ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к инвазивным диагностическим методикам, а именно к картированию физиологических параметров внутренних органов человека.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
При выполнении множества медицинских процедур требуется размещение в теле человека определенных объектов, таких как датчики, трубки, катетеры, дозирующие устройства и имплантаты. Для определения местонахождения таких объектов были разработаны системы позиционирования. Одним из известных специалистам в области способов является система позиционирования с использованием магнитного поля. При определении местонахождения объекта с помощью такой системы генераторы магнитного поля располагаются ниже туловища пациента в строго определенных местах, находящихся вне тела пациента. Датчик магнитного поля, вмонтированный в дистальный конец зонда, под действием магнитного поля генерирует электрические сигналы, указывающие координаты положения дистального конца зонда. Такие способы и системы описаны в патентах США №№ 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, в патентной заявке PCT № WO 96/05768 и патентных заявках США №№ 2002/0065455 A1, 2003/0120150 A1 и 2004/0068178 A1, раскрытие информации по которым в силу ссылки на них полностью включается в настоящий документ.
При размещении зонда внутри тела может возникнуть необходимость прямого контакта дистального наконечника зонда с тканями тела. Контакт можно проверить, измеряя либо электрическое полное сопротивление, либо давление дистального наконечника зонда на ткани тела. Например, в патентных заявках № 2007/0100332, поданной Paul et al., и № 2009/0093806, поданной Govari et al., описаны способы определения контактного давления дистального наконечника катетера на ткани внутри полости тела с помощью датчика усилия, встроенного в катетер.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один из вариантов осуществления настоящего изобретения предлагает способ картирования, включающий в себя этапы, на которых принимают входные сигналы, измеренные зондом в соответствующих местоположениях внутри полости тела субъекта. В каждом из этих местоположений определяют соответствующее качество контакта между зондом и тканью в полости тела. Входные сигналы, для которых соответствующее качество контакта находится за пределами заданного диапазона, отклоняют, а карту полости тела создают с использованием неотклоненных входных сигналов.
В одном из раскрываемых вариантов осуществления полость тела представляет собой камеру сердца, а прием входных сигналов содержит прием сигналов от датчика положения в зонде, указывающих координаты дистального конца зонда внутри полости тела.
В некоторых вариантах осуществления прием входных сигналов содержит измерение физиологического параметра в местоположениях, а создание карты содержит картирование физиологического параметра по всей полости тела. Определение физиологического параметра может содержать прием сигналов, указывающих электрическую активность ткани.
В раскрываемых вариантах осуществления определение соответствующего качества контакта содержит определение давления, оказанного на дистальный конец зонда. Как правило, определение давления содержит прием сигнала от датчика усилия в зонде. Отклонение входных сигналов содержит отклонение результатов, если давление ниже заданной нижней границы и (или) выше заданной верхней границы. В одном из вариантов осуществления способ дополнительно содержит этап, на котором осуществляют автоматическое управление зондом в зависимости от определенного давления для перемещения зонда внутри полости тела.
В альтернативном варианте осуществления определение соответствующего качества контакта содержит определение электрического полного сопротивления между зондом и тканью.
В одном из вариантов осуществления этап создания карты содержит этап, на котором добавляют на карту метки, указывающие соответствующее качество контакта в одном или нескольких местоположениях.
