Предлагаемые изобретения относятся к видеотехнике, приборостроению, измерительной и информационной технике, точнее к оптико-электронным приборам обнаружения движущихся объектов.
Известны устройство и способ оптико-электронного кругового обзора [см. патент РФ №2321016, кл. G01S 3/78, БИ №9, Ч.4, 2008 г.], организующие прием ИК-излучения, прием лазерного излучения и формирование информационного сигнала. Прием ИК-излучения выполнен с возможностью вращения в азимутальной плоскости приводом с датчиком угла. Приемник излучения состоит из трех идентичных измерительных ИК-каналов, каждый из которых имеет объектив, плоское зеркало, фотоприемное устройство и блок обработки сигнала. Оси указанных объективов равномерно развернуты в азимутальной плоскости и наклонены к ней по вертикали под различными углами. Прием лазерного излучения выполнен панорамным, фотоприем организован в виде секторно-кольцевой многоплощадочной структуры и формирования сигнала наличия лазерного излучения и его направления в азимутальной плоскости.
Недостатками данного устройства и способа являются сложность и недостаточная точность видеонаблюдения.
За прототип приняты способ и устройство видеонаблюдения с использованием домашнего видеомагнитофона [см. заявку РФ №2006114896, кл. H04N 5/765, БИ №32, 2007 г.], включающие видеокамеру наблюдения (видеоглазок), устройство, определяющее период записи сигнала на магнитофон (детектор движения) и устройство сопряжения видеомагнитофона и детектора движения, вместо контроллера механического нажатия кнопок «Start» или «Stop» пульта дистанционного управления предлагается использовать триггерное устройство сопряжения видеомагнитофона и детектора движения, замыкающее на время около 1 с клеммы записи или отмены записи видеомагнитофона «Rec» или «Stop» соответственно и тем самым включающее запись на период записи или отключающее ее.
Недостатками прототипов являются ограниченные функциональные возможности и низкая метрологическая эффективность кругового панорамного видеонаблюдения из-за фиксированного угла видеосъемки, регламентированного неподвижным детектором движения.
Технической задачей способа и устройства является повышение метрологической эффективности за счет автоматизации кругового панорамного видеонаблюдения с регламентированной точностью нормируемой меры фазы угла поворота в азимутальной плоскости.
Поставленная техническая задача достигается тем, что:
1. В способе видеонаблюдения, включающем видеокамеру с видеомагнитофоном, ИК-детектор движения объекта видеонаблюдения и устройство сопряжения ИК-детектора движения и видеокамеры с видеомагнитофоном, в отличие от прототипа, видеонаблюдение организуют с возможностью вращения видеокамеры в азимутальной плоскости по многофазному углу поворота видеоизображения синхронно с приемом ИК-излучения ИК-детектором движения от ИК-генератора излучения, размещаемого на объекте видеонаблюдения, за счет сканирования приводом с устройством сопряжения в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты выше 10 Гц.
2. В способе по п.1, в отличие от прототипа, сканирование в азимутальной плоскости угла поворота фазы тактовыми импульсами фиксированной частоты организуют в коде последовательным приближением нормированного значения к измеряемому значению за счет алгебраического суммирования реверсивных приращений фазы, регистрируемых в виде разницы между измеренным и нормированным значениями.
3. В устройстве видеонаблюдения, включающем видеокамеру с видеомагнитофоном, ИК-детектор движения объекта и устройство сопряжения, в отличие от прототипа, видеокамера водружена на сканер ИК-детектора движения, организующего вращение в азимутальной плоскости от ИК-генератора излучения приводом с устройством сопряжения угла поворота фазы, который расположен соосно с ИК-детектором движения между подвижной и неподвижной секторно-кольцевыми структурами сканера.
4. В устройстве по п.3, в отличие от прототипа, привод с ИК-детектором движения многофазного угла поворота и устройством сопряжения организован по следящей структуре из последовательного соединения ИК-детектора движения многофазного угла поворота, устройства сопряжения, включающего цифроаналоговый преобразователь и усилитель мощности, и исполнительного механизма вращения в азимутальной плоскости.
5. В устройстве по п.3, в отличие от прототипа, ИК-генератор излучения в азимутальной плоскости выполнен на ИК-светодиоде с автономным источником питания в декоративном исполнении, например в форме значка, размещаемого на объекте съемки.
