ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу обнаружения вращения и направления вращения ротора согласно ограничительной части пункта 1 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Способ и соответствующие для осуществления способа устройства для отсчета вращений ротора, например, стрелки или диска в измерительном механизме счетчика расхода, известны во множестве вариантов и являются стандартизированными. Так, например, в DE 3340508 С2 описан импульсный датчик для водяного расходомера (счетчика воды) с серийным стрелочно-валиковым счетным механизмом. На несущем диске в качестве импульсного передатчика смонтирован постоянный магнит. Импульсный приемник, установленный вне корпуса счетного механизма при каждом прохождении постоянного магнита выдает счетный импульс. Схожее устройство является предметом DE 10060198 А1. Однако этот вид импульсного датчика не оправдал себя на практике, поскольку он не мог отличить, движется ли счетный механизм в прямом или обратном направлении. В случае раскачивания импульсного датчика перед импульсным приемником возникают большие погрешности; в этом случае счетные импульсы формируются постоянно, хотя счетный механизм не завершил оборот ни в прямом, ни в обратном направлении.
На практике широко распространено применение индуктивных датчиков приближения объекта, использующих индуктивно-емкостной колебательный контур, демпфируемый за счет приближения электропроводящего предмета, и схему обработки сигнала для определения демпфирования колебаний, вызванных демпфирующим звеном. При этом резонансные колебания периодически возбуждаются в индуктивно-емкостном колебательном контуре в такт частоте взятия отсчетов. Затем измеряется время, пока амплитуда резонансных колебаний не опустится ниже заранее установленного порога. Если демпфирующий элемент находится в зоне обнаружения датчика, то время затухания является малым, если демпфирующий элемент находится вне зоны обнаружения датчика, то время затухания - длительное. Если демпфирующий элемент частично находится в зоне обнаружения датчика, то время затухания располагается между этими обеими крайними вариантами; решение относительно того, располагается ли демпфирующий элемент внутри или вне зоны обнаружения, достигается с помощью дополнительно вводимого порога переключения.
Детальное описание приведено в следующих публикациях: DE 3611862 A1, DE 3733943 A1, DE 3733944 C2, EP 0608494 B1, EP 0467753 B1, DE 3923398 C1 и DE 19809031 A1.
Другим свойством известных способов и устройств является количество используемых датчиков. Так, например, в DE 3733943 A1 и DE 3733944 C2 описаны способы и устройства, использующие только один датчик. Также только один датчик, дополнительно выполненный в качестве трансформатора, раскрыт в DE 3611862 А1.
В ЕР 0608494 В1 заявлен детектор вращения, работающий с измерительным датчиком, эталонным датчиком и ротором с тремя различными демпфирующими свойствами.
В EP 0467753 B1 описано устройство для распознавания вращения, работающее с двумя и более измерительными датчиками, причем датчики подключены последовательно. Тем самым предотвращается индуктивная перекрестная модуляция между датчиками, которая может вызвать помехи.
В DE 3923398 C1 раскрыт заявлен детектор вращения для батарейного режима, работающий даже с четырьмя датчиками, из которых каждые два подключают дополнительно друг к другу. Поскольку при возбуждении четырех индуктивно-емкостных колебательных контуров, естественно, потребляется больший ток аккумуляторной батареи, чем при возбуждении одного или двух датчиков, эта схема используется только с мощным аккумулятором или лишь на короткое время.
В DE 19809031 A1 описывается, что три катушки, дополняемые соответствующим конденсатором до индуктивно-емкостного колебательного контура, могут быть изготовлены в виде печатной платы.
На потребление тока аккумуляторной батареи не в последнюю очередь влияет частота взятия отсчетов. Чем выше частота взятия отсчетов, то есть чем чаще возбуждаются колебательные контуры за единицу времени, тем больше потребление тока аккумуляторной батареи. Для уменьшения тока аккумуляторной батареи частота взятия отсчетов должна быть по возможности ниже. Правда, не следует нарушать теорему Шеннона. Теорема Шеннона гласит, что для надежного распознания вращения ротора при каждом обороте должны производиться более двух отсчетов. Из этого следует, что частота взятия отсчетов должна настраиваться на максимально ожидаемое число оборотов, хотя максимальное число оборотов достигается редко или не достигается никогда.
