Предполагаемое изобретение относится к системам формирования изображения, устанавливаемым на вращающемся основании, и может быть использовано на вращающихся летательных аппаратах (ЛА), в частности, комплексах вооружения для наведения ракет на наземные и воздушные цели.
Известен способ сканирования поля яркости фотооптической системой (ФОС) с вращающимся линейным матричным приемником (ЛМП), установленным либо на роторе гироскопа, стабилизирующего визирную ось ФОС, представленный в литературе: «Трехспектральный координатор для оптической головки самонаведения», Оптический журнал, 2002, №9 [1], либо на внутреннем кольце его карданного подвеса, вращающегося вместе с корпусом устройства, использующего ФОС - патент РФ №2197709 «Пассивная инфракрасная головка самонаведения вращающейся ракеты», опуб. 27.01.2003 г.[2]
Наиболее близким по своей технической сущности к предполагаемому изобретению является способ сканирования поля яркости, описанный в литературе: Справочник по инфракрасной технике «Проектирование инфракрасных систем». - М.: Мир, 1999, с.259 [3], в котором сканирование поля яркости осуществляется вращением его изображения вокруг визирной оси ФОС. При этом каждый из элементов ЛМП за период вращения «осматривает» кольцо поля яркости. Способ основан на вращении оптической системой изображения поля яркости, приеме и преобразовании ЛМП оптического излучения в электрические сигналы и их обработке.
При реализации вращения изображения в [3] рассматривается использование в оптической схеме призмы, вращающей световой поток с удвоенной скоростью вращения ее корпуса. Таким образом, объектив, реализующий способ ФОС, дополняется призмой с приводом вращения ее корпуса.
Отметим, что ФОС с ЛМП работает в двух режимах: в отсутствие вращения ЛМП и при его вращении. Например, в предстартовом режиме и после старта вращающейся ракеты. Очевидно, что значения чувствительности ФОС должны быть одинаковыми (близкими) в обоих режимах. Максимальное значение чувствительности зависит от минимально допустимой частоты обмена информацией, что соответствует, в свою очередь, минимально допустимому значению частоты вращения поля яркости относительно ЛМП.
Обозначим частоту вращения изображения поля яркости в режиме отсутствия вращения ЛМП через ωИ. При этом корпус призмы вращается с частотой ωП=0,5ωИ.
Обозначим частоту вращения ЛМП через ωЛМП. Примем, что в устройстве, в котором используется ФОС, при вращении ЛМП с той же частотой вращается и корпус призмы. При этом изображение поля яркости будет вращаться с частотой
ωВ=ωИ+2ωЛМП(1).
Это является недостатком прототипа, так как необходимо, чтобы
выполнялось условие
ωВ=ωИ+ωЛМП(2),
при котором частота вращения изображения поля яркости относительно ЛМП сохраняется равной частоте ωИ.
Задачей предполагаемого изобретения является расширение условий применения ФОС с ЛМП путем повышения чувствительности как в отсутствие, так и при вращении ЛМП.
Для решения поставленной задачи предлагается использовать способ сканирования поля яркости, который, как и наиболее близкий к нему, выбранный в качестве прототипа, включает вращение изображения поля яркости, прием и преобразование ЛМП оптического излучения в электрические сигналы и их обработку.
В отличие от прототипа при вращении ЛМП со скоростью ωЛМП вращают изображение поля яркости вокруг визирной оси ФОС со скоростью
ωВ=ωИ+ωЛМП,
где ωИ - скорость вращения изображения поля яркости при ωЛМП=0.
Предлагаемый способ, как и прототип, реализуется с помощью ФОС, содержащей последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало, призму и корректирующую линзу, установленный в фокальной плоскости объектива ЛМП блок обработки сигналов с ЛМП, а также привод вращения корпуса призмы, содержащий последовательно соединенные фазовый детектор, фильтр низких частот и двигатель постоянного тока, а также датчик угла вращения призмы, выход которого соединен с управляющим входом фазового детектора.
