Изобретение относится к транспортному машиностроению и может быть использовано, главным образом, в качестве датчика системы предупреждения столкновения автомобиля при движении в транспортном потоке или системы управления движением колонны, для повышения эффективности действия процесса торможения автомобиля, снабженного, например, антиблокировочной системой и в других случаях. Известно устройство [Патент РФ №2161814 С1, МПК G05D 1/02, В60К 31/00, G08G 1/16, 2001], содержащее устройства слежения за впереди едущим транспортным средством, оснащенные, например, устройствами воздействия на тормозную систему автомобиля. Недостаток подобных устройств очевиден - при ложном срабатывании возможно возникновение аварийной ситуации.
Наиболее близкой к предлагаемому решения является система предотвращения столкновений транспортных средств в колонне [Патент РФ №2292564 С2, МПК G01S 13/93, 2006], содержащая антенну, модулятор, первый усилитель мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности и вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, второй усилитель мощности, сумматор, циркулятор и фильтр доплеровских частот, причем выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен со вторым входом циркулятора, первый вход которого соединен с антенной, а выход - со вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, второй выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом схемы управления положением антенны, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом первой исполнительной схемы, выход которой соединен с источником звука, а третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой. Недостаток подобных устройств очевиден - эффективность торможения двигательно-тормозной системы (вспомогательной тормозной системы) мала. Недостатком подобных систем кроме этого является то, что датчик отслеживает взаимное положение между ближайшими объектами колонны, что не позволяет рационально реагировать на изменение режима движения другими объектами колонны и не позволяет «лидеру» колонны контролировать состояние других объектов колонны, что затрудняет принятие рационального решения по скоростному режиму движения колонны в целом.
Техническая задача направлена на повышение эффективности регулирования скоростного режима объектов транспортного потока путем интегрирования с антиблокировочной системы рабочих тормозов и введения канала обмена параметрами между объектами колонны.
Технический результат достигается тем, что система содержит антенну, модулятор, первый усилитель мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности и вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, второй усилитель мощности, сумматор, циркулятор и фильтр доплеровских частот, причем выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен с вторым входом циркулятора, первый вход которого соединен с антенной, а выход - с вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, второй выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом схемы управления положением антенны, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом первой исполнительной схемы, выход которой соединен с источником звука, а третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой, в систему дополнительно введены третья управляющая схема, соединенная с шестым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, а выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, антенна обмена данными между объектами колонны, которая через выход вновь введенного второго циркулятора соединена с выходом второго модулятора, а вход модулятора соединен с пятым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, сравнитель, который соединен с выходом второго циркулятора и четвертым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, четвертая исполнительная схема связанная с выходом сравнителя, а выход четвертой исполнительной схемы связан со вновь введенной световой сигнализацией. Отличительным признаком от прототипа является то, что дополнительно введены третья управляющая схема, соединенная с шестым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, а выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, антенна обмена данными между объектами колонны, которая через выход вновь введенного второго циркулятора соединена с выходом второго модулятора, а вход модулятора соединен с пятым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, сравнитель, который соединен с выходом второго циркулятора и четвертым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, четвертая исполнительная схема, связанная с выходом сравнителя, а выход четвертой исполнительной схемы связан со вновь введенной световой сигнализацией.
Сопоставительный анализ заявляемого способа с имеющимися техническими решениями показывает, что он обладает рядом существенных отличий: повышение эффективности регулирования скоростного режима объектов транспортного потока путем интегрирования с антиблокировочной системы рабочих тормозов, а также введение канала обмена параметрами между объектами колонны.
На чертеже (фиг.1) представлена функциональная схема системы, реализующей способ обеспечения активной безопасности транспортных средств при движении в колонне.
Система предотвращения столкновений транспортных средств содержит: генератор непрерывных колебаний 1, модулятор 2, первый усилитель мощности 3, сумматор 4, циркулятор 5, антенну 6, смеситель 7, преобразователь частоты 8, детектор 9, регистратор дальности 10, первый регистратор скорости 11, второй усилитель мощности 12, фильтр доплеровских частот 13, второй регистратор скорости 14, вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15, схема 18 управления положением антенны, первая 16 и вторая 17, третья 19 и четвертая 22 исполнительная схемы, модулятор 20 и циркулятор 21 антенны 23 обмена данными между объектами колонны, сравнитель 24.
