Настоящее изобретение в основном относится к инвазивным зондам и, в частности, к калибровочным датчикам давления инвазивных зондов.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Многие медицинские манипуляции предусматривают размещение в теле пациента различных объектов, таких как датчики, трубки, катетеры, элементы капельниц и имплантаты. Для слежения за такими объектами разработаны системы определения положения указанных объектов. Одним из известных в данной области техники способов определения положения является магнитное позиционирование. В системе магнитного позиционирования генераторы магнитного поля обычно размещаются возле пациента. Датчик магнитного поля, установленный на дистальном конце зонда, под воздействием указанного магнитного поля генерирует электрические сигналы, которые подвергаются обработке для определения координат положения дистального конца зонда. Указанные способы и системы описаны в патентах США №№ 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, международной заявке согласно Договору о патентной кооперации (PCT) № WO 1996/005768 и патентных заявках США №№ 2002/0065455 A1, 2003/0120150 A1 и 2004/0068178 A1, которые включены в настоящее описание изобретения посредством ссылки.
При размещении зонда в теле пациента может потребоваться, чтобы дистальный наконечник зонда находился в непосредственном контакте с тканью тела. Данный контакт можно контролировать, например, посредством измерения давления в зоне контакта между дистальным наконечником зонда и тканью тела. В патентных заявках США №№ 2007/0100332, 2009/0093806 и 2009/0138007, содержание которых включено в настоящий документ посредством ссылки, описаны способы измерения давления в зоне контакта между дистальным наконечником катетера и тканями полости тела пациента с использованием датчика усилия, встроенного в катетер. Дистальный наконечник катетера связан с дистальным концом вводимой части катетера упругим элементом, таким как пружина, который деформируется при воздействии на дистальный наконечник катетера усилия, когда указанный наконечник прижимается к эндокардиальной ткани. Магнитный датчик положения катетера измеряет отклонение (положения и ориентации) дистального наконечника катетера относительно дистального конца вводимой части. Перемещение дистального наконечника катетера относительно вводимой части катетера свидетельствует о наличии деформации упругого элемента и, таким образом, способствует определению величины давления.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Согласно одному примеру осуществления настоящего изобретения предлагается устройство калибровки, содержащее зажимное приспособление, исполнительный элемент, измерительный датчик и процессор данных калибровки. Зажимное приспособление обеспечивает крепление дистального конца медицинского зонда. Исполнительный элемент выполнен с возможностью прижимания к дистальному наконечнику зонда и приложения к дистальному наконечнику множества векторов силы, имеющих соответствующие амплитуды и углы относительно дистального конца зонда с целью деформирования дистального наконечника относительно указанного дистального конца. Измерительный датчик предназначен для измерения амплитуды векторов силы, приложенных исполнительным элементом. Процессор данных калибровки осуществляет прием от зонда первых данных измерений, указывающих деформацию дистального наконечника под воздействием векторов силы, прием от измерительного устройства вторых данных измерений, указывающих амплитуду векторов силы, и расчет на основании информации об углах, а также первых и вторых данных измерений калибровочных коэффициентов, обеспечивающих определение векторов силы как функции от первых данных измерений.
В некоторых примерах осуществления устройство по настоящему изобретению включает плоскую поверхность, связанную с исполнительным элементом и предназначенную для приложения давления к дистальному наконечнику зонда. В описанном примере осуществления настоящего изобретения дистальный конец зонда включает в себя генератор магнитного поля, создающий магнитное поле, причем дистальный наконечник зонда содержит датчик магнитного поля, обеспечивающий измерение магнитного поля и получение первых данных измерений при наличии магнитного поля. В другом примере осуществления устройство по настоящему изобретению включает в себя множество генераторов магнитного поля, размещенных за пределами зонда и создающих соответствующие магнитные поля, причем дистальный конец и дистальный наконечник зонда содержат первый и второй датчики магнитного поля, соответственно, которые обеспечивают измерение магнитного поля и получение первых данных измерений.
В еще одном примере осуществления устройство по настоящему изобретению включает держатель для исполнительного элемента, причем управление указанным держателем осуществляется процессором данных калибровки с целью приложения векторов силы, имеющих соответствующие амплитуды и углы. В другом примере осуществления настоящего изобретения зажимное приспособление обеспечивает возможность поворота зонда относительно его продольной оси, а процессор данных калибровки выполнен с возможностью определения осевой асимметрии деформации дистального наконечника посредством обработки первых данных измерений, полученных при повороте зонда. В еще одном примере осуществления настоящего изобретения процессор данных калибровки выполнен с возможностью хранения коэффициентов калибровки в устройстве памяти, подключенном к зонду. Указанное устройство памяти включает электронное стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ).
В соответствии с данным примером осуществления настоящего изобретения предлагается также способ калибровки, включающий крепление в зажимном приспособлении дистального конца медицинского зонда, содержащего дистальный наконечник; приложение исполнительным элементом давления к дистальному наконечнику таким образом, чтобы обеспечить приложение к дистальному наконечнику множества векторов силы, имеющих соответствующие амплитуды и углы относительно дистального конца зонда, которые вызывают деформацию дистального наконечника относительно дистального конца зонда; прием от зонда первых данных измерений, указывающих деформацию дистального наконечника под воздействием векторов силы; прием от измерительного устройства, связанного с исполнительным элементом, вторых данных измерений, указывающих амплитуду векторов силы; а также расчет на основании информации об углах, первых и вторых данных измерений коэффициентов калибровки, обеспечивающих определение векторов силы как функции от первых данных измерений.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Настоящее изобретение описано в данном документе в качестве примера осуществления со ссылкой на прилагаемые рисунки:
Фиг.1 - схематическое представление системы калибровки для реагирующего на давление катетера в соответствии с примером осуществления настоящего изобретения;
Фиг.2 - структурная схема, иллюстрирующая способ калибровки реагирующего на давление катетера в соответствии с примером осуществления настоящего изобретения;
Фиг.3 - схематическое представление системы калибровки для реагирующего на давление катетера в соответствии с другим примером осуществления настоящего изобретения; и
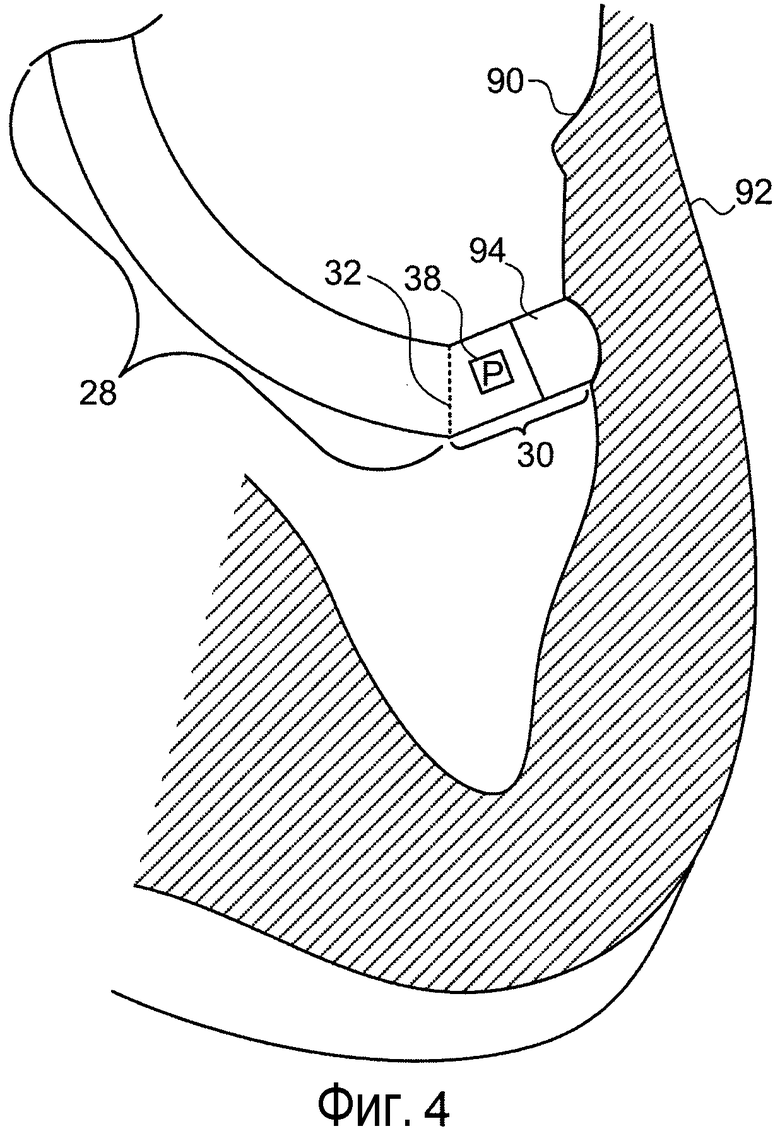
Фиг.4 - подробное схематическое представление дистального наконечника реагирующего на давление катетера, находящегося в контакте с эндокардиальной тканью, в соответствии с примером осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Некоторые инвазивные зонды содержат датчики давления для измерения давления контакта между зондом и тканями тела пациента. Например, дистальный наконечник сердечного катетера может включать датчик давления, который деформируется в результате давления дистального наконечника на эндокардиальную ткань. Датчик положения, размещенный в катетере, измеряет отклонения дистального наконечника и, таким образом, определяет контактное давление. Однако на практике в большинстве случаев соотношение между фактическим контактным давлением и показаниями датчика положения отличается для разных катетеров.
Для обеспечения точного измерения давления в соответствии с примерами осуществления настоящего изобретения предлагаются способы и устройства для калибровки зондов (например, катетеров), содержащих датчики давления. В некоторых примерах осуществления настоящего изобретения устройство калибровки включает зажимное приспособление для крепления катетера, исполнительный элемент, содержащий плоскую поверхность для приложения давления к дистальному наконечнику катетера, и датчик давления, связанный с исполнительным элементом и предназначенный для измерения силы воздействия исполнительного элемента на дистальный наконечник. Исполнительный элемент можно устанавливать и ориентировать в автоматическом режиме таким образом, чтобы он контактировал с наконечником катетера с различных углов и, таким образом, механическое усилие может прикладываться к дистальному наконечнику как в продольном, так и наклонном направлении (для имитации как фронтального, так и бокового контакта катетера с тканями тела пациента). В некоторых вариантах осуществления настоящего изобретения обеспечивается возможность поворота катетера в зажимном приспособлении для определения осевой асимметрии характеристики давления катетера.
Как часть процедуры калибровки устройство калибровки может прикладывать к дистальному наконечнику катетера силу в требуемом диапазоне амплитуд под различными углами. По мере приложения исполнительным элементом к дистальному наконечнику силы заданной амплитуды устройство калибровки регистрирует сигналы датчика положения катетера с целью определения параметров калибровки.
В случае приложения исполнительным элементом к катетеру множества векторов силы, имеющих соответствующие углы и амплитуды, дистальный наконечник деформируется под воздействием указанных векторов силы, а датчик давления катетера обеспечивает измерение деформации (то есть отклонения) дистального наконечника катетера. Процессор данных калибровки принимает данные деформации от катетера и данные давления от датчика давления исполнительного элемента. На основании данных деформации и известных векторов силы процессор данных калибровки осуществляет расчет коэффициентов калибровки для определения вектора силы как функции от деформации наконечника. Таким образом, катетеры, реагирующие на давление, можно калибровать в пределах всего предполагаемого диапазона условий контакта катетера с тканями тела. Кроме того, в процессе калибровки процессор данных калибровки может определять и корректировать изменения характеристик давления различных катетеров.
В некоторых вариантах осуществления настоящего изобретения процессор данных калибровки выполняет управление исполнительным элементом. Для калибровки конкретного катетера процессор данных калибровки подает на исполнительный элемент команду приложения к наконечнику катетера необходимой последовательности векторов силы (то есть силы различной амплитуды, направленной под разными углами). В другом или дополнительном варианте осуществления изобретения оператор вручную прижимает исполнительный элемент к наконечнику катетера, чтобы вызвать деформацию.
В некоторых вариантах осуществления настоящего изобретения коэффициенты калибровки запоминаются в виде матрицы калибровки в энергонезависимой памяти, подключенной к катетеру. В процессе последующего применения катетера в медицинской системе фактическое давление, которое оказывает дистальный наконечник катетера на ткани тела, может быть определено с высокой точностью на основе измерения отклонения и использования коэффициентов калибровки, записанных в виде матрицы.
На Фиг.1 представлена система калибровки 20 для катетера, реагирующего на давление, в соответствии с примером осуществления настоящего изобретения. Система 20 включает устройство калибровки 22, связанное с блоком калибровки 24. В описанном далее примере осуществления настоящего изобретения система 20 используется для калибровки зонда, который в данном примере представляет собой катетер 26, предназначенный для исследования сердца или других органов тела человека в терапевтических и (или) диагностических целях.
