Изобретение относится к системам пространственной ориентации-установки по заданным значениям угла тангажа и угла крена грузовых платформ с размещенным на ней технологическим оборудованием различного назначения. Изобретение может найти применение для ориентации-установки платформ, несущих на себе, например, буровое горное оборудование, в частности для горизонтирования таких платформ. Областью применения изобретения могут быть также объекты военной техники, включающие в свой состав передвижные платформы, несущие на себе антенны радиолокаторов или пусковые ракетные установки.
Известно техническое решение по патенту на группу изобретений RU №2196893 от 2003.01.20 г. (п.1 формулы). Техническим результатом данного аналога является обеспечение требуемой точности и оперативности горизонтирования несущей платформы с буровым агрегатом и установка бурового агрегата в максимально устойчивое положение после горизонтирования. Для этого самоходную буровую установку с несущей платформой и расположенным на ней буровым агрегатом, находящимся в транспортном положении, выводят на предварительно размеченную рабочую площадку на местности и приступают к подготовке по выполнению основных технологических операций, заключающейся в том, что определяют положение бурового агрегата относительно рабочей площадки для установки его в рабочее положение, выдвигают по меньшей мере три гидравлических домкрата до соприкосновения с грунтом, несущую платформу с расположенным на ней буровым агрегатом устанавливают в горизонтальное положение в двух плоскостях по осям Х и Y и/или располагают бурильный агрегат вертикально или под определенным углом к оси Y. Включают гидравлические домкраты и осуществляют предварительное выдвижение всех гидравлических домкратов до соприкосновения с грунтом. Осуществляют давление на все гидравлические домкраты, равное или близкое к весу бурового агрегата, последовательно включают гидравлические домкраты и осуществляют кратковременное выдвижение гидравлических домкратов для гарантированного вывешивания бурового агрегата на гидравлических домкратах, формируют команду на автоматическое горизонтирование бурового агрегата, сначала по оси X, а затем по оси Y. Анализируют положение несущей платформы с расположенным на ней буровым агрегатом по осям Х и Y, причем сначала анализируют положение по оси X, а затем по оси Y, используя результаты полученного анализа, корректируют положение бурового агрегата в процессе установки его в горизонтальное положение по осям Х и Y путем автоматического управления выдвижением гидравлических домкратов. Формируют команду на окончание горизонтирования, если в процессе коррекции достигнуто одновременно горизонтирование по осям Х и Y несущей платформы и бурового агрегата. Если же в процессе коррекции не достигнуто горизонтирование по осям Х и Y несущей платформы и бурового агрегата, то формируют команду на повторение цикла горизонтирования, начиная с начала анализа положения несущей платформы с буровым агрегатом по оси Х.
Основным недостатком данного способа-аналога является неизбежность многократного повторения цикла горизонтирования, что связано с перекрестными связями, т.е. с влиянием каждого из задействованных домкратов на каждый из контролируемых параметров горизонтирования (по Х и по Y). Этот эффект будет проявляться даже при трех опорных домкратах - минимальном их количестве. Применение же многодомкратной опорной системы (более четырех домкратов) в данном способе вообще оказывается чрезвычайно затруднительным по указанной выше причине.
