1
Изобретение относится к медицинской технике.
Известно устройство для принудительного изгиба конца гибкого эндоскопа, содержащее корпус, рукоятку управления с фиксатором и карданный шарнир.
Однако такое устройство отличается сложностью ориентации наблюдателя в положении плоскости изгиба устройства и направлении визирования в пространстве, а также невозможностью кругового просмотра полости.
Цель изобретения - Обеспечение непрерывного 1НослехТ,овательного кругового обзора.
Для этого предлагаемое устройство имеет скользящую обойму и муфту, а рукоятка управления выполнена с сектором и щкалой, причем рукоятка с помощью скользящей обоймы соединена с наружным кольцом карданного шарнира. Сектор рукоятки жестко скреплен с муфтой.
На чертеже изображено предлагаемое устройство.
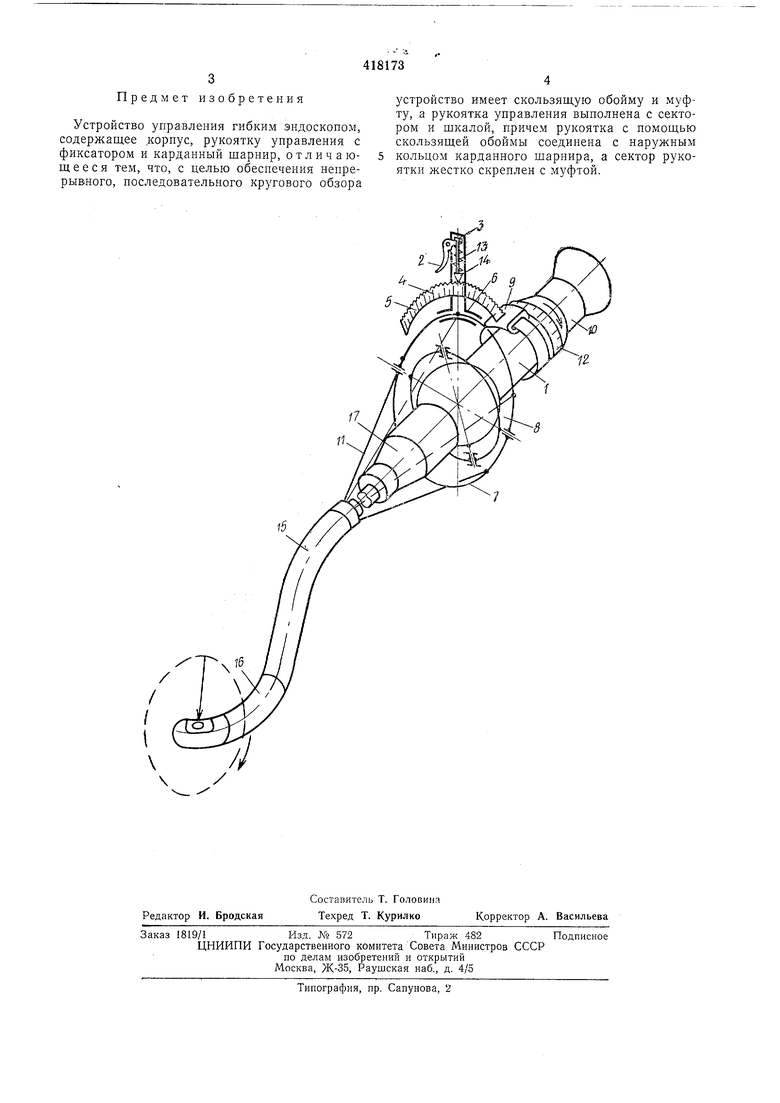
Устройство управления гибким эндоскопом содержит корпус 1, рукоятку 2 управления с фиксатором 3, сектором 4 и шкалой 5. Рукоятка с помощью скользящей обоймы 6 соединена с наружным кольцом 7 карданного шарнира 8, а сектор 4 рукоятки 2 жестко соединен с муфтой 9.
Устройство работает следующим образом.
Рукоятка управления свободно скользит относительно наружного кольца 7 карданного шарнира 8. Для обеспечения изгиба в любой точке заданной плоскости ручка управления
одновременно скользит по сектору 4, скрепленному с муфтой 9. Изгиб эндоскопа 10 осуществляется посредством тяг 11, соединенных с наружным кольцом карданного шарнира. Рукоятка лежит точно в плоскости изгиба, а
шкала на секторе указывает на угол изгиба эндоскопа. Шкала 12 дает положение плоскости наблюдения относительно плоскости изгиба. На рукоятке 2 установлен фиксатор 3 с пружиной 13, сцепляющей в случае необходимости рукоятку 14 с сектором при любом ее положении.
Оператор, наблюдая в окуляр, вводит гибкую часть 15 эндоскопа 10 в исследуемую полость. Отжимая рукояткой 2 пружину 13, выводит фиксатор из зацепления с сектором и устанавливает рукоятку 14 относительно сектора в требуемое положение, этим задавая через тяги определенный наклон управляемой гибкой части с дистальной головкой 16. Затем, удерживая рукоятку 14 в одной руке в неизменном положении, другой рукой поворачивает корпус проксимальной части 17 относительно оптической оси, что обеспечивает панорамирование при неизменном положении
дистальной головки эндоскопа в пространстве.
Предмет изобретения
Устройство управления гибким эндоскопом, содержащее корпус, рукоятку управления с фиксатором и карданный шарнир, отличающееся тем, что, с пелью обеспечения непрерывного, последовательного кругового обзора
устройство имеет скользящую обойму и муфту, а рукоятка управления выполнена с сектором и шкалой, причем рукоятка с помощью скользящей обоймы соединена с наружным кольцом карданного шарнира, а сектор рукоятки жестко скреплен с муфтой.
.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| Кантователь деталей | 1989 |
|
SU1673375A2 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Устройство управления гибким эндоскопом | 1976 |
|
SU564856A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ АВИАЦИОННОГООСТЕКЛЕНЕНИЯ | 1971 |
|
SU453600A1 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| СУДОВАЯ ТРАНСМИССИЯ (ВАРИАНТЫ) | 2006 |
|
RU2313471C2 |
| Устройство для определения степени подвижности тазового дна | 1985 |
|
SU1301380A2 |
| ИГРУШКА-КАТАЛКА | 2004 |
|
RU2255787C1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |