Изобретение относится к машиностроению и может быть использовано для экспериментальной оценки динамического качества станков и других машин.
Цель изобретения - повышение точности и производительности динамических испытаний.
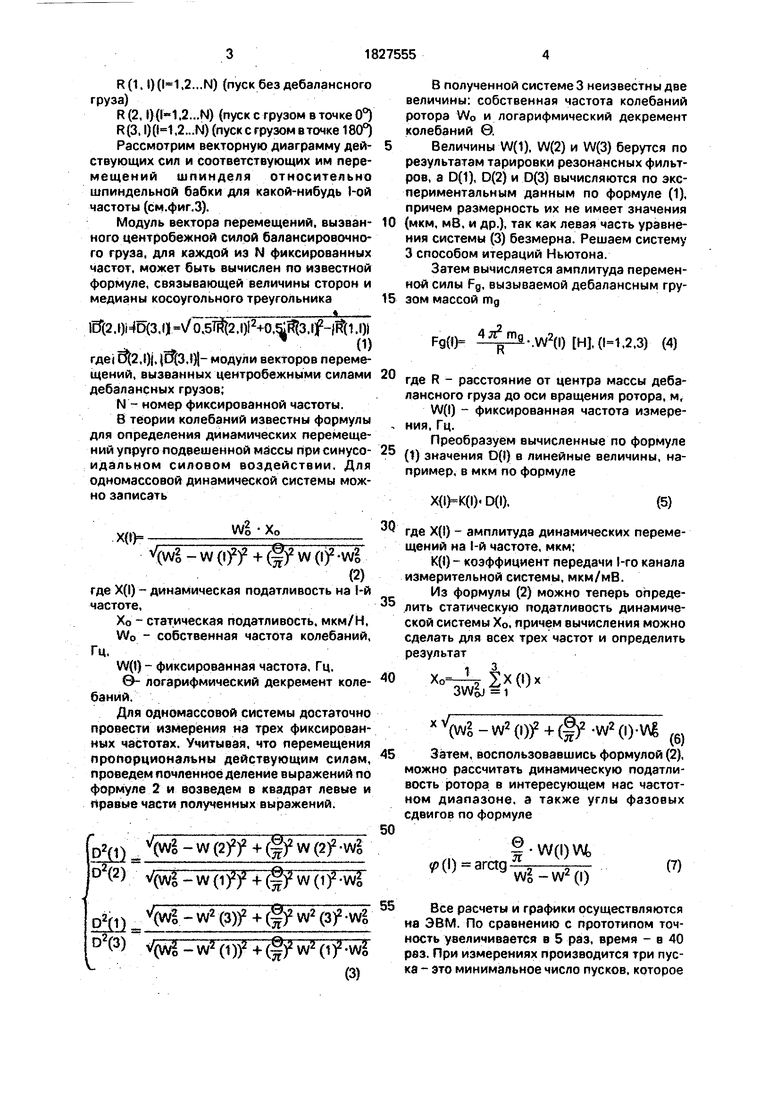
На фиг.1 представлен общий вид ротора: на фиг.2 - разрез А-А на фиг.1; на фиг.З - векторная диаграмма сил.
Испытуемый ротор 1 содержит уста нов- ленный в кольцевом пазу 2 дебалэнсный груз 3. зафиксированный в определенном положении винтом 4 и ответную поверхность 5,с которой взаимодействует бесконтактный датчик 6 относительных колебаний, связанный проводами с контрольно-измерительной аппаратурой и ЭВМ.
Способ реализуется следующим образом.
Заготовка (не показана) закрепляется на роторе 1, включается привод (не показан) ротора 1. который разгоняет последний до
максимальной частоты вращения и затем отключается. На выбеге ротора 1 производится измерение, амплитуд на N различных фиксированных частотах.
Ротор 1 затормаживают и устанавливают груз в кольцевой паз 2 на отметке 0° (1 положение), закрепляют его винтом 4, Масса груза заранее известна. Включается привод, и ротор 1 разгоняется до максимальной частоты вращения. На выбеге ротора 1 (свободное вращение) производятся измерения амплитуд колебаний на тех же фиксированных N частотах. Далее ротор 1 затормаживают и переставляют груз 3 в диаметрально противоположное положение (на 180°), закрепляют винтом 4, включают привод и разгоняют ротор 1 до максимальной частоты вращения. На выбеге ротора 1 датчиком 6 замеряют амплитуду колебаний на указанных фиксированных частотах.
Обозначим зафиксированные амплитуды колебаний;
00
ND
ч
СЛ СЛ СЛ
R (1.1) (.2...N) (пуск без дебалансногоВ полученной системе 3 неизвестны две
груза)величины: собственная частота колебаний
R (2,1)(.2...N) (пуск с грузом в точке 0°)ротора W0 и логарифмический декремент
R{3,1)(,2...N) (пуск с грузом вточке 180°)колебаний 0.
Рассмотрим векторную диаграмму дей-5 Величины W(1), W(2) и W(3) берутся по ствующих сил и соответствующих им пере-результатам тарировки резонансных фильт- мещений шпинделя относительноров, а 0(1), 0(2) и 0(3) вычисляются по экс- шпиндельной бабки для какой-нибудь 1-ойпериментальным данным по формуле (1), частоты (см.фиг.З).причем размерность их не имеет значения
Модуль вектора перемещений, вызван-10 (мкм, мВ, и др.), так как левая часть уравненого центробежной силой балансировочно-ния системы (3) безмерна. Решаем систему
го груза, для каждой из N фиксированных3 способом итераций Ньютона,
частот, может быть вычислен по известнойЗатем вычисляется амплитуда переменформуле, связывающей величины сторон иной силы Fg, вызываемой дебалансным грумедианы косоугольного треугольника15 зом массой mg
ID(2.0i4D(3,a /o;5TKl2.l)l2+0,5:Rl3.lf-(1.1))4 л2 mQ
(1)Fg(l) -.W2(l)tH, (.2.3) (4) гдв| DX2,I)|. |B(3,t)|- модули векторов перемещений, вызванных центробежными силами20 где R рзсстояние от центра массы деба- дебалансных грузов;лансного груза до оси вращения ротора. мг
N - номер фиксированной частоты.w(|) фиксирован„ая частота измереВ теории колебаний известны формулыния рц
для определения динамических перемеще- Преобразуем вычисленные по формуле ний упруго подвешенной массы присинусо-25 {t) значения D(l) B линейные величины, на- идальном силовом воздействии. Дляпример, в мкм по формуле одномассовой динамической системы можно записатьX((I). D(l). (5)
Хо3Q где Х(1) - амплитуда динамических переме -2 55©35-Тщений на 1-й частоте, мкм,V(W0 - W (у + ( W (Ґ -W0К(0 - коэффициент передачи 1-го канала
(2)измерительной системы, мкм/мВ.
где Х(1) - динамическая податливость на 1 йИз формулы (2) можно теперь опредечастоте,35 лить СТЗтическую податливость динамичеХо - статическая податливость. мкм/Н,ской системы Х0, причем вычисления можно
W0 - собственная частота колебаний,сделать для всех трех частот и определить
Гц,результат
W0) - фиксированная частота, Гц. з
0- логарифмический декремент коле- 0 Xcr 2 Х(0Х
баний.3W 1 Для одномассовой системы достаточно
провести измерения на трех фиксирован-(W2 -W2))2 + ( W2(I)-W&
ных частотах. Учитывая, что перемещенияя W
пропорциональны действующим силам,45 Затем, воспользовавшись формулой (2),
проведем почленное деление выражений поможно рассчитать динамическую податлиформуле 2 и возведем в квадрат левые ивость Р°т°Ра в интересующем нас частотправые части полученных выражений.ном диапазоне, а также углы фазовых
сдвигов по формуле 50
D2(D V(WQ w С2)2)2 + (g)2 w V -WQJ-WCQW,
(0 arct9w20-w2(i)(7)
j- ш2Гоч 2 ,Г Х2Ш2Г.Ш255 Все расчеты и графики осуществляются
Р(1) ... ° я/ W v3 Woна ЭВМ. По сравнению с прототипом точrj2/-.j .- 2-3©3-2 2-5 ность увеличивается в 5 раз, время - в 40
; (Wo - W (1)f + (jff W (1 f -Woраз. При измерениях производится три пус(3)ка это минимальное число пусков, которое
позволяет построить векторную диаграмму (треугольник, в котором по двум сторонами медиане находят третью сторону - амплитуАУ).
Формула изобретения Способ динамических испытаний роторов, заключающийся в том. что вращают ротор, прикладывают к нему силу переменной частоты и амплитуды и регистрируют относительные колебания ротора, о т л и.