Ближайшим аналогом (прототипом) заявляемого способа, совпадающим с ним по значительному количеству существенных признаков, является техническое решение по патенту на группу изобретений RU №2367762 от 20.09.2009 г. (п.1 формулы). Способ-прототип состоит из следующих операций: платформу предварительно устанавливают на рабочей площадке, после чего приводят одновременно в действие с одинаковой скоростью домкраты в количестве не менее четырех, присоединенные к платформе в ее периферийных зонах. В процессе действия домкратов непрерывно контролируют развиваемое каждым из них усилие, определяя момент упора с определенным одинаковым усилием подвижной части каждого из домкратов в грунт рабочей площадки. В этот момент действие соответствующего домкрата останавливают. После остановки и упора всех домкратов в грунт с заданным усилием домкраты опять одновременно приводят в действие с одинаковой скоростью, причем, так же осуществляют контроль усилия упора каждого домкрата. По мере действия домкратов, вычисляют суммарное усилие всех домкратов. При достижении суммарным усилием всех домкратов заданной величины, составляющей определенную долю от веса платформы, останавливают действие всех домкратов, что завершает первичную установку. Далее определяют достигнутые в первичной установке параметры ориентации-установки, а именно угол крена и угол тангажа платформы. По знакам разности между необходимыми значениями углов тангажа и крена и достигнутыми в результате первичной установки значениями углов тангажа и крена определяют опорный домкрат - домкрат, которому необходимо нулевое перемещение подвижной части до необходимого положения ориентации объекта, и скоростной домкрат-домкрат, которому необходимо максимальное перемещение подвижной части до необходимого положения ориентации объекта; вычисляют перемещения для подвижной части каждого домкрата, потребные для достижения заданных значений угла крена и угла тангажа платформы, при условии неподвижности подвижной части опорного домкрата, потребное перемещение которой задается нулевым; задают значение скорости перемещения подвижной части скоростного домкрата; вычисляют скорость перемещения подвижной части каждого домкрата по формуле произведения величины заданной скорости перемещения подвижной части скоростного домкрата на отношение рассчитанного для данного домкрата потребного перемещения к потребному перемещению скоростного домкрата; приводят в действие все домкраты, кроме опорного, задавая движению подвижной части каждого домкрата вычисленную для нее скорость, при достижении подвижной частью каждого домкрата вычисленного для нее значения перемещения, ее движение (действие домкрата) останавливают. Далее определяют достигнутые разности заданных и достигнутых значений соответственно угла тангажа и угла крена и сравнивают эти разности с величиной допуска по каждому из указанных углов. При удовлетворительных результатах сравнения положение домкратов фиксируют; при неудовлетворительных результатах осуществляют повторный цикл действий, следующих за первичной установкой.
Способ-прототип осуществляется в два этапа, включающие первичную и окончательную установку, причем в процессе первичной установки управление электроприводами домкратов осуществляется в функции нагрузки, а в процессе окончательной установки - в функции пути (в терминах дисциплины «автоматизированный электропривод»). Достаточно широкое функциональное обобщение способа-прототипа не охватывает при этом возможности управления электроприводами домкратов в функции времени. Следствием этого обстоятельства является значительная стоимость устройств, реализующих способ-прототип и их недостаточная надежность, поскольку способ-прототип предусматривает применение дорогостоящих датчиков контроля положения подвижных частей домкратов, которые, учитывая большие перемещения этих частей (до метра и более), значительно снижают надежность всего устройства. Приемлемое решение достигается применением дорогостоящих (опять же) исполнительных синхронных электродвигателей с датчиками положения ротора.
Целью изобретения «Способ пространственной ориентации-установки несущей грузовой платформы» является снижение стоимости и увеличение надежности систем пространственной ориентации-установки по углу тангажа и по углу крена грузовых платформ за счет того, что окончательная пространственная ориентация - установка несущей грузовой платформы осуществляется в функции времени, что и является непосредственным первичным техническим результатом патентуемого способа. Указанный технический результат позволяет применить в устройствах, реализующих способ, весьма надежные и недорогие асинхронные электродвигатели. Кроме того, из конструкции исключаются дорогостоящие датчики контроля положения подвижных частей домкратов (по количеству домкратов), которые так же значительно снижают надежность всего устройства.
Патентуемый способ пространственной ориентации-установки несущей грузовой платформы включает первичную и окончательную установку, так же, как и способ-прототип. В процессе первичной установки платформу предварительно устанавливают на рабочей площадке, после чего приводят одновременно в действие с одинаковой скоростью домкраты, присоединенные к платформе в ее периферийных зонах, в количестве не менее четырех. В процессе действия домкратов, непрерывно измеряют развиваемое каждым из них усилие, определяя момент упора с определенным одинаковым усилием подвижной части каждого из домкратов в грунт рабочей площадки. В этот момент действие соответствующего домкрата останавливают. После остановки и упора всех домкратов в грунт с заданным усилием, домкраты повторно приводят одновременно в действие с одинаковой скоростью, причем, так же непрерывно измеряют усилие упора каждого домкрата. По мере действия домкратов, непрерывно вычисляют суммарное усилие всех домкратов. При достижении суммарным усилием всех домкратов заданной величины, составляющей определенную долю от веса платформы, останавливают действие всех домкратов, что завершает первичную установку. Далее осуществляют окончательную установку, в процессе которой измеряют достигнутые в первичной установке угол крена и угол тангажа платформы. По знакам разности соответственно между заданными значениями углов тангажа и крена и достигнутыми в результате первичной установки значениями углов тангажа и крена определяют опорный домкрат - домкрат, которому необходимо нулевое перемещение подвижной части до заданного положения ориентации платформы, и скоростной домкрат-домкрат, которому необходимо максимальное перемещение подвижной части до заданного положения ориентации платформы. Далее вычисляют перемещения для подвижной части каждого домкрата, потребные для достижения заданных значений угла крена и угла тангажа платформы, при условии неподвижности подвижной части опорного домкрата, потребное перемещение которой задается нулевым. Далее задают значение скорости перемещения подвижной части скоростного домкрата. Далее вычисляют время действия домкратов как отношение потребного перемещения подвижной части скоростного домкрата к его заданной скорости. Далее вычисляют скорость перемещения подвижной части каждого домкрата как отношение рассчитанного для данного домкрата потребного перемещения к времени действия домкратов. Далее начинают отсчет времени и одновременно приводят в действие все домкраты, кроме опорного, задавая движению подвижной части каждого домкрата вычисленную для нее скорость. Далее, по истечении времени действия домкратов с начала его отсчета, все домкраты останавливают. Далее вычисляют достигнутые разности заданных и достигнутых значений соответственно угла тангажа и угла крена и сравнивают модули этих разностей с величиной допуска по каждому из указанных углов. При удовлетворительных результатах сравнения положение домкратов фиксируют; при неудовлетворительных результатах осуществляют повторную окончательную установку.
