Изобретение относится к системам формирования изображения, устанавливаемым на вращающемся основании и может быть использовано на вращающихся летательных аппаратах (ЛА) или на роторе гироскопа, стабилизирующего систему, а также в комплексах вооружения для наведения ракет на наземные и воздушные цели.
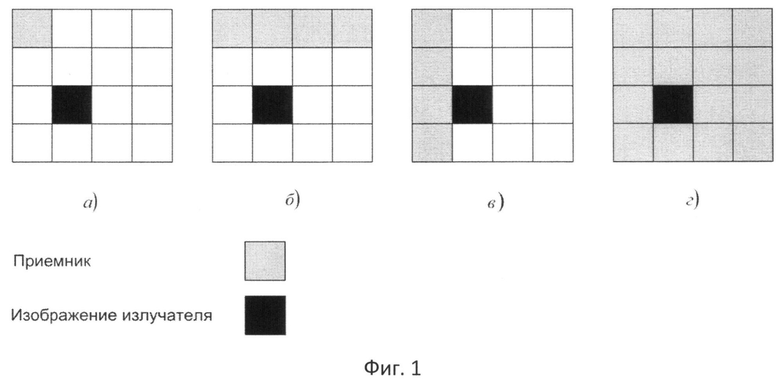
Известен способ сканирования поля яркости фотооптической системой (ФОС) с приемниками в ее фокальной плоскости, представленный в литературе: «Фотоприемные устройства и ПЗС», М.: Радио и связь. - 1992 [1]. Представленный в [1] способ классифицирован на примеры последовательного построчного обзора (Фиг.1а) и параллельного обзора (Фиг.1б, в) с помощью одноэлементного приемника.
Наиболее близким по своей технической сущности к предлагаемому изобретению является способ сканирования поля яркости, описанный также в [1] (Фиг.1г), в котором последовательно осуществляются следующие операции: прием излучения следящей за объектом ФОС с двумерным матричным приемником (ДМП), преобразование излучения в электрические сигналы, накопление сигналов с элементов ДМП, считывание сигналов и их обработка.
Известна ФОС для реализации способа сканирования поля яркости - патент №2425463 «Тепловизионный канал», опубл. 27.07.2011 г. ФОС содержит последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало и корректирующую линзу, размещенный в фокальной плоскости объектива ДМП и установленный на невращающемся основании, а также блок обработки сигналов с ДМП.
Отметим, что каждый пиксель ДМП принимает излучение от соответствующего ему условного элемента поля яркости. При этом оказывается возможным процесс накопления осредненных сигналов с элементов ДМП, а затем их считывание и обработка.
Однако для определенных конструкций, например, во вращающихся в полете ЛА ДМП вращается и возникает несоответствие между условными элементами поля яркости и ДМП и процесс накопления сигналов с ДМП разрушается.
Задачей предлагаемого изобретения является обеспечение соответствия между условными элементами поля яркости и ДМП.
Для решения поставленной задачи предлагается использовать способ сканирования поля яркости, который, как и наиболее близкий к нему, выбранный в качестве прототипа, включает прием излучения следящей за объектом ФОС с ДМП, преобразование излучения в электрические сигналы, накопление сигналов с элементов ДМП, считывание их и обработку.
В отличие от прототипа при приеме излучения от объекта ФОС при вращении ДМП вращают изображение поля яркости на частоте и в направлении вращения ДМП.
Предлагаемый способ сканирования поля яркости осуществляется с помощью ФОС, которая, как и прототип, содержит последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало и корректирующую линзу, установленный в фокальной плоскости объектива ДМП и блок обработки сигналов с ДМП.
В отличие от прототипа в объективе между главным зеркалом и корректирующей линзой установлена призма с приводом вращения, причем выход привода вращения соединен со вторым входом призмы, дополнительно установлен датчик угла вращения ДМП, связанный со вторым выходом ДМП, а между датчиком угла вращения ДМП и приводом вращения включен блок переноса сигнала на половинную частоту ДМП, привод вращения выполнен в виде последовательно соединенных фазового детектора, фильтра низких частот, двигателя постоянного тока и датчика угла вращения призмы, при этом первый (линейный) вход фазового детектора связан с выходом блока переноса сигнала на половинную частоту ДМП, а второй (управляющий) вход - с выходом датчика угла вращения призмы.
