Область техники, к которой относится изобретение
Изобретение относится к области транспорта, а именно к способам управления скоростью, положением в пространстве и направлением движения многоопорных колесных транспортных средств, реализующих схему бортового поворота. Техническое решение может быть использовано в алгоритмах управления движением транспортных средств и колесных платформ, которые входят в состав машин строительного, снегоуборочного, военного, космического и другого назначений.
Уровень техники изобретения
Известно многоопорное транспортное средство с бортовым поворотом по а.с. SU 1111926 (опубл. 07.09.1984 г. Бюлл. №33). Названное техническое решение снабжено независимыми электромеханическими приводами колес, в состав каждого привода входит тяговый электродвигатель, соединенный с источником питания, и двухступенчатая коробка передач с электромагнитным управлением, имеется также блок управления приводами, что является общепринятой функциональной схемой для транспортных средств такого рода, разработанных до появления микропроцессорных систем управления электроприводами (см., например, а.с. SU 910484, опубл. 07.03.1982 г. Бюлл. №9). Управление скоростью и поворотом, реализуемые такой схемой, является приблизительным аналогом патентуемого способа, полностью согласуется с выбранным прототипом (см. ниже) и осуществляется путем релейного управления независимыми приводами колес (вперед, назад, торможение, застопорено). Новизна аналога по а.с. SU 1111926 заключается в отключении питания средних колес шестиколесного транспортного средства в режиме поворота, с целью уменьшения энергозатрат при повороте. Недостатком аналога и всех способов, реализуемых техническими решениями, функционально подобными описанному в а.с. SU 1111926, является невозможность оптимального программного управления скоростью и траекторией движения транспортного средства, т.к. в его конструкции отсутствуют необходимые для этого элементы и функция управления может осуществляться только водителем. Недостатком аналога является также отсутствие непрерывного контроля электрической мощности, подводимой к каждому электродвигателю, и оптимального управления этой мощностью, в зависимости от мгновенных координат движения транспортного средства, что является необходимым условием повышения его экономичности.
Поскольку наиболее важными признаками патентуемого способа являются признаки, относящиеся к бортовому повороту, за прототип изобретения принимается первичное описание бортового поворота как способа, описание которого приведено на с.91 учебника «Г.А.Смирнов. Теория движения колесных машин. М.: Машиностроение. 1990, 352 с.». При бортовом повороте, как он описан в указанном источнике, механизмы поворота обеспечивают разные скорости наружных и внутренних колес относительно продольной оси транспортного средства. Различие в этих скоростях приводит к криволинейному движению, т.е. к повороту. Отмечается, что некоторые частные случаи реализации бортового поворота не реализуются другими способами. Так, если скорость колес одного борта машины равна нулю, а скорость колес другого борта отлична от нуля, то мгновенный центр бортового поворота лежит в плоскости невращающихся колес борта. Радиус поворота при этом равен половине колеи машины. Если же скорости колес левого и правого бортов одинаковы по абсолютной величине, но противоположно направлены, то мгновенный центр бортового поворота расположен в середине колеи и базы, радиус поворота равен нулю, т.е. машина разворачивается «на месте». Недостатком способа-прототипа является невозможность движения транспортного средства по заданной траектории с использованием хранящейся в памяти бортового компьютера цифровой карты и внутренних (инерциальных) средств топопривязки, поскольку, если функция управления бортовым поворотом не формализована, то она обязательно должна иметь обратную связь, замкнутую через координаты от внешней топопривязки, что реализуется на практике водителем или внешней топопривязкой по радиомаякам или же средствами системы космической навигации (GPS или Глонасс, см., например, описание к патенту RU 2298216). Указанный недостаток может оказаться весьма существенным при создании автономных автоматических самоходных средств, предназначенных для исследования иных планет или для военных целей.
Сущность изобретения
Изобретение имеет своей целью усовершенствование и приведение в соответствие с современным уровнем техники способа управления скоростью, положением в пространстве и направлением движения электрических и гибридных транспортных средств, в которых реализована схема бортового поворота. При использовании изобретения достигаются следующие полезные технические результаты:
1. Уменьшаются энергозатраты при повороте транспортного средства
2. Обеспечивается возможность такого режима вращения колес при замедлении движения транспортного средства, который препятствует заносу и потере управляемости.
3. Увеличивается маневренность транспортного средства, в т.ч. при разворотах на месте.
4. Обеспечивается возможность плоскопараллельного маневра.
5. Обеспечивается возможность движения транспортного средства по заданной траектории с использованием хранящейся в памяти бортового компьютера внутренней цифровой карты и внутренних (инерциальных) средств топопривязки.
Совокупность указанных технических результатов достигается тем, что в способе управления скоростью, положением в пространстве и направлением движения многоопорного транспортного средства, снабженного независимыми электроприводами колес, реализующем схему бортового поворота и заключающемся в том, что управлением обеспечивают одновременное изменение угловых скоростей вращения колес, каждому колесу придается угловая скорость вращения в соответствии с формулой:

Где ωi - угловая скорость i-го колеса
t - время
Δ - сигнал управления скоростью
Ψ - сигнал управления поворотом
ϖ=ϖ(Δ, t) - угловая скорость вращения любого из колес, как функция Δ и t при прямолинейном равномерном движении транспортного средства.
R=R(Ψ, t) задаваемый радиус поворота как функция Ψ и t
Yi - проекция расстояния от центра масс транспортного средства до центра i-го колеса на ось, направленную в сторону от центра поворота перпендикулярно плоскости колес и проходящую через центр масс транспортного средства.
Перечень фигур, чертежей и иных материалов изобретения
На Фиг.1 изображена кинематическая схема движения транспортного средства при повороте.
На Фиг.2 изображен качественный график функции Δ=Δ(t), обеспечивающий замедление движения на скользкой дороге по аналогии с антиблокировочной системой тормозов автомобиля.
На Фиг.3а изображен качественный график функции R=R(Ψ, t), обеспечивающей маневр транспортного средства при обгоне.
На Фиг.3б изображена траектория маневра транспортного средства при обгоне.
На Фиг.3в изображена схема осуществления маневра транспортного средства при обгоне.
На Фиг.4а изображен качественный график функции R=R(Ψ, t), обеспечивающей маневр транспортного средства при парковке.
На Фиг.4б изображена схема осуществления маневра транспортного средства при парковке.
Сведения, подтверждающие возможность осуществления изобретения
При повороте транспортного средства (Фиг.1) вокруг центра поворота S все его точки одновременно совершают поступательное движение со скоростью V и вращательное движение вокруг центра масс О с угловой скоростью W, причем
где
R - радиус поворота
V - скорость движения транспортного средства
Кинематическое разложение вектора скорости движения центра каждого из колес может быть представлено тангенциальной VOi и осевой VXi составляющими. Тангенциальная составляющая скорости движения центра каждого i-го колеса вокруг его центра масс О определяется из выражения

Где
Xi - проекция расстояния от центра масс О до центра i-го колеса на продольную ось, направленную параллельно плоскости колес в сторону движения транспортного средства и проходящую через центр масс О.
Yi - проекция расстояния от центра масс О до центра i-го колеса на ось, направленную от центра поворота S перпендикулярно плоскости колес, и проходящую через центр масс О.
Из треугольников скоростей (Фиг.1) осевые составляющие скорости движения центра каждого i -го колеса определяются выражениями
где 
Подставив (4) в (3) и (3) в (2), получим общую формулу для любого из колес

Скорость VXi движения каждого i-го колеса в направлении оси 
где D - диаметр колеса,
Подставив (5) в (6), получим

Как следует из формулы (7), когда R=±∞, т.е. при прямолинейном движении транспортного средства угловые скорости всех его колес одинаковы

Где ϖ - угловая скорость вращения любого из колес, соответствующая скорости V транспортного средства при его прямолинейном движении. Формула (7) с учетом (8) принимает вид.