Обозначенная сущность изобретения связана с заявленным техническим результатом, следующим образом:
1. В процессе окончательной установки перемещение подвижных частей домкратов не измеряется и не контролируется, в отличие от способа-прототипа, но измеряется и контролируется время их действия, которое составляет предварительно вычисленную и задаваемую величину, что и является признаком управления электроприводами домкратов «в функции времени».
На Фиг.1 изображена геометрическая схема реализации способа пространственной ориентации-установки платформы несущей грузовой платформы с использованием четырех домкратов, применительно к частному случаю, когда заданные угол тангажа αз=0 и угол крена βз=0, т.е. осуществляется наиболее типичное действие - горизонтирование платформы.
Способ ориентации-установки несущей грузовой платформы реализуется следующим образом (см. Фиг.1): платформу (1) предварительно устанавливают на рабочей площадке, после чего приводят одновременно в действие с одинаковой скоростью домкраты (2), (3), (4), (5), присоединенные к платформе в ее периферийных зонах. В процессе действия домкратов, непрерывно измеряют развиваемое каждым из них усилие, определяя момент упора с определенным одинаковым усилием подвижной части каждого из домкратов в грунт рабочей площадки. В этот момент действие соответствующего домкрата останавливают. Величина указанного усилия составляет порядка 10% от расчетной доли веса платформы, приходящейся на один домкрат системы, при условии равномерного распределения нагрузки на домкраты. Далее, после упора всех домкратов в грунт с одинаковым заданным усилием и их остановки, домкраты опять одновременно приводят в действие с одинаковой скоростью, причем, так же осуществляют непрерывное измерение усилия упора каждого домкрата. Одновременно с действием домкратов, непрерывно вычисляют суммарное усилие всех домкратов и при достижении этим усилием заданной величины, составляющей определенную долю (порядка 50%) от веса платформы, останавливают действие всех домкратов, что завершает первичную установку. Первичная установка обеспечивает надежный упор домкратов в грунт рабочей площадки, компенсацию естественных неровностей площадки и податливости ее грунта (проседание грунта под нагрузкой домкрата). Далее следует окончательная установка, которая состоит из следующих операций. Измеряют достигнутые в первичной установке угол крена и угол тангажа платформы. Далее вычисляют рассогласование ∆α=(αз-αТ) между заданным αз и достигнутым αТ значениями углов тангажа, вычисляют рассогласование ∆β=(βз-βТ) между заданным βз и достигнутым βТ значениями углов крена платформы. По знакам ∆α и ∆β определяют опорный домкрат - домкрат, которому необходимо нулевое перемещение подвижной части до заданного положения ориентации платформы, и скоростной домкрат-домкрат, которому необходимо максимальное перемещение подвижной части до заданного положения ориентации платформы. Всего возможно четыре сочетания знаков ∆α и ∆β. В ситуации, соответствующей расчетной схеме изображенной на Фиг.1, ∆α и ∆β отрицательны, что однозначно позволяет определить один домкрат (3), который обеспечивал бы, при дальнейшем своем действии одновременное увеличение ∆α и ∆β. Из этой же схемы однозначно определяется скоростной домкрат (5), который обеспечивал бы, при дальнейшем своем действии одновременное уменьшение ∆α и ∆β. В других ситуациях, например, когда ∆α и ∆β положительны, опорным домкратом будет домкрат (5), а скоростным - домкрат (3). Если ∆α положительна, а ∆β отрицательна, то опорным будет домкрат (4) а скоростным домкрат (2), соответственно, если ∆α отрицательна, а ∆β положительна, то опорным будет домкрат (2), а скоростным домкрат (4). Далее, решая геометрическую задачу (см. Фиг.1), вычисляют перемещения для подвижной части каждого домкрата Нi, т.