Для сокращения потребления тока аккумуляторной батареи для данных случаев из ЕР 0898152 А1 известно адаптивное изменение частоты взятия отсчетов. В случае простоя ротора частота взятия отсчетов ступенчато понижается, как только ротор снова придет во вращение, снова устанавливается максимальная частота взятия отсчетов. Однако поскольку электроника распознает повторный запуск ротора лишь тогда, когда он закончит по меньшей мере четверть оборота, то это может привести к неправильным измерениям, до тех пор пока снова не будет достигнута полная частота взятия отсчетов.
Если для регистрации оборотов диска, наполовину занятого демпфирующим элементом, используются два датчика, то оба датчика должны быть смещены относительно друг друга на π/2. С помощью вышеупомянутого порога переключения обнаруживается, находится ли демпфирующий элемент перед датчиком или нет. Таким образом, каждый датчик подает два сигнала: демпфирован или соответственно не демпфирован. Тем самым в соответствии с четырьмя квадрантами диска определяются четыре состояния. В результате сравнения последовательных состояний сигнала обнаруживается, повернулся ли диск, соответственно, на π/2 в прямом направлении или на π/2 в обратном направлении. После отсчета четырех последовательных оборотов в прямом направлении обнаруживается полный оборот в прямом направлении, после отсчета четырех последовательных оборотов в обратном направлении - полный оборот в обратном направлении.
Существенным недостатком этих схем является ненадежность решения «демпфирован» или «не демпфирован», если в зоне обнаружения датчика находится лишь кромка демпфирующего элемента. К этому добавляется общая неточность при регистрации моментального времени затухания, обусловленная неточностью измерения амплитуд колебаний и решения относительно того, превысила ли моментальная амплитуда амплитудный порог или находится ниже его. Другими источниками погрешностей являются шум, например, шум квантования, и изменения датчиков в результате старения. Следствием всего этого является то, что частота взятия отсчетов на практике должна устанавливаться намного выше, чем этого требует теорема отсчетов Шеннона. Это связано, соответственно, с повышенным потреблением тока аккумуляторной батареи. Это является недостатком.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В основу изобретения положена задача создания способа более точного обнаружения направления вращения и вращения роторов при одновременном уменьшении потребления тока.
Эта задача решается с помощью способа с признаками пункта 1 формулы изобретения.
Способ согласно изобретению отказывается от принятого на сегодняшний день решения «демпфирован» или «не демпфирован». Вместо этого измеренное время затухания обрабатывается непосредственно. Однако чтобы избегать неточностей из-за датчиков с отличными друг от друга свойствами, из-за различных процессов старения и подобного датчики или их время затухания сначала нормируются, для чего с максимальным, не демпфированным временем затухания, соотносят величину «+1», а с минимальным демпфированным временем затухания - величину «-1», так что измеренное при работе действительное время затухания, к которому применены те же правила нормирования, находится в диапазоне между +1 и -1 в зависимости от того, как далеко демпфирующий элемент находится в зоне обнаружения датчиков. Из измеренного и нормированного времени затухания датчиков образуется вектор в двухмерной системе координат, оси которой располагаются под тем же углом друг к другу, что и оси датчиков. Если, как, преимущественно, принято, оборот диска, наполовину облицованного демпфирующим листовым металлом, обнаруживается с помощью двух датчиков, установленных под прямым углом друг к другу, то вектор заносится в двухмерную прямоугольную систему координат исходя из его нулевой точки. В этой системе координат вектор вращается от измерения к измерению с той же скоростью и в том же направлении, что и контролируемый ротор. Тем самым в каждый момент взятия отсчетов известно моментальное угловое положение контролируемого ротора, а не только, как прежде, более или менее точное завершение поворота на π/2.