В соответствии с одним из вариантов осуществления настоящего изобретения также предлагается устройство картирования, включающее: зонд, имеющий дистальный конец, выполненный с возможностью введения в полость тела, и содержащий контактный датчик для определения соответствующего качества контакта между зондом и тканью во множестве местоположений в полости тела; и панель управления, выполненную с возможностью приема входных сигналов от зонда, указывающих качество контакта в каждом соответствующем местоположении, для отклонения входных сигналов, для которых соответствующее качество контакта находится за пределами диапазона, и, применяя неотклоненные сигналы, для создания карты полости тела.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Представленное в настоящем документе описание приводится в качестве примера со ссылкой на прилагаемые фигуры:
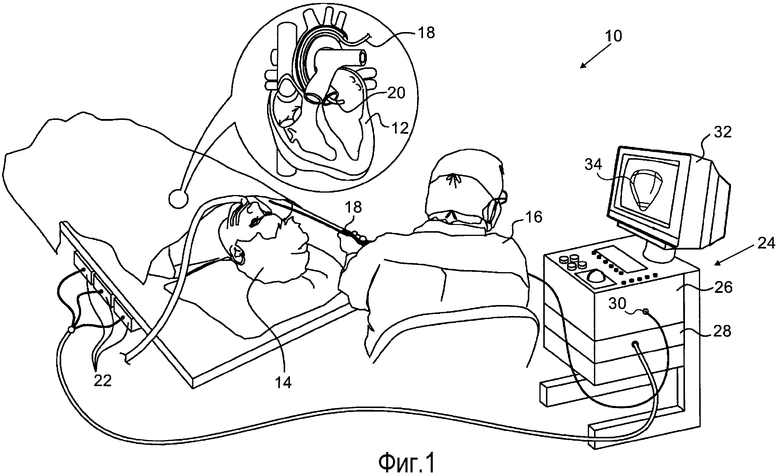
на Фиг.1 представлено схематическое изображение системы картирования в соответствии с одним из вариантов осуществления настоящего изобретения;
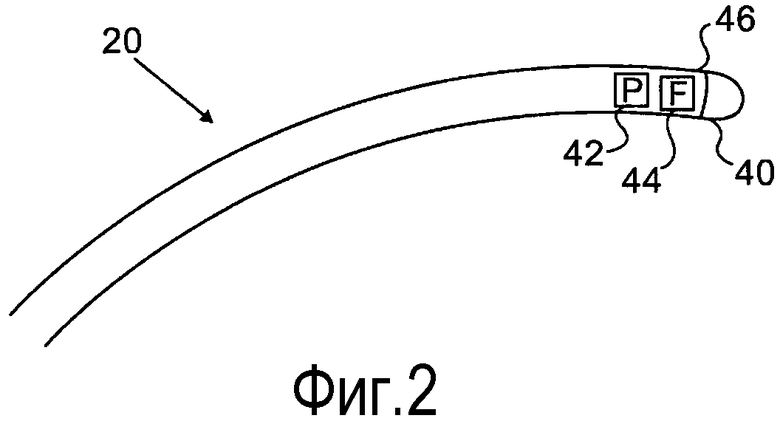
на Фиг.2 представлен схематический вид сбоку дистальной части катетера в соответствии с одним из вариантов осуществления настоящего изобретения; и
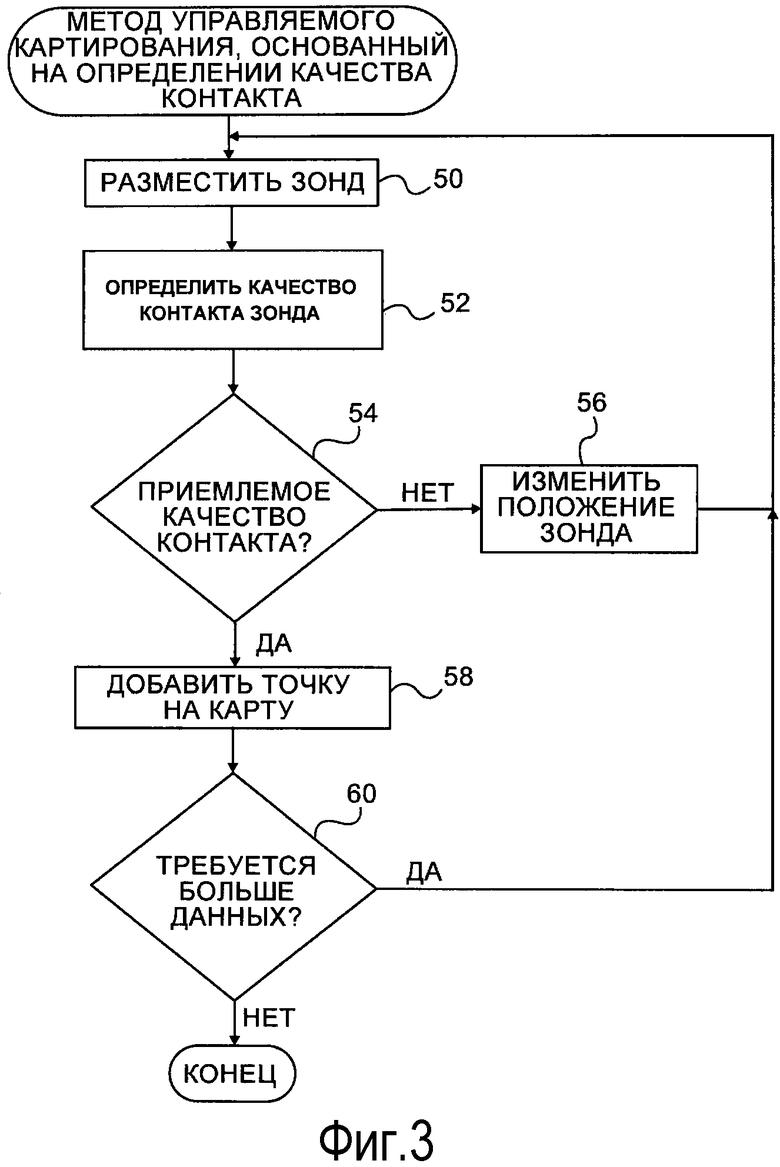
на Фиг.3 представлена блок-схема, на которой схематически показан способ управляемого картирования, основанный на определении качества контакта, в соответствии с одним из вариантов осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
При электрофизиологической диагностике с помощью инвазивного зонда, например, при внутрисердечном электрокартировании, важно соблюдать надлежащий уровень давления зонда на ткань. Для обеспечения хорошего контакта электрода с тканью нужно, чтобы зонд давил на ткань с достаточной силой. При плохом электрическом контакте полученные данные могут быть неточными. С другой стороны, избыточное давление может привести к деформации ткани, и таким образом исказить карту. В тяжелых случаях слишком сильное давление может быть причиной физического повреждения стенок полости тела.