е. Н2, Н4, Н5, потребные для достижения заданных значений угла тангажа αз и угла крена βз платформы, при условии неподвижности подвижной части опорного домкрата (3), потребное перемещение которой задается нулевым Н3=0. Далее задают, сообразуясь с параметрами платформы (масса, габариты и т.п.), определенное значение скорости V5, перемещения подвижной части скоростного домкрата (5). Далее вычисляют время действия домкратов Т, потребное для перемещения подвижной части скоростного домкрата (5) на величину Н5 по формуле  . Далее вычисляют скорость Vi перемещения подвижной части каждого домкрата как отношение рассчитанного для данного домкрата потребного перемещения Н, к времени действия домкратов Т, т.е. по формуле
. Далее вычисляют скорость Vi перемещения подвижной части каждого домкрата как отношение рассчитанного для данного домкрата потребного перемещения Н, к времени действия домкратов Т, т.е. по формуле  . Далее начинают отсчет времени и одновременно приводят в действие все домкраты, кроме опорного (3), задавая движению подвижной части каждого домкрата вычисленную для нее скорость Vi. Далее, по истечении времени Т от начала его отсчета, действие всех домкратов одновременно останавливают. При этом подвижной частью каждого домкрата достигается вычисленное для нее значение перемещения Нi, т.к. скорости перемещения подвижных частей Vi домкратов заданы пропорционально их потребным перемещениям Нi. Далее вычисляют контрольные рассогласования ∆α и ∆β. Далее сравнивают модули
. Далее начинают отсчет времени и одновременно приводят в действие все домкраты, кроме опорного (3), задавая движению подвижной части каждого домкрата вычисленную для нее скорость Vi. Далее, по истечении времени Т от начала его отсчета, действие всех домкратов одновременно останавливают. При этом подвижной частью каждого домкрата достигается вычисленное для нее значение перемещения Нi, т.к. скорости перемещения подвижных частей Vi домкратов заданы пропорционально их потребным перемещениям Нi. Далее вычисляют контрольные рассогласования ∆α и ∆β. Далее сравнивают модули  и
и  соответственно с величинами допусков εα и εβ ориентации-установки по углу тангажа α и углу крена β. Сравнение осуществляют операцией вычитания
соответственно с величинами допусков εα и εβ ориентации-установки по углу тангажа α и углу крена β. Сравнение осуществляют операцией вычитания  и
и  . Результат вычитания со знаком «+» свидетельствует об удовлетворительной ориентации - установке платформы по данному углу, знак (-) - о неудовлетворительной. Далее, при удовлетворительных результатах сравнения, как по углу тангажа, так и по углу крена, положение домкратов фиксируют, а при неудовлетворительных результатах, хотя бы по одному из углов ориентации-установки (может иметь место при повышенной податливости грунта опорной площадки), далее осуществляют повторный цикл окончательной установки (все операции следующие за первичной установкой), вплоть до достижения удовлетворительных результатов.
. Результат вычитания со знаком «+» свидетельствует об удовлетворительной ориентации - установке платформы по данному углу, знак (-) - о неудовлетворительной. Далее, при удовлетворительных результатах сравнения, как по углу тангажа, так и по углу крена, положение домкратов фиксируют, а при неудовлетворительных результатах, хотя бы по одному из углов ориентации-установки (может иметь место при повышенной податливости грунта опорной площадки), далее осуществляют повторный цикл окончательной установки (все операции следующие за первичной установкой), вплоть до достижения удовлетворительных результатов.
