Изобретение относится к вооружению подводных лодок, а именно к защите подводных лодок от торпед или мин, преимущественно от широкополосных мин-торпед.
Известен способ защиты подводной лодки от широкополосной мины-торпеды, содержащий обнаружение мины-торпеды, ее классификацию и уклонение от мины-торпеды путем изменения курса или производство реверса [Хвощ В.А. Тактика подводных лодок. - М.: Военное издательство. - 1989, с.152].
Обнаружение мины-торпеды и ее классификация используются и в заявляемом способе.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является низкая эффективность защиты подводной лодки, так как последняя, совершая маневр уклонения, в силу инерции попадает в зону поражения миной-торпедой, радиус поражения которой составляет 1000 метров. Войдя в эту зону, подводная лодка вызовет срабатывание мины, вследствие чего из стартового контейнера мины-торпеды выйдет торпеда, которая выполнит операцию наведения на уклоняющуюся подводную лодку и поразит ее [Кондратович А.А., Пиянзов Г.Г. Противоминное оружие. - М.: Военное издательство. - 1989, с.51 - 53; Янковский В. Минная война на море. - Зарубежное военное обозрение. - 1980. - №2. - с.72].
Известен также способ защиты надводных кораблей от торпед, содержащий обнаружение торпеды, ее классификацию, выработку данных стрельбы и производство выстрела для поражения цели глубинными бомбами из реактивной бомбовой установки РБУ-1 000 [Широкорад А.Б. Оружие отечественного флота 1945. - 2000. - М.: Изд-во Харвет. А.С.Т. 1945 - 2001. - С.570 - 576].
Обнаружение торпеды, ее классификация и выработка данных стрельбы используются и в заявляемом способе.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является относительно низкая эффективность его для защиты подводной лодки, потому что применяемые в этом способе реактивные снаряды имеют дальность хода под водой, недостаточную для покрытия ошибок в определении местонахождения торпеды.
Наиболее близким по технической сущности к заявляемому (прототипом) является способ защиты подводной лодки от широкополосной мины-торпеды, защищенный патентом РФ №2283793, кл. B63G 9/02, 2005. Он содержит обнаружение и определение угловых координат в режиме шумопеленгования торпеды, вышедшей из стартового контейнера и наводящейся на подводную лодку, ее классификацию, выработку данных стрельбы, производство выстрела устройства, несущего реактивные снаряды, с приходом устройства в расчетную точку на пути его движения пуск реактивных снарядов, эпицентры взрывов которых, равномерно, исключая образование непораженных участков, распределяются в объеме ограниченного водного пространства, сформированного вокруг предварительно рассчитанной точки встречи устройства и торпеды, путем постановки завес из силового поля взрывов реактивных снарядов на пути движения торпеды в телесном угле, обращенном вершиной к подводной лодке и ограниченном усеченной конической поверхностью с осью симметрии, совпадающей с направлением на источник шума, при этом середина оси симметрии совпадает с расчетной точкой встречи устройства с торпедой.
Все признаки способа-прототипа являются и признаками заявляемого способа.
Причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является сложность реализации способа, обусловленная тем, что ограниченное усеченной конической поверхностью водное пространство, в пределах которого осуществляют постановку завес из реактивных снарядов, имеет достаточно большие размеры, что требует большого количества реактивных снарядов, а также значительных габаритов устройства, несущего эти заряды.
Еще одной причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является относительно низкая вероятность поражения торпеды. Дело в том, что при определении области ограниченного водного пространства, в пределах которого осуществляется постановка завес из реактивных снарядов, оценка координат точки встречи устройства, несущего реактивные снаряды, с торпедой производится без учета того, что начальная скорость этого устройства (скорость при выстреле) может значительно отличаться от скорости хода. Поэтому фактическая точка встречи этого устройства с торпедой может значительно отличаться от расчетной, в результате чего торпеда окажется вне зоны поражения.
Технической задачей, на решение которой направлено изобретение, является упрощение реализации способа и повышение эффективности защиты подводной лодки.
Для достижения указанного технического результата в известном способе защиты подводной лодки от широкополосной мины-торпеды, содержащем обнаружение и определение угловых координат в режиме шумопеленгования торпеды, вышедшей из стартового контейнера и наводящейся на подводную лодку, ее классификацию, выработку данных стрельбы, производство выстрела устройства, несущего реактивные снаряды, с приходом устройства в расчетную точку на пути его движения пуск реактивных снарядов, эпицентры взрывов которых, равномерно, исключая образование непораженных участков, распределяются в объеме ограниченного водного пространства, сформированного вокруг предварительно рассчитанной точки встречи устройства и торпеды, путем постановки завес из силового поля взрывов реактивных снарядов на пути движения торпеды в телесном угле, обращенном вершиной к подводной лодке и ограниченном усеченной конической поверхностью с осью симметрии, совпадающей с направлением на источник шума, при этом середина оси симметрии совпадает с расчетной точкой встречи устройства с торпедой, определяют дистанцию от подводной лодки до торпеды методом активной гидролокации, при этом излучают зондирующий сигнал и принимают отраженный от торпеды (гидролокационный) сигнал с помощью узконаправленной антенны, акустическую ось которой устанавливают в направлении на торпеду, предварительно определенном методом шумопеленгования, а дистанцию DB от места выстреливания устройства-носителя реактивных снарядов до расчетной точки встречи с торпедой определяют по формулам:

где VУ0 - начальная скорость устройства-носителя реактивных снарядов;
VУ - скорость хода устройства-носителя реактивных снарядов;

τ - время движения устройства-носителя реактивных снарядов на участке от места выстреливания до точки, в которой его скорость снижается до уровня VУ;
DП - дистанция от подводной лодки до торпеды в момент ее обнаружения и определения дальности методом активной гидролокации;
tЗ - время задержки от момента определения дальности торпеды на дистанции DП до выстреливания устройства-носителя реактивных снарядов;
VТ - скорость хода торпеды.
Отсутствуют какие-либо источники информации, в которых вновь введенные действия были описаны самостоятельно или в совокупности с остальными элементами заявляемого способа. Поэтому предлагаемый способ следует считать новым и имеющим изобретательский уровень.
Изобретение поясняется чертежом, на котором приведена схема защиты подводной лодки от торпеды.
Сущность предлагаемого способа защиты подводной лодки от мины-торпеды заключается в следующем.
На подводной лодке в режиме шумопеленгования по шумам, издаваемым винтами торпеды после выхода последней из стартового контейнера и начала наведения на подводную лодку, осуществляют оценку угловых координат торпеды - курсового угла и вертикального угла прихода шума. После определения этих углов на подводной лодке включают режим активной гидролокации. В этом режиме определяют только дистанцию DП от подводной лодки до торпеды. При этом для излучения зондирующего сигнала и для приема гидролокационного (отраженного от торпеды) сигнала используют одну и ту же узконаправленную антенну, акустическую ось которой устанавливают в направлении на торпеду, предварительно определенном в режиме шумопеленгования. Режим активной гидролокации можно использовать кратковременно, лишь на время определения дистанции DП. Кратковременное использование этого режима и узкая характеристика направленности антенны обеспечивают низкую вероятность обнаружения подводной лодки по излучению зондирующего сигнала.
После определения дальности DП с помощью бортовой информационной управляющей системы (БИУС) подводной лодки осуществляют расчет данных для стрельбы. Они содержат размеры и форму ограниченного водного пространства, в котором должна осуществляться постановка завес реактивных снарядов, количество этих снарядов, углы и моменты их пуска и т.д. Необходимые для расчета константы (например, скорости хода торпеды и устройства-носителя реактивных снарядов) содержатся в памяти БИУС.
На Фиг. показано взаимное расположение подводной лодки, торпеды, устройства-носителя реактивных снарядов, а также область ограниченного водного пространства, в пределах которого осуществляют постановку завес реактивных снарядов. Это пространство ограничено усеченной конической поверхностью и площадями завес - ближайшей к подводной лодке и наиболее удаленной от нее.
На Фиг. приняты следующие обозначения:
ПЛ - подводная лодка;
У - устройство-носитель реактивных снарядов;
Т - торпеда;
FI - площадь завесы, ближайшей к подводной лодке;
FСР - площадь завесы, поставленной в расчетной точке встречи устройства-носителя реактивных снарядов с торпедой;
FII - площадь завесы, наиболее удаленной от подводной лодки;
DР - дистанция от места выстреливания устройства-носителя реактивных снарядов (от подводной лодки) до расчетной точки начала постановки завес;
DB - дистанция от места выстреливания устройства-носителя реактивных снарядов до расчетной точки его встречи с торпедой;
SП - участок пути движения устройства-носителя реактивных снарядов с постановкой завес.
Расчет осуществляется в следующей последовательности.
1. Рассчитывают дистанцию DB по формулам:


где VУ0 - начальная скорость устройства-носителя реактивных снарядов;
VУ - скорость хода устройства-носителя реактивных снарядов;
τ - время движения устройства-носителя реактивных снарядов на участке от места выстреливания до точки, в которой его скорость снижается до уровня VУ;
DП - дистанция от подводной лодки до торпеды в момент ее обнаружения и определения дальности методом активной гидролокации;
tЗ - время задержки от момента определения дальности торпеды на дистанции DП до выстреливания устройства-носителя реактивных снарядов;
VТ - скорость хода торпеды.
2. Рассчитывают длину участка пути SП по формуле:

где σD - средняя квадратичная ошибка в определении дальности DП методом активной гидролокации.
3. Рассчитывают дистанцию DP от подводной лодки до расчетной точки начала постановки завес реактивных снарядов по формуле:

4. Рассчитывают площадь Fcp завесы в середине участка пути SП по формуле:

где В - высота проекции корпуса подводной лодки на вертикальную плоскость, перпендикулярную линии пути движения устройства-носителя реактивных снарядов;
Ш - ширина проекции корпуса подводной лодки на вертикальную плоскость, перпендикулярную линии пути движения устройства-носителя реактивных снарядов;
αУП - средняя квадратичная ошибка определения угла визирования торпеды с подводной лодки в вертикальной плоскости;
αКУ - средняя квадратичная ошибка определения курсового угла торпеды (угла визирования торпеды с подводной лодки) в горизонтальной
плоскости.
5. Рассчитывают необходимое число N снарядов в завесе площадью FCP в середине участка пути SП по формуле:

где ΔV - объем водного пространства, в котором обеспечивается поражение торпеды при взрыве одного реактивного снаряда в случае попадания торпеды в этот объем.
6. Рассчитывают промежуток ΔS участка SП пути, через который следует производить постановку завес реактивных снарядов, по формуле:

где R - радиус поражения торпеды зарядом реактивного снаряда.
Аналогично пунктам 4 и 5 рассчитывают площадь завесы и необходимое в ней число реактивных снарядов для каждой из завес, планируемых к постановке на пути SП с интервалом ΔS.
Углы и моменты пуска реактивных снарядов определяются БИУС по специальной программе, обеспечивающей установление завес реактивных снарядов перпендикулярно линии движения устройства-носителя реактивных снарядов с интервалом ΔS, и таким образом, что эпицентры взрывов реактивных снарядов в каждой из завес распределены равномерно.
Устройство-носитель реактивных снарядов находится в торпедном аппарате подводной лодки полностью снаряженное и готовое к выстрелу.
По команде БИУС устройство выстреливается и направляется к торпеде, то есть к точке, определяемой ее дальностью и угловыми координатами в момент выстрела. С приходом устройства в расчетную точку начала участка SП оно осуществляет постановку завес реактивных снарядов перпендикулярно линии движения с интервалом ΔS между завесами и последующий взрыв этих снарядов.
Описанные действия обеспечивают достаточно высокую вероятность попадания торпеды в область водного пространства с установленными в нем завесами реактивных снарядов и поражение торпеды.
Предлагаемый способ достаточно легко реализуем. В качестве устройства-носителя реактивных снарядов может служить устройство, конструкция которого аналогична устройству, защищенному патентом РФ №2283793, то есть устройству, реализующему способ-прототип.
Из уравнений (1)÷(6) видно, что количество N реактивных снарядов, входящих в состав каждой из завес, в значительной степени определяется средней квадратичной ошибкой определения дальности DП (ошибкой σD). В заявляемом способе эта ошибка значительно меньше, чем в способе-прототипе. В формуле изобретения способа-прототипа определение дистанции DП торпеды не предусмотрено, так как там для определения ее координат используется только шумопеленгование, а оно само по себе не позволяет определить дальность до цели. В описании способа-прототипа предложено эту дальность определять триангуляционным методом. В принципе это возможно, но весьма проблематично, так как для этого нужно определить, как минимум, два разных пеленга на одну и ту же неподвижную или малоподвижную (в данном случае торпеду) цель из разных точек с известными координатами. В любом случае ошибка определения дальности этим методом будет значительно больше, чем ошибка σD определения дальности в заявляемом способе, где для этой цели применяется метод активной гидролокации. Это позволяет сделать вывод, что количество N реактивных снарядов, необходимое для обеспечения той же вероятности поражения торпеды в заявляемом способе, будет значительно меньше, чем в способе-прототипе. Это упрощает реализацию носителя этих зарядов и реализацию способа в целом.
В способе-прототипе расчет дистанции DB осуществляется без учета того, что начальная скорость VУ0 может значительно превышать скорость VУ хода. При этом расчет ведут по формуле:
Это обстоятельство приводит к существенной ошибке в определении дистанции DB от места выстреливания устройства-носителя реактивных снарядов до расчетной точки его встречи с торпедой (до центра области водного пространства, предназначенного для постановки завес реактивных снарядов), что в свою очередь снижает вероятность попадания торпеды в зону поражения.
Примем для определенности: DП = 1000 м; VТ = VУ = 10 м/с; tЗ = 0; VУ0 = 50 м/с; 
В этих условиях для способа-прототипа получим:

Фактическая же дистанция DB в соответствии с уравнениями (1) и (2) определится:

Нетрудно видеть, что в способе-прототипе дистанция DB определяется с ошибкой порядка 60 м (она составляет 500 м вместо фактической 560 м). Это существенно снижает вероятность попадания торпеды в зону поражения.
В заявляемом способе за счет учета высокой начальной скорости и замедления устройства-носителя реактивных снарядов на начальном (стартовом) участке траектории эта ошибка отсутствует. Это обеспечивает попадание расчетной точки встречи этого устройства с торпедой в центр зоны поражения, что существенно повышает вероятность попадания торпеды в эту зону и в конечном итоге повышает эффективность защиты подводной лодки от торпеды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ | 2012 |
|
RU2513880C2 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ | 2011 |
|
RU2474512C2 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ТОРПЕДЫ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2283793C1 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2214942C2 |
| Противоторпедное устройство подводной лодки | 2020 |
|
RU2754162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| Корабль освещения подводной обстановки | 2022 |
|
RU2803404C1 |
Использование: изобретение относится к вооружению подводных лодок, а именно к защите подводных лодок от торпед или мин, преимущественно от широкополосных мин-торпед. Сущность: способ защиты подводной лодки от широкополосной мины-торпеды содержит обнаружение и определение угловых координат в режиме шумопеленгования торпеды, вышедшей из стартового контейнера и наводящейся на подводную лодку, ее классификацию, выработку данных стрельбы, производство выстрела устройства, несущего реактивные снаряды, с приходом устройства в расчетную точку на пути его движения пуск реактивных снарядов, эпицентры взрывов которых, равномерно, исключая образование непораженных участков, распределяются в объеме ограниченного водного пространства, сформированного вокруг предварительно рассчитанной точки встречи устройства и торпеды, путем постановки завес из силового поля взрывов реактивных снарядов на пути движения торпеды в телесном угле, обращенном вершиной к подводной лодке и ограниченном усеченной конической поверхностью с осью симметрии, совпадающей с направлением на источник шума, при этом середина оси симметрии совпадает с расчетной точкой встречи устройства с торпедой. Определяется дистанция от подводной лодки до торпеды методом активной гидролокации, при этом излучение зондирующего сигнала и прием отраженного от торпеды (гидролокационного) сигнала осуществляется с помощью узконаправленных антенн, акустические оси которых устанавливаются в направлении на торпеду, предварительно определенном методом шумопеленгования. Технический результат: упрощение реализации способа и повышение эффективности защиты подводной лодки.1 ил.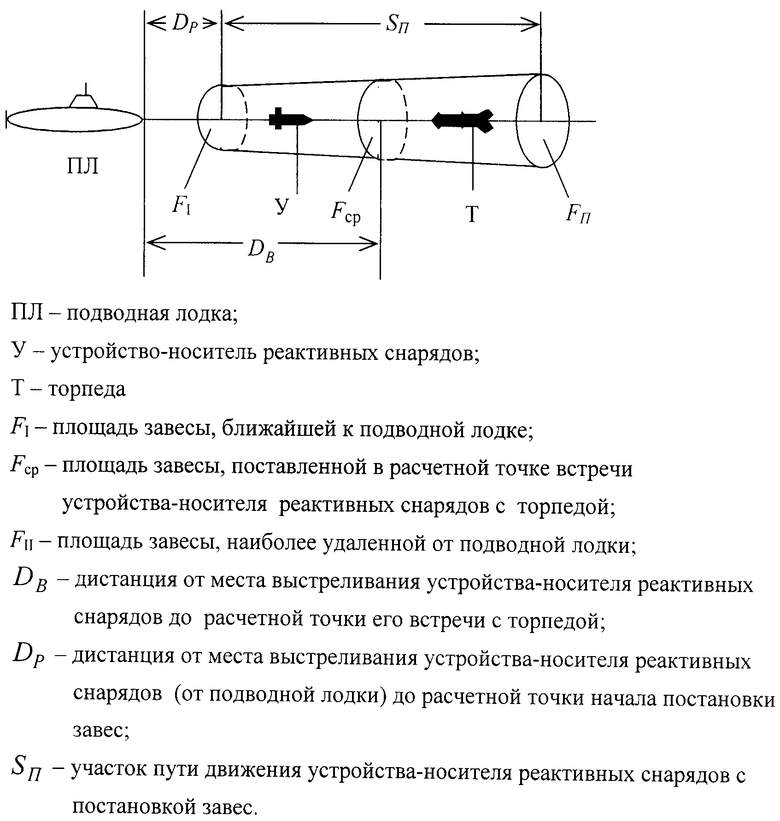
Способ защиты подводной лодки от широкополосной мины-торпеды, содержащий обнаружение и определение угловых координат в режиме шумопеленгования торпеды, вышедшей из стартового контейнера и наводящейся на подводную лодку, ее классификацию, выработку данных стрельбы, производство выстрела устройства, несущего реактивные снаряды, с приходом устройства в расчетную точку на пути его движения пуск реактивных снарядов, эпицентры взрывов которых, равномерно, исключая образование непораженных участков, распределяются в объеме ограниченного водного пространства, сформированного вокруг предварительно рассчитанной точки встречи устройства и торпеды, путем постановки завес из силового поля взрывов реактивных снарядов на пути движения торпеды в телесном угле, обращенном вершиной к подводной лодке и ограниченном усеченной конической поверхностью с осью симметрии, совпадающей с направлением на источник шума, при этом середина оси симметрии совпадает с расчетной точкой встречи устройства с торпедой, отличающийся тем, что
определяют дистанцию от подводной лодки до торпеды методом активной гидролокации, при этом излучают зондирующий сигнал и принимают отраженный от торпеды (гидролокационный) сигнал с помощью узконаправленной антенны, акустическую ось которой устанавливают в направлении на торпеду, предварительно определенном методом шумопеленгования, а дистанцию DB от места выстреливания устройства-носителя реактивных снарядов до расчетной точки встречи с торпедой определяют по формулам:
 ;
;
 ,
,
где VУ0 - начальная скорость устройства-носителя реактивных снарядов;
VУ - скорость хода устройства-носителя реактивных снарядов;
 - замедление устройства-носителя реактивных снарядов после выстреливания;
- замедление устройства-носителя реактивных снарядов после выстреливания;
τ - время движения устройства-носителя реактивных снарядов на участке от места выстреливания до точки, в которой его скорость снижается до уровня VУ;
DП - дистанция от подводной лодки до торпеды в момент ее обнаружения и определения дальности методом активной гидролокации;
tЗ - время задержки от момента определения дальности торпеды на дистанции DП до выстреливания устройства-носителя реактивных снарядов;
VT - скорость хода торпеды.

