ON
fcb
00 ND
&
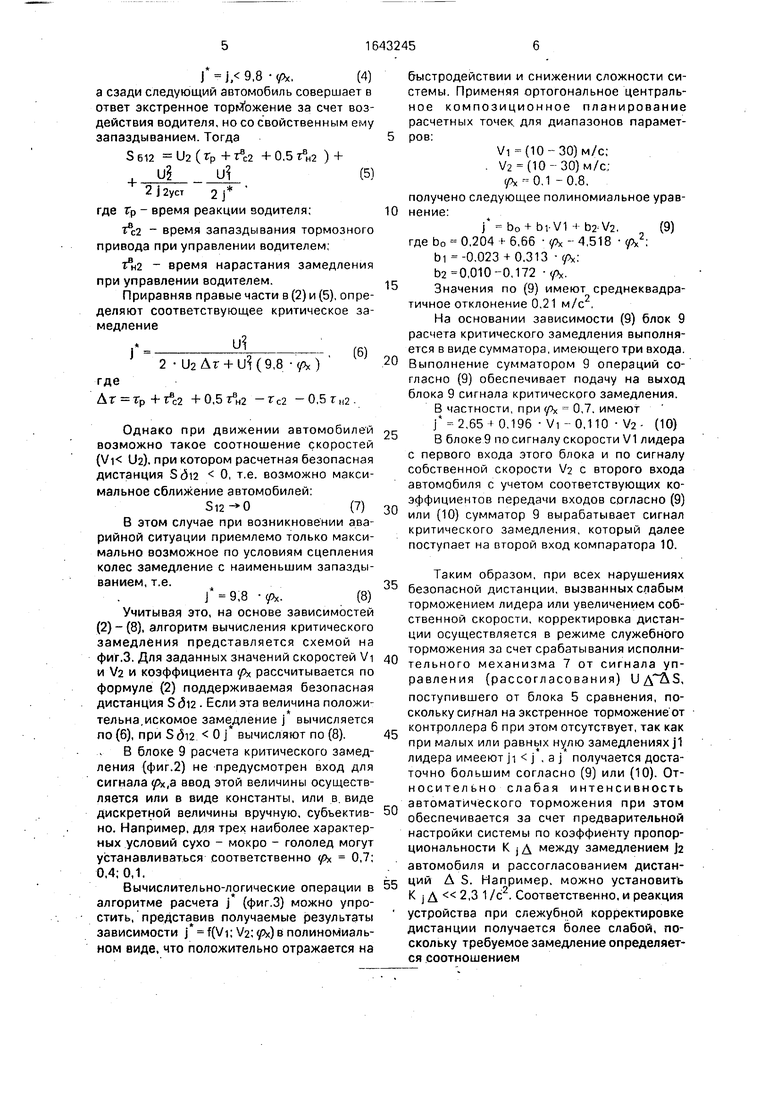
Изобретение относится к автомобильной технике, а именно к системам автоматического управления автомобилем, использующим локационные датчики. Цель изобретения - повышение безопасности движения. Устройство содержит локационный датчик 1 относительной скорости расстояния до впереди идущего автомобиля, датчик 2 собственной скорости автомобиля, блок 3 определения скорости впереди идущего автомобиля, блок 4 расчета безопасной дистанции, блок 5 сравнения и исполнительный механизм 7 замедления Кроме того, в устройство включен контроллер 6 экстренного режима впереди идущего автомобиля Первый вход контроллера связан с выходом блока 3 второй - с выходом датчика 2, выход подключен к исполнительному механизму 7 Контроллер 6 сравнивает действительное и критическое замедления впереди идущего автомобиля и при превышении первым второго включает механизм 7 в режиме экстренного торможения 2 з.п ф-лы, 4 ил. СП с
фиг.1
Изобретение относится к автомобильной технике, а именно к системам автоматического управления автомобилем, использующим локационные датчики.
Целью изобретения является повышение безопасности движения.