Реализация способа с использованием домкратов в количестве, превышающем 4 шт. осуществляется по идентичному алгоритму. Однако следует заметить, что в этом случае может обнаружиться неоднозначность в определении опорного и скоростного домкратов. Реализация способа осуществляется в этом случае выбором любого одного домкрата в качестве опорного и любого одного домкрата в качестве скоростного из числа удовлетворяющих указанным выше критериям, а именно: опорный домкрат обеспечивает, при дальнейшем своем действии (выдвижении подвижной части) одновременное увеличение рассогласования угла тангажа αT и угла крена βТ, относительно их заданных значений βз и αз, а скоростной домкрат обеспечивает при дальнейшем своем действии (выдвижении подвижной части) одновременное уменьшение рассогласования угла тангажа αз и угла крена βТ, относительно их заданных значений βз и αз. При этом скорости и перемещения некоторых домкратов из числа всех остальных могут принимать в соответствии с приведенными расчетными зависимостями отрицательные значения, что вообще не изменяет сущность способа, хотя конкретная геометрическая схема платформы с расположенными на ней домкратами позволяет однозначно назначить четырем возможным сочетаниям знаков ∆α и ∆β четыре сочетания опорных и скоростных домкратов из числа крайних (угловых), что обеспечит движение всех домкратов без реверса. В процессе окончательной установки перемещение подвижных частей домкратов, в отличие от способа-прототипа, не измеряется, а измеряется время их действия, которое составляет рассчитанную и задаваемую величину, что и является признаком управления домкратами «в функции времени», т.е. достижения заявленного для способа технического результата.
Известно уже упоминаемое выше техническое решение по патенту на группу изобретений RU №2196893 от 20.01.2003 г. (п.3 формулы). Данное устройство-аналог аппаратно реализует запатентованный способ (п.1 формулы). Недостатком аналога является применение гидравлических домкратов прямого действия для приводов аутригеров, что не обеспечивает их долговременное и надежное стопорение. Особенно ненадежны гидравлические домкраты в условиях больших перепадов температур, например сезонных, при которых возрастает вероятность выхода из строя не только домкратов, но и других элементов гидросистемы. Кроме того, стоимость гидравлических устройств достаточно высока по сравнению с электромеханическими устройствами сходного функционального назначения.
За прототип изобретения принимается устройство для ориентации-установки несущей грузовой платформы по патенту на группу изобретений RU №2367762 от 20.09.2009 г. (п.4 формулы). Прототип включает в себя платформу с размещенными на ней датчиками угла тангажа и угла крена, систему домкратов в количестве не менее четырех, присоединенных к платформе в ее периферийных зонах, систему управления, связанную управляющими домкратными выходами с домкратами, а информационными входами с датчиками угла тангажа и угла крена, источник питания, нагруженный на силовой вход системы управления. Устройство-прототип снабжено электромеханическими управляемыми по скорости и по перемещению их подвижной части домкратами, каждый из которых оборудован датчиком положения подвижной части, датчиком усилия и электромеханическим стопорящим устройством-фиксатором, причем выходы датчиков связаны с информационными входами системы управления, а электромеханические стопорящие устройства-фиксаторы связаны с управляющими стопорящими выходами системы управления. Структура и особенности устройства-прототипа позволяют реализовать любой алгоритм его действия в функции пути и нагрузки (усилия) каждого из домкратов, но не в функции времени. Однако управление электроприводами домкратов в функции времени конструктивно реализуется наиболее просто и с малыми затратами, т.к. и позволяет исключить из устройства датчики положения подвижных частей домкрата и, следовательно, позволяет применить в конструкции привода домкрата любые типы электродвигателей, в то время как в прототипе предпочтительно используются дорогостоящие синхронные вентильные электродвигатели с датчиком положения ротора и с возбуждением от постоянных магнитов. Использование отдельных от электродвигателя датчиков положения подвижных частей домкратов и другого типа электродвигателей еще более усложняет конструкцию и увеличивает ее стоимость, учитывая, что перемещение подвижных частей домкратов может достигать метра и более. Указанные особенности являются недостатками устройства-прототипа.
Целью изобретения «Электромеханическое устройство для пространственной ориентации-установки несущей грузовой платформы» является использование его в патентуемом способе пространственной ориентации-установки несущей грузовой платформы. При использовании изобретения достигаются следующие полезные технические результаты:
1. Уменьшается стоимость устройства, за счет того что из конструкции исключены дорогостоящие датчики контроля положения подвижных частей домкратов (по количеству домкратов) и применены асинхронные электродвигатели, сравнительно недорогие по сравнению с электродвигателями прототипа.
2. Увеличивается надежность устройства, за счет того что из конструкции исключены датчики контроля положения подвижных частей домкратов (по количеству домкратов) и применены асинхронные электродвигатели, сравнительно более надежные по сравнению с электродвигателями прототипа.