В вариантах осуществления настоящего изобретения сбор данных для электрофизиологического картирования (т.е. картирования местоположения зонда и электрической активности ткани, контактирующей с зондом в этом местоположении) управляется таким образом, что координаты местоположения поступают только при адекватном контакте зонда с тканью. Качество контакта (т.е. мера адекватности контакта зонда с тканью) можно проверить, определяя контактное давление зонда на ткань с помощью датчика усилия, как описано далее. В качестве альтернативы качество контакта можно проверить другими средствами, например путем определения электрического полного сопротивления. Координаты местоположения для создания карты считываются только в том случае, если качество контакта находится в пределах заданного диапазона. Если качество контакта находится за пределами заданного диапазона оператору может быть предложено переместить катетер.
В описываемых далее вариантах осуществления при электрофизиологическом картировании сердца используется управление контактом. Система управления контактом ограничивает сбор точек на карте теми, для которых качество контакта находится в пределах заданного диапазона. Термин «местоположение на карте» в контексте настоящей заявки на патент и в формуле изобретения означает набор пространственных координат, возможно вместе с величиной физиологического параметра в данном местоположении. В описываемых далее вариантах осуществления величина сигнала в данном местоположении на карте означает величину электрической активности сердца. Такой способ управления контактом может быть особенно полезным, например, в сочетании с такими методиками, как биполярное электрическое картирование и картирование по времени местной активации. В качестве альтернативы управление контактом можно использовать при картировании других органов, а также при картировании других типов физиологических параметров. Кроме того или в качестве альтернативы, информацию о качестве контакта можно добавлять к меткам, связанным с координатами местоположения на карте.