Катетер 26 содержит дистальный конец 28, а также дистальный наконечник 30, связанный с дистальным концом соединительным элементом 32. При приложении достаточного давления к дистальному наконечнику 30 (или наоборот, если дистальный наконечник оказывает достаточное давление на поверхность, например на ткани тела), катетер 26 изгибается в области соединительного элемента 32, в результате чего дистальный наконечник 30 отклоняется относительно дистального конца 28.
Дистальный конец 28 и дистальный наконечник 30 катетера покрыты эластичным изолирующим материалом 34. Область соединительного элемента 32 также покрыта эластичным изолирующим материалом, который может быть аналогичным материалу 34 или представлять собой материал, специально адаптированный для обеспечения свободного изгиба и сжатия соединительного элемента (данный материал удален на Фиг.1 для представления внутренней структуры катетера). Дистальный наконечник 30 обычно является относительно жестким по сравнению с дистальным концом 28.
Дистальный наконечник 30 соединен с дистальным концом 28 упругим элементом 36. На Фиг.1 упругий элемент представлен в форме винтовой пружины, однако в других вариантах осуществления изобретения для данной цели могут использоваться другие типы упругих элементов. Упругий элемент 36 обеспечивает в ограниченных пределах возможность относительного перемещения дистального наконечника 30 и дистального конца 28 при воздействии силы на дистальный наконечник.
Дистальный наконечник 30 содержит магнитный датчик положения 38. Датчик 38 содержит одну или большее количество микрокатушек и обычно включает множество катушек, ориентированных вдоль различных осей. Дистальный конец 28 включает малогабаритный встроенный генератор магнитного поля 40, расположенный рядом с упругим элементом 36. Обычно генератор магнитного поля 40 содержит катушку, через которую проходит ток, подаваемый через катетер от блока калибровки 24.
В другом варианте осуществления изобретения датчик 38 положения может включать магнитный датчик другого типа, электрод, выполняющий функцию преобразователя положения, или преобразователи положения других типов, например импедансные или ультразвуковые датчики положения. Несмотря на то, что на Фиг.1 представлен зонд, содержащий один датчик положения, в других примерах осуществления настоящего изобретения, описанных далее, используются зонды, включающие более одного датчика положения.
Магнитное поле, созданное генератором магнитного поля 40, вызывает генерирование в катушках датчика 38 электрических сигналов, имеющих частоту, соответствующую частоте сигналов возбуждения генератора магнитного поля. Амплитуда указанных сигналов изменяется в зависимости от расположения и ориентации дистального наконечника 30 относительно дистального конца 28. Процессор данных калибровки 42, размещенный в блоке калибровки 24, осуществляет обработку указанных сигналов с целью определения осевого смещения и амплитуды отклонения дистального наконечника 30 относительно дистального конца 28. (В связи с осевой симметрией поля, генерированного катушкой, при использовании в генераторе магнитного поля 40 одной катушки может быть определена только амплитуда отклонения, но не его направление. В другом варианте осуществления изобретения генератор магнитного поля 40 может содержать не менее двух катушек и таким образом обеспечивать определение направления отклонения). Амплитуды смещения и отклонения суммируются посредством сложения векторов для определения полной амплитуды перемещения дистального наконечника 30 относительно дистального конца 28.
Перемещение дистального наконечника 30 относительно дистального конца 28 представляет собой коэффициент деформации упругого элемента 36. Таким образом, генератор магнитного поля 40 и датчик 38 вместе представляют собой систему измерения давления. Вследствие одновременного измерения смещения и отклонения указанная система измерения давления обеспечивает точное измерение давления независимо от направления приложения давления к дистальному наконечнику 30 - фронтально или под углом. Дополнительная информация, касающаяся зонда и датчика положения такого типа, представлена в патентных заявках США №№ 2007/0100332, 2009/0093806 и 2009/0138007, указанных выше.
В некоторых примерах осуществления настоящего изобретения катетер 26 дополнительно содержит энергонезависимую память 44, такую как электронное стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), выполненное с возможностью хранения коэффициентов калибровки, рассчитанных в процессе калибровки. Как указано выше, при последующем использовании катетера в медицинской системе фактическое давление, которое оказывает дистальный наконечник катетера на ткани тела, может быть определено с высокой степенью точности посредством измерения отклонения и использования коэффициентов калибровки, записанных в памяти 44.