Сущность изобретения, обеспечивающая достижение указанного технического результата заключается в том, что электромеханическое устройство для пространственной ориентации-установки грузовой платформы, включающее платформу с размещенными на ней датчиками угла тангажа и угла крена, систему электромеханических домкратов с передачей движения на рабочий орган посредством механизма винт-гайка в количестве не менее четырех, присоединенных к платформе в ее периферийных зонах, систему управления, связанную управляющими домкратными выходами с домкратами, а информационными входами с датчиками угла тангажа и угла крена, источник питания, нагруженный на силовой вход системы управления, причем домкраты выполнены управляемыми по скорости перемещения их подвижной части, каждый из домкратов снабжен датчиком усилия и электромеханическим стопорящим устройством-фиксатором, причем выходы датчиков связаны с информационными входами системы управления, а электромеханические стопорящие устройства-фиксаторы связаны с управляющими стопорящими выходами системы управления. В отличие от прототипа заявляемое электромеханическое устройство пространственной ориентации-установки грузовой платформы дополнительно снабжено управляемым таймером, который своим информационным выходом связан с соответствующим информационным входом системы управления, а своим управляющим входом связан с соответствующим управляющим (таймерным) выходом системы управления.
Обозначенная сущность изобретения связана с заявленными техническими результатами очевидным образом: из устройства исключены дорогостоящие датчики перемещений подвижных частей домкратов в любом их исполнении. Надежность повышается уменьшением числа очень критичных по надежности конструктивных элементов, какими являются указанные датчики. Значительное снижение стоимости устройства и одновременное повышение его надежности достигается при использовании в устройстве обычных асинхронных электродвигателей с коротко-замкнутым ротором, поскольку реализуемый устройством способ использует принцип управления в функции времени и не предусматривает контроль перемещений подвижных частей домкратов или каких бы то ни было кинематически связанных с этими частями других элементов привода (например, роторов электродвигателей). Асинхронные электродвигатели являются наиболее распространенным, сравнительно недорогим и исключительно надежным типом электродвигателей.
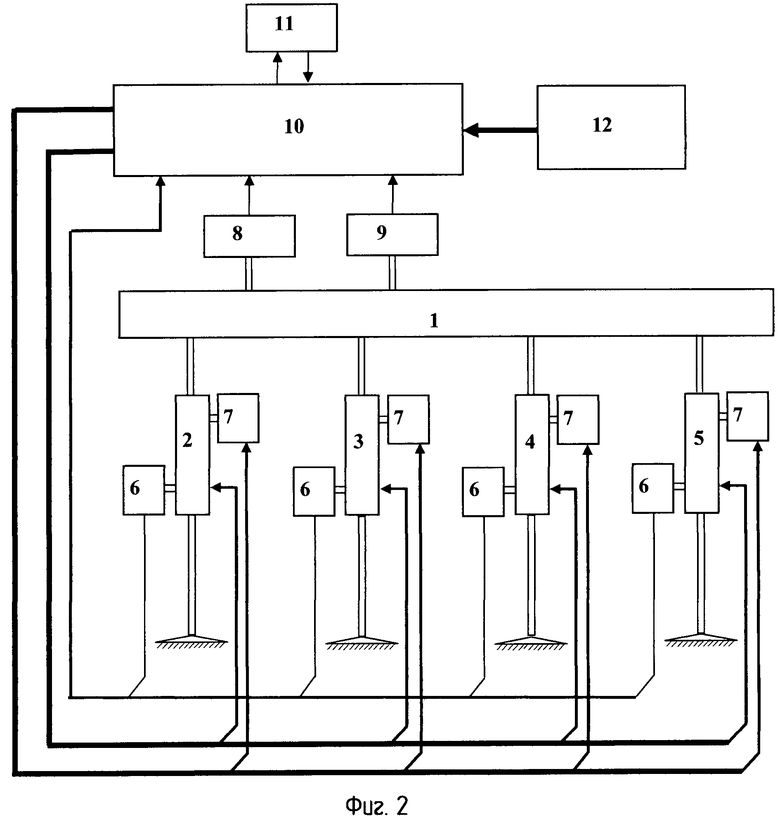
На Фиг.2 изображена функциональная схема электромеханического устройства для осуществления способа пространственной ориентации-установки несущей грузовой платформы, реализованная с использованием четырех электромеханических домкратов.