При соблюдении условия (9) пробуксовки колес не происходит (смещение перпендикулярно плоскости колеса не является пробуксовкой), и за счет этого уменьшаются энергозатраты при бортовом повороте транспортного средства, т.е. достигается технический результат №1.
Транспортное средство, реализующее патентуемый способ управления движением, обязательно снабжено органом и/или программным устройством для управления скоростью, а также органом и/или программным устройством для управления поворотом. Как и во всяком транспортном средстве, посредством органа управления скоростью задается совокупная мощность P, в данном случае - электрическая мощность, подводимая к двигательной установке, поскольку существует баланс между этой мощностью и механической мощностью равномерного прямолинейного движения

где F - сила сопротивления равномерному движению
η - общий кпд электромеханического привода движения
Задание сигнала Δ управления скоростью может осуществляться перемещением органа управления скоростью, соединенного с датчиком перемещения и/или программным устройством. При этом задается совокупная электрическая мощность P, подводимая к двигательной установке в некоторой функциональной зависимости

Δ - сигнал управления скоростью
t - время
Отрицательное значение мощности в формуле (11) соответствует режиму рекуперативного торможения, в этом случае приводные электродвигатели работают в обращенном генераторном режиме, отдавая энергию в накопитель (аккумулятор). Подразумевается применение в качестве тяговых электродвигателей машин с жесткой механической характеристикой и системы электропривода, обеспечивающей автоматический переход в рекуперативный режим торможения при снижении величины, задаваемой электродвигателю скорости ниже его фактических оборотов (см., например, статьи «Тяговый электропривод в гибридных транспортных средствах» ч.1-4, в журнале Электронные компоненты №11, №12, 2009 г., №1, №4, 2010 г.).
С учетом этого, в соответствии с (10) и (11), управление мощностью задает величину ϖ, в зависимости от Δ и от времени t.

В простейшем случае это может быть, например, пропорциональная зависимость, в которую переменная t не входит
Где
К1 - коэффициент, характеризующий чувствительность устройства управления скоростью к сигналу управления Δ.
Для обеспечения режима торможения на скользкой дороге, т.е для достижения технического результата №2, при замедлении движения транспортного средства, сигнал Δ(t) управления скоростью задается как последовательность импульсов (Фиг.2), отвечающая уравнению

Δm - амплитуда сигнала управления скоростью
ТΔ - период следования сигнала управления скоростью
τΔ - длительность импульса сигнала управления скоростью
l(t) - единичная ступенчатая функция (функция Хевисайда).
Частное выражение (13) при таком управляющем сигнале также будет представлять собою последовательность импульсов и будет отвечать выражению

Соответствующий такому управлению, пульсирующий характер движущих моментов на колесах транспортного средства имеет сходство с пульсирующим действием антиблокировочной системы тормозов современного автомобиля. Очевидно, не исключены и другие виды функциональной зависимости (12), более эффективные с точки зрения обеспечения безопасности движения.
Задание сигнала Ψ управления поворотом может осуществляться посредством датчика перемещения органа управления поворотом и/или программным устройством. При этом задается радиус поворота R в функциональной зависимости.

Функция R=R(Ψ) должна принимать значение ±∞ при Ψ=0 и должна быть нечетной.
Этому условию соответствует, например, степенная функция с нечетным отрицательным показателем, например:

Или функция вида

где К2 - коэффициент, характеризующий чувствительность устройства управления поворотом к сигналу управления поворотом Ψ.
Совокупность выражений (9), (12), (16) представляет собой параметрическую формулу (19) для вычисления мгновенной угловой скорости ωi вращения каждого колеса в зависимости от сигнала Δ управления скоростью, и в зависимости от сигнала Ψ управления поворотом (частные случаи рассмотрены выше).

