Изобретение относится к гидроакустике и может быть использовано на судах, не имеющих в своем составе многофункциональных гидроакустических комплексов как источников целеуказания для организации противоторпедной защиты. К таким судам относятся морские транспорты, танкеры, пассажирские суда, ледоколы и др. В военный период они призываются и дооборудуются для выполнения задач в интересах самообороны. Например, в годы второй Мировой войны суда коалиции дооборудовались системами противовоздушной обороны, буксируемыми излучателями шумов. Такие суда в угрожаемый период подлежат дооборудованию и иногда называют призываемыми. В отличие от военных кораблей на призываемых судах, в силу различных ограничений, невозможно размещение вооружения и военной техники (ВиВТ) как на военных кораблях.
Системы противоторпедной защиты (ПТЗ) для призываемых судов должны отличаться простотой устройства и дешевизной, чтобы обеспечить массовость их производства и внедрения.
Система ПТЗ призываемого судна должна иметь средство обнаружения и определения координат торпеды и средства ее нейтрализации в виде приборов гидроакустического противодействия и (или) систем оружия для уничтожения торпед. В любом случае, при применении средств нейтрализации торпеды необходимо иметь данные целеуказания, как минимум - курсовой угол и дистанцию. Движущуюся торпеду можно обнаруживать в режимах шумопеленгования (ШП), гидролокации (ГЛ), а также в режиме обнаружения гидроакустических сигналов (ОГС), в котором определяют параметры зондирующего сигнала активной системы самонаведения (ССН) торпеды и курсовой угол на нее. Обнаружение торпеды в режимах ШП и ОГС и определение курсовых углов на нее не вызывает трудностей ввиду достаточно больших уровней сигнала шумоизлучения торпеды и сигнала ее ССН. Обнаружение торпеды в активном режиме и измерение дистанции до нее вызывает определенные трудности ввиду слабой отражающей способности торпеды, флуктуации эхосигнала и, как результат, сравнительно невысокие дальности и вероятности обнаружения. Условия размещения на призываемых судах не позволяют устанавливать антенны внутри корпуса, т.к. это создает дополнительные трудности, поэтому вполне обоснованным будет оснащение этих судов буксируемыми антеннами. В качестве буксируемой антенны могут применяться либо протяженные шланговые [1], либо буксируемые сосредоточенные, называемые часто антеннами переменной глубины (АПГ), различной формы, например: - цилиндрической формы как ГАС AN/SQS-35 [2] или чечевичной формы [3]. Протяженные шланговые антенны имеют следующие недостатки: невозможность определения борта обнаруженной цели без дополнительного маневра и неравномерность ошибки пеленгования по различным курсовым углам на цель. Буксируемая антенна переменной глубины лишена указанных недостатков и может быть использована на призываемых судах без каких-либо ограничений. Кроме того, АПГ может быть обратимой и работать в пассивных и активном режимах и обеспечивать обнаружение и определение координат по направлению и дальности.
Активный метод гидролокации торпеды обладает таким недостатком, как демаскирование носителя сигналами гидролокатора и создание, тем самым, предпосылок для более раннего наведения торпеды на судно. Пассивные методы определения координат в гидроакустике известны давно [4] и основаны на пространственном разнесении антенн, что практически нереализуемо в условиях призываемого судна. Какие бы гидроакустические средства не использовались судном, организация его противоторпедной защиты обязательно предусматривает применение средств гидроакустического противодействия (ГПД). Обычно надводные корабли используют средства ГПД при обеспечении противоторпедной защиты в виде приборов помех и приборов, имитирующих первичное и вторичное поля корабля и называемые акустическими ловушками («Acustic Decoy») [4], которые могут быть самоходными [5], буксируемыми или дрейфующими [4, 6]. Они имеют два режима излучения помехи: - излучение (имитация) записанного шума корабля и переизлучение ответной импульсной помехи, имитирующей эхосигнал. Такая работа акустических ловушек обеспечивает отведение торпеды на ложное направление и ликвидацию угрозы кораблю. Известные способы ПТЗ применяются на военных кораблях, поэтому стоит задача выделить необходимые элементы (обнаружитель, устройство управления ПТЗ, средства противодействия и нейтрализации торпеды), из которых можно синтезировать новый способ ПТЗ, приемлемый для призываемых судов.