Устройство 22 калибровки содержит зажимное приспособление 46, предназначенное для крепления дистального конца катетера 26, исполнительный элемент 48 с плоской поверхностью 50 и измерительное устройство 52, такое как датчик давления, связанный с исполнительным элементом. Как указано выше, катетер 26 может поворачиваться в зажимном приспособлении 46 для определения осевой асимметрии характеристики давления катетера. В некоторых примерах осуществления настоящего изобретения блок калибровки 24 обеспечивает управление поворотом катетера 26 в зажимном приспособлении 46. В другом примере осуществления настоящего изобретения оператор (не показан) вручную осуществляет поворот катетера в зажимном приспособлении.
При заданном положении исполнительного элемента 48 указанный элемент прижимает плоскую поверхность 50 к дистальному наконечнику 30, прилагая, таким образом, к дистальному наконечнику силу заданной величины под заданным углом. Датчик давления 52 измеряет величину силы, с которой исполнительный элемент 48 воздействует на дистальный наконечник 30. Одновременно блок калибровки 24 принимает сигналы от датчика положения 38, указывающие отклонение дистального наконечника. Процессор данных калибровки 42, размещенный в блоке калибровки, осуществляет расчет коэффициентов калибровки, представляющих зависимость между измеренным отклонением дистального наконечника и заданным вектором силы, приложенной исполнительным элементом.
Исполнительный элемент 48 и зонд 26 подключены к блоку калибровки 24 через соответствующие средства подключения (например, кабели и разъемы). Блок калибровки 24 включает процессор данных калибровки 42 и память 54. Процессор 42 обычно включает универсальный компьютер, содержащий соответствующие схемы предварительной обработки данных и интерфейса, предназначенные для приема сигналов от датчика положения 38 и датчика давления 52, а также для управления векторами силы, прилагаемой исполнительным элементом 48. Программное обеспечение процессора 42 программируется таким образом, чтобы обеспечить выполнение функций, описанных в настоящем документе. Указанное программное обеспечение может быть загружено в процессор 42 в электронном виде, например, передано по сети или предоставлено на материальном носителе, таком как оптический, магнитный или электронный носитель информации. В другом примере осуществления изобретения некоторые или все функции процессора 42 осуществляются специализированными или программируемыми компонентами цифровых аппаратных средств.
В некоторых примерах осуществления настоящего изобретения исполнительный элемент 48 закреплен на автоматизированной стойке (не показана на рисунке), которая обеспечивает позиционирование исполнительного элемента в требуемом положении и под необходимым углом относительно дистального конца катетера 26. Автоматизированная стойка включает соответствующие механические и электрические компоненты, такие как электродвигатели, для позиционирования и ориентации исполнительного элемента 48. Обычно управление автоматизированной стойкой осуществляется процессором данных калибровки 42 с целью обеспечения приложения исполнительным элементом к наконечнику катетера требуемых векторов силы.
На Фиг.2 представлена структурная схема, демонстрирующая способ калибровки реагирующего на давление катетера в соответствии с примером осуществления настоящего изобретения. Для калибровки катетера 26 оператор закрепляет его в зажимном приспособлении 44 (этап 60). Исполнительный элемент 48 прижимает плоскую поверхность 50 к дистальному наконечнику 30 под определенным углом (этап 62). Давление плоской поверхности 50 на дистальный наконечник 30 вызывает изгиб катетера 26 в области соединительного элемента 32, что приводит к отклонению дистального наконечника. Датчик положения 38, расположенный в дистальном наконечнике 30, подает сигнал, указывающий отклонение дистального наконечника относительно дистального конца 28.
Блок калибровки 24 принимает данные отклонения от датчика положения 38 и данные величины силы от датчика давления 52 (этап 64).
Далее процессор 42 осуществляет расчет коэффициента калибровки с целью калибровки отклонения зонда 26 на основании данных величины силы, угла приложения силы и данных отклонения (этап 66). Коэффициент калибровки, представляющий зависимость данных отклонения от данных вектора силы, полученных от датчика давления 52 при заданном угле воздействия, определяет силу, действующую на дистальный наконечник 30, на основании данных измерения отклонения. Другими словами, указанный коэффициент калибровки обеспечивает преобразование данных отклонения наконечника 30 в фактическое значение давления при заданном угле воздействия.