Выход генератора 1 непрерывных колебаний соединен с входом модулятора 2, первым входом смесителя 7 и входом второго усилителя мощности 12, выход которого соединен с первым входом сумматора 4, второй вход которого соединен с выходом первого усилителя мощности 3, вход которого соединен с выходом модулятора 2, выход сумматора 4 соединен со вторым входом циркулятора 5, первый вход которого соединен с антенной 6, а выход - со вторым входом смесителя 7, выход которого соединен с входами преобразователя частоты 8 и фильтра доплеровских частот 13, выход которого соединен с входом второго регистратора скорости 14, выход которого соединен с первым входом вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты 8 через детектор соединен с первыми входами регистратора 10 дальности и первого регистратора скорости 11, выход модулятора 2 соединен с вторыми входами первого регистратора скорости 11 и регистратора 10 дальности, выход которого соединен с вторым входом вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости 11 соединен с третьим входом вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, вход схемы 18 управления положением антенны связан со вторым (II) выходом вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, первый (I) выход вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения связан с первой 16 исполнительной схемой, выход которой соединен с источником звука, третий (III) - с входом второй 16 исполнительной схемы, выход которой связан с дроссельной заслонкой, четвертый (IV) - с первым входом сравнителя 24, второй вход которого соединен с выходом циркулятора 21, а выход - с четвертой 22 исполнительной схемой, выход которой соединен со световой сигнализацией, пятый (V) выход вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения связан с модулятором 20, выход которого через сравнитель 21 связан с антенной 23 обмена данными между объектами колонны, а шестой (VI) - с третьей 19 исполнительной схемой, выход которой соединен с блоком управления АБС.
Система работает следующим образом.
Генератор непрерывных колебаний 1 формирует непрерывные колебания радиочастоты, поступающие одновременно:
- на модулятор 2, в котором формируются радиоимпульсы, усиленные в первом усилителе мощности 3, поступающие на сумматор 4, а с него через циркулятор 5 излучаются через антенну 6 в пространство;
- на первый гетеродинный вход смесителя 7, на второй вход которого поступает через антенну 6 и циркулятор 5 радиосигнал, отраженный от препятствия;
- на вход второго усилителя мощности 12, выходной радиосигнал которого через сумматор 4, циркулятор 5 и антенну 6 также излучается в пространство.
Таким образом, антенной 6 одновременно излучаются в пространство импульсный и непрерывный радиосигнал. Сигнал на выходе смесителя 7 несет информацию о дальности до препятствия и путевой скорости, если луч диаграммы направленности антенны 6 облучает препятствие, находящееся перед автомобилем, а боковой лепесток антенного луча соприкасается с земной поверхностью.
Измерение дальности до препятствия и скорости сближения с ним после смесителя 7 осуществляется преобразователем частоты 8, с выхода которого сигнал, преобразуясь в детекторе 9, поступает на первые входы регистратора дальности 10 и первого регистратора скорости 11, на вторые входы которых поступают радиоимпульсы, сформированные в модуляторе 2.
Первый регистратор скорости 11 выдает информацию на третий вход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15, в котором скорость сближения автомобиля с препятствием вычисляется как скорость изменения приращения дальности во времени dt, так что
С регистратора 10 сигнал поступает на второй вход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15.
Оценка путевой скорости осуществляется выделением сигнала, сформированного после смесителя 7, затем фильтром доплеровских частот 13 при помощи второго регистратора скорости 14.
Численно величина путевой скорости движения автомобиля Vам прямо пропорциональна доплеровской частоте Fд и при определенной длине волны радиосигнала λ, и угле α облучения антенной дорожного покрытия находится по зависимостям

откуда
Таким образом, с выхода второго регистратора скорости 14 сигнал поступает на первый вход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15, на второй его вход сигнал поступает с выхода регистратора скорости 10 и на третий его вход сигнал поступает с выхода первого регистратора скорости 11, а с выхода вычислителя 15 подается команда на исполнительную схему 16 звуковой индикации, при отсутствии реакции водителя (уменьшение подачи топлива, торможение) и уменьшении дистанции Rтек относительно постоянно высчитываемого опасного расстояния Rтор подаются последовательно команды на исполнительные схемы 17 управления дроссельной заслонкой и 19, связанной с блоком управления АБС. При этом эффективность торможения рабочей тормозной системы ограничена 30% от ее максимальной величины, что позволяет адекватно отреагировать водителю данного транспортного средства, а так же соседних по потоку транспортных средств не оборудованных подобными системами.
Вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения 15 производит вычисления и на его выходе появляется сигнал-команда при достижении опасного расстояния Rтор, т.е. между автомобилем и впереди находящимся препятствием (движущимся или неподвижным), при этом производится анализ трех текущих значений:
1) путевой скорости движения автомобиля (относительно земли) - Vам;
2) скорости сближения с препятствием Vсбл,
3) текущей дальности до препятствия Rтек.