В качестве альтернативы в некоторых случаях пространственные координаты можно использовать для создания карты без обязательной регистрации какого-либо другого физиологического параметра на карте. Например, при создании физической карты поверхности наконечник катетера может перемещаться по внутренней поверхности камеры сердца (или другой полости тела), при этом регистрации могут подлежать только те координаты местоположения, в которых контактное давление выше некоторого порогового значения. В качестве альтернативы при создании объемной карты полости тела катетер может перемещаться внутри этой полости, при этом регистрации могут подлежать только те координаты местоположения, в которых контактное давление ниже некоторого порогового уровня. (Такую объемную карту можно преобразовать в карту поверхности путем нахождения и соединения внешних точек объема; для этого можно использовать различные способы, например алгоритм восстановления поверхности, описанный в патенте США № 6968299, раскрытие информации по которому в силу ссылки на него полностью включается в настоящий документ).
Определять качество контакта можно различными способами. В первом варианте осуществления датчик усилия может быть вмонтирован в дистальную часть зонда. При контакте зонда с тканями тела результат определения давления дистального наконечника зонда на ткань передается на блок управления, который принимает для создания карты только такие значения давления, которые находятся в пределах заданного диапазона. В альтернативном варианте осуществления датчик принимает и передает на блок управления информацию об электрическом полном сопротивлении, который принимает для создания карты только такие значения сопротивления, которые находятся в пределах заданного диапазона.
На Фиг.1 представлена система позиционирования 10, сконструированная и работающая в соответствии с одним из раскрываемых вариантов осуществления настоящего изобретения. Систему 10 можно создать, например, на основе системы CARTOTM, производимой Biosense Webster Inc. (Дайамонд Бар, шт. Калифорния). Система 10 состоит из зонда 18, например катетера, и панели управления 24. В описываемом ниже варианте осуществления предполагается, что при создании карт электрофизиологических характеристик одной или более камер сердца используется зонд 18. В качестве альтернативы зонд 18 можно использовать, внеся соответствующие изменения, и при других терапевтических и (или) диагностических процедурах на сердце или других органах тела.
Оператор 16, например кардиолог, по сосудам вводит зонд 18 пациенту 14, так чтобы дистальный конец 20 зонда 18 попал в камеру сердца пациента 12. Оператор 16 продвигает зонд 18 таким образом, чтобы дистальный наконечник зонда 18 коснулся ткани эндокарда в заданном или заданных местоположениях. Проксимальным концом зонд 18, как правило, присоединен с помощью подходящего устройства к панели управления 24.
Панель управления 24 посредством системы позиционирования с использованием магнитного поля определяет координаты положения дистального конца 20 внутри сердца 12. Для определения координат положения возбуждающий контур 28 панели управления 24 приводит в действие генераторы поля 22, которые создают магнитные поля внутри тела пациента 14. Как правило, генераторы поля 22 - это катушки, размещенные ниже туловища пациента в строго определенных местах, находящихся вне тела пациента 14. Эти катушки генерируют магнитные поля заданной величины, распространяющиеся на сердце 12. Датчик магнитного поля, вмонтированный в дистальный конец 20 зонда 18 (показан на Фиг. 2), под действием магнитного поля генерирует электрические сигналы. Процессор 26 обрабатывает эти сигналы и определяет координаты положения (как правило, места и ориентации) дистального конца 20. Способ определения местоположения, описанный выше, применяется в системе CARTOTM и подробно описан в патентах и патентных заявках, ссылки на которые приведены выше.
Процессор 26, как правило, состоит из компьютера общего назначения с фронтальной частью и интерфейсом, выполненных с возможностью приема входных сигналов от зонда 18 и контроля других компонентов панели управления 24. Для осуществления описанных в настоящем документе функций процессор 26 может быть снабжен специальным программным обеспечением. Программу можно загрузить в панель управления 24 в электронной форме по сети или с носителей, например оптических, магнитных или электронных устройств памяти. В качестве альтернативы все или некоторые функции процессора 26 можно реализовать с помощью специальных или запрограммированных цифровых аппаратных элементов.