При необходимости определения большего числа точек калибровки (этап 68) осуществляется возврат к указанному выше этапу 62, на котором процессор данных калибровки 42 подает на исполнительный элемент 48 команду приложения к дистальному наконечнику 30 другого вектора силы. Использование различных векторов силы в пределах определенного диапазона амплитуд и направлений (то есть углов) позволяет системе 20 определить характеристику изгиба катетера в широком диапазоне геометрических параметров функционирования. Возвращаясь к этапу 68, если не требуется получения большего числа точек калибровки, то процессор 42 осуществляет запись матрицы коэффициентов калибровки в памяти 44 зонда (этап 70), и выполнение процесса в соответствии с данным способом калибровки завершается.
На Фиг.3 представлена система калибровки 78 для реагирующего на давление катетера в соответствии с другим вариантом осуществления настоящего изобретения. В системе 78 дистальный конец 28 катетера 26 содержит второй датчик положения 80, предназначенный для определения координат положения и ориентации указанного дистального конца. Датчик положения 80 применяется совместно с внешними генераторами магнитного поля 82, которые обычно устанавливаются в структуре 84, такой как система позиционирования CARTOTM производства компании Biosense Webster Inc. (Дайамонд Бар, шт. Калифорния). Система позиционирования CARTOTM и датчики положения 38 и 80 используются для определения положения дистального конца 28 и отклонения дистального наконечника 30.
Генераторы магнитного поля 82 обеспечивают создание магнитных полей, параметры которых отличаются по времени и (или) частоте от параметров поля, созданного генератором магнитного поля 40. Например, ток, подаваемый на генератор магнитного поля 40, может иметь определенную частоту в пределах от приблизительно 16 кГц до 25 кГц, а возбуждение генераторов магнитного поля 82 осуществляется на других частотах. В дополнительном или другом примере осуществления изобретения функционирование генераторов 40 и 82 может проходить в режиме временного разделения.
Схема возбуждения (например, в блоке калибровки 24) подает сигнал возбуждения на генераторы магнитного поля 82 (обычно содержащие катушки) для создания магнитных полей. Датчики положения 38 и 80 под воздействием указанных магнитных полей генерируют электрические сигналы. Процессор 42 блока калибровки 24 осуществляет обработку сигналов, полученных от датчиков положения 38 и 80, для определения координат положения и ориентации двух указанных датчиков положения (и, следовательно, дистального наконечника 30 и дистального конца 28). Дополнительные аспекты способа позиционирования на основе использования указанной выше системы позиционирования CARTOTM подробно описаны в патентах США №№ 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, международной заявке PCT № WO 1996/005768 и патентных заявках США №№ 2002/0065455 A1, 2003/0120150 A1 и 2004/0068178 A1, указанных выше.
Возвращаясь к этапу 64 структурной схемы, представленной на Фиг.2, в примерах осуществления настоящего изобретения, включающих систему позиционирования CARTOTM (или любую другую допустимую систему генераторов магнитного поля), выходные сигналы датчиков положения 38 и 80 указывают положение дистального наконечника 30 и дистального конца 28, соответственно. Аналогично этапу 66 сигналы, поданные датчиками положения 38 и 80, используются процессором 42 для расчета отклонения дистального наконечника 30 относительно дистального конца 28.
В другом варианте осуществления изобретения процессор 42 выполняет сравнение выходных сигналов датчиков 38 и 80 для обнаружения нежелательного изгиба катетера 26. Например, при приложении силы к дистальному наконечнику 30 в продольном направлении (то есть вдоль оси катетера) упругий элемент 36 сжимается, в результате чего дистальный наконечник в продольном направлении приближается к дистальному концу 28, но не сгибается. Если в данном случае выходные сигналы датчиков положения 38 и 80 указывают, что дистальный наконечник 30 изогнут или прогнулся, то процессор 42 определяет такую ситуацию как признак неисправности калибруемого катетера или сбоя процедуры калибровки. Процессор в этом случае подает аварийный сигнал или другим способом уведомляет о возможной неисправности.