Известен способ гидроакустического обеспечения противоторпедной защиты надводного корабля [7], заключающийся в гидроакустическом наблюдении активной специализированной гидроакустической станцией, обнаружение торпед, определение координат с последующим выстреливанием дрейфующих приборов помех, а при приближении торпеды в ближнюю зону осуществляют ее уничтожение реактивными снарядами [8]. Достоинством такого способа является высокая скорость определения координат и параметров движения торпеды. По одной зондирующей посылке определяются направление, дальность и радиальная скорость торпеды. Применение такой гидроакустической станции возможно на военных кораблях и предполагает размещение антенны в корпусе корабля, защиту ее звукопрозрачным обтекателем и установку акустических экранов для защиты от помех и др.
Недостатками данного способа гидроакустического обеспечения ПТЗ являются:
- недостаточная надежность обнаружения торпеды и выработки целеуказания в активном режиме из-за малой отражающей способности цели;
- снижение скрытности корабля из-за излучения режима гидролокации ГАС и, как следствие, создание дополнительных предпосылок для наведения торпеды на корабль;
- непригодность для призываемых судов в силу невозможности размещения на них указанных средств самообороны;
Известен способ гидроакустического обеспечения противоторпедной защиты военных надводных кораблей "Nexi" [4]. Данный способ основан на использовании буксируемой акустической ловушки торпед, имитирующей первичное и вторичное поле корабля, а также встроенный соленоид, вызывающий срабатывание электромагнитного взрывателя торпеды. Буксируемая акустическая ловушка может буксироваться в определенном секторе кормовых курсовых углов корабля и, имитируя его акустические поля, заставляет торпеду наводиться на эту ложную цель.
При прохождении торпеды вблизи буксируемой акустической ловушки его солиноид инициирует срабатывание электромагнитного взрывателя торпеды и она самоуничтожается. Если торпеда не реагирует на буксируемую акустическую ловушку, применяется выстреливаемая акустическая ловушка из реактивной установки в упрежденную точку трассы торпеды. Целеуказание в этом случае вырабатывается гидроакустическим комплексом, работающим в пассивных режимах ШП и ОГС на носовую антенну в корпусе корабля. Управление системой ПТЗ "Nexi" выполняется автоматизированными средствами оператора.
Недостатками данного способа обеспечения ПТЗ являются:
- недостаточная эффективность буксируемой акустической ловушки ввиду ее небольшой удаленности от кормы корабля и способности торпеды перенацелиться на корабль;
- невозможность устойчивого сопровождения торпеды гидроакустическим комплексом ввиду сильного шумоизлучения буксируемоой ловушки;
- отсутствие данных о дистанции до торпеды снижает эффективность применения выстреливаемых акустических ловушек и может привести к их перерасходу;
- непригодность способа для призываемых судов в силу невозможности размещения на них указанных средств самообороны;
Наиболее близким по совокупности признаков к заявляемому изобретению является способ, реализованный в интегрированной противоторпедной системе «SALTO» [4] военных кораблей. Данная система ПТЗ включает такие подсистемы как гидроакустическую станцию («ALTO»), противодействия торпедной атаке («CONTRALTO») и подсистему управления. Способ гидроакустического обеспечения ПТЗ «SALTO» заключается в своевременном обнаружении торпеды, определении пеленга, величины изменения пеленга, скорости торпеды, параметров зондирующих сигналов ее системы самонаведения подсистемой «ALTO» и на этой основе определение параметров ее движения и выдачу данных целеуказания в подсистему управления, включающую дисплейный пульт оператора. По выработанным данным целеуказания подсистема противодействия «CONTRALTO» осуществляет выстреливание приборов помех, обеспечивает сбрасывание дрейфующих акустических ловушек, а если торпеда прорывается к кораблю осуществляет по ней применение оружия самообороны.
Подсистема гидроакустического обнаружения «ALTO» строится на основе буксируемой антенны: либо протяженной шлангового типа, либо сосредоточенной, называемой антенной переменной глубины (АПГ). Кроме гидроакустической подсистемы ПТЗ в состав вооружения военного корабля входит гидроакустический комплекс с корпусными антеннами, решающий задачи дальнего обнаружения кораблей, выходящих в торпедную атаку. Гидроакустическая подсистема ПТЗ «SALTO» является автономной, но может осуществлять обмен информацией с гидроакустическим комплексом.
Антенна переменной глубины гидроакустической подсистемы ПТЗ имеет ряд преимуществ перед шланговой, т.к. она позволяет однозначно определять борт цели, позволяет буксировку на более высоких скоростях, после маневра корабля не требуется время восстановления антенны.
Управление системой ПТЗ осуществляется с дисплейного пульта оператора соответствующей аппаратурой, которая производит:
- оповещение оператора о приближении торпеды по данным ГАК в режимах ШП и ОГС;
- управление постановкой приборов помех и акустической ловушки для отведения торпед;
- выработку прогноза движения торпеды и расчет данных стрельбы средствами самообороны и выработки маневра уклонения;
- выработку прогноза эффективности противоторпедной защиты корабля;
Недостатками приведенного способа-прототипа применительно к задаче противоторпедной защиты призываемых судов являются:
- непригодность для призываемых судов в силу невозможности размещения на них указанных средств самообороны;
- сложность и большие временные затраты оценки дистанции до торпеды в гидроакустической подсистеме ПТЗ при использовании режимов ШП и ОГС;
Задачей изобретения и техническим результатом от его использования является разработка способа, обеспечивающего возможность создания упрощенной системы противоторпедной защиты призываемых судов.
Для решения поставленной задачи в способ обеспечения противоторпедной защиты корабля, включающий обнаружение и прием шумоизлучения торпеды гидроакустической станцией с буксируемой антенной переменной глубины (АПГ), при обнаружении шумоизлучения торпеды передачу данных в дисплейный пульт оператора, в котором вырабатывают сигнал торпедной опасности и осуществляют сброс дрейфующей акустической ловушки, работающей в режиме излучения имитированного шума судна, включающий также выработку прогноза движения торпеды и расчет данных стрельбы средствами самообороны и выработки маневра уклонения, отличающийся тем, что в качестве буксируемой антенны переменной глубины используют многоканальную антенну со статическим веером из N характеристик направленности, а с началом работы системы самонаведения торпеды в активном режиме и приеме импульсных сигналов самонаведения торпеды режимом ОГС гидроакустической станции, акустическая ловушка переходит в режим излучения ответной импульсной помехи, имитирующей эхосигнал системы самонаведения торпеды от судна, фиксируют время приема сигнала системы самонаведения торпеды и время приема сигнала излученного акустической ловушкой, затем определяют временной интервал между моментом приема сигнала самонаведения торпеды и моментом приема имитирующего сигнала, излученного акустической ловушкой, курсовой угол от АПГ на торпеду определяют по номеру характеристики направленности, в которой произошло обнаружение, контролируют расстояние между АПГ и акустической ловушкой, а дистанцию от торпеды до АПГ рассчитывают как для разнесенной приемной системы «АПГ - акустическая ловушка».
Достижение технического результата обеспечивается выработкой целеуказания на торпеду пассивной ГАС с АПГ путем совместной обработки сигналов акустической ловушки и ССН торпеды.
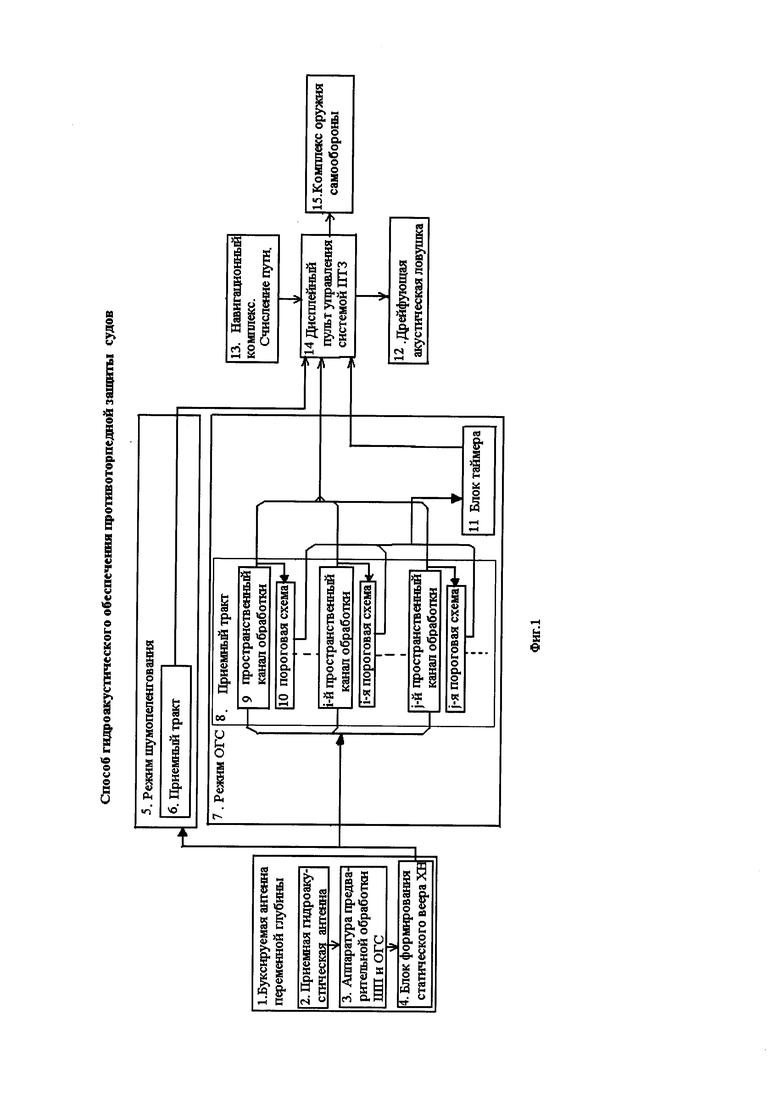
Сущность изобретения поясняется фиг. 1, где представлено устройство, реализующее способ гидроакустического обеспечения ПТЗ судов и фиг. 2, на которой графически поясняется этот способ.
Предлагаемый способ реализуется гидроакустической станцией (фиг. 1) с буксируемой антенной переменной глубины 1, состоящей из цилиндрической антенны 2, преобразующей акустические сигналы в электрические, которые усиливаются и фильтруются на частотные диапазоны аппаратурой предварительной обработки 3, и далее усиленные и отфильтрованные сигналы поступают в блок формирования статического веера характеристик направленности 4, по сформированным пространственным каналам, сигналы низкочастотного диапазона поступают в режим шумопеленгования 5 и обрабатываются многоканальным приемным трактом 6, имеющим традиционную схему построения, например как в [4], обнаруженный сигнал поступает в дисплейный пульт управления ПТЗ 14 для приведения системы ПТЗ в готовность и постановки дрейфующей акустической ловушки 12, а с началом работы активной ССН торпеды высокочастотные сигналы с антенны переменной глубины 1 поступают в режим обнаружения гидроакустических сигналов 7, в приемный тракт 8, содержащий N пространственных каналов 9, соединенных каждый параллельно со своей пороговой схемой 10, настроенной на срабатывание от сигналов ССН торпеды и сигнала излученного акустической ловушкой 12, а каждая пороговая схема 10 соединена с блоком таймера 11, который запускается принятым сигналом ССН торпеды по I-му пространственному каналу и останавливается с получением сигнала акустической ловушки 12 полученному по j-му пространственному каналу, выход блока таймера 11 соединен с дисплейным пультом управления ПТЗ 14, в котором вычисляется задержка времени прихода сигналов от торпеды и от акустической ловушки, одновременно в дисплейный пульт 14 поступают значение дистанции до дрейфующей акустической ловушки 12, вычисляемой в навигационном комплексе 13 по счислению пути, и курсовой угол на торпеду Ωx от I-го пространственного канала, и по этим данным вычисляют в дисплейном пульте 14 оценку дистанции, и далее это значение дальности и курсовой угол поступают в комплекс оружия самообороны для уничтожения торпеды.
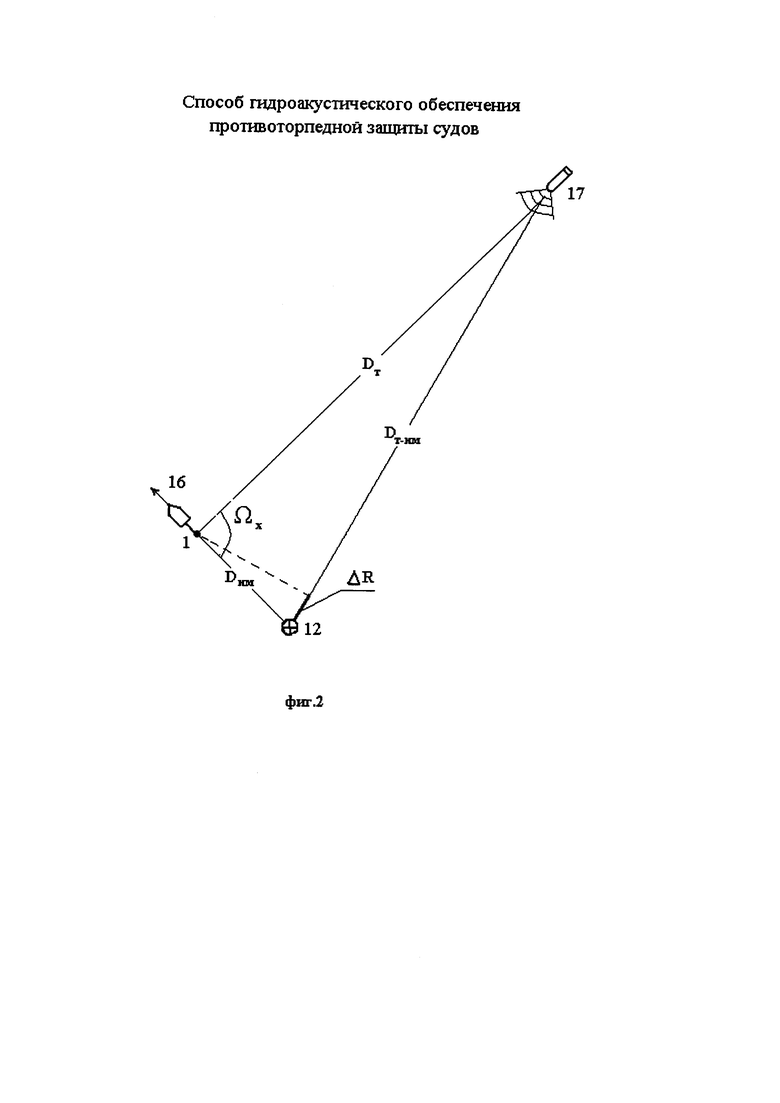
Функционирование предлагаемого способа гидроакустического обеспечения противоторпедной защиты судов графически поясняется на фиг. 2. Судно 16 с буксируемой гидроакустической антенной переменной глубины 1 при движении заданными курсом и скоростью обнаруживает по курсовому углу Ωх торпеду 17 в режиме шумопеленгования по ее шумам и после чего сразу же выставляется дрейфующая акустическая ловушка 12, работающая в режиме излучения шума, имитирующего акустическое поле судна, а при переходе системы самонаведения торпеды в активный режим поиска акустическая ловушка начинает переизлучать ответную импульсную помеху, имитирующую эхосигнал для отведения торпеды 17 на ложное направление, а режим ОГС ГАС обнаруживает оба сигнала от ССН торпеды и от акустической ловушки с определенным временным интервалом ΔТ. Судно 16 контролирует местоположение акустической ловушки, определяя расстояние до нее Dим. Принимая сигнал ССН торпеды и через промежуток времени ΔТ сигнал акустической ловушки, определяют временной интервал Δt прихода сигналов на АПГ 1 и на акустическую ловушку 12, как:

Разность расстояний от торпеды до АПГ 1 и до ловушки 12:

где ΔТ - интервал времени между поступлением на АПГ 1 сигналов от ССН торпеды 17 и акустической ловушки 12;
Dим - расстояние от АПГ 1 до дрейфующей акустической ловушки 12;
Dт - расстояние от АПГ 1 до торпеды 17;
Dт-им - расстояние от торпеды 17 до акустической ловушки 12;
Расчет дистанции до цели по формуле [10]:

Предложенный способ может быть применен на призываемых судах, поскольку не требует установки корпусных антенн, имеет по сравнению с прототипом-аналогом возможность оценки дистанции до торпеды за счет разнесенного приема сигналов ССН торпеды и акустической ловушки и одновременного использования последней для отведения торпеды и тем самым повысить точность целеуказания, что позволяет считать технический результат изобретения достигнутым.
Источники информации
1. Морская радиоэлектроника. Краткий справочник. СПб, «Политехника», 2003 г. Стр. 105-107.
2. Р.Д. Урик. Основы гидроакустики. Ленинград, «Судостроение», стр. 23-25.
3. Из истории отечественной гидроакустики. Сборник статей. СПб, 1998 г., стр. 261.
4. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. СПб, «Наука». 2004 г., стр. 41-43, 54-66, 150-152.
5. Интернет-сайт компании Thomson Marconi and CNIM (Thales Underwater Systems group) (Франция)
6. Имитатор-ретранслятор, Патент США кл. 35-10И №3555165 от 29.0169 РЖ Вооружения №22, 1971 г. 71227742.
7. 50 лет ЦНИИ «Морфизприбор». СПб, 1999 г., стр. 200-201.
8. http//:http://www.rbase.new-factoria.ru/missile/wobb/udav_lm/udav_lm/shtml/Реактивный комплекс противоторпедной защиты кораблей «Удав-1М» (РКПТЗ-1М). 4.02.2015 г.
9. Журнал «Зарубежное военное обозрение» №1, 2009. Стр. 73-81.
10. Я.Д. Ширман. Теоретические основы радиолокации. Сов.радио. Москва, 1970 г. Стр. 494-497.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТОРПЕДЫ | 2012 |
|
RU2492497C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
| ПОДВОДНЫЙ АППАРАТ КОМПЛЕКСНЫЙ | 2016 |
|
RU2640598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| Подводный аппарат с сетевым тралом | 2019 |
|
RU2724218C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
Изобретение относится к гидроакустике и может быть использовано для гидроакустического обеспечения противоторпедной защиты судов. Для гидроакустического обеспечения противоторпедной защиты корабля включают обнаружение и прием шумоизлучения торпеды гидроакустической станцией с буксируемой антенной переменной глубины, выработку прогноза движения торпеды, расчет данных стрельбы средствами самообороны и выработки маневра уклонения. Обнаруженный сигнал поступает в дисплейный пульт оператора, в котором вырабатывают сигнал торпедной опасности и осуществляют сброс дрейфующей акустической ловушки. Акустическая ловушка работает в режиме излучения имитированного шума судна. В качестве буксируемой антенны переменной глубины используют многоканальную антенну со статическим веером из N характеристик направленности. Фиксируют время приема сигналов системы самонаведения торпеды и время приема сигнала, излученного акустической ловушкой. Определяют временной интервал между моментом приема сигнала самонаведения торпеды и моментом приема имитирующего сигнала. Достигается упрощение системы противоторпедной защиты судов. 2 ил.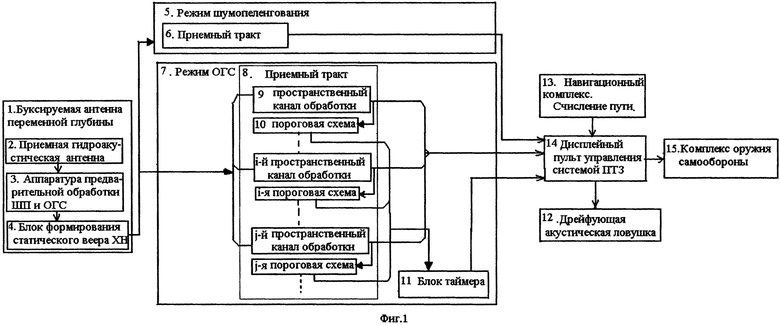
Способ обеспечения противоторпедной защиты корабля, включающий обнаружение и прием шумоизлучения торпеды гидроакустической станцией с буксируемой антенной переменной глубины (АПГ), при обнаружении шумоизлучения торпеды передачу данных в дисплейный пульт оператора, в котором вырабатывают сигнал торпедной опасности и осуществляют сброс дрейфующей акустической ловушки, работающей в режиме излучения имитированного шума судна, включающий также выработку прогноза движения торпеды и расчет данных стрельбы средствами самообороны и выработки маневра уклонения, отличающийся тем, что в качестве буксируемой антенны переменной глубины используют многоканальную антенну со статическим веером из N характеристик направленности, а с началом работы системы самонаведения торпеды в активном режиме и приеме импульсных сигналов самонаведения торпеды режимом ОГС гидроакустической станции акустическая ловушка переходит в режим излучения ответной импульсной помехи, имитирующей эхосигнал системы самонаведения торпеды от судна, фиксируют время приема сигнала системы самонаведения торпеды и время приема сигнала, излученного акустической ловушкой, затем определяют временной интервал между моментом приема сигнала самонаведения торпеды и моментом приема имитирующего сигнала, излученного акустической ловушкой, курсовой угол от АПГ на торпеду определяют по номеру характеристики направленности, в которой произошло обнаружение, контролируют расстояние между АПГ и акустической ловушкой, а дистанцию от торпеды до АПГ рассчитывают как для разнесенной приемной системы «АПГ - акустическая ловушка».
| Приспособление для удаления сердцевины из баклажана | 1930 |
|
SU20394A1 |
| Способ получения безуглеродистого феррохрома | 1959 |
|
SU137126A1 |
| US 4215630 A, 05.08.1980 | |||
| US 3205475 A, 07.09.1965. | |||