Интерфейс ввода-вывода 30 позволяет панели управления 24 взаимодействовать с зондом 18. На основании сигналов от зонда 18 (через интерфейс 30) и от других компонентов системы 10 процессор 26 выводит на дисплей 32 оператора 16 карту 34 электрофизиологической активности сердца, а также дает возможность оператору 16 визуально следить за положением дистального конца 20 в теле пациента, получать информацию и рекомендации в отношении производимой процедуры. В описываемом варианте осуществления процессор 26 осуществляет прием входных сигналов от зонда и добавляет на карту 34 только те координаты местоположения, в которых контактное давление дистального конца 20 на стенку сердца 12 находится в пределах заданного диапазона. В некоторых вариантах осуществления настоящего изобретения дисплей 32 дает возможность оператору 16 визуально отслеживать контактное давление. Если контактное давление выходит за пределы заданного диапазона, оператору 16 может быть предложено изменить положение зонда 18.
Кроме того или в качестве альтернативы, система 10 может быть снабжена автоматическим механизмом (не показан) передвижения и управления зондом 18 внутри тела пациента 14. Такие механизмы, как правило, способны контролировать как продольное перемещение зонда 18 (вперед/назад), так и поперечное перемещение дистального конца 20 зонда 18 (отклонение вбок/поворот). В таких вариантах осуществления процессор 26 генерирует управляющий входной сигнал для контроля движения зонда 18 с помощью сигналов с датчика магнитного поля в зонде 18. Эти сигналы указывают местонахождение дистального конца 20 зонда 18, и давление на дистальный конец 20 (пояснение ниже). Кроме того или в качестве альтернативы, результаты определений можно использовать для автоматического управления зондом внутри тела. Определение давления можно использовать для продвижения зонда к соответствующему местоположению и для повышения безопасности процедуры (предотвращение избыточного давления зонда на ткани).
Хотя на Фиг.1 показана определенная конфигурация системы, возможна реализация и других вариантов осуществления настоящего изобретения в других системных конфигурациях, которые также будут считаться не противоречащими сущности и охвату настоящего изобретения. Например, описанные ниже способы могут реализовываться с использованием датчиков положения других типов, например датчиков, измеряющих сопротивление, или ультразвуковых датчиков. Используемый в настоящем документе термин «датчик положения» относится к элементу, вмонтированному в зонд 18, передающему на панель управления 24 сигналы, по которым определяются координаты элемента. Датчик положения может, таким образом, представлять собой приемник на зонде, генерирующий сигналы для блока управления на основании энергии, получаемой датчиком; или он может представлять собой передатчик, излучающий энергию, которую воспринимает внешний приемник. Помимо этого, сходным образом можно применять нижеописанные способы для создания карты и определения с использованием не только катетеров, но также датчиков других типов как в сердце, так и в других органах и участках тела.
На Фиг.2 представлен схематичный вид сбоку дистального конца 20 зонда 18 в соответствии с одним из вариантов осуществления настоящего изобретения. В частности, на Фиг.2 показаны функциональные элементы дистального конца 20, используемые при создании карты электрической активности сердца. Электрод 40 в дистальном наконечнике 46 зонда воспринимает электрические сигналы в ткани. Электрод 40, как правило, выполнен из металла, например платинового/иридиевого сплава, или из другого подходящего материала. В качестве альтернативы для этой цели можно использовать множественные электроды (не показаны), расположенные вдоль зонда.
Датчик положения 42 генерирует сигнал, который принимает панель управления 24, указывающий координаты местоположения дистального наконечника 46. Датчик положения 42 может состоять из одной или нескольких миниатюрных катушек, но, как правило, состоит из множества катушек, ориентированных вдоль разных осей. В качестве альтернативы датчик положения 42 может состоять либо из магнитного датчика другого типа, электрода, выполняющего функцию датчика положения, либо из датчиков положения других типов, например датчиков, измеряющих сопротивление, или ультразвуковых датчиков. Хотя на Фиг.2 показан зонд с одним датчиком положения, в вариантах осуществления настоящего изобретения можно использовать зонды с более чем одним датчиком положения.