чающийся тем. что, с целью повышения точности и производительности, силу создают путем установки на роторе груза заданной массы поочередно в двух диаметрально противоположных положениях, производят не менее трех пусков ротора, два из них - с грузом, а один - без него, и регистрируют относительные колебания ротора на фиксированных частотах вращения при его выбеге,
V
/ f #t#oe
иеЗ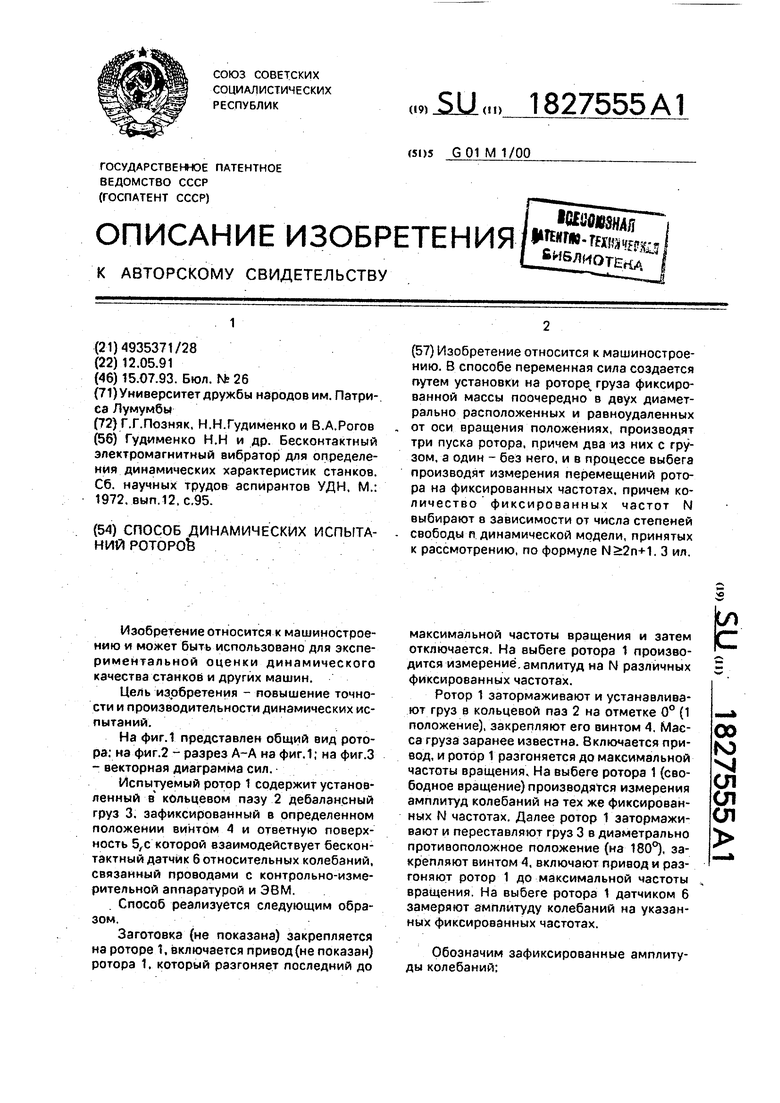
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ РЕЗОНАНСНЫХ АМПЛИТУД ПРИ ПЕРЕХОДНЫХ ПРОЦЕССАХ В ВИБРАЦИОННЫХ МАШИНАХ | 2020 |
|
RU2758344C1 |
| СПОСОБ ПУСКА ВИБРАЦИОННОЙ МАШИНЫ С ДВУМЯ САМОСИНХРОНИЗИРУЮЩИМИСЯ ДЕБАЛАНСНЫМИ ВИБРОВОЗБУДИТЕЛЯМИ | 2012 |
|
RU2516262C2 |
| АСИНХРОННАЯ КОМПЕНСИРОВАННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1996 |
|
RU2112307C1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВРАЩЕНИЯ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ РОТОРА | 2010 |
|
RU2517825C2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНЕРЦИОННОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СИЛЫ, ВЫЗЫВАЮЩЕЙ ДВИЖЕНИЕ | 1994 |
|
RU2110432C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 1987 |
|
RU2079120C1 |
| ИНЕРЦИОННЫЙ ВИБРАТОР С ВЫДВИЖНЫМ ДЕБАЛАНСОМ | 1971 |
|
SU298515A1 |
| Инерционная конусная дробилка | 1978 |
|
SU759122A1 |
Изобретение относится к машиностроению. В способе переменная сила создается путем установки на роторе,, груза фиксированной массы поочередно в двух диаметрально расположенных и равноудаленных от оси вращения положениях, производят три пуска ротора, причем два из них с грузом, а один - без него, и в процессе выбега производят измерения перемещений ротора на фиксированных частотах, причем количество фиксированных частот N выбирают в зависимости от числа степеней свободы п динамической модели, принятых к рассмотрению, по формуле . 3 ил.
| Гудименко Н.Н и др | |||
| Бесконтактный электромагнитный вибратор для определения динамических характеристик станков | |||
| Сб | |||
| научных трудов аспирантов УДН | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