Электромеханическое устройство для пространственной ориентации-установки несущей грузовой платформы (далее по тексту - устройство) включает в себя платформу (1) и электромеханические домкраты (2), (3), (4), (5), каждый из которых снабжен датчиком усилия (6) и стопорящим устройством-фиксатором (7). На платформе (1) укреплены датчик угла крена (8) и датчик угла тангажа (9), которые своими выходами соединены с информационными входами системы управления (10). Другими информационными входами система управления (10) связана и датчиками усилия (6) и с информационным выходом управляемого таймера (11). В состав устройства входит источник питания (12), нагруженный на силовой вход системы управления (10), которая управляющими домкратными выходами связана с домкратами (2), (3), (4), (5), управляющими стопорящими выходами связана с электромеханическими стопорящими устройствами-фиксаторами (7), а управляющим таймерным выходом связана с управляющим входом таймера (11). Стопорящие устройства-фиксаторы представляют собой фрикционные муфты с электромагнитным приводом.
В качестве домкратов могут быть использованы идентичные домкраты электромеханического типа с передачей движения на рабочий орган посредством механизма винт-гайка, снабженные электроприводом на базе асинхронных электродвигателей. Усилие домкрата, как и в устройстве прототипе, возможно контролировать по току двигателя, т.е. использовать датчик тока в качестве датчика усилия (6). Особенностью системы управления (10) является то, что она содержит в себе процессорный блок алгоритмической обработки информации (не показан), поступающей от датчика угла крена (8), датчика угла тангажа (9), датчиков усилия (6) и таймера (11). Процессорный блок может быть выполнен на базе микроконтроллеров. Кроме того, в систему управления (10) входят силовые блоки (инверторы) управления двигателями домкратов (не показаны). Как функциональный узел таймер (11) может входить в состав системы управления (10). Энергетика устройства обеспечивается источником электропитания (12), который своим выходом нагружен на силовой вход системы управления (10). В качестве источника электропитания (12) может быть использован, например, бортовой аккумулятор.
Структура и особенности патентуемого устройства позволяют реализовать любой алгоритм его действия в функции нагрузки (усилия) каждого из домкратов на этапе первичной установки, и - в функции времени на этапе окончательной установки. Алгоритм использования устройства (его работа) для реализации патентуемого способа ориентации-установки несущей грузовой платформы приведен выше, в описании патентуемого способа.
Предложенное устройство может быть изготовлено промышленным способом на базе современного машиностроительного предприятия с электромеханическим профилем производства без применения специальных технологий и оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367762C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДОМКРАТ | 2009 |
|
RU2412106C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ, ПОЛОЖЕНИЕМ В ПРОСТРАНСТВЕ И НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, РЕАЛИЗУЮЩЕГО СХЕМУ БОРТОВОГО ПОВОРОТА И СНАБЖЕНННОГО НЕЗАВИСИМЫМИ ЭЛЕКТРОПРИВОДАМИ КОЛЕС | 2012 |
|
RU2517284C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГОРИЗОНТИРОВАНИЯ НЕСУЩЕЙ ПЛАТФОРМЫ С БУРОВЫМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2196893C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
Изобретение относится к области подъемников и предназначено для горизонтальной установки платформ. Способ пространственной ориентации-установки несущей грузовой платформы (1) включает первичную и окончательную установку. При повторной окончательной установке после задания значения скорости перемещения подвижной части домкрата вычисляют время действия домкратов как отношение потребного перемещения подвижной части скоростного домкрата к его заданной скорости. Вычисляют скорость перемещения подвижной части каждого домкрата как отношение рассчитанного для данного домкрата потребного перемещения к времени действия домкратов. Начинают отсчет времени и одновременно приводят в действие все домкраты, кроме опорного, задавая движению подвижной части каждого домкрата вычисленную для нее скорость. По истечении времени действия домкратов с начала его отсчета все домкраты останавливают. Достигается горизонтальная установка платформ. 2 з.п. ф-лы, 2 ил.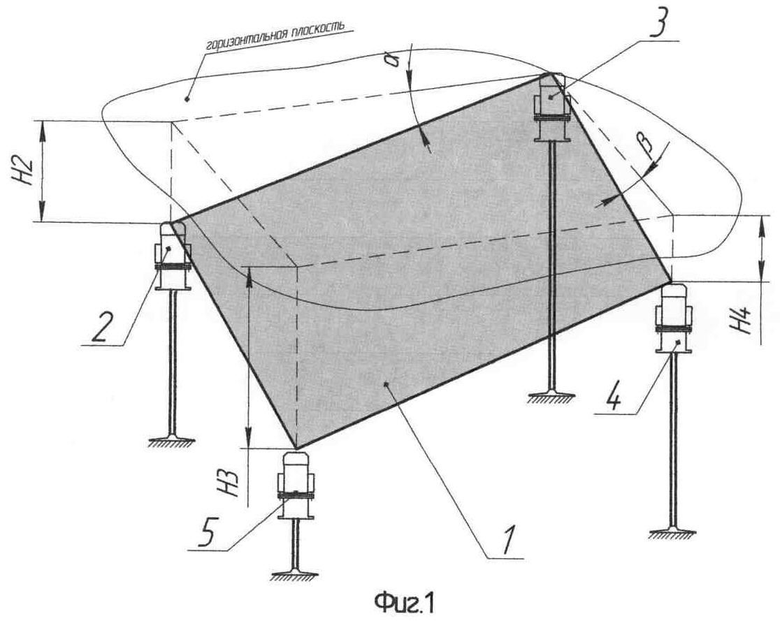