На основании того факта, что соответствующее угловое положение контролируемого ротора известно точно, в результате сравнения последовательных угловых положений можно гораздо надежнее определить, вращается ли ротор, в каком направлении он вращается и когда завершится полный оборот в прямом или обратном направлении. Благодаря этому повышенному разрешению каждого отдельного измерения может быть явно понижена частота взятия отсчетов и тем самым снижено потребление тока аккумуляторной батареи.
Другим преимуществом является нормирование максимального и минимального времени затухания, с помощью которой исключаются индивидуальные отклонения датчиков. Это действительно, в частности, тогда, когда согласно одному из предпочтительных вариантов выполнения изобретения этапы нормирования повторяются с интервалами во времени.
Вследствие периодичности тригонометрических уравнений случаются скачки величин, если угол вектора превысит порог в 360° или опустится ниже порога в 0°. Поскольку направление вращения ротора между двумя измерениями сначала не известно, то это как в результате вращения в обратном направлении, так и в результате скачка за порог в 360° при вращении в прямом направлении, может привести, например, к отрицательной разности измеренных углов. Однако желательно, чтобы можно было надежно установить, когда закончился полный оборот ротора в прямом или обратном направлении. Чтобы добиться этого, действительная разность углов определяется с помощью уравнений, указанных в пункте 2 формулы изобретения. С помощью первого из этих уравнений проверяется, не произошел ли скачок за нулевую линию, с помощью второго, произошел ли скачок за нулевую линию в прямом направлении, с помощью третьего, произошел ли скачок за нулевую линию в обратном направлении. Самая малая из трех расчетных величин В1, В2 или В3 соответствует возможно более короткой угловой дуге, которую мог пройти ротор между предыдущим и текущим измерениями.
Чтобы, помимо вычисленной с помощью уравнений В1, В2 и В3 длины дуги угла поворота, пройденного после последней выборки отсчетов, определить также направление вращения, с помощью уравнений С1, С2 и С3 из пункта 2 формулы изобретения определяется знак и тем самым направление вращения. Положительный знак означает вращение в прямом направлении, отрицательный знак означает вращение в обратном направлении.
Согласно одному из усовершенствованных вариантов изобретения частота взятия отсчетов может быть уменьшена, если величина разностных углов опускается ниже первого порога, и может быть снова увеличена, если величина разностных углов превысит второй порог.
Предпочтительно, изобретение используется при применении двух датчиков на угловом расстоянии π/2 и диска, наполовину занятом демпфирующим элементом, в качестве ротора.
В этом случае текущий угол вектора, образованного из измеренного и нормированного времени затухания, может рассчитываться с помощью функций, указанных в пункте 6 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже изобретение более подробно поясняется на примерах выполнения, на которых показано:
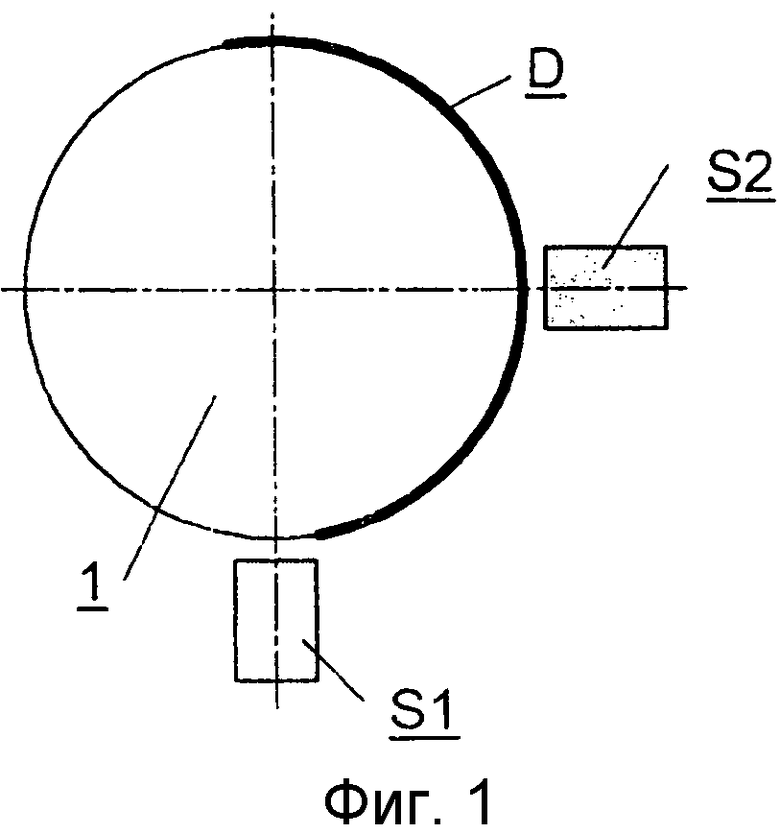
фиг.1 - чисто схематичное устройство для регистрации вращения двухмерного ротора;
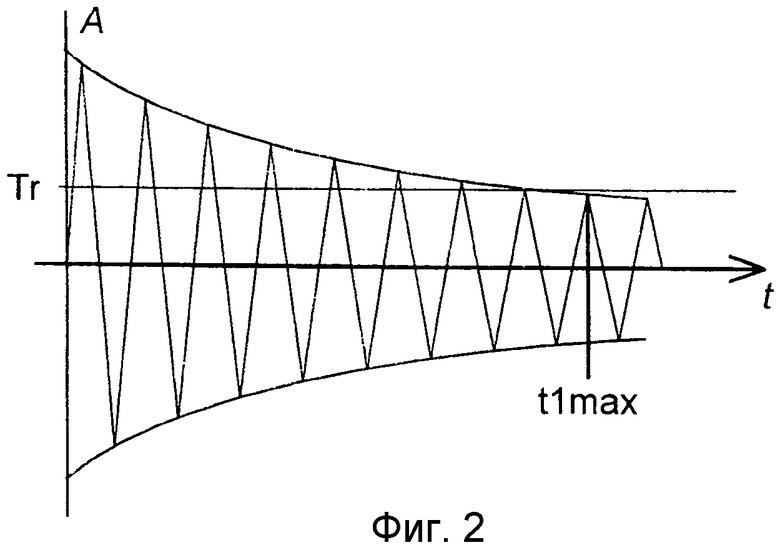
фиг.2 - упрощенный вид процесса затухания не демпфированного датчика;
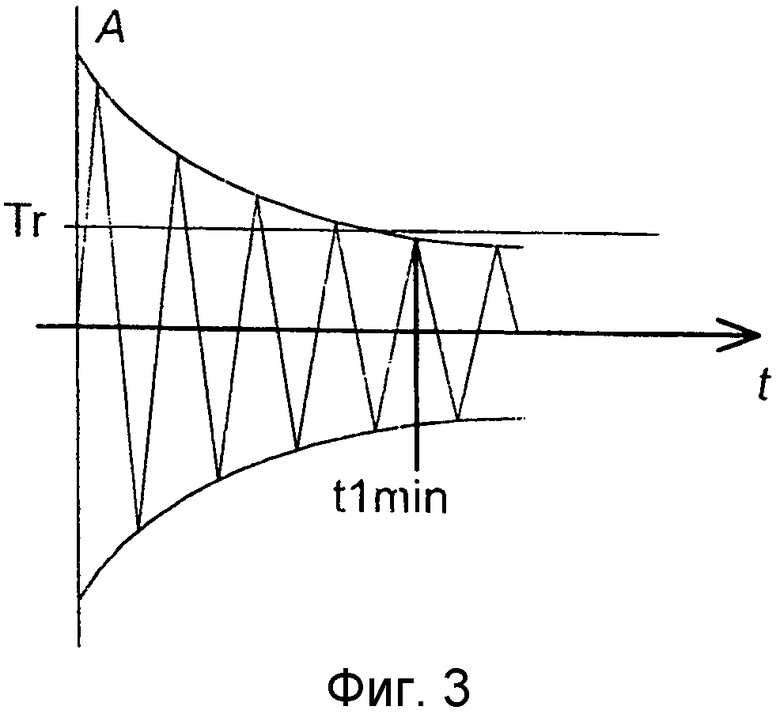
фиг.3 - упрощенный вид процесса затухания максимально демпфированного датчика;
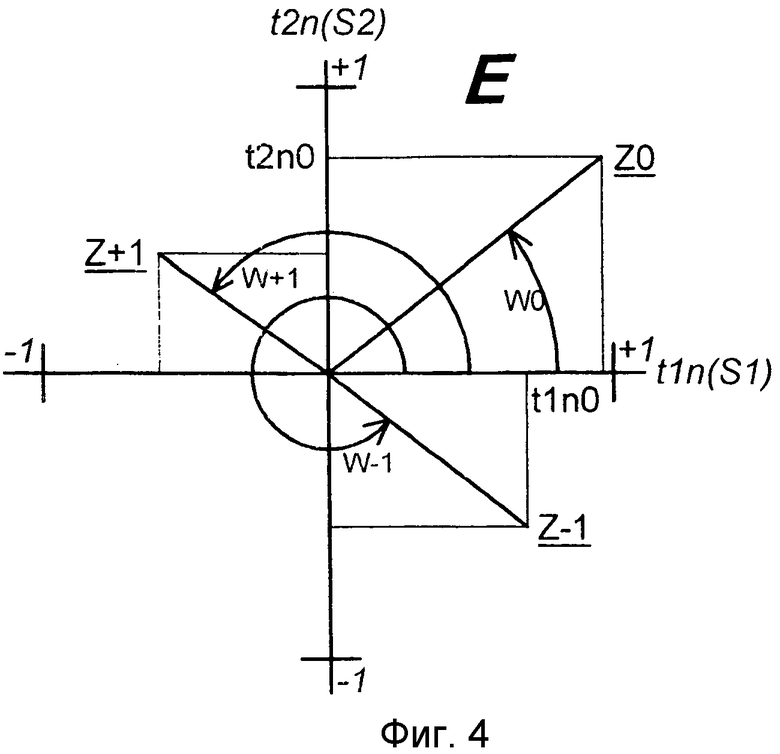
фиг.4 - оценку вращения изображенного на фиг.1, двухмерного ротора в двухмерной плоской системе координат, нормированной на величины между +1 и -1;
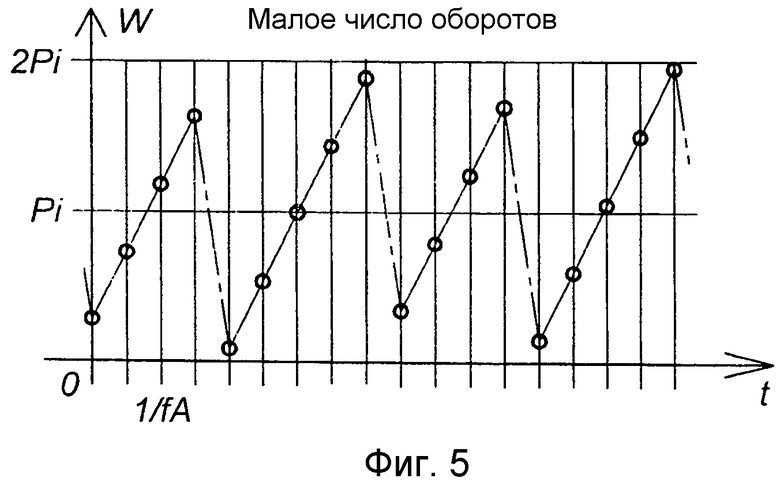
фиг.5 - положение и последовательность моментов измерения в случае ротора, вращающегося с малым числом оборотов;
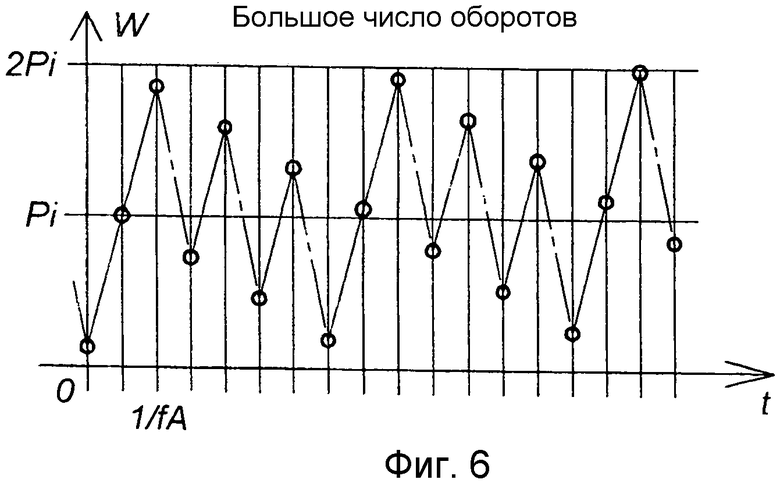
фиг.6 - положение и последовательность моментов измерения в случае ротора, вращающегося с большим числом оборотов.
ПУТИ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ И ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
На фиг.1 чисто схематично изображен ротор 1 в виде диска, наполовину занятого демпфирующим элементом D. На небольшом расстоянии от ротора 1 и на угловом расстоянии π/2 друг к другу установлены два датчика S1 и S2. Датчики S1 и S2 образованы индуктивно-емкостными колебательными контурами, колебания в которых возбуждаются в такт частоте fA взятия отсчетов (см. фиг.6 и 7). Время затухания зависит от того, находится ли демпфирующий элемент D полностью, частично или вообще отсутствует в зоне обнаружения датчиков S1 и S2.
На фиг.2 в упрощенном виде показано время затухания датчика в максимально не демпфированном состоянии. Соответствующее максимально не демпфированное время t1 max затухания - это промежуток времени, пока амплитуда А колебаний не опустится ниже заданного порога переключения.
На фиг.3 аналогично изображены процессы при максимально демпфированном датчике S1. Порог Tr переключения тот же, что и на фиг.2. Минимальное время t1min затухания существенно короче, чем t1max.
На фиг.4 изображена двумерная прямоугольная система Е координат, соответствующая примеру выполнения на фиг.1. Диапазоны величин обеих осей нормированы на величины +1 и -1. При этом величина +1 по оси t1n(S1) соответствует величине t1max на фиг.2, величина -1 - величине t1min на фиг.3.
То же относится к величинам второго датчика S2 по второй оси, обозначенной как t2n(S2).
Величины, действительно измеренные датчиками S1 и S2, находятся между t1max и t1min. Благодаря применению тех же правил нормирования в изображении на фиг.4 они располагаются между +1 и -1. Из последовательно измеренных и нормированных величин t1n, t2n в системе Е координат образуются и наносятся векторы Z.
На фиг.4 нанесены три вектора Z-1, Z0 и Z+1. Вектор Z0 образуется с помощью векторного сложения измеренной и нормированной величины t1n0 датчика S1 и измеренной и нормированной составляющей t2n0 датчика S2. Текущий векторный угол W0 может быть вычислен на основании уравнения W0 = arctan(t2n0/t1n0). В общем случае векторный угол W определяется по формулам:
Соответственно вычисляется векторный угол W+1 последующего вектора Z+1, точно также вычисляется векторный угол W-1 предшествующего вектора Z-1.
Как показано на фиг.4, векторный угол W0 текущего вектора Z0 меньше векторного угла W-1 предшествующего вектора Z-1. Однако никакого вращения в обратном направлении не произошло, произошло вращение в прямом направлении за нулевую линию. Чтобы обнаружить действительное направление вращения и тем самым пересечение нулевой линии, или завершение полного оборота, величина минимальной разности ∆W углов между Z-1 и Z0 определяется с помощью следующего уравнения:
|∆W| = min{|(W0)-(W-1)|, |(W0)-(W-1)+2π|, |(W0)-(W-1)-2π|}
Понятно, что при вращении ротора 1 в обратном направлении при опускании ниже нулевой линии текущий векторный угол будет явно больше предшествующего векторного угла. В данном случае ясность также достигается путем выбора минимальной величины |∆W|.
На фиг.5 и 6 показаны положение и количество моментов взятия отсчетов в такт частоте fA взятия отсчетов при малом числе оборотов (фиг.5) и большом числе оборотов (фиг.6) для направления вращения.
У ротора с малым числом оборотов, изображенного на фиг.5, получается больше моментов взятия отсчетов на оборот, у ротора с большим числом оборотов, изображенного на фиг.6, получается меньше моментов взятия отсчетов на оборот. Кроме того, показано, что векторные углы W располагаются лишь между 0 и 360°, или между 0 и 2π. Однако обусловленная этим многозначность результатов измерений может, как описано выше, исключаться с помощью дополнительных критериев, например, расчета минимальной разности углов и соответствующего знака (Signum).
В любом случае текущее положение ротора 1 и тем самым его вращение в прямом и обратном направлениях может регистрироваться с большой надежностью. С помощью обработки углов, определенных посредством повышенного разрешения, добиваются того, чтобы даже при небольшом количестве точек измерения на оборот, то есть при пониженной частоте взятия отсчетов, вращения и направления вращения ротора 1 могли регистрироваться с большой надежностью. С помощью способа согласно изобретению частота взятия отсчетов по сравнению с обычным способом по меньшей мере при той же надежности регистрации вращения и направления вращения сокращается почти наполовину.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демодуляции сигналов | 2022 |
|
RU2786193C1 |
| Способ динамических испытаний роторов | 1991 |
|
SU1827555A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1983 |
|
SU1137561A1 |
| СПОСОБ ПОСТРОЕНИЯ ДИНАМИЧЕСКОЙ МОДЕЛИ ЭКВИВАЛЕНТНОЙ УПРУГОЙ СИСТЕМЫ МЕТАЛЛОРЕЖУЩЕГО СТАНКА В ЗОНЕ РЕЗАНИЯ | 1996 |
|
RU2130598C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483319C2 |
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ | 1997 |
|
RU2135730C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476986C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СВЕРХМАЛЫХ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2359406C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476985C1 |
| МНОГОШКАЛЬНОЕ ФАЗОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ M ПАРАМЕТРОВ | 1992 |
|
RU2029963C1 |
Изобретение относится к способу обнаружения вращения и направления вращения ротора. На роторе (1) позиционирован по меньшей мере один демпфирующий элемент (D), причем на небольшом расстоянии от ротора (1) и демпфирующего элемента (D) установлены два датчика (S1, S2) на расстоянии друг от друга. Датчики (S1, S2) образуют колебательные контуры, демпфируемые в большей или меньшей степени в зависимости от положения демпфирующего элемента (D). После проведения нормирования осуществляют измерения путем отслеживания последовательных положений угла поворота, для чего текущее время затухания датчиков (S1, S2) измеряется в такт частоте взятия отсчетов, а затем к измеренному времени затухания датчиков (S1, S2) применяются правила нормирования. Затем из этих величин образуется вектор, который заносится в систему координат. После этого определяется текущий векторный угол и сравнивается с величиной соответствующего предшествующего векторного угла. В результате сравнения делается вывод о том, вращается ли ротор (1) и выполнено ли это вращение в прямом или обратном направлении. В результате повторения измерений в такт частоте взятия отсчетов вращательные движения ротора (1) регистрируются с большой точностью. 6 з.п. ф-лы, 6 ил.
1. Способ обнаружения вращения и направления (V, R) вращения ротора (1), включающий в себя:
- позиционирование по меньшей мере одного демпфирующего элемента (D) на роторе (1),
- позиционирование двух датчиков (S1, S2), образованных колебательным контуром, смещенных относительно друг друга, и на небольшом расстоянии от ротора (1) и демпфирующего элемента (D),
- генерирование частоты (fA) взятия отсчетов,
- кратковременное периодическое возбуждение колебаний датчиков (S1, S2) в такт частоте (fA) взятия отсчетов,
- регистрацию времени (t1, t2) затухания датчиков (S1, S2),
- преобразование времени (t1, t2) затухания в угловые положения вращения ротора (1),
- сравнение последовательных угловых положений вращения для определения направления (V, R) вращения,
- отслеживание последовательных угловых положений вращения для распознания полного оборота,
отличающийся тем что:
осуществляют нормирование путем
i. определения максимального времени (t1max) затухания не демпфированного первого датчика (S1),
ii. определения минимального времени (t1min) затухания демпфированного первого датчика (S1),
iii. нормирования максимального времени (t1max) затухания не демпфированного первого датчика (S1) на величину +1,
iv. нормирования минимального времени (t1min) затухания демпфированного первого датчика (S1) на величину -1,
v. повторения этапов нормирования для другого датчика (S2) и проведения измерений путем
i. измерения текущего времени (t1, t2) затухания датчиков (S1, 32) в такт частоте (fA) взятия отсчетов,
ii. применения правил нормирования к измеренному времени (t1, t2) затухания датчиков (S1, S2),
iii. образования вектора (Z) из нормированных величин измеренного времени (t1n, t2n) затухания и, исходя из его нулевой точки, внесения вектора (Z) в систему (Е) координат, размерность которой соответствует числу используемых датчиков (S1, S2),
iv. определения текущего векторного угла (W0),
v. сравнения текущего векторного угла (W0) с величиной соответствующего предшествующего угла (W-1),
vi. определения вращения ротора (1),
vii. определения направления вращения (V, R),
viii. и повторения измерений в такт частоте (fA) сканирования.
2. Способ по п.1, отличающийся тем, что:
- для определения разности (ΔW) углов поворота между текущим векторным углом (W0) и предшествующим векторным углом (W-1) используют следующие уравнения:
- величину действительной разности (AW) углов поворота между текущим и предшествующим измерением получают на основании того из этих трех уравнений (B1, В2, В3), которое имеет минимальную величину (=min(B1, В2, В3),
- направление вращения вектора (Z), или ротора (1), между текущим и предшествующим измерением получают по знаку (Signum) того уравнения С1, С2 или С3, которое принадлежит уравнению B1, B2, В3 с минимальной величиной,
- положительный знак (Signum) соответствует прямому направлению (V), отрицательный знак (Signum) - обратному направлению (R).
3. Способ по п.2, отличающийся тем, что:
- действительную разность углов получают из произведения того уравнения В1, B2 или В3 с минимальной величиной и соответствующему знаку (Signum) С1, С2 или С3.
4. Способ по п.1, отличающийся тем, что:
- повторение нормирования осуществляют с временными интервалами.
5. Способ по любому из пп.1-4, отличающийся тем, что:
- частоту (fA) взятия отсчетов сокращают, если разностный угол |(ΔW)| опускается ниже первого порога,
- частоту (fA) взятия отсчетов снова повышают, если разностный угол |(ΔW)| превышает второй порог.
6. Способ по п.1, отличающийся тем, что:
- векторный угол (W) определяют с помощью формул
W=arctan(t2n/t1n), если t1n≥0 и t2n≥0,
W=arctan(t2n/t1n)+π, если t1n<0,
W=arctan(t2n/t1n)+2π, если t1n≥0, a t2n<0.
7. Способ по п.l, отличающийся тем, что:
- диск используют в качестве ротора (1).
| DE 19725806 A1, 28.01.1999 | |||
| Устройство матрицирования трех цветовых сигналов в цветоразностные сигналы | 1975 |
|
SU608494A3 |
| Муфта Г.Ф. Дружинина для передачи вращения через герметичную перегородку | 1980 |
|
SU898152A2 |
| Шлаковая фурма доменной печи | 1978 |
|
SU720021A1 |
| JP 60001567 A, 07.01.1985 | |||
| Металлическая литейная форма для технологических проб | 1984 |
|
SU1207625A2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Устройство для определения направления вращения | 1988 |
|
SU1631441A1 |