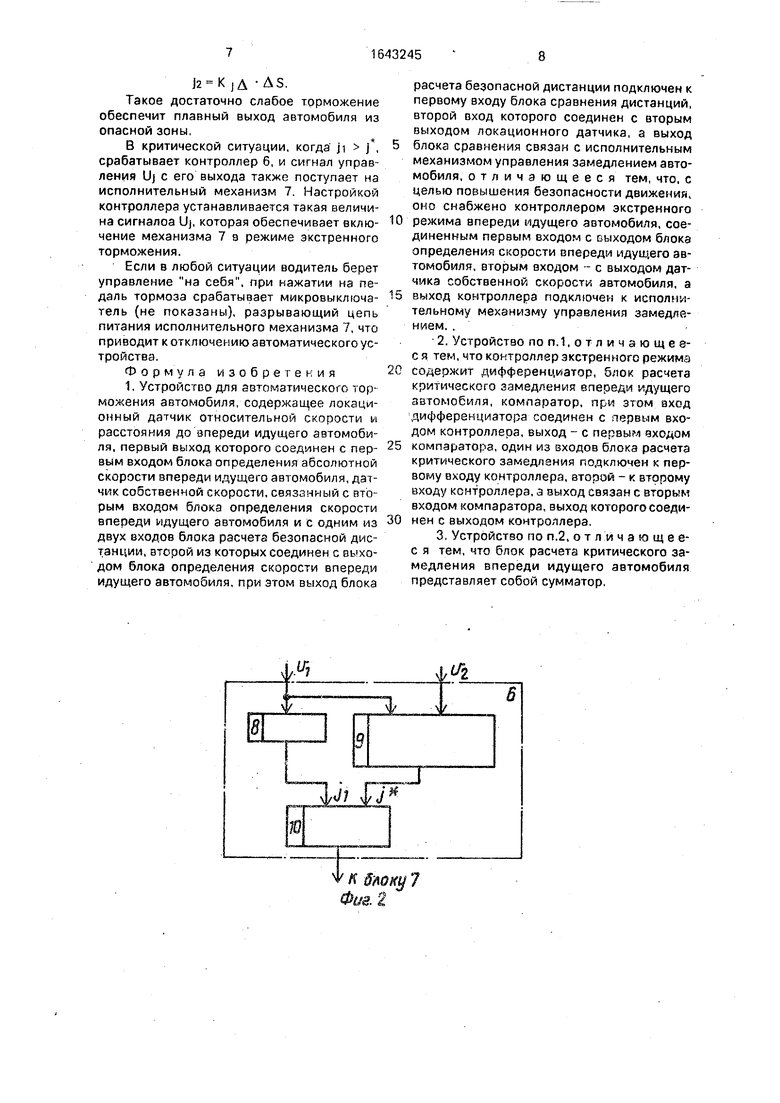
На фиг.1 представлена общая схема устройства для автоматического торможения автомобиля; на фиг.2 - схема контроллера экстренного режима; на фиг.З - алгоритм вычисления критического замедления впереди идущего автомобиля; на фиг.4 - блок расчета критического замедления.
Устройство для автоматического торможения (фиг.1) содержит локационный датчик 1 относительной скорости Vi2 и до расстояния Si2 впереди идущего автомобиля и датчик 2 собственной скорости V2 автомобиля. Выход относительной скорости Via датчика 1 и выход датчика 2 собственной скорости Va подключены к входам блока 3 определения абсолютной скорости Vi впереди идущего автомобиля, выход которого связан с одним входом блока 4 расчета безопасной дистанции Зб12 до него, к второму входу которого подсоединен выход датчика 2. Выходы расстояния Sia датчика 1 и блока 4 расчета безопасной дистанции Зб12 подключены к первому и второму входам блока 5 сравнения. Выходы датчика 2 собственной скорости V2 автомобиля и блока 3 определения абсолютной скорости Л впереди идущего автомобиля связаны с первым и вторым входами контроллера 6 экстренного режима впереди идущего автомобиля. Выходы блока 5 сравнения и контроллера б экстренного режима связаны с входом управления исполнительного механизма 7. Блок 3 представляет собой сумматор,
Контроллер 6 экстренного режима впереди идущего автомобиля содержит дифференциатор 8 (фиг.2), блок 9 расчета критического замедления j и компаратор 10, Вход дифференциатора 8 образует первый вход контроллера 6, а первый и второй входы контроллера б образуют соответствующие входы блока 9.