В отличие от прототипа в ФОС между вторым выходом ЛМП и входом привода вращения корпуса призмы включены последовательно соединенные датчик угла вращения ЛМП, делитель частоты сигналов на два и смеситель сигналов, ко второму входу которого подключен генератор сигналов с уставкой частоты 0,5ωИ.
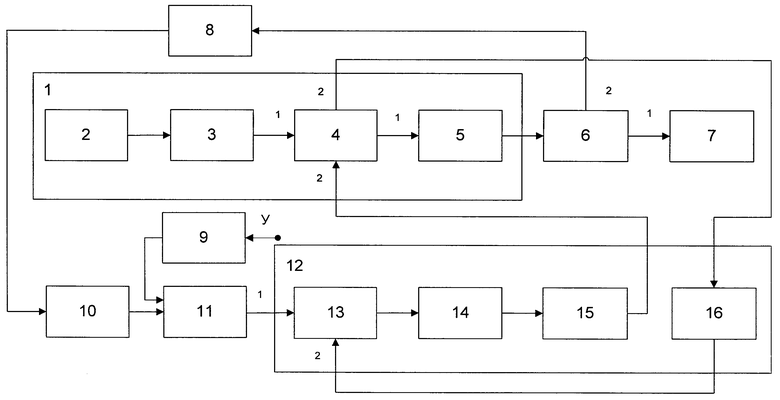
На Фиг. представлена функциональная схема ФОС.
1 - объектив,
2 - входное окно,
3 - главное зеркало,
4 - призма,
5 - корректирующая линза, 6-ЛМП,
7 - блок обработки сигналов ЛМП,
8 - датчик угла вращения ЛМП,
9 - генератор с уставкой,
10 - делитель частоты на два,
11 - смеситель сигналов,
12 - привод вращения,
13 - фазовый детектор,
14 - фильтр низких частот,
15 - двигатель постоянного тока,
16 - датчик угла вращения призмы.
Предлагаемый способ сканирования поля яркости осуществляется с помощью ФОС следующим образом.
Световой поток поля яркости через объектив 1, а именно через входное окно 2, поступает на главное зеркало 3 и, отразившись от него, попадает на призму 4, проходит через корректирующую линзу 5 и попадает на ЛМП 6, установленный в фокусе объектива 1. Поток излучения, преобразованный ЛМП 6 в электрические сигналы, поступает на блок обработки сигналов ЛМП 7, в котором выделяется информация о координатах обнаруженного при поиске источника излучения. Сигнал с датчика угла вращения ЛМП 8 поступает на делитель частоты на два 10 и далее на смеситель 11, второй вход которого связан с генератором сигналов 9 вращения изображения с частотой 0,5ωИ, соответствующей сигналу уставки У, а выход - со входом привода вращения 12. Привод вращения 12 состоит из последовательно соединенных фазового детектора 13, фильтра низких частот 14, двигателя постоянного тока 15 и датчика угла вращения призмы 16. причем выход датчика угла вращения призмы 16 связан с управляющим входом фазового детектора 13.
Сущность изобретения заключается в том, что, когда ЛМП не вращается и сигналы на выходе датчика угла вращения ЛМП 8 отсутствуют, обзор поля яркости производится путем вращения изображения поля яркости с помощью призмы 4 с приводом вращения 12, на входы которого поступают вырабатываемые генератором 9 сигналы
U1=UГ sin(0,5ωИt), U2=UГ cos(0,5ωИt), (3)
где UГ=const,
при этом на выходе датчика вращения призмы 16 формируются сигналы UДП1 и UДП2, аналогичные (3).
Выходной сигнал привода вращения 12 определяется выражением
UФД=k(U1 UДП1+U2 UДП2)=kUГ UДП=const, (4)
где k - масштабный коэффициент.
Выражением (4) обосновывается использование в приводе призмы двигателя постоянного тока или его аналога.
Необходимость уменьшения частоты вращения призмы 4 в два раза связано с тем, что частота вращения светового потока на выходе используемой призмы увеличивается вдвое.
