых сигналов операционных усилителей на точностные характеристики стенда и, тем самым, обеспечить более высокую линейность и стабильность масштабного коэффициента стенда.
2. Дискретный регулятор, реализованный алгоритмически, позволяет производить модернизацию системы управления стендом путем пересчета собственных параметров по синтезированному алгоритму и расширяет функциональные возможности системы.
3. Фотоэлектрический муаровый датчик угла, имеющий высокие динамические погрешности при увеличении диапазона задаваемых угловых скоростей свыше 30°/с, заменен угловым энкодером, не имеющим подобных погрешностей, причем, если информация фотоэлектрического датчика угла после преобразования в интерполяторе фазовом и блоке преобразования информации обеспечивала цену углового разряда 0.31", то. угловой энкодер надежно функционирует при угловых скоростях в сотни оборотов в минуту и обеспечивает цену углового разряда после обработки электроникой 0.1"-0.005" в зависимости от типа энкодера, что позволяет значительно повысить точность измерения угла и угловой скорости стенда и обеспечивает возможность его использования в системе управления стенда.
4. Наличие в системе управляющего компьютера позволяет задавать стенду любые программные движения, а не только постоянные по величине и направлению и изменяющиеся по гармоническому закону.
5. Процессор, снабженный трехфазным 16-разрядным широтно-импульсным модулятором, позволяет синтезировать трехфазное напряжение питания синусоидальной формы для гиромотора измерительного ДУС, исключив из схемы традиционно используемые статические преобразователи, что обеспечивает снижение энергопотребления системы и ее габаритно-массовые характеристики.
6. Применение одного и того же процессора в обратной связи ДУС и системе управления двигателем стенда позволяет применять алгоритмы компенсации погрешностей без ошибок, обусловленных обменом между вычислительными устройствами.
7. Использование высокопроизводительного процессора с тактовой частотой десятки мегагерц с высокоточным таймером позволяет вычислять с высокой точностью угловую скорость стенда по информации углового энкодера, которая может вноситься в качестве поправки в управляющий сигнал измерительного датчика угловой скорости по мажоритарному принципу.
На фиг.1 представлены основные конструктивные элементы стенда. В корпусе стенда на шарикоподшипниках 1 подвешена траверса 2, ось вращения которой вертикальна. На траверсе 2 закреплена платформа 3, предназначенная для крепления испытуемого прибора 4. В траверсе 2 закреплен измерительный датчик угловой скорости 5, в качестве которого используется поплавковый гироскопический датчик угловой скорости (ДУС), включающий синхронный гистерезисный двигатель 6, помещенный в герметичную камеру (поплавок) 7, подвешенный на прецизионных камневых опорах 8, образующих ось прецессии, в корпусе ДУС 5. На оси прецессии закреплены датчик угла 9 и датчик момента 10, связанные через систему обратной связи ДУС 5. На оси вращения траверсы 2 закреплена подвижная часть двигателя постоянного тока ДП-ДБ 11, неподвижная часть которого размещена на корпусе стенда. На оси траверсы 2 закреплен диск углового энкодера 12, считывающие головки которого закреплены на корпусе стенда. На корпусе стенда в виде плат закреплена электронная часть системы управления стендом - блок управления (БУ).
В БУ входят:
- предварительный усилитель 13, вход которого соединен с выходом датчика угла 9 по оси прецессии измерительного ДУС 5, а выход которого соединен с входом аналого-цифрового преобразователя (АЦП) 14;
- АЦП 14, если выполнен как внешнее устройство, то представляет собой плату, на которой реализован преобразователь напряжения в код; плата входит в состав БУ. АЦП 14 может входить в состав процессора, например ADuC7026, TMS320LF2810 и т.п.;
- процессор 15, содержащий ядро с дополнительной периферией 16, порт ввода-вывода 17, два цифроаналоговых преобразователя ЦАП1 18 и ЦАП2 19, модуль широтно-импульсного формирования 20 напряжения питания гиромотора;
- трехфазный усилитель мощности 21, входы которого связаны с выходами ШИМ - формирователя 20, а выходы - с соответствующими обмотками трехфазного синхронного гистерезисного двигателя 6, являющегося гиромотором ДУС 5;
- два усилителя мощности УМ1 22 и УМ2 23, входы которых соединены соответственно с выходами ЦАП1 18 и ЦАП2 19, выход же усилителя мощности УМ1 22 соединен с обмотками датчика момента 10 измерительного ДУС 5, а выход усилителя мощности УМ2 23 - с обмотками ДП-ДБ 11.
Закрепление на платформе стенда плат, реализующих перечисленные блоки, позволяет сократить число линий коллектора, необходимых для питания и съема информации с ДУС-ЧЭ, что повышает точностные характеристики стенда. Это объясняется следующим:
- снижается момент трения от коллектора по оси вращения платформы, т.е. повышается стабильность задания угловой скорости;
- уменьшается длина линий электрических цепей от измерительного ДУС 5 до электронного блока системы управления, снижается уровень помех, поскольку не требуется передача маломощных сигналов через кольца коллектора.