На Фиг.4 представлено подробное схематическое изображение дистального наконечника 30, находящегося в контакте с эндокардиальной тканью 90 сердца 92, в соответствии с примером осуществления настоящего изобретения. В представленном примере наконечник 30 включает электрод 94. При проведении некоторых электрофизиологических исследований с целью диагностики или терапии, таких как интракардиальное электрическое картирование, важно поддерживать требуемое усилие прижима электрода 94 к ткани 90. Когда медицинский работник (не показан) прижимает дистальный наконечник 30 к эндокардиальной ткани 90, катетер 26 изгибается в области соединительного элемента 32. Для обеспечения хорошего контакта между электродом дистального наконечника и тканью требуется приложить достаточное усилие. Недостаточный электрический контакт может привести к получению неточных данных. С другой стороны, приложение избыточной силы может вызвать деформирование ткани и результирующее искажение карты.
При прижимании наконечника 30 к ткани 90 датчик положения 38 осуществляет получение данных об отклонении наконечника 30 относительно дистального конца 28. Система медицинской визуализации (например, система картирования - не показана) с помощью коэффициентов калибровки (то есть матрицы калибровки), записанных в памяти 44 зонда, проводит преобразование указанных данных в точные показания давления. Таким образом, калибровка инвазивного зонда с применением примеров осуществления настоящего изобретения обеспечивает медицинскому работнику возможность точного контроля силы воздействия зонда на ткань.
Соответствующие конструкции, материалы, операции и аналоги всех средств или этапов калибровки, а также функциональные элементы, указанные в приложенной формуле изобретения, охватывают любую конструкцию, материал или операцию, предназначенные для осуществления указанной функции совместно с другими указанными элементами в соответствии с формулой изобретения. Настоящее описание изобретения представлено для иллюстративных целей и не является исчерпывающим или ограничивающим объем изобретения указанными примерами осуществления настоящего изобретения. Для специалистов в данной области техники очевидно, что в пределах объема и сущности изобретения могут быть реализованы другие варианты осуществления изобретения. Рассмотренный пример осуществления изобретения был выбран и описан с целью наиболее эффективного представления сущности изобретения и его практического применения для обеспечения понимания специалистами в данной области техники различных примеров осуществления настоящего изобретения, допустимых для конкретных указанных случаев применения изобретения.
Очевидно, что прилагаемая формула изобретения охватывает все указанные признаки и преимущества изобретения в пределах сущности и объема настоящего изобретения. Поскольку для специалистов в данной области техники очевидно, что возможны различные изменения и дополнения указанных примеров осуществления изобретения, настоящее изобретение не ограничивается конкретными примерами осуществления изобретения, описанными в данном документе. Согласно вышеизложенному, все соответствующие изменения, дополнения и аналоги примеров осуществления изобретения находятся в пределах сущности и объема настоящего изобретения.



Изобретение относится к медицине. Устройство калибровки включает исполнительный элемент и зажимное приспособление для крепления дистального конца медицинского зонда. Исполнительный элемент выполнен с возможностью прижимания к дистальному наконечнику зонда и приложения множества векторов силы. Векторы силы имеют соответствующие амплитуды и углы относительно дистального конца, с целью деформации дистального наконечника. Измерительное устройство предназначено для измерения амплитуды векторов силы, приложенной исполнительным элементом. Процессор данных калибровки осуществляет прием от зонда первых данных измерений, указывающих деформацию дистального наконечника под воздействием векторов силы, прием от измерительного устройства вторых данных измерений, указывающих амплитуду векторов силы, и расчет на основании информации об углах, а также первых и вторых данных измерений коэффициентов калибровки, обеспечивающих определение векторов силы как функции от первых данных измерений. 2 н. и 14 з.п. ф-лы, 4 ил.
1. Устройство калибровки, включающее:
зажимное приспособление, предназначенное для крепления
дистального конца медицинского зонда;
исполнительный элемент, который выполнен с возможностью прижатия к дистальному наконечнику зонда и приложения к указанному наконечнику множества векторов силы, имеющих соответствующие амплитуды и углы относительно дистального конца, с целью деформации дистального наконечника относительно дистального конца;
измерительное устройство, включающее в себя датчик давления и предназначенное для измерения амплитуды векторов силы, приложенной исполнительным элементом;
и процессор данных калибровки, предназначенный для приема от зонда первых данных измерений, указывающих деформацию дистального наконечника под воздействием векторов силы, приема от измерительного устройства вторых данных измерений, указывающих амплитуду векторов силы, и расчета на основании информации об углах, а также первых и вторых данных измерений коэффициентов калибровки, обеспечивающих определение векторов силы как функции от первых данных измерений.