Дифференциатор 8 рассчитывает текущее замедление j1 впереди идущего автомобиля. Выходы дифференциатора 8 и блока 9 расчета критического замедления j подключены соответственно к первому и второму входам компаратора 10, выход которого образует выход контроллера 6.
Для выполнения в виде сумматора блока 9 рас.чета критического замедления j (фиг.4) последний помимо двух основных входов для переменных сигналов скоро- стекй Vi и Va имеет третий вход, на который
и
подается постоянный сигнал, соответствующий коэффициенту Ь0.
Устройство работает следующим образом.
5В блоке 3 сигналом относительной скорости Via с локатора и собственной скорости Va с датчика 2 рассчивается скорость лидера Vi:
Vi Via + V2.(1)
10 По величинам Vi и Va в блоке 4 определяется безопасная дистанция:
5б12 Ua(Tc2 +0,5тн2 ) + , А(Л(2)
2 j 2уст 2 j tycr
где ГС2 игН2 - времена запаздывания исполнительного механизма замедления и на- раста ния замедления управляемого автомобиля соответственно;
jiyci и 2уст - установившееся замедление первого и второго автомобилей, определяемые по условиям сцепления колес с дорогой1
15
20
j.ycT 9,8 чр м/с .(3)
где - коэффициент сцепления
Сравнение дистанций Sia и S дп происходит в блоке 5 путем подачи их сигналов на разнополярные входы сумматора и определения рассогласования:
AS .
При A S О срабатывает тормозной привод, благодаря чему выполняется корректировка дистанции путем служебного торможения. Сигнал управления исполнительным механизмом 7 замедления, соответствующий по величине режиму экстренного торможения, появляется на выходе компаратора 10, являющемся и выходом контроллера 6 лишь тогда, когда
интенсивное замедление впереди идущего автомобиля может вызвать аварийную ситуацию, т.е.. при ji j . Если же ji J. экстренное автома пческое торможение не осуществляется, поскольку по условиямопределения критического замедления / в этой ситуации водитель сам успеет экстренно среагировать и затормозить автомобиль. Предпочтение водителю, в этом случае, отдается потому, что процесс управления автомобилем не ограничивается только торможением: необходимо обеспечивать устойчивость автомобиля, управлять направлением движения и т.д.
Критическое замедление j определяется из следующих соображений. Поддерживаемая безопасная дистанция, определяемая по (2) с предположением (3). является также безопасной и в том случае когда впереди идущий автомобиль выполняет торможение с замедлением
j J.9.8 .(4)
а сзади следующий автомобиль совершает в ответ экстренное торможение за счет воздействия водителя, но со свойственным ему запаздыванием. Тогда
S U2 (гр + 0,5 ) +
+ (5)
2J2ycr 2 j
где гр - время реакции водителя;
время запаздывания тормозного привода при управлении водителем,
- время нарастания замедления при управлении водителем.
Приравняв правые части в (2) и (5), определяют соответствующее критическое замедление
tf
j
2 U2 Дг + 112(9,8 -px)
(6)
где
Дг Тр+твс2 + 0,5тв„2 -гс2 -0,5 г„2
Однако при движении автомобилей возможно такое соотношение скоростей (Vi 1)2). при котором расчетная безопасная дистанция Sdia 0, т.е. возможно максимальное сближение автомобилей:
(7)
В этом случае при возникновении аварийной ситуации приемлемо только максимально возможное по условиям сцепления колес замедление с наименьшим запаздыванием, т.е.