6. В устройстве по п.3, в отличие от прототипа, ИК- детектором движения многофазного угла поворота служит ИК-фотодиодная матрица из 2m+1 фотодиодов, подключенных входами к источнику питания, а выходами - к управляющим входам реверсивного счетчика, причем центральный фотодиод матрицы соединен со входом его обнуления, первые m-фотодиоды объединены с суммирующим, а вторые m-фотодиоды - с вычитающим входами реверса счетчика, счетный вход которого является синхронизирующим входом тактовой частоты более 10 Гц, а его выходы организуют разряды кода ИК-детектора движения многофазного угла поворота, соответственно разрядности 2m+1 фотодиодам матрицы.
Сущность способа и устройства поясняется фиг.1-3 на уровне временной диаграммы фиг.1, а и алгоритма фиг.1, b, структурных схем фиг.1, с и фиг.2 и кинематики фиг.1, d.
Сущность предлагаемого способа (фиг.1) видеонаблюдения видеокамерой с ИК-детектором движения и устройством сопряжения заключается в том, что видеонаблюдение организуют с возможностью вращения видеокамеры в азимутальной плоскости по многофазному углу φ поворота видеоизображения. Вращение на угол φ осуществляется синхронно с приемом ИК-излучения ИК-детектором движения на i сегментов,  , нормированных по фазе φ0=π/m угла поворота, т.е. φ=iφ0 (см. фиг.1, d). ИК-детектор движения регистрирует излучение от ИК-генератора, размещаемого на объекте видеосъемки. Вращение организуют приводом с ИК-детектором движения в азимутальной плоскости пропорционально углу поворота фазы φ тактовыми импульсами частоты F0 выше 10 Гц. Это обусловлено реакцией объекта за время Т0, которое для нормального человека составляет больше 0,1 с. Частота F0 определяется минимальным кодом N0=1 за период Т0:
, нормированных по фазе φ0=π/m угла поворота, т.е. φ=iφ0 (см. фиг.1, d). ИК-детектор движения регистрирует излучение от ИК-генератора, размещаемого на объекте видеосъемки. Вращение организуют приводом с ИК-детектором движения в азимутальной плоскости пропорционально углу поворота фазы φ тактовыми импульсами частоты F0 выше 10 Гц. Это обусловлено реакцией объекта за время Т0, которое для нормального человека составляет больше 0,1 с. Частота F0 определяется минимальным кодом N0=1 за период Т0:
F0≥N0/T0=1/0,1=10 Гц.
Предлагаемый способ реализует устройство видеонаблюдения (см. фиг.2) с использованием видеокамеры (1.1), включающей видеомагнитофон (1.2), ИК-детектор движения (2) объекта и устройства сопряжения (3). Видеокамера 1.1 водружена на сканер 2.1 (см. фиг.1, d) ИК-детектора движения 2, организующего вращение в азимутальной плоскости от ИК-генератора 4.1 излучения и его направления. ИК-генератор 4.1 излучения выполнен на ИК-светодиоде D с автономным источником питания в декоративном исполнении, например в форме значка (пуговицы, брелка и т.д.), размещаемого па объекте 4 видеосъемки. Вращение сканера 2.1 ИК-детектора движения 2 осуществляют приводом 5 угла поворота фазы φ, который расположен соосно со сканером 2.1 ИК-детектора движения 2 и видеокамерой 1. Привод 5 с ИК-детектором движения 2 размещены между подвижной и неподвижной секторно-кольцевыми структурами сканера 2.1. При этом исполнительный механизм 5.1 привода 5 закреплен на неподвижном кольце сканера 2.1 в центре секторно-кольцевой структуры для организации вращения в азимутальной плоскости подвижной секторно-кольцевой структуры, по периметру кольца которой в секторах расположены приемники ИК-излучения Dj, D-j ИК-детектора движения 2 (см. фиг.1, d).
Структурная схема привода 5 с ИК-детектором движения 2 и устройством сопряжения 3 приведена на фиг.2. Схема включает последовательное соединение ИК-детектора движения 2, устройства 3 сопряжения из цифро-аналогового преобразователя 3.1 и усилителя мощности 3.2, и исполнительного механизма 5.1 вращения сканера 2.1 с ИК-детектором движения 2 в азимутальной плоскости. Структурная схема привода 5 с ИК-детектором движения 2 функционирует по следящей обратной связи отслеживая перемещение объекта 4 видеосъемки в азимутальной плоскости по многофазному углу поворота за счет излучения светодиода D ИК-генератора 4.1 излучения.