Выход углового энкодера 12 соединен с входом первого преобразователя сигнала ПС1 24, выход которого соединен с портом ввода-вывода 17 управляющего процессора 15. Выход испытуемого прибора 4 соединен с входом второго преобразователя сигнала 25, выход которого соединен с портом ввода-вывода управляющего компьютера 26. Порт ввода-вывода управляющего компьютера 26 соединен шиной мультиплексного обмена с портом ввода-вывода 17 управляющего процессора 15; по шине мультиплексного обмена осуществляется обмен информацией между компьютером 26 и процессором 15.
Замена фотоэлектрического датчика угла на датчик угла фирмы REN-ISHAW - оптический угловой энкодер типа SIGNUM RESM 12 позволила повысить точность отсчета угла поворота платформы стенда и исключить динамические ошибки, вносимые фотоэлектрическим датчиком угла при угловых скоростях вращения платформы, превышающих 30°/с [13].
В датчик угла 12 фирмы RENISHAW, установленный в стенд, входят:
- кольцо типа RESM20 с нанесенными масштабными штрихами и встроенной нулевой меткой IN-TRAC™;
- две считывающие головки типа SR с кабелем;
- два интерфейса типа SIGNUM с разрешением лучше 0,2 мкм.
Кольцо RESM представляет собой цельное кольцо из нержавеющей стали, на боковую поверхность которого с интервалом 20 мкм нанесены масштабные штрихи и автофазирующая оптическая нулевая метка IN-TRAC™. Малые масса (порядка 100-200 г) и момент инерции кольца (около 2 г·см·с2), которое закреплено на траверсе 2, позволяют практически не ухудшить динамические характеристики траверсы с закрепленными на ней чувствительным элементом, платформой и испытуемым прибором.
Две считывающие головки SIGNUM закреплены на корпусе так, что угол между нулевыми метками составляет 180°. Измерение угла поворота платформы стенда происходит при считывании отраженного от масштабной шкалы сигнала с помощью системы RENISHAW SIGNUM, реализованной в считывающей головке. Расположение нулевых меток двух считывающих головок под углом 180° позволяет исключить влияние эксцентрисистета наружного диаметра кольца относительно оси вращения траверсы. Информация с выхода считывающих головок имеет стандарт типа RS-422 и вводится непосредственно в порт ввода-вывода 17 управляющего процессора 15 через стандартный интерфейс.
Замена фотоэлектрического датчика угла на оптический угловой энкодер фирмы RENISHAW 12 улучшает динамические характеристики системы управления стенда, повышает точность отсчета угла поворота платформы, а также улучшает технологичность и снижает трудоемкость изготовления стенда, т.к. исключается сложный технологический процесс обеспечения высоких требований к соосности подвижного и неподвижного лимбов фотоэлектрического датчика угла.
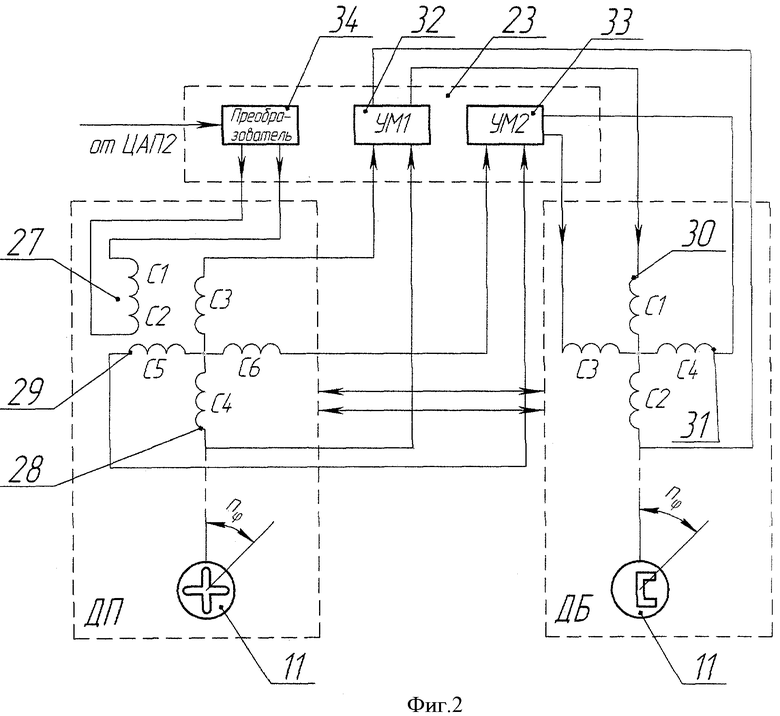
На фиг.2 представлена функциональная схема системы управления двигателем предлагаемого стенда. Неподвижные части датчика положения (ДП) и двигателя бесконтактного (ДБ) 11 соединены в одном корпусе, жестко закрепленном на корпусе стенда. Датчик положения (ДП) 11 представляет собой синусно-косинусный вращающий трансформатор с безобмоточным ротором (С1-С2 - обмотка возбуждения 27, С3-С4 - синусная обмотка 28, С5-С6 - косинусная обмотка 29). Двигатель постоянного тока бесконтактный 11 также имеет косинусную 31 и синусную 30 обмотки (С1-С2 и С3-С4) [4, 12].