2. Устройство по п. 1, включающее плоскую поверхность, связанную с исполнительным элементом и предназначенную для приложения давления к дистальному наконечнику зонда.
3. Устройство по п. 1, в котором дистальный конец зонда включает генератор магнитного поля, предназначенный для создания магнитного поля, причем дистальный наконечник включает датчик магнитного поля, осуществляющий измерение магнитного поля и подачу первых данных измерений при наличии магнитного поля.
4. Устройство по п. 1, включающее множество генераторов магнитного поля, размещенных за пределами зонда и обеспечивающих создание соответствующих магнитных полей; при этом дистальный конец и дистальный наконечник зонда включают первый и второй датчики магнитного поля, соответственно, осуществляющие измерение магнитного поля с целью подачи первых данных измерений.
5. Устройство по п. 1, включающее стойку, на которой закреплен исполнительный элемент и управление которой осуществляется процессором данных калибровки с целью приложения векторов силы с соответствующими амплитудами и углами.
6. Устройство по п. 1, в котором зажимное приспособление обеспечивает возможность поворота зонда относительно его продольной оси и в котором процессор данных калибровки выполнен с возможностью определения осевой асимметрии при деформировании дистального наконечника посредством обработки первых данных измерений, полученных при повороте зонда.
7. Устройство по п. 1, в котором процессор данных калибровки выполнен с возможностью хранения коэффициентов калибровки в памяти, подключенной к зонду.
8. Устройство по п. 7, в котором указанная память содержит электронное стираемое программируемое постоянное запоминающее устройство.
9. Способ калибровки, включающий:
крепление в зажимном приспособлении дистального конца медицинского зонда, включающего дистальный наконечник;
приложение давления исполнительного элемента к дистальному наконечнику таким образом, чтобы обеспечить приложение к дистальному наконечнику множества векторов силы, имеющих соответствующие амплитуды и углы относительно дистального конца зонда, и вызвать деформацию дистального наконечника относительно дистального конца зонда;
прием от зонда первых данных измерений, указывающих деформацию дистального наконечника под воздействием векторов силы;
прием от измерительного устройства, связанного с исполнительным элементом, вторых данных измерений, указывающих амплитуду векторов силы; и
расчет на основании информации об углах, а также первых и вторых данных измерений коэффициентов калибровки, обеспечивающих определение векторов силы как функции от первых данных измерений.
10. Способ по п. 9, в котором приложение давления исполнительного элемента включает приложение плоской поверхностью, связанной с исполнительным элементом, давления к дистальному наконечнику зонда.
11. Способ по п. 9, в котором дистальный конец зонда включает генератор магнитного поля, создающий магнитное поле, и в котором прием первых данных измерений включает прием первых данных измерений от датчика магнитного поля, размещенного в дистальном наконечнике, который осуществляет измерение магнитного поля и получение первых данных измерений при наличии магнитного поля.
12. Способ по п. 9, в котором прием первых данных измерений включает прием первых данных измерений от первого и второго датчиков магнитного поля, размещенных в дистальном конце и дистальном наконечнике зонда, соответственно, которые осуществляют измерение магнитных полей, созданных множеством генераторов магнитного поля, расположенных за пределами зонда, а также обеспечивают получение первых данных измерений.
13. Способ по п. 9, в котором приложение давления исполнительного элемента включает управление стойкой, на которой закреплен исполнительный элемент, для обеспечения приложения векторов силы, имеющих соответствующие амплитуды и углы.
14. Способ по п. 9, включающий поворот зонда в зажимном приспособлении относительно продольной оси зонда и измерение осевой асимметрии при деформации дистального наконечника посредством обработки первых данных измерений, полученных при повороте зонда.
15. Способ по п. 9, содержащий запоминание коэффициентов калибровки в памяти, подключенной к зонду.
16. Способ по п. 15, в котором память включает в себя электронное стираемое программируемое постоянное запоминающее устройство.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Устройство для контроля упругости хирургических игл | 1986 |
|
SU1393412A1 |
| US 4672974 A, 16.06.1987 | |||
| US 4384470 A, 24.05.1983 | |||
| US 4383431 A, 17.05.1983 | |||