В исходном состоянии (см. фиг.1) объектив камеры 1.1 расположен по оси, перпендикулярной объекту 4 за счет приема ИК-излучения ИК-детектором движения 2 от ИК-генератора 4.1 излучения, закрепленного на объекте 4 видеонаблюдения. При перемещении объекта 4 вправо (или влево) на угол φ=iφ0 в ИК-детекторе движения 2 формируется код N, пропорциональный i-му сектору многофазного угла φ сканера с секторно-кольцевой структурой. Код N формирует на выходе ЦАП 3.1 ток I по линейному закону, который прямопропорционально преобразуется в мощность Р усилителя мощности 3.2 для включения исполнительного механизма 5.1 привода 5. Исполнительный механизм привода 5.1 поворачивает на угол φ сканер 2.1 за счет последовательного включения i сегментов методом последовательного приближения. В результате сканирования на угол φ объектив камеры 1 вновь расположен на оси, перпендикулярной объекту 4 видеосъемки. При дальнейшем перемещении объекта 4 структурная схема привода 5 с ИК-детектором движения 2 функционирует аналогично, фиксируя в коде N многофазный угол поворота φ.
Сканирование в азимутальной плоскости угла поворота фазы φi тактовыми импульсами фиксированной частоты F0 организуют (см. фиг.1) в коде N последовательным приближением нормированного значения N0j к измеряемому значению Nj за счет алгебраического суммирования реверсивных приращений ΔNj=Nj-N0j фазы Δφj, регистрируемых в виде разницы ΔNj между измеряемым Nj и нормированным N0j значениями. Сумма реверсных значений N в соответствии с алгоритмом 1, b может быть представлена как

Учитывая, что код N=F0t, т.е. произведение тактовой частоты F0 на время t, связанное с фиксированными интервалами Т0 числом j импульсов, находим для последовательного приближения (фиг.1) ΔNj=N0. Это следует из условий приближения, т.к.
Nj=F0tj=F0T0j=N0j,
N0j=F0tj+1=F0T0(j-1)=N0(j-1),
поэтому разница ΔNj равна
ΔNj=Nj-N0j=N0(j-j+1)=N0.
Соответственно, сумма приращений равна

т.е. пропорциональна числу i импульсов. График на фиг.1, а иллюстрирует изменение кода на интервалах tj приращения 
 т.к. 5-0=5;
т.к. 5-0=5;
и реверса с 5 до -5, для  :
:
 ,
,
причем итоговая сумма N-5 равна их разнице
N-5=N5+N10=5N0-10N0=-5N0.
Максимальный код Nm определяется суммой -m i-х сегментов  кольцевого сканера 2.1 с круговым углом φ2π=2π=360° обзора
кольцевого сканера 2.1 с круговым углом φ2π=2π=360° обзора

из m многофазных углов поворота с нормированной фазой φ0=φ2π/2m=φπ/m.
Кольцо кругового сканера 2.1 (см. фиг.1, d) разделено пополам на фазы сегментов φ правого φ+ и левого φ- поворота с возможностью вращения видеокамеры 1 в азимутальной плоскости по i-фазному углу поворота φ=iφ0 видеоизображения, поэтому коды N и Nm пропорциональны числу сегментов фаз, соответственно i и m:

Из этих соотношений следуют зависимости N(φ) и N(i):

показывающие прямую зависимость кода N от угла поворота (фазы) φ и числа i сегментов.
Структурная схема ИК-детектора движения (ДД) 2 (фиг.1, с) поясняет способ видеонаблюдения. ДД 2 многофазного угла φ поворота служит ИК-фотодиодная матрица из 2m+1 фотодиодов Dj и D-j,  . Диоды Dj организуют правый поворот, D-j - левый, a D0 фиксирует установившееся значение, принимаемое за нулевое. При этом в азимутальной плоскости угол поворота фазы равен нулю φ=iφ0=φ0, а ось вращения через фотодиод D0 соосна с окуляром видеокамеры 1. Соответственно, ось перпендикулярна ИК-светодиоду ИК-генератора 4.1 излучения, закрепленному на объекте 4, а также наблюдаемому объекту 4 видеосъемки. Поэтому выход ИК-фотодиода D0 связан с нулевым входом R (reset) счетчика 2.2. Его реверсивные входы суммы «+» и вычитания «-» тактовых импульсов частоты F0 объединены каждый с m фотодиодами Dj и D-j ИК-матрицы сканера 2.1 для регистрации многофазных углов φ правого или левого поворота объекта 4 видеосъемки.