На Фиг.2 представлена функциональная схема ФОС.
1 - объектив;
2 - входное окно;
3 - главное зеркало;
4 - призма;
5 - корректирующая линза;
6 - ДМП;
7 - блок обработки сигналов ДМП;
8 - датчик угла вращения ДМП;
9 - блок переноса сигнала на половинную частоту ДМП;
10 - привод вращения;
11 - фазовый детектор;
12 - фильтр низких частот;
13 - двигатель постоянного тока;
14 - датчик угла вращения призмы.
Предлагаемый способ сканирования поля яркости осуществляется с помощью ФОС. Световой поток поля яркости ωП через объектив 1, а именно, через входное окно 2 поступает на главное зеркало 3 и, отразившись от него, попадает на призму 4, проходит через корректирующую линзу 5 и попадает на ДМП 6, установленный в фокусе объектива 1. Поток излучения, преобразованный ДМП 6 в электрические сигналы, поступает на блок обработки сигналов ДМП 7, в котором выделяется информация о координатах обнаруженного при поиске источника излучения. Сигнал с датчика угла вращения ДМП 8 поступает на блок переноса сигнала на половинную частоту ДМП 9, выход которого связан со входом привода вращения 10. Привод вращения 10 состоит из последовательно соединенных фазового детектора 11, фильтра низких частот 12, двигателя постоянного тока 13 и датчика угла вращения призмы 14. Причем, выход датчика угла вращения призмы 14 связан с управляющим входом фазового детектора 11.
Сущность изобретения заключается в том, что когда ФОС не вращается и поле яркости неподвижно, каждому элементу ДМП 6 условно соответствует элемент изображения в фокальной плоскости элемента поля яркости в пространстве предметов. Картина меняется, когда имеет место относительное перемещение поля яркости и ДМП 6. В частности, когда поле яркости неподвижно, а ДМП 6 вращается. При этом во вращающейся системе координат, связанной с ДМП 6, неподвижным является ДМП 6, а относительно него на частоте вращения координат перемещается элемент изображения поля яркости и искажается процесс накопления зарядов с ДМП 6. Возникает необходимость исключить относительное вращение элемента изображения поля яркости и соответствующего ему элемента вращающегося ДМП 6 в системе координат, связанной с ДМП. Для этого в оптическую схему ФОС введена призма 4, установленная на одном основании с ДМП 6. Однако при ее вращении синфазно с ДМП 6, изображение поля яркости будет вращаться с удвоенной частотой вращения призмы 4. Для устранения этого эффекта в ФОС введены последовательно соединенные датчик угла вращения ДМП 8, блок переноса сигнала датчика на половинную частоту ДМП 9 и привод вращения 10 призмы 4 вокруг ее продольной оси, обеспечивающий ее вращение на половинной частоте вращения ДМП 6 в направлении, противоположном направлению вращения ДМП 6.
Выходной сигнал Uп датчика угла вращения ДМП 8 может быть представлен в виде

Известно, что в соответствии с тригонометрическим тождеством

После преобразований получаем

где Uп=0,5(1+cosωпt).
Перенос сигнала на частоту 0,5 ωп происходит в блоке переноса сигнала на половинную частоту ДМП 9 в соответствии с (3) при очевидной последовательности действий над преобразованным в цифровую форму сигналом (1), реализуемого с помощью процессора.
Полученный в (3) сигнал, являющийся входным для привода вращения 10, поступает на линейный вход фазового детектора 11, на управляющий вход которого поступает подобный (3) преобразованный в цифровую форму аналоговый сигнал датчика угла вращения призмы 14. Выходной сигнал фазового детектора 11, пропорциональный фазовому сдвигу его входных сигналов, поступает на фильтр низких частот 12 и после преобразования в аналоговую форму - на двигатель постоянного тока 13, вращающей призму 4 с частотой 0,5 ωп.