Система управления (УМ2) 23 содержит преобразователь 34 и два идентичных каскада усилителя мощности - УМ21 32 и УМ22 33. Преобразователь 34 предназначен для модуляции и усиления постоянного сигнала, поступающего от ЦАП2 19, выполнен на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Каждый из усилителей УМ21 32 и УМ22 33 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью [4, 12].
Каскады УМ2 23 - УМ21 32 и УМ22 33 и двигатель ДП-ДБ 11 соединены следующим образом. Выход преобразователя 34 соединен с обмоткой возбуждения С1-С2 27 датчика положения ДП 11. Обмотка датчика положения С3-С4 28 соединена с входом каскада УМ21 32 усилителя мощности УМ2 23, а обмотка С5-С6 29 соединена с входом каскада УМ22 33 усилителя мощности УМ2 23. Выходы каскадов 32 и 33 УМ2 23 соединены соответственно с синусной и косинусной обмотками С1-С2 30 и С3-С4 31 двигателя ДБ 11.
Предлагаемый стенд (фиг.1, 2) работает следующим образом. С управляющего компьютера 26 в порт ввода-вывода 17 управляющего процессора 15 поступает код, пропорциональный задаваемому управляющему напряжению Uзад. Порт ввода-вывода 17, находящийся в процессе мультиплексного обмена с ядром процессора 16, пересылает данный код через ядро 16 во второй цифроаналоговый преобразователь (ЦАП 2) 19, встроенный в процессор, откуда соответствующее этому коду напряжение через второй усилитель мощности (УМ2) 23 поступает на датчик положения - двигатель бесконтактный (ДП-ДБ) 11. Двигатель ДП-ДБ 11 задает траверсе стенда 2 вращение с угловой скоростью, пропорциональной подаваемому управляющему напряжению Uзад. Поплавок 7 измерительного ДУС 5 - чувствительного элемента стенда, закрепленного стационарно на траверсе 2, начинает прецессировать и с его датчика угла 9 снимается переменное напряжение, пропорциональное заданной угловой скорости, которое подается на предварительный усилитель 13, откуда через АЦП 14 поступает в порт ввода-вывода 17 управляющего процессора 15. Сигнал, пропорциональный измеренной угловой скорости, в виде кода по каналу мультиплексного обмена поступает в ядро процессора 16, где в виде алгоритма запрограммирован цифровой регулятор измерительного датчика угловой скорости, обеспечивающий требуемые динамические характеристики измерительного ДУС 5 - чувствительного элемента стенда. Преобразовавшись в регуляторе, сигнал об измеренной ДУС 5 угловой скорости сравнивается с заданным значением угловой скорости, поступившем в виде входного воздействия по тому же каналу обмена через порт ввода-вывода 17 с управляющего компьютера 26, формируется разностный управляющий сигнал (реализуется алгоритмически операция, которую выполнял сумматор в прототипе), который поступает на вход цифрового регулятора системы управления двигателем, запрограммированного в виде алгоритма в ядре процессора 16 и обеспечивающего требуемые динамические характеристики системы управления стендом. Преобразованный управляющий сигнал в виде кода поступает на второй цифроаналоговый преобразователь (ЦАП 2) 19, встроенный в процессор 15, откуда в виде аналогового сигнала - на второй усилитель мощности (УМ2) 23, а оттуда - на ДП-ДБ 11. Вместе с тем, сигнал с ДУС 5, преобразованный в код, поступает из ядра 16 процессора 15 в первый цифроаналоговый преобразователь (ЦАП 1) 18, встроенный в процессор 15, а оттуда, преобразовавшись в аналоговый сигнал, - на первый усилитель мощности (УМ1) 22, а оттуда - в датчик момента 10 измерительного ДУС 5 - чувствительного элемента стенда, таким образом, реализуется обратная связь ДУС 5 в предлагаемом стенде. Как видно, реализуется двухконтурная цифровая система управления через один управляющий процессор 15, работающая по разностному принципу: как только разностный управляющий сигнал стремится к нулю, платформа 3 стенда вращается с заданной угловой скоростью. При подаче с управляющего компьютера 26 гармонического или любого другого сигнала, система работает аналогичным образом. В процессоре 15 ядро 16 находится в режиме мультиплексного обмена с модулем 20 широтно-импульсного формирования напряжения питания гиромотора, выходной сигнал с модуля 20 поступает на трехфазный усилитель мощности 21, а с него - на трехфазный синхронный гистерезисный двигатель 6 - гиромотор измерительного ДУС 5 - чувствительного элемента стенда. В ядре 16 процессора 15 запрограммирован алгоритм формирования ШИМ - управления трехфазным синхронным гистерезисным двигателем 6 измерительного ДУС, причем длительность импульсов на каждом из трех выходов изменяется по синусоидальному закону, фазовый сдвиг между формируемыми синусоидами составляет 120°.
С углового энкодера 12 через первый преобразователь сигнала (ПС1) 24 последовательность импульсов, число которых пропорционально углу поворота платформы стенда, поступает в порт ввода-вывода 17 управляющего процессора 15. В ядре 16 процессора 15 происходит вычисление угловой скорости стенда как отношения измеренного угла ко времени опроса, измеряемого таймером процессора 15. Использование таймера управляющего процессора, а не управляющего компьютера, связано с тем, что, как правило, в управляющем компьютере используются операционные системы, не являющиеся системами реального времени, а поэтому не обеспечивающие необходимую точность отсчета временных интервалов для вычисления угловой скорости стенда. Полученная информация по каналу мультиплексного обмена поступает в порт ввода-вывода 17, а оттуда - в управляющий компьютер 26. По тому же каналу поступает информация об угловой скорости, измеренной ДУС 5 - чувствительным элементом стенда. С испытуемого прибора (ИП) 4 через второй преобразователь сигнала (ПС2) 25 информация об измеренной угловой скорости поступает в управляющий компьютер 26, где происходит комплексная обработка полученных данных об угле и угловой скорости, заданной стендом и выходной информации, что позволяет формировать выходную информацию о масштабном коэффициенте и динамических характеристиках испытуемого прибора (в случае подачи на вход системы управления стендом гармонического сигнала).
Рассмотрим подробнее работу системы управления двигателем по разностному управляющему сигналу, сформированному в процессоре.
Система управления двигателем работает следующим образом. При появлении напряжения на обмотке С1-С2 27 датчика положения ДП 11 в его выходных обмотках С3-С4 28 и С5-С6 29 индуцируются напряжения:

где ϕ - относительный угол разворота ротора ДП 11 относительно статора, n - число пар полюсов. Эти напряжения усиливаются и корректируются каскадами усилителя мощности УМ2 23 - УМ21 32 и УМ22 33, после чего поступают на обмотки двигателя бесконтактного 11 C1-С2 30 и С3-С4 31. Суммарный момент, действующий на ротор двигателя ДБ 11, равен сумме моментов, развиваемых обеими обмотками ДБ.

где k - коэффициент крутизны характеристики двигателя ДБ, Фmax - максимальное значение магнитного потока, J - средняя величина тока в обмотках двигателя ДБ [4, 12].
Двигатель 11 работает по разностному сигналу, поступающему на вход преобразователя с выхода ЦАП2 19, встроенного в процессор 15, который отличен от нуля, если развиваемая стендом угловая скорость отличается по величине от заданной.
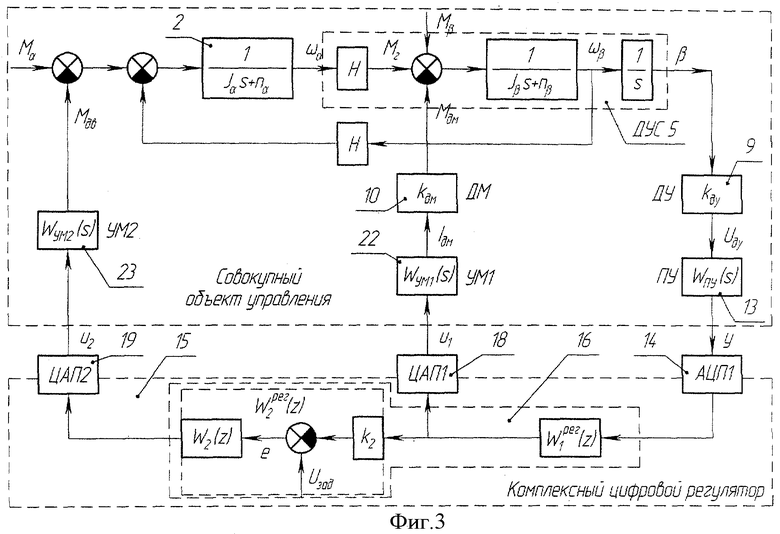
На фиг. 3 представлена структурная схема предлагаемого стенда, рассмотренного как аналого-цифровая система автоматического управления. Цифрами обозначены функциональные элементы системы в соответствии с обозначениями на фиг.1 и 2. Введены следующие обозначения:
Iα=100 г·см·с2 - момент инерции траверсы 2 стенда;
nα =40 г·см·с - момент скоростного демпфирования траверсы 2 стенда;
Iβ=0.286 г·см·с2 - момент инерции гироузла 7 измерительного ДУС 5 - чувствительного элемента стенда;
nβ=33 г·см·с - момент жидкостного демпфирования измерительного ДУС 5 - чувствительного элемента стенда;
Н=65 г·см·с - кинетический момент измерительного ДУС 5 - чувствительного элемента стенда;
 - коэффициент передачи датчика угла 9 измерительного ДУС 5 - чувствительного элемента стенда;
- коэффициент передачи датчика угла 9 измерительного ДУС 5 - чувствительного элемента стенда;
 - коэффициент передачи датчика момента 10 измерительного ДУС 5 - чувствительного элемента стенда;
- коэффициент передачи датчика момента 10 измерительного ДУС 5 - чувствительного элемента стенда;
 - оператор дифференцирования по Лапласу;
- оператор дифференцирования по Лапласу;
WУМ1(s) - передаточная функция первого усилителя мощности (УМ1) 22;
WУМ2(s) - передаточная функция второго усилителя мощности (УМ2) 23;
WПУ{s) - передаточная функция предварительного усилителя (ПУ) 13;
W1 рег(z) - дискретная передаточная функция корректирующего контура измерительного ДУС, реализованная алгоритмически в ядре 16 процессора 15;
W2 рег(z)=k2·W2(z) - дискретная передаточная функция корректирующего контура цепи управления стенда, реализованная алгоритмически в ядре 16 процессора 15, W2(z) - дискретная передаточная функция, k2 - коэффициент усиления корректирующего контура;
ωα - угловая скорость вращения платформы 3 стенда;
Мг=Н·ωα - гироскопический момент измерительного ДУС 5 - чувствительного элемента стенда;
Мβ - момент сопротивления, действующий по оси прецессии измерительного ДУС 5 - чувствительного элемента стенда;
Mдм=kдм·iдм - парирующий момент датчика момента измерительного ДУС 5 - чувствительного элемента стенда;
iдм - ток в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда, пропорциональный измеряемой угловой скорости;
ωβ - угловая скорость прецессии гироузла измерительного ДУС 5 - чувствительного элемента стенда;
β - угол прецессии гироузла 7 измерительного ДУС 5 - чувствительного элемента стенда;
Uду - переменное напряжение на выходе датчика угла 9 измерительного ДУС 5 - чувствительного элемента стенда;
y - напряжение на выходе предварительного усилителя 13 в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда;
u1 - управляющее напряжение с выхода ЦАП1 18 в цепи обратной связи измерительного ДУС 5 - чувствительного элемента стенда;
Uзад - задающее воздействие, поступающее в виде кода в порт ввода-вывода 17 управляющего процессора 15 от управляющего компьютера 26;
е - разностный сигнал ошибки управления;
u2 - управляющее напряжение с выхода ЦАП2 19 в цепи обратной связи стенда;
Мдв - момент, формируемый двигателем бесконтактным (ДБ) 11 стенда;
Мα - момент сопротивления по оси вращения траверсы 2 стенда.
При синтезе цифрового регулятора использовались методы LQD - оптимизации и цифровой фильтрации теории синтеза дискретных систем управления [5, 8, 9], а при синтезе корректирующих контуров аналоговой части системы управления стендом - методы классической теории автоматического управления [2, 3]. Численные значения параметров взяты как пример для реального образца стенда и измерительного ДУС 5. С учетом приведенных параметров передаточные функции системы управления стендом имеют вид:

передаточная функция усилителя мощности УМ1 22.

передаточная функция усилителя мощности УМ2 23,
где kум1=0.0337А/В - коэффициент передачи усилителя, Т1=0.0129 с, Т2=10-3 с - постоянные времени.

передаточная функция предварительного усилителя ПУ 13, где kny=36.54 - коэффициент передачи предварительного усилителя 13,
Тд=0.334·10-3 с - постоянная времени демодулятора, входящего в состав ПУ 13.
Дискретные передаточные функции цифрового регулятора для частот опроса 1 кГц и 2 кГц записываются в форме z - передаточных функций.
Для цепи обратной связи стенда:

где k2 - некоторый коэффициент передачи, выбираемый путем моделирования, необходимый для согласования установившегося значения угловой скорости платформы ωα с задающим напряжением Uзад, при Uзад=1 В, установившееся значение ωα(∞)=2.5 град/с достигается при k2=6.915, а наилучшее качество регулирования обеспечивается передаточной функцией регулятора


Для цепи обратной связи измерительного ДУС 5:


Данный регулятор записывается в форме «вход-выход», которая является наиболее рациональной при программной реализации в микропроцессоре 15. При этом в качестве примера рассмотрим регулятор для периода дискретности h=0.001 с (1 кГц). Данный регулятор можно представить следующими уравнениями:

где αj(z), βj(z) (j=1,2) - вспомогательные переменные. Тогда алгоритм вычисления управлений u1(i) и u2(i) на i-ом такте дискретности примет вид:
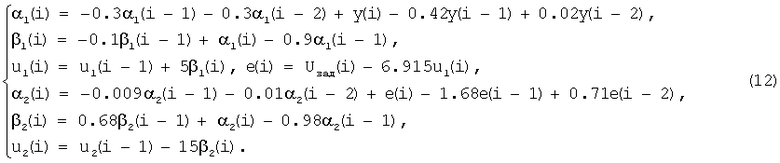
Начальные условия
y(-1), y(-2), α1(-1), α1(-2), β1(-1), u1(-1), e(-1), e(-2), α2(-1), α2(-2), β2(-1), u2(-1) принимаются нулевыми.
Данный алгоритм и программируется в ядро 16 процессора 15. Графики частотных характеристик и переходных процессов, полученных в результате математического моделирования, приведены на фиг. 4-11.
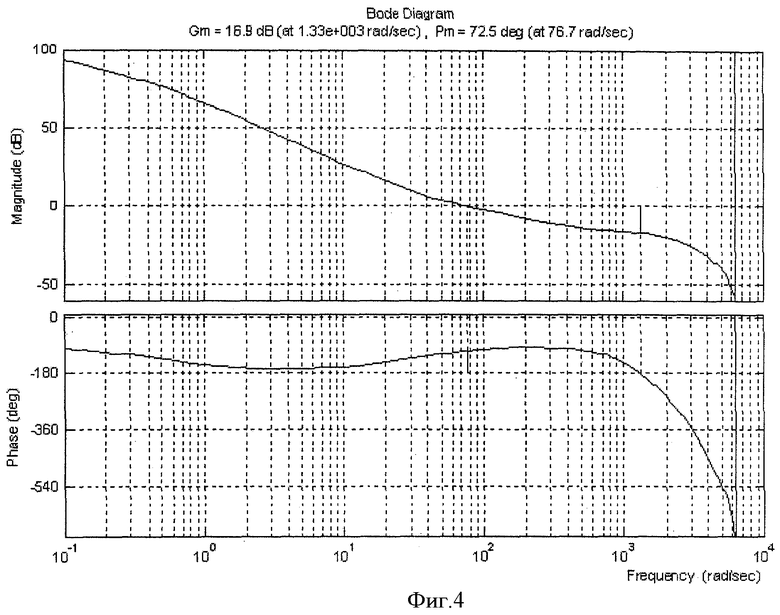
На фиг. 4 приведены АФЧХ разомкнутой системы (по управлению u2) предлагаемого стенда. Из графика видно, что запас по амплитуде и фазе составляют 17 дБ и 72° соответственно.