. Диоды Dj организуют правый поворот, D-j - левый, a D0 фиксирует установившееся значение, принимаемое за нулевое. При этом в азимутальной плоскости угол поворота фазы равен нулю φ=iφ0=φ0, а ось вращения через фотодиод D0 соосна с окуляром видеокамеры 1. Соответственно, ось перпендикулярна ИК-светодиоду ИК-генератора 4.1 излучения, закрепленному на объекте 4, а также наблюдаемому объекту 4 видеосъемки. Поэтому выход ИК-фотодиода D0 связан с нулевым входом R (reset) счетчика 2.2. Его реверсивные входы суммы «+» и вычитания «-» тактовых импульсов частоты F0 объединены каждый с m фотодиодами Dj и D-j ИК-матрицы сканера 2.1 для регистрации многофазных углов φ правого или левого поворота объекта 4 видеосъемки.
В исходном состоянии (см. фиг.1, а) объект 4 находится перпендикулярно оси видеосъемки видеокамеры 1, при этом счетчик 2.2 обнулен, т.к. от ИК-светодиода D ИК-генератора 4.1 излучения, расположенного на объекте 4 видеонаблюдения, лучи воздействуют на нулевой D0 фотодиод. В исходном состоянии код N счетчика 2.2 равен нулю. При повороте объекта 4 вправо, например на 5 сегментов угла поворота φ=5φ0, код N=5N0, а нормированный код N0j=0N0. Лучи от ИК-светодиода D ИК-генератора 4.1 излучения объекта 4 регистрируются D5 фотодиодом, что увеличивает суммарный код счетчика 2.2 в течении j тактов импульсами F0. За счет последовательного приближения нормируемого кода N0j к текущему Nj сканер (см. фиг.1, d) вращается вправо от j=5-го сегмента к нулевому, а код в счетчике 2.2 увеличивается
 .
.
Когда нулевой сегмент с фотодиодом D0 окажется в азимутальной плоскости на оси, перпендикулярной ИК-светодиоду D ИК-генератора 4.1 излучения, счетчик 2.2 останавливается, а объект 4 видеосъемки вновь оказывается перед объективом видеокамеры 1 на оси, перпендикулярной видеосъемке. Аналогично ИК-детектор движения 2 отслеживает левый поворот за счет включения D-j фотодиодов и вычитания j-х импульсов F0 из счетчика 2.2. На выходе счетчика 2.2 ДД 2 регистрируется код N, пропорциональный интегралу (1) приращений ΔNj кода, соответствующих линейному преобразованию фазы φ=iφ0 (или числу i сегментов) в код по характеристикам (5).
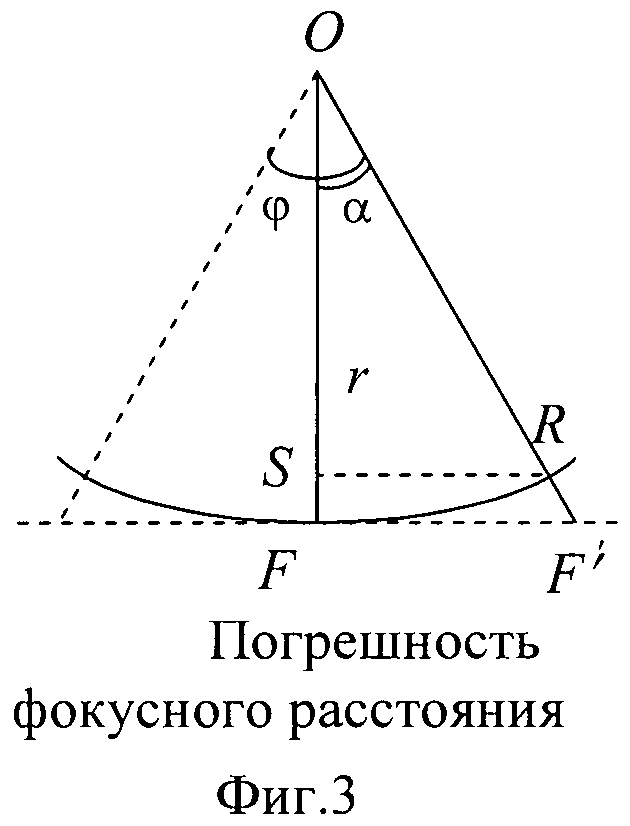
Оценим метрологическую эффективность предлагаемого решения относительно прототипа, обусловленную автоматизацией кругового панорамного обзора с регламентированной точностью (четкостью) нормируемой меры фазы угла поворота. Четкость видеоизображения определяется погрешностью 6 фокусного расстояния, зависящей от фазы угла поворота. Фокусное расстояние (см. фиг.3) от центра О объектива до объекта F равно кратчайшему расстоянию OF окружности радиусом r для объекта, находящегося в фокусе видеосъемки. При перемещении объекта по окружности радиусом r вправо (или влево) на угол α, равный половине фазы угла поворота φ/2, его эффективное фокусное расстояние уменьшается с радиуса r до проекции OS на ось OF. Погрешность ε изменения фокусного расстояния определяется относительным изменением Δ радиуса r до проекции OS к нормированному фокусу r окружности
ε=Δ/r=1-OS/r.
Отношение OS/r несложно найти из треугольника SOR
OS/r=cosα,
где α=φ/2 - угол половины фазы угла φ поворота в азимутальной плоскости перемещения объекта видеонаблюдения.
За нормированную фазу φ0 целесообразно принять угловую меру, регламентированную погрешностью ε фокусного расстояния, например 1%, т.е. ε=0,01 или φ0=φ(ε=0,01). Нормированную фазу φ0 также можно определить из половины окружности с углом φü=π=180°, разделенным на максимальное число m сегментов
φ0=φm/2=π/2m.
Для многофазного угла поворота φ=iφ0 из i сегментов, где  , погрешность фокусного расстояния оценивается зависимостью
, погрешность фокусного расстояния оценивается зависимостью
ε=1-cos(iπ/2m).
Оценка погрешности ε(φ) с нормированной мерой фазы φ/2=8° для сегментов при m=11 сведена в таблицу.
Анализ характеристики ε(φ) показывает увеличение погрешности от числа i сегментов многофазного φ=iφ0 угла поворота с одного процента для длиннофокусного объектива видеокамеры с нормированной фазой φ0=16° до 4,0-8,7% для стандартных объективов с углом 32-48°, а для широкофокусных объективов с углом 64-80° до погрешности 15-23,4%. Начиная с i=8 сегментов для φ=128° погрешность расфокусировки превышает 50% и стремится к 100% (неопределенности четкости объекта видеонаблюдения) при увеличении угла до 180%, т.е. половины угла φ0/2=90°. Для прототипа даже с ультраширокоугольным глазком обзор ограничен φ=128-144°, точность снижается на два порядка при увеличении обзора до половины круга, при большем угле видеокамера не регистрирует объект из-за его отсутствия перед глазком детектора движения.
Таким образом, предлагаемые способ и устройство видеонаблюдения, в отличие от известных решений, за счет автоматизации вращения угла поворота позволяют расширить видеонаблюдение до кругового панорамного обзора с регламентируемой точностью нормируемой меры, например с погрешностью 1% для видеообъектива с углом 16°, что на два порядка повышает точность видеонаблюдения или метрологическую эффективность видеосъемки. Предлагаемые способ и устройство расширяют возможности бытовой видеотехники до профессионального уровня за счет внедрения измерительной и информационной техники в оптико-электронное приборостроение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПТИКО-ЭЛЕКТРОННОГО КРУГОВОГО ОБЗОРА | 2010 |
|
RU2425392C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2008 |
|
RU2396731C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2014 |
|
RU2559203C1 |
| ЛОКАЛЬНАЯ ПОЗИТРОННАЯ ЭМИССИОННАЯ ТОМОГРАФИЯ | 2008 |
|
RU2471204C2 |
| СИСТЕМА ОХРАНЫ И НАБЛЮДЕНИЯ | 2008 |
|
RU2399956C2 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ АТМОСФЕРЫ | 2002 |
|
RU2226269C2 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2422919C2 |
| СПОСОБ (ВАРИАНТЫ) И УСТРОЙСТВО (ВАРИАНТЫ) АВТОМАТИЗИРОВАННОГО ОБНАРУЖЕНИЯ УМЫШЛЕННЫХ ЛИБО СЛУЧАЙНЫХ НАРУШЕНИЙ ТЕХНОЛОГИЧЕСКОЙ ПРОЦЕДУРЫ ОПЕРАТОРОМ | 2004 |
|
RU2323475C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ГАММА-ИЗЛУЧЕНИЯ ПО ДВУМ КООРДИНАТАМ В ТЕЛЕСНОМ УГЛЕ 2π СТЕРАДИАН | 2014 |
|
RU2579799C1 |

Изобретение относится к видеотехнике и, в частности, к оптико-электронным приборам обнаружения движущихся объектов. Техническим результатом является повышение метрологической эффективности кругового панорамного видеонаблюдения за счет автоматизации видеонаблюдения с регламентированной точностью нормируемой меры фазы угла поворота в азимутальной плоскости. Указанный технический результат достигается тем, что предложен способ видеонаблюдения с помощью видеокамеры с видеомагнитофоном, ИК-детектора движения объекта видеонаблюдения и устройства сопряжения детектора движения и видеокамеры с видеомагнитофоном. Видеонаблюдение организуют с возможностью вращения видеокамеры в азимутальной плоскости по многофазному углу поворота видеоизображения синхронно с приемом ИК-излучения детектором движения от ИК-генератора излучения, размещаемого на объекте видеонаблюдения, за счет сканирования приводом с устройством сопряжения в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты выше 10 Гц. Сканирование угла поворота фазы организуют в коде последовательным приближением нормированного значения к измеряемому значению за счет алгебраического суммирования реверсивных приращений фазы, регистрируемых в виде разницы между измеренным и нормированным значениями. 2 н.п. ф-лы, 1 табл., 6 ил.