В альтернативном варианте осуществления датчик положения 42 и генераторы магнитного поля 22 могут поменяться ролями. Другими словами, возбуждающий контур 28 может приводить в действие генератор магнитного поля в дистальном конце 20, который будет создавать магнитные поля. Катушки в генераторе 22 могут быть выполнены с возможностью регистрации полей и генерирования сигналов, указывающих амплитуды компонентов этих магнитных полей. Процессор 26 принимает и обрабатывает эти сигналы, определяя координаты положения дистального конца 20 внутри сердца 12.
Датчик усилия 44 при контакте дистального наконечника 46 и ткани эндокарда сердца 12 принимает сигнал, который передается на панель управления, указывающий давление дистального наконечника 46 на ткань. В одном из вариантов осуществления датчик усилия может состоять из датчика положения 42, передатчика магнитного поля и механических элементов на дистальном конце 20, с помощью которых датчик, в зависимости от величины отклонения дистального наконечника в сторону, принимает сигнал, пропорциональный давлению. Более подробно эти виды зонда и датчика усилия описаны в заявках на патент США №№ 2009/0093806 и 2009/0138007, раскрытие информации по которым в силу ссылки на них полностью включается в настоящий документ. В качестве альтернативы на дистальном конце 20 может быть вмонтирован контактный датчик другого типа.
На Фиг.3 представлена блок-схема, на которой схематически показан способ управляемого картирования, основанный на определении качества контакта, в соответствии с одним из вариантов осуществления настоящего изобретения. После установки оператором 16 зонда 18 (стадия 50) процессор 26 обрабатывает сигналы от датчика усилия 44 и определяет качество контакта, т.е. давление дистального наконечника 46 зонда 18 на ткань эндокарда сердца 12 (стадия 52). Пониженное давление может указывать на плохой контакт электрода 40 на дистальном наконечнике 46 с тканью эндокарда. Повышенное давление означает, что электрод 40 слишком сильно давит на ткань эндокарда. Хотя в описываемом примере для определения качества контакта используется давление, для этой цели могут быть использованы и другие способы, например определение электрического полного сопротивления.
Если характеристики контакта выходят за пределы указанного диапазона (стадия 54), на дисплее 32 панели управления 24 отобразится значение давления, определенного с помощью датчика усилия 44. Панель управления может подать сигнал тревоги, если давление слишком низкое или слишком высокое, а также может предложить оператору 16 переместить зонд 18 (стадия 56), после чего процедура вернется к стадии 50. Например, когда сила давления наконечника катетера на стенку сердца составляет 5 грамм или более, качество контакта считается достаточным для создания карты, тогда как давление более 35 грамм может быть опасным. Кроме того или в качестве альтернативы, величина давления может использоваться в автоматическом механизме управления с обратной связью, обеспечивающем передвижение и управление зондом 18, как это описывалось выше, для того чтобы дистальный наконечник 46 зонда 18 контактировал с эндокардом в надлежащем месте с надлежащей силой давления на ткань.
Возвращаясь к Фиг.3, если качество контакта находится в пределах заданного диапазона (стадия 54), процессор 26 вносит данное местоположение на карту, то есть регистрирует координаты датчика положения 42 и величину электрического сигнала с электрода 40 (стадия 58) и обновляет карту 34. Наконец, если оператор 16 пожелает собрать дополнительные данные для создания карты, процедура вернется к стадии 50, и так до тех пор, пока карта не будет создана.
Хотя использование датчика положения 42 и датчика усилия 44 описано выше в контексте применения катетера для сбора электрофизиологических данных для картирования, принципы настоящего изобретения можно сходным образом применить в других терапевтических и диагностических процедурах, в которых используются инвазивные зонды, как в сердце 12, так и в других органах тела. Например, устройства и методики, используемые в системе 10, можно применять, внеся соответствующие изменения, при управляемом картировании других физиологических параметров, таких как температура или химическая активность, как в сердце, так и в других органах. Кроме того или в качестве альтернативы, как упоминалось выше, управление контактом можно использовать для определения координат (без измерения других параметров) при физическом картировании поверхности или объема полости тела.