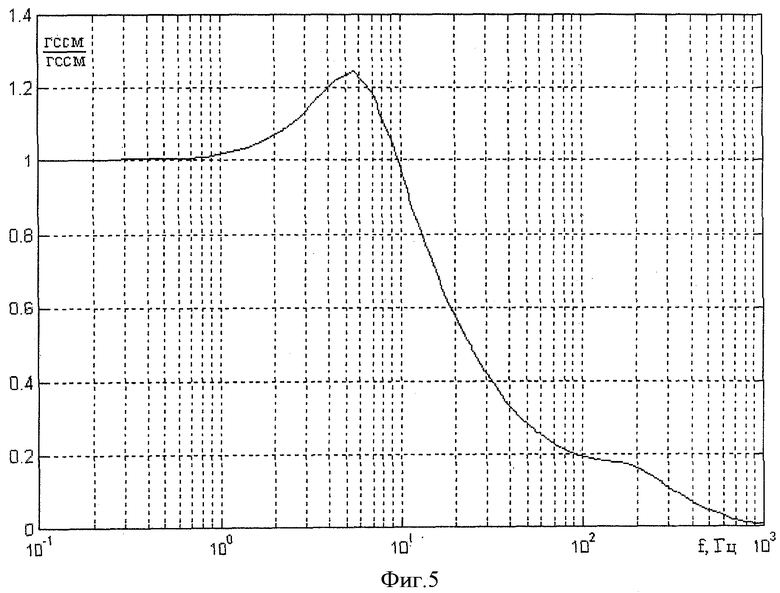
На фиг. 5 приведена АЧХ замкнутой системы  предлагаемого стенда. Видно, что показатель колебательности не превышает величины 1.25, а полоса пропускания - не ниже 15 Гц.
предлагаемого стенда. Видно, что показатель колебательности не превышает величины 1.25, а полоса пропускания - не ниже 15 Гц.
Частотные характеристики приведены для частоты опроса 1 кГц.
На фиг. 6 приведены переходные процессы по угловой скорости предлагаемого стенда при частоте опроса 1 и 2 кГц. Из графиков видно, что перерегулирование не превышает 32%, а время регулирования - величины 0.12 с. Установившееся значение угловой скорости при подаче на вход 1 В постоянного напряжения составляет 2.5 °/с.
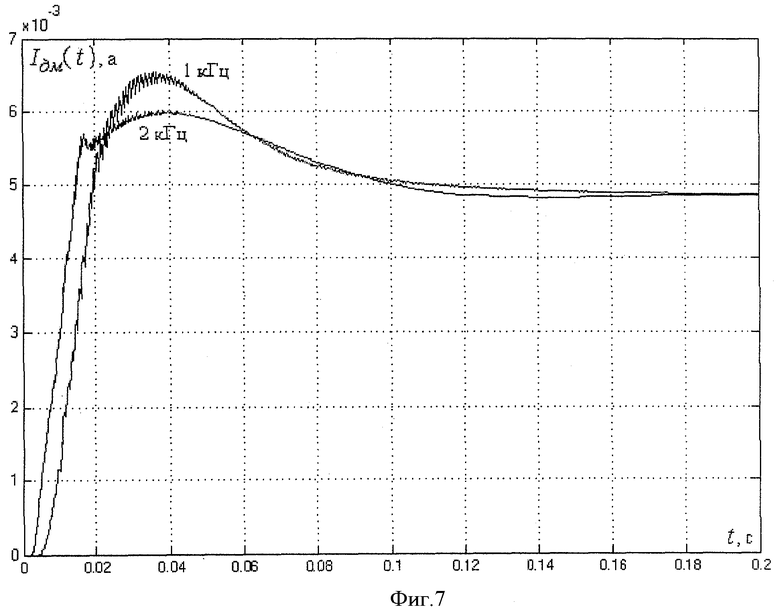
На фиг. 7 приведены переходные процессы по току датчика момента измерительного ДУС 5 - чувствительного элемента стенда. Из графиков видно, что перерегулирование не превышает 30%, а время регулирования - величины 0.12 с. Установившееся значение тока в цепи обратной связи ДУС при подаче на вход 1 В постоянного напряжения составляет 5 мА.