Где
ωi - угловая скорость i-го колеса
t - время
Δ - сигнал управления скоростью
Ψ - сигнал управления поворотом
ϖ=ϖ(Δ, t) - угловая скорость вращения любого из колес, как функция Δ и t при прямолинейном равномерном движении транспортного средства.
R=R(Ψ, t) - задаваемый первый радиус поворота как функция Ψ и t
Yi - проекция расстояния от центра масс транспортного средства до центра i-го колеса на ось, направленную в сторону от мгновенного центра поворота перпендикулярно плоскости колес и проходящую через центр масс транспортного средства. Для симметричной загрузки транспортного средства Yi по модулю равняется половине колеи транспортного средства.
Технические результаты №3 и №4 патентуемым способом достигаются, если функция R=R(Ψ, t) задается как последовательность импульсов (Фиг. 3а) и описывается, например, уравнением

Rm - амплитуда сигнала управления поворотом на «участке поворота»
R0 - амплитуда сигнала управления поворотом на «участке выравнивания»
TR - период следования сигнала управления поворотом
τR - длительность импульсного сигнала управления поворотом на «участке поворота».
В этом случае, транспортное средство будет совершать поворот вокруг центра поворота S «на участке поворота» и выравнивание продольной оси транспортного средства на «участке выравнивания». Выравнивание осуществляется вращением вокруг центра масс О в направлении движения предшествовавшего началу маневра (Фиг.3б). Частота следования импульсов при этом не должна выходить за границы частотной полосы пропускания приводов. При соблюдении этого условия и достаточно высокой частоте следования импульсов, траектория движения транспортного средства будет представлять собой практически плоскопараллельное перемещение транспортного средства под углом ξ=ξ(Rm, R0, TR, τR) относительно направления вектора его первоначальной скорости (Фиг.3в). Такое движение в процессе выполнения маневра может быть полезным на скользкой дороге, во избежание заноса транспортного средства, а также при обгоне. Сущности изобретения отвечает также маневрирование транспортного средства на парковке, когда пространство для маневра ограничено (Фиг.4а и Фиг.4б).
Поскольку, в соответствии с сущностью изобретения, траектория и скорость движения формализованы выражением (19), траектория и скорость движения транспортного могут задаваться программой, в соответствии с хранящейся в памяти бортового компьютера цифровой картой, с прокладкой азимута при помощи внутренних (инерциальных) средств топопривязки (класс устройств - G01C 23/00). Таким образом, обеспечивается достижение технического результата №5.
Как следует из формулы (19), на скорость вращения колеса ωi влияет только координата γi расположения центра масс транспортного средства. Это означает, что, если колея для всех оппозитных колесных пар одинакова, то величина угловой скорости вращения колес одного борта также будет одинакова, а фактическая координата Xi при идентичных колесах всегда будет соответствовать координате Х центра масс.
Для реализации патентуемого способа современной промышленностью достигнут необходимый уровень техники в области электроприводов и систем управления электроприводами. Имеются соответствующие технические решения в классах B60L 11/02 и H02P 3/00, например, по патентам US №5343971, RU 2394701, JP 2389617. В данных устройствах содержатся практически все признаки, необходимые для реализации патентуемого способа. Так, техническое решение по патенту US №5343971 представляет собою транспортное средство, отвечающее современному уровню техники и вполне подходящее для реализации патентуемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2496710C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ НЕРАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489730C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ЗАКРУТКИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС КОСМИЧЕСКОЙ ТРОСОВОЙ СИСТЕМЫ С ПОМОЩЬЮ ГРАВИТАЦИОННЫХ И ВНУТРЕННИХ СИЛ | 2012 |
|
RU2536611C2 |
| СПОСОБ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367762C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490686C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |






Изобретение относится к области транспорта, а именно к способам управления скоростью, положением в пространстве и направлением движения многоопорных колесных транспортных средств, реализующих схему бортового поворота. Технический результат заключается в уменьшении энергозатрат при повороте транспортного средства, обеспечении возможности такого режима вращения колес, при замедлении движения транспортного средства, который препятствует заносу и потере управляемости, увеличении маневренности транспортного средства, в т.ч. при разворотах на месте, обеспечении возможности плоскопараллельного маневра и движения транспортного средства по заданной траектории с использованием хранящейся в памяти бортового компьютера внутренней цифровой карты и внутренних (инерциальных) средств топопривязки. Для этого управлением обеспечивают одновременное изменение угловых скоростей вращения колес, причем каждому колесу придается угловая скорость вращения в соответствии с предлагаемой формулой, в которую входят сигнал управления скоростью и сигнал управления поворотом. 2 з.п. ф-лы, 7 ил. 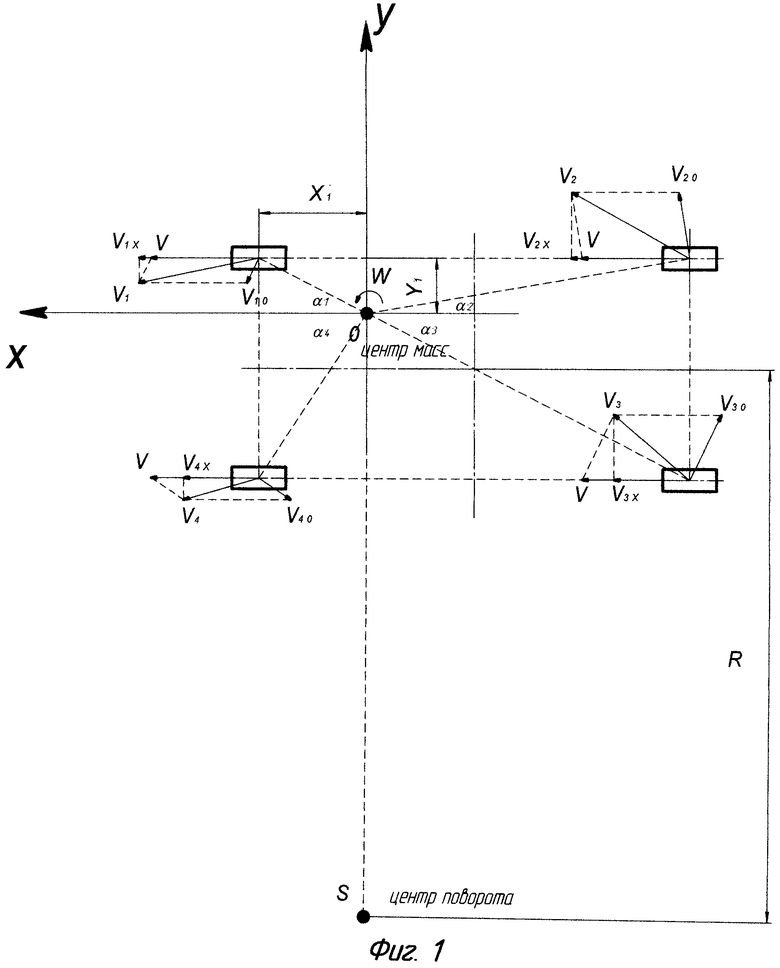
1. Способ управления скоростью, положением в пространстве и направлением движения многоопорного транспортного средства, снабженного независимыми электроприводами колес, реализующий схему бортового поворота и заключающийся в том, что управлением обеспечивают одновременное изменение угловых скоростей вращения колес, отличающийся тем, что каждому колесу придается угловая скорость вращения в соответствии с формулой:

где
ωi - угловая скорость i-го колеса
t - время
Δ - сигнал управления скоростью
Ψ - сигнал управления поворотом


R=R(Ψ, t) - задаваемый радиус поворота как функция Ψ и t
Yi - проекция расстояния от центра масс транспортного средства до центра i-го колеса на ось, направленную в сторону от центра поворота перпендикулярно плоскости колес и проходящую через центр масс транспортного средства.
2. Способ по п.1, заключающийся в том, что зависимость
3. Способ по п.1 или по п.2, заключающийся в том, что зависимость R=R(Ψ, t) в формуле задается как последовательность импульсов.
| Г.А.СМИРНОВ, Теория движения колесных машин, Москва, Машиностроение, 1990, стр | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Многоопорное транспортное средство с бортовым поворотом | 1983 |
|
SU1111926A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2005 |
|
RU2302349C1 |
| US 5343971 A1, 06.09.1994 | |||