Для обеспечения чувствительности ФОС при вращении ЛМП 6 на вход привода вращения 12 поступают сигналы, действующие на половинной величине суммарной частоты ωВ вращения изображения поля яркости ωИ, значение которой необходимо сохранить, и вращения собственно ЛМП ωЛМП, величину которой необходимо компенсировать. Компенсация достигается тем, что призма 4 дополнительно к частоте 0,5ωИ с помощью своего привода вращается, в том числе с частотой 0,5ωЛМП, в направлении, противоположном вращению собственно устройства, в котором используется ФОС.
Таким образом, задача расширения условий применения ФОС с ЛМП путем повышения чувствительности решается как в отсутствие вращения, так и при вращении ЛМП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКАНИРОВАНИЯ ПОЛЯ ЯРКОСТИ И ФОТООПТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516610C1 |
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1993 |
|
RU2077701C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2340922C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| Устройство для записи киноизображения на кинопленку | 1982 |
|
SU1026110A1 |
| Съемник координат для устройств считывания графической информации | 1985 |
|
SU1260983A1 |
| ТЕПЛОПЕЛЕНГАТОР | 2016 |
|
RU2604959C1 |
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
Изобретение относится к системам формирования изображения, устанавливаемым на вращающемся основании на летательных аппаратах (ЛА), в комплексах вооружения для наведения ракет на наземные и воздушные цели. Способ сканирования поля яркости фотооптической системой (ФОС) с линейным матричным приемником (ЛМП) включает вращение изображения поля яркости, прием и преобразование ЛМП оптического излучения в электрические сигналы и их обработку. При вращении ЛМП со скоростью ωЛМП вращают изображение поля яркости вокруг визирной оси ФОС со скоростью
ωВ=ωИ+ωЛМП,
где ωИ - скорость вращения изображения поля яркости при ωЛМП=0. ФОС содержит последовательно соединенные объектив, главное зеркало, призму, корректирующую линзу, ЛМП, блок обработки сигналов с ЛМП, а также привод вращения корпуса призмы, содержащий последовательно соединенные фазовый детектор, фильтр низких частот и двигатель постоянного тока, а также датчик угла вращения призмы. Изобретение позволяет расширить условия применения ФОС с ЛМП путем повышения чувствительности как в отсутствие, так и при вращении ЛМП. 2 н.п.ф-лы, 1 ил.
1. Способ сканирования поля яркости фотооптической системой (ФОС) с линейным матричным приемником (ЛМП), включающий вращение изображения поля яркости, прием и преобразование ЛМП оптического излучения в электрические сигналы и их обработку, отличающийся тем, что при вращении ЛМП со скоростью ωЛМП вращают изображение поля яркости вокруг визирной оси ФОС со скоростью
ωВ=ωи+ωЛМП,
где ωи - скорость вращения изображения поля яркости при ωЛМП=0.
2. ФОС для сканирования поля яркости, содержащая последовательно соединенные объектив, включающий установленные по ходу лучей входное окно, главное зеркало, призму и корректирующую линзу, установленный в фокальной плоскости объектива ЛМП блок обработки сигналов с ЛМП, а также привод вращения корпуса призмы, содержащий последовательно соединенные фазовый детектор, фильтр низких частот и двигатель постоянного тока, а также датчик угла вращения призмы, выход которого соединен с управляющим входом фазового детектора, отличающаяся тем, что между вторым выходом ЛМП и входом привода вращения корпуса призмы включены последовательно соединенные датчик угла вращения ЛМП, делитель частоты сигналов на два и смеситель сигналов, ко второму входу которого подключен генератор сигналов с уставкой частоты 0,5ωи.
| Справочник по инфракрасной технике, т.4, Проектирование инфракрасных систем, М., Мир,1999, с.259 | |||
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| Спектрофотометр с пространственным сканированием | 1977 |
|
SU976306A1 |
| ИНФРАКРАСНАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2011 |
|
RU2460085C1 |
| ТЕПЛОВИЗИОННЫЙ КАНАЛ | 2010 |
|
RU2425463C1 |
| JP 56019419 A, 24.02.1981 | |||
| CN 102297720 A, 28.12.2011 | |||

