Изобретение относится к области судостроения, преимущественно к противолодочным кораблям, назначением которых является поиск и обнаружение подводных объектов и слежение за ними, то есть освещение подводной обстановки.
Подводные лодки являются грозным оружием и предложено много способов их обнаружения, но по сей день, ни один из них по эффективности не может обеспечить точной информацией, требующейся для окончательной идентификации подводных объектов и принятия полных решений.
Противолодочные корабли имеют на борту гидроакустические станции (ГАС), которые работают как гидролокаторы, улавливают звук шумовых сигналов (пассивный режим) или излучают свои звуковые сигналы, чтобы обнаружить отраженный от препятствий эхо-сигнал (активный режим).
Известен гидроакустический комплекс для надводных кораблей МГК-335ЭМ-05 (http://www.oceanpribor.ru/docs/mgk-335-em-05.pdf), обеспечивающий дальность обнаружения подводных лодок на дистанциях 12-15 км, причем с опускным антенным модулем до 10-15 км.
Недостатком известного корабельного комплекса являются недостаточные дальности шумопеленгования на ходу корабля, всего до 2 км, соизмеримые с эффективными дальностями использования торпед необнаруженных подводных лодок, что не отвечает современным требованиям обеспечения живучести в непредвиденных ситуациях.
Известны способы, увеличивающие зоны поиска подводных лодок пилотируемыми самолетами и вертолетами противолодочной авиации, путем сбрасывания в воду гидроакустических буев, автономных гидроакустических станций (АГАС), которые обнаруживают подводные объекты и передают информацию об их положении на использующие их носители, а затем на противолодочный корабль, причем в новейших версиях применяют палубные беспилотники на базе вертолетов (https://nplus1.ru/news/2021/02/05/submarine).
Недостатками использования АГАС с помощью авиационных носителей являются надобность дежурства носителей в воздухе или их вызов с задержкой применения АГАС в необходимых временных рамках, причем дополнительно требуется взаимодействие по связи авиационного носителя кроме как с АГАС, так и с противолодочным кораблем.
Для увеличения радиуса обнаружения подводных лодок с помощью АГАС без использования авиационных носителей известен реактивный радиогидроакустический буй (патент RU 2400392 от 27.09.2010 г.), оснащенный ракетным двигателем, стабилизатором, механизмом отделения, устройством ввода данных, поплавком, газогенератором, приборами управления стрельбой со счетно-решающим устройством и корабельной пусковой установкой, предназначенной для стрельбы реактивными глубинными бомбами.
Недостатком известного реактивного радиогидроакустического буя является ограниченная дальность установки, соответствующая предельной дальности стрельбы корабельной пусковой установкой, предназначенной для стрельбы реактивными глубинными бомбами и недостаточная точность установки в заданные точки, связанная с механизмом отделения ракетной части и спуском на парашюте.
Наиболее близким по технической сущности к заявленному техническому решению, прототипом, является корабль освещения подводной обстановки (патент RU 2693767 от 04.07.2019 г.), оснащенный гидроакустическим излучателем с гидроакустической антенной, опускаемой под воду на заданную глубину и комплектом пассивных автономных гидроакустических станций (АГАС), способных обнаруживать зондирующие сигналы гидроакустического излучателя, отраженные от подводных объектов, средствами измерения характеристик гидроакустических условий в районе плавания и аппаратурой связи для приема сообщений от АГАС, ЭВМ со специальной программой, позволяющей до начала работы рассчитывать необходимое количество, координаты устанавливаемых АГАС, траекторию маневрирования корабля, оптимальные для текущих гидроакустических условий глубины установки антенны излучателя и АГАС, а в процессе работы вычислять траектории обнаруженных подводных объектов и определять их координаты и параметры движения.
Основными недостатками известного корабля освещения подводной обстановки являются обязательное его маневрирование по сложной траектории через все рассчитанные позиции АГАС при их постановке, занимающее длительное время до приведения в работу, функционирование системы освещения подводной обстановки при нахождении его только в дрейфе и невозможность использования протяженных буксируемых антенн, обладающих повышенными характеристиками.
На устранение указанных недостатков направлено новое техническое решение, технической задачей которого является упрощение траектории маневрирования при постановке АГАС, функционирование системы освещения подводной обстановки при любых маневрах, увеличении контролируемой площади подводного наблюдения и возможность использования протяженных буксируемых антенн.
Указанный технический результат достигается тем, что у корабля освещения подводной обстановки, опускаемая гидроакустическая антенна выполнена в виде гидроакустической протяженной буксируемой приемопередающей антенны, АГАС дополнительно способны обнаруживать шумовые сигналы от подводных объектов и включают приемное устройство навигации ГЛОНАС/GPS и аппаратуру передачи сообщений об обнаружении подводного объекта и координатах своего местонахождения. Принципиальным отличием является то, что конструкция АГАС объединена с адаптированным мультикоптером.
Адаптированный мультикоптер в объединенной конструкции может быть подключен по электропитанию к батарее АГАС.
Дополнительно, для увеличения дальности радиосвязи приема сообщений от АГАС, может использоваться мультикоптер-ретранслятор.
Комплект АГАС, объединенных с адаптированными мультикоптерами, может быть размещен в контейнере запуска, в транспортном положении, причем при запуске АГАС частично выдвигают для приведения адаптированного мультикоптера в предполетное состояние.
Общеизвестно, что пассивные гидроакустические станции определяют направление на источник звука (шумопеленгование) в водной среде, активный гидроакустический способ позволяет определять, как пеленг, так и дистанцию до цели и в тоже время активная гидроакустическая станция может «подсветить» отражающую подводную лодку для пассивных гидроакустических станций, как в прототипе. Автономные гидроакустические буи и развернутая антенная решетка в виде гидроакустической буксируемой приемо-передающей антенны обнаруживают подводную лодку в мультистатическом режиме.
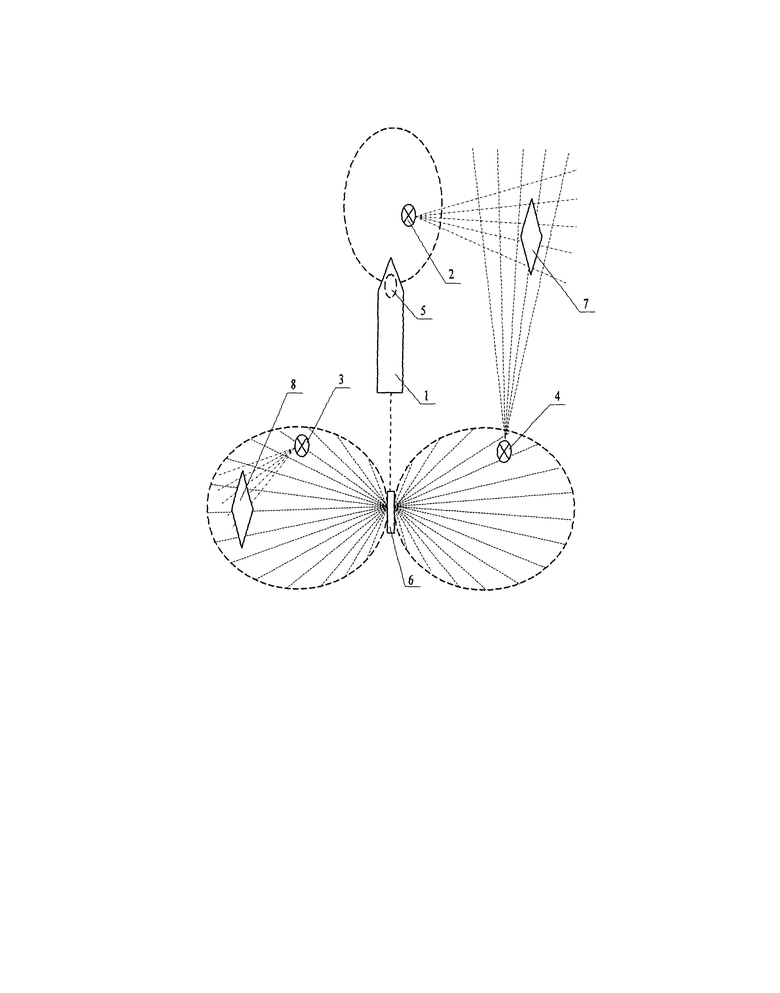
Сущность изобретения поясняется фиг. 1, где:
1 - корабль освещения подводной обстановки;
2, 3 и 4 - адаптированными мультикоптерами, АГАС;
5 - бортовая гидроакустическая станция;
6 - опускаемая гидроакустическая протяженная буксируемая приемопередающая антенна;
7 - подводный объект.
На фиг.1 схематически показан корабль освещения подводной обстановки 1, в одиночном плавании, в режиме освещения подводной обстановки с выставленными, с адаптированными мультикоптерами, АГАС 2, 3 и 4. Для освещения подводной обстановки в штатном режиме используются бортовая гидроакустическая станция 5 и ГАС с опускаемой гидроакустической антенной, выполненной в виде гидроакустической протяженной буксируемой приемо-передающей антенны 6. Подводный объект 7, находящийся в зоне недосягаемости корабельных ГАС, обнаруживается одновременно АГАС 2 и 4 в режиме шумопеленгования, а подводный объект 8, обнаруживается одновременно корабельной ГАС с развернутой антенной решеткой 6 и АГАС 3 в режиме пеленгования отраженного сигнала.
Версия реализации изобретения осуществляется следующим образом. Следуя необходимым курсом в район акватории с прогнозируемым нахождением опасных подводных объектов корабль освещения подводной обстановки 1, использует бортовую гидроакустическую станцию 5 и ГАС с опускаемой приемо-передающей антенной 6 в штатном режиме. При приближении к заданной точке, в зоны недосягаемости бортовой гидроакустической станции обследуемого района, с учетом оперативной обстановки, по результатам предварительных расчетов выставляются АГАС 2, 3 и 4, объединенные с адаптированными мультикоптерами, которые перемещаются посредством несущих винтов, адаптировано объединенных мультикоптеров с использованием устройства навигации ГЛОНАС/GPS. Корабль при постановке АГАС 2, 3 и 4 следует своим курсом. Бортовая гидроакустическая станция 5 переводится в режим шумопеленгования и в случае нахождения подводного объекта 7, находящегося в зоне недосягаемости корабельных ГАС, в режиме шумопеленгования он обнаруживается одновременно АГАС 2 и 4. Кроме этого, подводный объект 8, также находящийся в зоне недосягаемости бортовой гидроакустической станции 5 обнаруживается одновременно корабельной ГАС с развернутой антенной решеткой 6 на ее предельной дистанции и уточняется АГАС 3 в режиме пеленгования по отраженному сигналу от работающей в активном режиме ГАС с опускаемой гидроакустической антенной 6.
В отличие от прототипа, предлагаемому кораблю освещения подводной обстановки не требуется маневрирование по сложной траектории через все рассчитанные позиции АГАС при их постановке, так как в расчетные точки АГАС, объединенные с адаптированными мультикоптерами, перемещаются посредством несущих винтов адаптировано объединенных мультикоптеров с использованием устройства навигации ГЛОНАС/GPS. Таким образом, корабль при постановке АГАС следует своим курсом.
Для увеличения полезной нагрузки на адаптированные мультикоптеры и упрощения конструкции, электродвигатели несущих винтов и их электронные схемы управления могут быть подключены к батарее питания АГАС.
Опускаемая гидроакустическая антенна, выполненная в виде гидроакустической протяженной буксируемой приемо-передающей антенны, при движении корабля, развернутая за кормой и работающая в активном режиме, при диаграмме направленности, преимущественно ориентированной перпендикулярно к курсу корабля, «подсвечивает» объекты для АГАС, позиции которых находятся со сторон бортов, расширяя зону освещения подводной обстановки.
АГАС на позициях, выдвинутых по курсу вперед, в режиме шумопеленгования обеспечивают увеличение зоны освещенности по ходу движения корабля, а при работе стационарных корабельных гидроакустических станций реализуют и работу в режиме с «подсветкой» объектов. При этом специальная программа ЭВМ обеспечивает динамику изменений при движении корабля относительно находящихся в дрейфе выставленных АГАС, передающих свои координаты и результаты обнаружения подводных объектов.
В зависимости от условий района плавания и оперативной обстановки, скорости движения корабля и подводных объектов, программно может оптимизироваться количество, углы и дальности выставления АГАС от корабля в зоне обзора, а также выставления по курсу движения.
В свою очередь, индивидуальная постановка АГАС и возможность оперативного учета изменяющихся условий, могут обеспечить оптимизированное количество используемых АГАС в пределах от одного до полного комплекта. Дополнительно к этому, в случаях перспективного планирования операций освещения подводной обстановки, АГАС могут быть использованы как для одного корабля, так и для совместного использования в ордере, как путем получения для обработки первичной информации с АГАС, так и обменом между кораблями обработанными данными. Кроме этого, в целях организации оперативных заслонов или создания «ячеистых сетей» могут быть заранее рассчитаны варианты применения АГАС.
В зависимости от состояния водной поверхности и надежности радиоконтактов АГАС с кораблем, а также при расширении зоны освещения подводной обстановки для увеличения дальности радиосвязи приема сообщений от АГАС, может использоваться мультикоптер-ретранслятор, при подъеме с корабля которого увеличивается дальность электромагнитной доступности в радиосети связи с АГАС.
С учетом назначения корабля возможна разная комплектация ГАС. При этом комплект АГАС, объединенных с адаптированными мультикоптерами, может быть размещен в контейнере запуска, в транспортном положении, причем при запуске АГАС частично выдвигают для приведения адаптированного мультикоптера в предполетное состояние. В свою очередь, для оснащения малых кораблей с небольшим количеством АГАС в комплекте они могут находиться в транспортных футлярах.
Таким образом, на основании приведенных доводов, можно считать, что заявленный технический результат, заключающийся в упрощении траектории маневрирования при постановке АГАС, функционировании системы освещения подводной обстановки при любых маневрах и возможности использования протяженных буксируемых антенн и увеличении контролируемой площади подводного наблюдения с помощью предложения конструкции АГАС, объединенной с адаптированным мультикоптером, достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| Дифференциальный способ поиска и обнаружения подводных лодок | 2022 |
|
RU2797407C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| Интегрированная система боевого управления нижней полусферы надводного корабля | 2022 |
|
RU2793372C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
| СПОСОБ ИМИТАЦИИ ПОДВОДНЫХ ЛОДОК ПРИ ПРОВЕДЕНИИ УЧЕНИЙ | 2021 |
|
RU2761937C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2019 |
|
RU2730749C1 |
Использование: изобретение относится к области судостроения, преимущественно к противолодочным кораблям, назначением которых является поиск и обнаружение подводных объектов и слежение за ними, то есть освещение подводной обстановки. Сущность: корабль освещения подводной обстановки оснащен гидроакустическим излучателем с гидроакустической антенной, опускаемой под воду на заданную глубину и комплектом пассивных автономных гидроакустических станций (АГАС), способных обнаруживать зондирующие сигналы гидроакустического излучателя, отраженные от подводных объектов, средствами измерения характеристик гидроакустических условий в районе плавания и аппаратурой связи для приема сообщений от АГАС, ЭВМ со специальной программой, позволяющей до начала работы рассчитывать необходимое количество, координаты устанавливаемых АГАС, траекторию маневрирования корабля, оптимальные для текущих гидроакустических условий глубины установки антенны излучателя и АГАС, а в процессе работы вычислять траектории обнаруженных подводных объектов и определять их координаты и параметры движения, опускаемая гидроакустическая антенна выполнена в виде гидроакустической протяженной буксируемой приемо-передающей антенны, АГАС дополнительно способны обнаруживать шумовые сигналы от подводных объектов и включают приемное устройство навигации ГЛОНАС/GPS, аппаратуру передачи сообщений об обнаружении подводного объекта и координатах своего местонахождения, причем конструкция АГАС объединена с адаптированным мультикоптером. Технический результат: упрощение траектории маневрирования при постановке АГАС, функционирование системы освещения подводной обстановки при любых маневрах, увеличение контролируемой площади подводного наблюдения и возможность использования протяженных буксируемых антенн. 3 з.п. ф-лы, 1 ил.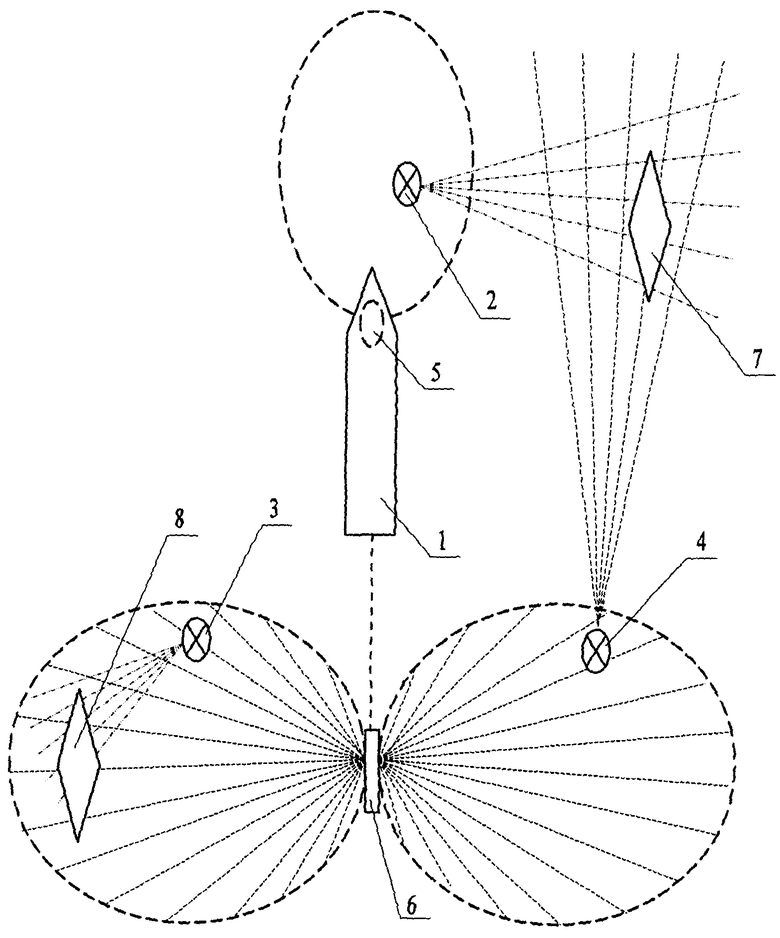
1. Корабль освещения подводной обстановки, оснащенный гидроакустическим излучателем с гидроакустической антенной, опускаемой под воду на заданную глубину и комплектом пассивных автономных гидроакустических станций (АГАС), способных обнаруживать зондирующие сигналы гидроакустического излучателя, отраженные от подводных объектов, средствами измерения характеристик гидроакустических условий в районе плавания и аппаратурой связи для приема сообщений от АГАС, ЭВМ с программой, позволяющей до начала работы рассчитывать необходимое количество, координаты устанавливаемых АГАС, траекторию маневрирования корабля, оптимальные для текущих гидроакустических условий глубины установки антенны излучателя и АГАС, а в процессе работы вычислять траектории обнаруженных подводных объектов и определять их координаты и параметры движения, отличающийся тем, что опускаемая гидроакустическая антенна выполнена в виде гидроакустической протяженной буксируемой приемо-передающей антенны, АГАС дополнительно способны обнаруживать шумовые сигналы от подводных объектов и включают приемное устройство навигации ГЛОНАС/GPS, аппаратуру передачи сообщений об обнаружении подводного объекта и координатах своего местонахождения, причем конструкция АГАС объединена с адаптированным мультикоптером.
2. Корабль освещения подводной обстановки по п. 1, отличающийся тем, что адаптированный мультикоптер в объединенной конструкции подключен по электропитанию к батарее АГАС.
3. Корабль освещения подводной обстановки по п. 1, отличающийся тем, что для увеличения дальности радиосвязи приема сообщений от АГАС используется мультикоптер-ретранслятор.
4. Корабль освещения подводной обстановки по п. 1, отличающийся тем, что комплект АГАС, объединенных с адаптированными мультикоптерами, размещают в контейнере запуска, в транспортном положении, причем при запуске АГАС частично выдвигают для приведения адаптированного мультикоптера в предполетное состояние.
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| Реверсивная асинхронная муфта скольжения | 1951 |
|
SU96262A1 |
| US 9321529 B1, 26.04.2016 | |||
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| US 20180107210 A1, 19.04.2018 | |||
| US 20160376000 A1, 29.12.2016 | |||
| WO 2021041629 A1, 04.03.2021 | |||
| US 10701913 B2, 07.07.2020 | |||
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