Соответствующие структуры, материалы, действия и эквиваленты всех средств или стадий, а также исполнительные элементы, перечисленные в формуле изобретения ниже, должны включать любые структуры, материала или действия для осуществления функций в комбинации с другими заявленными элементами. Настоящее описание приводится исключительно для целей пояснения, оно не считается исчерпывающим или ограничивающимся приведенным в настоящем документе. Без отступления от сущности и охвата настоящего описания специалистам в области могут быть очевидны многие модификации и вариации. Настоящий вариант осуществления был выбран и описан для наилучшего объяснения принципов изобретения и его практического применения, а также для пояснения специалистам в области прочих различных вариантов осуществления с различными модификациями, пригодных для применения в частных случаях.
Предполагается, что прилагаемая формула изобретения охватывает все особенности и преимущества в рамках сущности и охвата настоящего описания. Так как специалисты в данной области могут быстро создать множество модификаций и изменений, предполагается, что описание не будет ограничено лишь описанными здесь вариантами осуществления. Соответственно, нужно учитывать, что все вариации, модификации и эквиваленты также считаются не противоречащими сущности и охвату настоящего описания.
Группа изобретений относится к медицине, а именно к способам и устройствам картирования. Способ картирования включает этапы, на которых используют зонд, имеющий дистальный конец с дистальным наконечником и электродом. Зонд выполнен с возможностью введения в полость тела субъекта и содержит датчик контактного усилия. Датчик контактного усилия содержит датчик положения и передатчик магнитного поля. Дистальный наконечник выполнен с возможностью определения электрической активности ткани. Далее обеспечивают контакт дистального наконечника зонда с тканью в полости тела субъекта, генерируют сигналы контактного усилия датчиком положения и магнитным передатчиком, которое указывает давление, прикладываемое дистальным наконечником к ткани, перемещают зонд в множество местоположений в полости тела, принимают сигналы от датчика положения и определяют координаты положения дистального конца зонда, принимают сигналы от датчика положения, измеренные зондом в соответствующих местоположениях внутри полости тела субъекта, измеряют в каждом из соответствующих местоположений отклонение дистального наконечника в качестве указателя давления, оказываемого на ткань дистальным наконечником, и определяют соответствующее качество контакта между зондом и тканью в полости тела в каждом из соответствующих местоположений. Далее отклоняют входные сигналы, для которых соответствующее качество контакта находится за пределами заданного диапазона, осуществляют сбор точек отображения, включая координату, считываемую датчиком положения, и электрический сигнал от электрода, которые указывают электрическую активность ткани, создают или обновляют карту полости тела с использованием точек отображения для сигналов, которые не были отклонены. Использование изобретения обеспечивает получение точных данных при электрокартировании, а также снижение травматичности стенок полостей тела в ходе проведения операции. 2 н. и 16 з.п. ф-лы, 3 ил.
1. Способ картирования, включающий в себя этапы, на которых:
используют зонд, имеющий дистальный конец с дистальным наконечником и электродом, сконфигурированный для введения в полость тела субъекта и содержащий датчик контактного усилия, который содержит датчик положения и передатчик магнитного поля, при этом дистальный наконечник сконфигурирован для определения электрической активности ткани,
обеспечивают контакт дистального наконечника зонда с тканью в полости тела субъекта,
генерируют сигналы контактного усилия датчиком положения и магнитным передатчиком, которое указывает давление, прикладываемое дистальным наконечником к ткани,
перемещают зонд в множество местоположений в полости тела,
принимают сигналы от датчика положения и определяют координаты положения дистального конца зонда,
принимают сигналы от датчика положения, измеренные зондом в соответствующих местоположениях внутри полости тела субъекта;
измеряют в каждом из соответствующих местоположений отклонение дистального наконечника в качестве указателя давления, оказываемого на ткань дистальным наконечником, и определяют соответствующее качество контакта между зондом и тканью в полости тела в каждом из соответствующих местоположений;
отклоняют входные сигналы, для которых соответствующее качество контакта находится за пределами заданного диапазона;
осуществляют сбор точек отображения, включая координату, считываемую датчиком положения и электрический сигнал от электрода, которые указывают электрическую активность ткани,
создают или обновляют карту полости тела с использованием точек отображения для сигналов, которые не были отклонены.
2. Способ по п. 1, в котором полость тела представляет собой камеру сердца.
3. Способ по п. 1, в котором определение соответствующего качества контакта содержит измерение давления, оказанного на дистальный конец зонда.
4. Способ по п. 3, в котором отклонение сигналов содержит отклонение результатов измерений, если давление ниже заданной нижней границы.
5. Способ по п. 3, в котором отклонение сигналов содержит отклонение результатов измерений, если давление выше заданной верхней границы.
6. Способ по п. 3, дополнительно содержащий этап, на котором осуществляют автоматическое управление зондом в зависимости от измеренного давления для перемещения зонда внутри полости тела.
7. Способ по п. 1, в котором определение соответствующего качества контакта содержит измерение электрического полного сопротивления между зондом и тканью.
8. Способ по п. 1, в котором этап создания карты содержит этап, на котором на карту добавляют метки, указывающие соответствующее качество контакта в одном или более местоположениях.
9. Устройство картирования, содержащее:
зонд (18), имеющий дистальный конец (20), выполненный с возможностью введения в полость тела и содержащий контактный датчик для определения соответствующего качества контакта между зондом (18) и тканью во множестве местоположений в полости тела; и
панель (24) управления, выполненную с возможностью приема входных сигналов от зонда (18), указывающих качество контакта в каждом соответствующем местоположении, для отклонения входных сигналов, для которых соответствующее качество контакта находится за пределами заданного диапазона, и для создания карты (34) полости тела с использованием неотклоненных входных сигналов,
при этом зонд (18) содержит датчик (42) положения, выполненный с возможностью подачи на панель (24) управления входного сигнала, указывающего координаты дистального конца (20) зонда (18) внутри полости тела, и
контактный датчик содержит электрод для измерения электрического полного сопротивления между зондом и тканью.
10. Устройство по п. 9, в котором полость тела представляет собой камеру сердца.
11. Устройство по п. 9, в котором зонд (18) содержит физиологический датчик для измерения физиологического параметра в соответствующих местоположениях внутри полости тела субъекта, а панель (24) управления выполнена с возможностью картирования физиологического параметра по всей полости.
12. Устройство по п. 11, в котором физиологический датчик содержит электрод, выполненный с возможностью генерации сигналов, указывающих электрическую активность ткани.
13. Устройство по п. 9, в котором контактный датчик выполнен с возможностью измерения давления, оказанного на дистальный конец зонда.
14. Устройство по п. 13, в котором контактный датчик содержит датчик усилия в зонде.
15. Устройство по п. 13, в котором панель управления выполнена с возможностью отклонения измеренных точек, если давление ниже заданной нижней границы.
16. Устройство по п. 13, в котором панель управления выполнена с возможностью отклонения измеренных точек, если давление выше заданной верхней границы.
17. Устройство по п. 13, в котором панель управления выполнена с возможностью автоматического управления зондом в зависимости от измеренного давления для перемещения зонда внутри полости тела.
18. Устройство по п. 9, в котором панель управления выполнена с возможностью добавления на карту меток, указывающих соответствующее качество контакта в одном или более местоположениях.
| US 2006200049 A1, 07.09.2006 | |||
| US 6052618 A, 18.04.2000 | |||
| US 2007276185 A1, 29.11.2007 | |||
| US 2008097475 A1, 24.04.2008 | |||
| НЕЙРОНАВИГАЦИОННАЯ ЭНДОСКОПИЧЕСКАЯ СИСТЕМА | 2004 |
|
RU2290055C2 |