J 9,8 рх.(8)
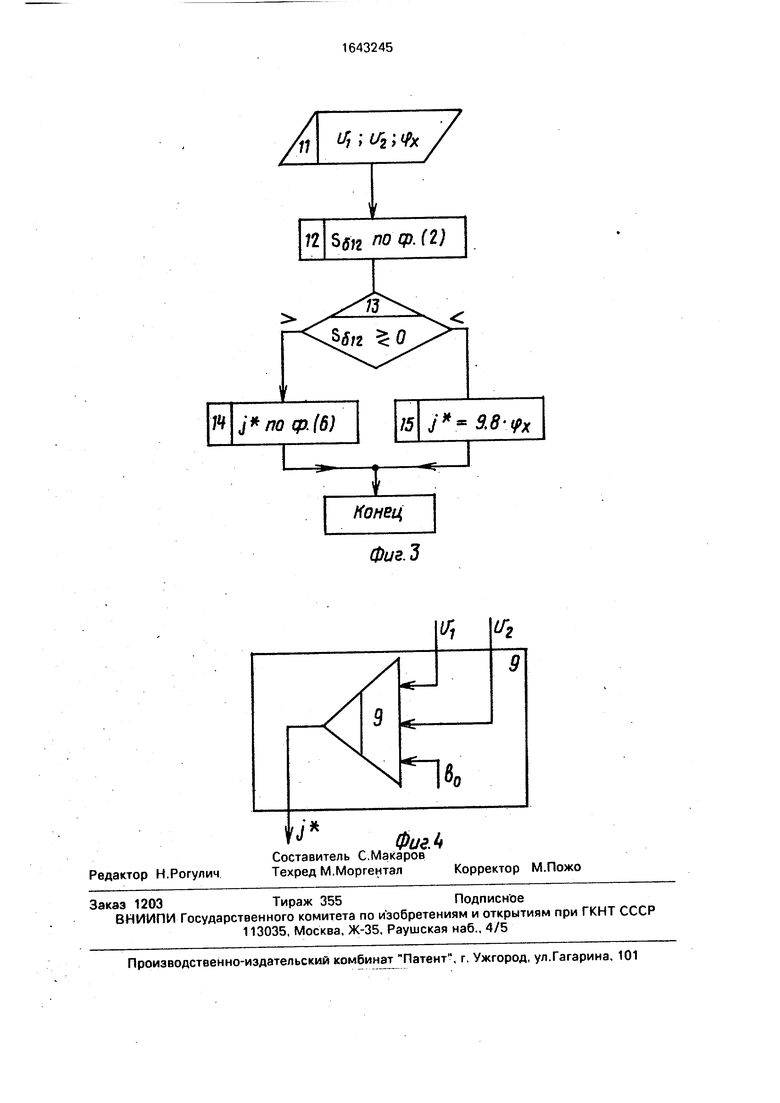
Учитывая это, на основе зависимостей (2) - (8), алгоритм вычисления критического замедления представляется схемой на фиг.З. Для заданных значений скоростей Vi и V2 и коэффициента х рассчитывается по формуле (2) поддерживаемая безопасная дистанция S 5i2 . Если эта величина положительна,искомое замедление j вычисляется по (6), при S 5i2 0 j вычисляют по (8).
В блоке 9 расчета критического замедления (фиг.2) не предусмотрен вход для сигнала /,а ввод этой величины осуществляется или в виде константы, или в виде дискретной величины вручную, субъективно. Например, для трех наиболее характерных условий сухо - мокро - гололед могут устанавливаться соответственно р 0,7; 0,4; 0,1.
Вычислительно-логические операции в алгоритме расчета j (фиг.З) можно упростить, представив получаемые результаты зависимости j f(Vi;V2;yv) в полиномиальном виде, что положительно отражается на
25
45
50
быстродействии и снижении сложности системы. Применяя ортогональное центральное композиционное планирование расчетных точек для диапазонов парамет- 5 ров.
Vi (10-30) м/с; V2 (10- 30) м/с х -0.1 -0.8,
получено следующее полиномиальное урав- 10 нение
j b0 + bi V1 02 V2,(9)
где bo 0,204 ь 6,66 fr - 4,518 f bi -0.023 + 0,313 - tfr; b2 0,010-0.172 -(b.