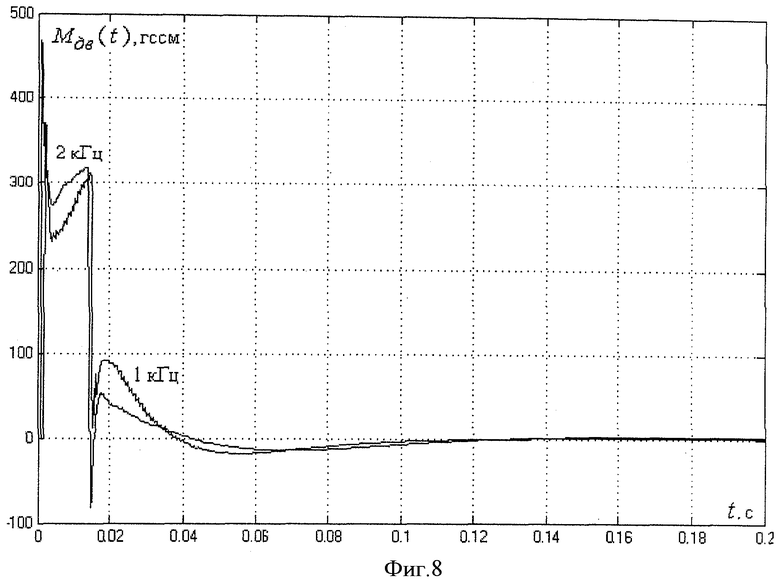
На фиг. 8 приведены переходные процессы по моменту двигателя предлагаемого стенда. Из графиков видно, что максимальная величина скачка момента не превышает 470 г·см, а время регулирования - величины 0.12 с. Переходный процесс по моменту двигателя сходится к нулю.
На фиг.9 приведены переходные процессы по управляющему воздействию u1 в цепи управления измерительного ДУС 5 - чувствительного элемента предлагаемого стенда. Из графиков видно, что перерегулирование не превышает 40%, а время регулирования - величины 0.14 с. Установившееся значение управляющего напряжения в цепи обратной связи ДУС 5 при подаче на вход 1 В постоянного напряжения составляет 0.15 В.
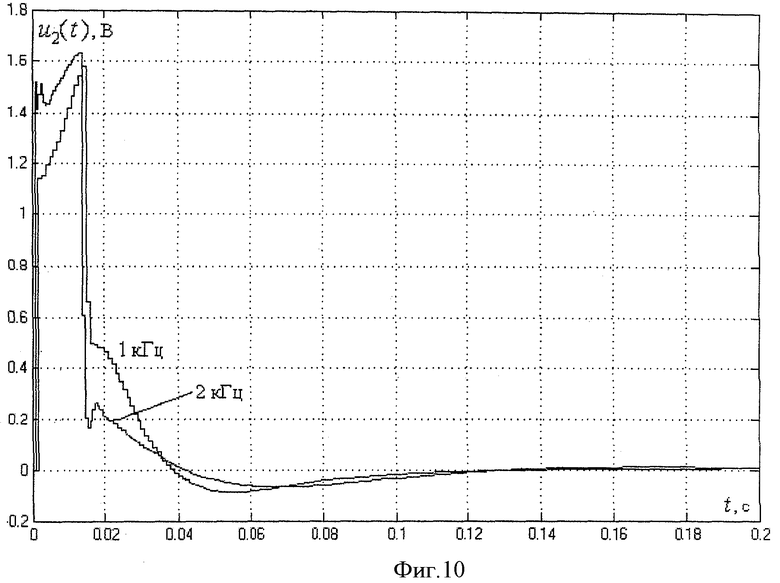
На фиг.10 приведены переходные процессы по управляющему воздействию u2 в контуре управления стендом. Из графиков видно, что максимальная величина скачка напряжения не превышает 1.4 В, а время регулирования - величины 0.12 с. Переходный процесс по управляющему напряжению сходится к нулю.
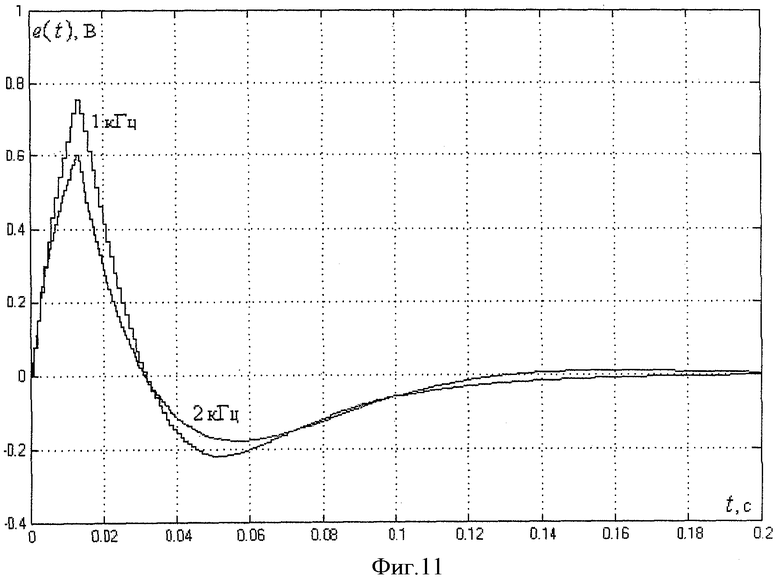
На фиг.11 приведены переходные процессы по ошибке управления стендом. Из графиков видно, что максимальная величина скачка напряжения не превышает 0.75 В, а время регулирования - величины 0.14 с. Переходный процесс по ошибке управления сходится к нулю.