Таким образом, вращение изображения поля яркости на частоте и в направлении вращения ДМП, позволяет обеспечить соответствие между условными элементами поля яркости и ДМП во вращающихся в полете ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКАНИРОВАНИЯ ПОЛЯ ЯРКОСТИ И ФОТООПТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524054C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР (ВАРИАНТЫ) | 2008 |
|
RU2395108C2 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| УСТРОЙСТВО ОПТИЧЕСКОЙ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ШЕРОХОВАТОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2400705C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2372640C1 |
| Устройство для дистанционного измерения тепловых деформаций оптических элементов | 1972 |
|
SU443250A1 |
| Устройство для записи киноизображения на кинопленку | 1982 |
|
SU1026110A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
Изобретение относится к системам формирования изображения, устанавливаемым на вращающемся основании. Способ сканирования поля яркости включает прием излучения объекта фотооптической системой (ФОС) с двумерным матричным приемником (ДМП), преобразование излучения в электрические сигналы, накопление сигналов с элементов ДМП, считывание их и обработку. При приеме излучения объекта ФОС при вращении ДМП осуществляют вращение изображения поля яркости на частоте и в направлении вращения ДМП. Способ сканирования поля яркости осуществляется с помощью ФОС, которая содержит последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало и корректирующую линзу, установленный в фокальной плоскости объектива ДМП и блок обработки сигналов с ДМП. В объективе между главным зеркалом и корректирующей линзой установлена призма с приводом вращения, причем выход привода вращения соединен со вторым входом призмы. Между дополнительно установленным датчиком угла вращения ДМП и приводом вращения включен блок переноса сигнала на половинную частоту ДМП. Технический результат: обеспечение соответствия между условными элементами поля яркости и двумерным матричным приемником во вращающихся в полете ЛА. 2 н.п. ф-лы, 2 ил.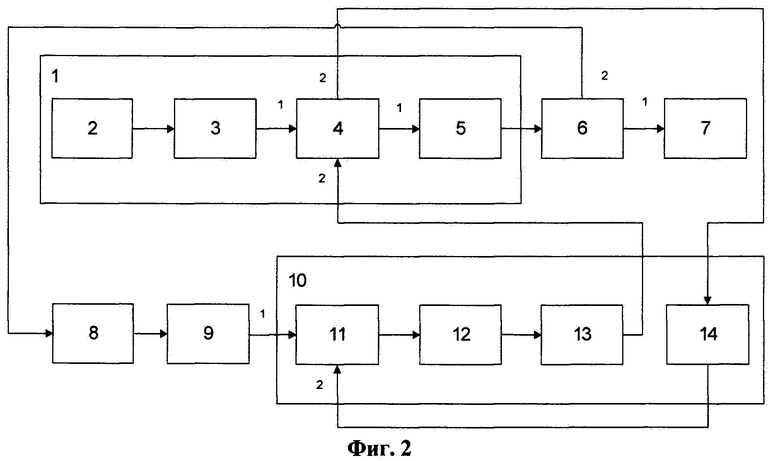
1. Способ сканирования поля яркости, включающий прием излучения фотооптической системой (ФОС) с двумерным матричным приемником (ДМП), преобразование излучения в электрические сигналы, накопление сигналов с элементов ДМП, считывание их и обработку, отличающийся тем, что при приеме излучения от объекта ФОС при вращении ДМП вращают изображение поля яркости на частоте и в направлении вращения ДМП.
2. ФОС для сканирования поля яркости, содержащая последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало и корректирующую линзу, установленный в фокальной плоскости объектива ДМП и блок обработки сигналов с ДМП, отличающийся тем, что в объективе между главным зеркалом и корректирующей линзой установлена призма с приводом вращения, причем выход привода вращения соединен со вторым входом призмы, дополнительно установлен датчик угла вращения ДМП, причем между датчиком угла вращения ДМП и приводом вращения включен блок переноса сигнала на половинную частоту ДМП, привод вращения выполнен в виде последовательно соединенных фазового детектора, фильтра низких частот, двигателя постоянного тока и датчика угла вращения призмы, при этом первый вход фазового детектора связан с выходом блока переноса сигнала на половинную частоту ДМП, а второй вход - с выходом датчика угла вращения призмы.
| ТЕПЛОВИЗИОННЫЙ КАНАЛ | 2010 |
|
RU2425463C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР (ВАРИАНТЫ) | 2008 |
|
RU2395108C2 |
| EP 696868 A1, 14.02.1996 | |||
| US 4984892 A, 15.01.1991 | |||