5Значения по (9) имеют среднеквадратичное отклонение 0,21 м/с2,
На основании зависимости (9) блок 9 расчета критического замедления выполняется в виде сумматора .имеющего три входа. 20 Выполнение сумматором 9 операций согласно (9) обеспечивает подачу на выход блока 9 сигнала критического замедления. В частности, при f 0,7. имеют ,65 + 0,196 Vi - 0,110 V2- (10) В блоке 9 по сигналу скорости V1 лидера с первого входа этого блока и по сигналу собственной скорости V2 с второго входа автомобиля с учетом соответствующих коэффициентов передачи входов согласно (9) 30 Или (10) сумматор 9 вырабатывает сигнал критического замедления, который далее поступает на второй вход компаратора 10.
Таким образом, при всех нарушениях 35 безопасной дистанции, вызванных слабым торможением лидера или увеличением собственной скорости, корректировка дистанции осуществляется в режиме служебного торможения за счет срабатывания исполни- 40 тельного механизма 7 от сигнала управления (рассогласования) , поступившего от блока 5 сравнения, поскольку сигнал на экстренное торможение от контроллера 6 при этом отсутствует, так как при малых или равных нулю замедлениях J1 лидера имееют ji j, a j получается достаточно большим согласно (9) или (10). Относительно слабая интенсивность автоматического торможения при этом обеспечивается за счет предварительной настройки системы по коэффиенту пропорциональности К , д между замедлением J2 автомобиля и рассогласованием дистан- 55 ций A S. Например, можно установить К j д « 2,3 1 /с2. Соответственно, и реакция устройства при слежубной корректировке дистанции получается более слабой, поскольку требуемое замедление определяется соотношением
J2 K Д -AS.
Такое достаточно слабое торможение обеспечит плавный выход автомобиля из опасной зоны,
В критической ситуации, когда ji j, срабатывает контроллер 6, и сигнал управления Uj с его выхода также поступает на исполнительный механизм 7. Настройкой контроллера устанавливается такая величина сигналов Uj, которая обеспечивает включение механизма 7 в режиме экстренного торможения.
Если в любой ситуации водитель берет управление на себя, при нажатии на педаль тормоза срабатывает микровыключатель (не показаны), разрывающий цепь питания исполнительного механизма 7, что приводит к отключению автоматического устройства.
Формула изобретения
1, Устройство для автоматического торможения автомобиля, содержащее локационный датчик относительной скорости и расстояния до впереди идущего автомобиля, первый выход которого соединен с первым входом блока определения абсолютной скорости впереди идущего автомобиля, датчик собственной скорости, связанный с вторым входом блока определения скорости впереди идущего автомобиля и с одним из двух входов блока расчета безопасной дистанции, второй из которых соединен с выходом блока определения скорости впереди идущего автомобиля, при этом выход блока
расчета безопасной дистанции подключен к первому входу блока сравнения дистанций, второй вход которого соединен с вторым выходом локационного датчика, а выход
блока сравнения связан с исполнительным механизмом управления замедлением автомобиля, отличающееся тем, что, с целью повышения безопасности движения, оно снабжено контроллером экстренного
режима впереди идущего автомобиля, соединенным первым входом с выходом блока определения скорости впереди идущего автомобиля, вторым входом - с выходом датчика собственной скорости автомобиля, а
выход контроллера подключен к исполнительному механизму управления замедлением. .
содержит дифференциатор, блок расчета критического замедления впереди идущего автомобиля, компаратор, при зтом вход дифференциатора соединен с первым входом контроллера, выход - с первым входом
компаратора, один из входов блока расчета критического замедления подключен к первому входу контроллера, второй - к второму входу контроллера, а выход связан с вторым входом компаратора, выход которого соединен с выходом контроллера.
3,Устройство по п.2, отличающее- с я тем, что блок расчета критического замедления впереди идущего автомобиля представляет собой сумматор,
п
Sffjg по Р- W
ф.№
tn
.
Конец
Фиг. Ъ
V,
tf,
| Патент США № 4505351 | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