1. Способ видеонаблюдения, включающий видеокамеру с видеомагнитофоном, ИК-детектор движения объекта видеонаблюдения и устройство сопряжения ИК-детектора движения и видеокамеры с видеомагнитофоном, отличающийся тем, что видеонаблюдение организуют с возможностью вращения видеокамеры в азимутальной плоскости по многофазному углу поворота видеоизображения синхронно с приемом ИК-излучения ИК-детектором движения от ИК-генератора излучения, размещаемого на объекте видеонаблюдения, за счет сканирования приводом с устройством сопряжения в азимутальной плоскости соответствующего угла поворота фазы тактовыми импульсами фиксированной частоты выше 10 Гц, сканирование в азимутальной плоскости угла поворота фазы тактовыми импульсами фиксированной частоты организуют в коде последовательным приближением нормированного значения к измеряемому значению за счет алгебраического суммирования реверсивных приращений фазы, регистрируемых в виде разницы между измеренным и нормированным значениями.
2. Устройство видеонаблюдения, включающее видеокамеру с видеомагнитофоном, ИК-детектор движения объекта и устройство сопряжения, видеокамера водружена на сканер ИК-детектора движения, организующий вращение в азимутальной плоскости от ИК-генератора излучения приводом с устройством сопряжения угла поворота фазы, который расположен соосно с ИК-детектором движения между подвижной и неподвижной секторно-кольцевыми структурами сканера, отличающееся тем, что привод с ИК-детектором движения многофазного угла поворота и устройством сопряжения организован по следящей структуре из последовательного соединения ИК-детектора движения многофазного угла поворота, устройства сопряжения, включающего цифроаналоговый преобразователь и усилитель мощности, и исполнительного механизма вращения в азимутальной плоскости, ИК-генератор излучения в азимутальной плоскости выполнен на ИК-светодиоде с автономным источником питания в декоративном исполнении, например в форме значка, размещаемого на объекте съемки, ИК-детектором движения многофазного угла поворота служит ИК-фотодиодная матрица из 2m+1 фотодиодов, подключенных входами к источнику питания, а выходами - к управляющим входам реверсивного счетчика, причем центральный фотодиод матрицы соединен со входом его обнуления, первые m фотодиоды объединены с суммирующим, а вторые m фотодиоды - с вычитающими входами реверса счетчика, счетный вход которого является синхронизирующим входом тактовой частоты более 10 Гц, а его выходы организуют разряды кода ИК-детектора движения многофазного угла поворота соответственно разрядности 2m+1 фотодиодам матрицы.
| US 2006197840 A1, 07.09.2006 | |||
| US 5668629 A, 16.09.1997 | |||
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ДИАМЕТРА ВНУТРЕННЕЙ РЕЗЬБЫ | 2010 |
|
RU2440553C2 |
| US 7525567 B2, 28.04.2009 | |||
| US 6774369 A1, 10.08.2004 | |||
| JP 6292059 A, 18.10.1994 | |||
| WO 2008115416 A1, 25.09.2008 | |||
| US 2007285562 A1, 13.12.2007 | |||
| US 5299971 A, 29.11.1988 | |||
| US 2006187305 A1, 24.08.2006 | |||
| US 5548409 A, 20.08.1996 | |||
| WO 2009061170 A2, 14.05.2009 | |||
| CN 101378501 A, | |||