Таким образом, предлагаемый стенд обладает следующими основными техническими характеристиками:
Литература
1. Авторское свидетельство СССР №476516, кл. G01Р 13/00, 1973.
2. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 767 с.
3. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
4. Высокоточные преобразователи угловых перемещений / Под ред. А.А.Ахметжанова. - М.: Энергоатомиздат, 1986.
5. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984. - 541 с.
6. Калихман Д.М. Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2001. - 336 с.
7. Калихман Д.М. Одноосное управляемое основание с датчиком угловой скорости в качестве чувствительного элемента, находящегося в режиме самоконтроля // Изв. вузов. Приборостроение. 2001. - №1, Т.44. - С.30-34.
8. Куо Б. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986. - 448 с.
9. Садомцев Ю.В. Конструирование систем управления с обратной связью по критериям точности и грубости. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2003. - 206 с.
10. Патент №2044274, приоритет от 27.05.1992. Стенд для контроля прецизионного гироскопического датчика угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И. (Россия). Зарегистрир. в Гос. реестре изобр. 20.09.95. // БИ 1995.
11. Патент №2075042, приоритет от 11.05.1993. Устройство для контроля датчиков угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И., Сновалев А.Я., Чурилин Ю.С. (Россия). Зарегистрир. в Гос. реестре изобр. 10.03.97. // БИ 1997.
12. Фабрикант Е.А., Журавлёв Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 248 с.
13. Фотоэлектрические преобразователи информации / Под ред. Л.Н.Преснухина. - М.: Машиностроение, 1974. - 375 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |


Изобретение относится к измерительной технике, а именно к средствам контроля датчиков угловой скорости (ДУС). Технический результат - повышение точности контроля масштабного коэффициента измерителей угловых скоростей разных типов. Для достижения данного результата использован принцип одноосного гироскопического стабилизатора с датчиком угловой скорости в качестве инерциального чувствительного элемента, работающего в режиме программного разворота. При этом реализована цифровая двухконтурная обратная связь. Процессор контура обратной связи управляет работой как двигателем стенда, так и измерительным датчиком угловой скорости чувствительного элемента стенда. В качестве двигателя по оси вращения стенда - датчик положения - двигатель бесконтактный, работающий по принципу синусно-косинусного вращающего трансформатора. Цифровые регуляторы реализованы на основе использования ядра управляющего процессора. 2 з.п. ф-лы, 11 ил.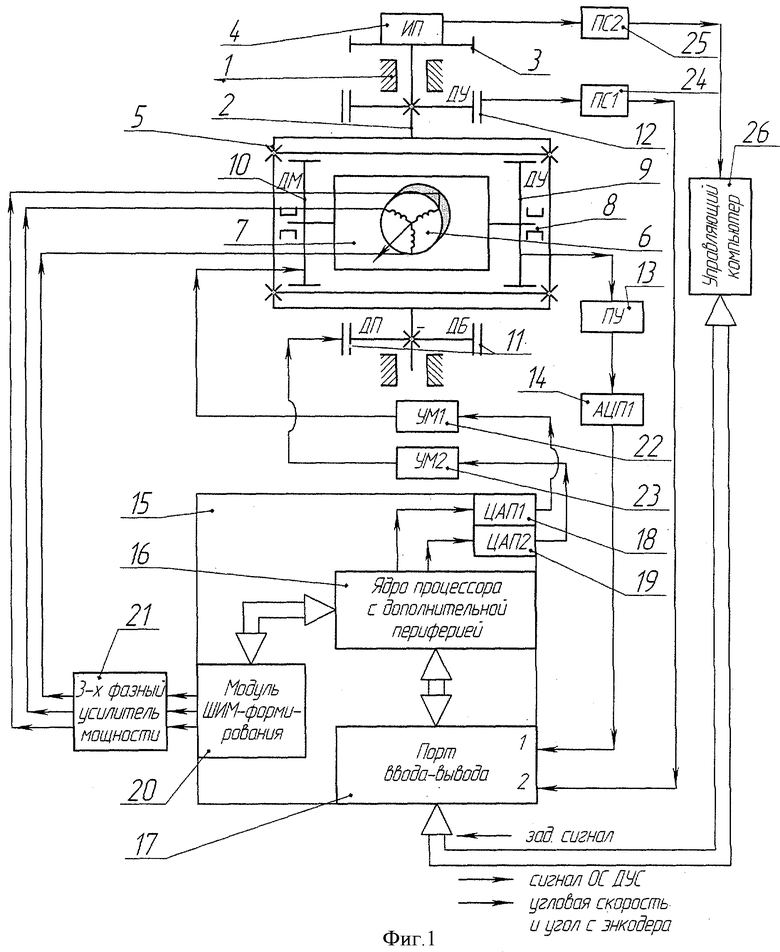
| RU 2075042 С1, 11.05.1993 | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Калихман Д.М | |||
| Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов | |||
| - Саратов: Изд.-во Сарат.Гос.Техн | |||
| Университета, 2001, с.336 | |||
| US 3883812 А, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