1. Способ пространственной ориентации-установки несущей грузовой платформы, включающий первичную и окончательную установку, заключающийся в том, что в процессе первичной установки платформу предварительно устанавливают на рабочей площадке, после чего приводят одновременно в действие с одинаковой скоростью домкраты, присоединенные к платформе в ее периферийных зонах, в количестве не менее четырех; в процессе действия домкратов непрерывно измеряют развиваемое каждым из них усилие, определяя момент упора с определенным одинаковым усилием подвижной части каждого из домкратов в грунт рабочей площадки и в этот момент действие соответствующего домкрата останавливают; после остановки и упора всех домкратов в грунт с заданным усилием домкраты повторно приводят одновременно в действие с одинаковой скоростью, причем также непрерывно измеряют усилие упора каждого домкрата; по мере действия домкратов непрерывно вычисляют суммарное усилие всех домкратов и при достижении суммарным усилием всех домкратов заданной величины, составляющей определенную долю от веса платформы, останавливают действие всех домкратов, что завершает первичную установку; далее осуществляют окончательную установку, в процессе которой измеряют достигнутые в первичной установке угол крена и угол тангажа платформы; по знакам разности соответственно между заданными значениями углов тангажа и крена и достигнутыми в результате первичной установки значениями углов тангажа и крена определяют опорный домкрат-домкрат, которому необходимо нулевое перемещение подвижной части до заданного положения ориентации платформы, и скоростной домкрат-домкрат, которому необходимо максимальное перемещение подвижной части до заданного положения ориентации платформы; далее вычисляют перемещения для подвижной части каждого домкрата, потребные для достижения заданных значений угла крена и угла тангажа платформы, при условии неподвижности подвижной части опорного домкрата, потребное перемещение которой задается нулевым; далее задают значение скорости перемещения подвижной части скоростного домкрата; вычисляют достигнутые разности заданных и достигнутых значений соответственно угла тангажа и угла крена и сравнивают модули этих разностей с величиной допуска по каждому из указанных углов, при удовлетворительных результатах сравнения положение домкратов фиксируют; при неудовлетворительных результатах сравнения осуществляют повторную окончательную установку, отличающийся тем, что после задания значения скорости перемещения подвижной части домкрата вычисляют время действия домкратов как отношение потребного перемещения подвижной части скоростного домкрата к его заданной скорости; далее вычисляют скорость перемещения подвижной части каждого домкрата как отношение рассчитанного для данного домкрата потребного перемещения к времени действия домкратов; далее начинают отсчет времени и одновременно приводят в действие все домкраты, кроме опорного, задавая движению подвижной части каждого домкрата вычисленную для нее скорость; далее, по истечении времени действия домкратов с начала его отсчета, все домкраты останавливают.
2. Способ по п.1, отличающийся тем, что первичную установку завершают при достижении суммарным усилием всех домкратов величины, составляющей половину от веса платформы с размещенным на ней оборудованием.
3. Способ по п.1, отличающийся тем, что все необходимые вычисления и управление скоростями и перемещениями домкратов осуществляют в автоматическом режиме с использованием процессорного блока алгоритмической обработки информации.
| СПОСОБ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2367762C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГОРИЗОНТИРОВАНИЯ НЕСУЩЕЙ ПЛАТФОРМЫ С БУРОВЫМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2196893C1 |
| JP 11035285 А, 09.02.1999 | |||
| JP 10236774 А, 08.09.1998 | |||
| JP 10230824 А, 02.09.1998. | |||