Критические значения этих величин оцениваются при ситуациях:
1) автомобиль движется в сторону неподвижного или встречно движущегося препятствия;
2) автомобиль движется в потоке, в котором все транспортные средства движутся в одну сторону с одинаковой скоростью;
3) автомобиль движется в потоке, в котором часть транспортных средств движется в противоположную сторону.
При движении автомобиля в направлении на неподвижное препятствие или на препятствие, движущееся встречно, расчет опасного расстояния Rtop1 производится по классической формуле; опасное расстояние зависит от скорости сближения автомобиля с препятствием Vсбл, времени срабатывания тормозного привода t1, времени нарастания ускорения t2, коэффициента сцепления шин с покрытием дороги v, величины уклона дороги i, коэффициента эксплуатационных условий торможения Кэ следующим образом:

При использовании для расчетов вычислительной техники коэффициенты, характеризующие состояние тормозной системы автомобиля и дорожного покрытия, могут устанавливаться программно.
При движении автомобиля в потоке, в котором все транспортные средства движутся в одну сторону, скорость относительного сближения двух движущихся транспортных средств может быть равна нулю (Vсбл=0), но расстояние Rtop2, на котором необходимо выдать команду об опасном расстоянии, должно быть не ниже значения ΔR, которое зависит как от величин путевой скорости автомобиля Vам, так и от времени реакции водителя автомобиля tвод:

Тогда общий тормозной путь может быть найден по формуле

Следовательно, вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения 15 выдает исполнительную команду по результатам вычислений совместных величин: текущей дальности до препятствия Rтек скорости сближения с препятствием Vсбл и путевой скорости автомобиля Vам только в случае достижения критического состояния этих величин, при которых возможно опасное столкновение как с подвижным, так и неподвижным препятствием.
Схема 18 управления положением антенны позволяет изменить угол, под которым производится излучение при наличии встречно движущегося транспортного средства, снабженного устройством, подобным предложенному. Это позволяет снизить взаимные помехи, создаваемые радарами.
Для повышения активной безопасности транспортных средств при движении в колонне в системе применена антенна 23 обмена данными между объектами колонны, которая посылает закодированный радиосигнал, характеризующий состояние транспортного средства (Vам). Данные (Vам) поступают из вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15 и преобразуются в радиосигнал в модуляторе 20, поступают в виде радиосигнала, через антенну 23 обмена данными между объектами колонны, закодированные данные о состоянии других объектов колонны (Vам1…VамN) через циркулятор 21 поступают в сравнитель 24 и в случае достижения критических значений ΔVкр1, ΔVкр2 и ΔVкр3 (7) подается команда на четвертую исполнительную схему 22, связанную с пропорциональной световой сигнализацией.
Наличие канала обмена данными между объектами колонны позволяет более рационально управлять скоростным режимом колонны в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕПРАВОМЕРНЫХ ДЕЙСТВИЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613918C2 |
| АВТОНОМНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2013 |
|
RU2533659C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| СПОСОБ И УСТРОЙСТВО АВТОНОМНОЙ РАДИОЛОКАЦИОННОЙ САМОКОРРЕКЦИИ ПРОМАХА ПРИ ВСТРЕЧЕ МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ОБЪЕКТОМ НА ЗАКЛЮЧИТЕЛЬНОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА | 2012 |
|
RU2533660C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ВСТРЕЧИ АКТИВНОГО РАДИОЛОКАТОРА С СОСРЕДОТОЧЕННОЙ ВОЗДУШНОЙ ЦЕЛЬЮ | 2005 |
|
RU2292562C2 |
| Устройство обеспечения автоматизированного движения беспилотных машин в колонне | 2024 |
|
RU2836403C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
Изобретение относится к транспортной технике, в частности к системам предупреждения столкновения автомобиля при движении в транспортном потоке. Способ обеспечения активной безопасности транспортных средств при движении в колонне предусматривает наличие системы, которая содержит две антенны, два модулятора, два усилителя мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности, вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, сумматор, циркулятор, фильтр доплеровских частот, сравнитель. Система содержит схему управления положением антенны, первую исполнительную схему, выход которой соединен с источником звука, вторую исполнительную схему, выход которой связан с дроссельной заслонкой, третью исполнительную схему, выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, четвертую исполнительную схему, выход которой соединен со световой сигнализацией. Изобретение обеспечивает повышение эффективности регулирования скоростного режима объектов транспортного потока. 1 ил.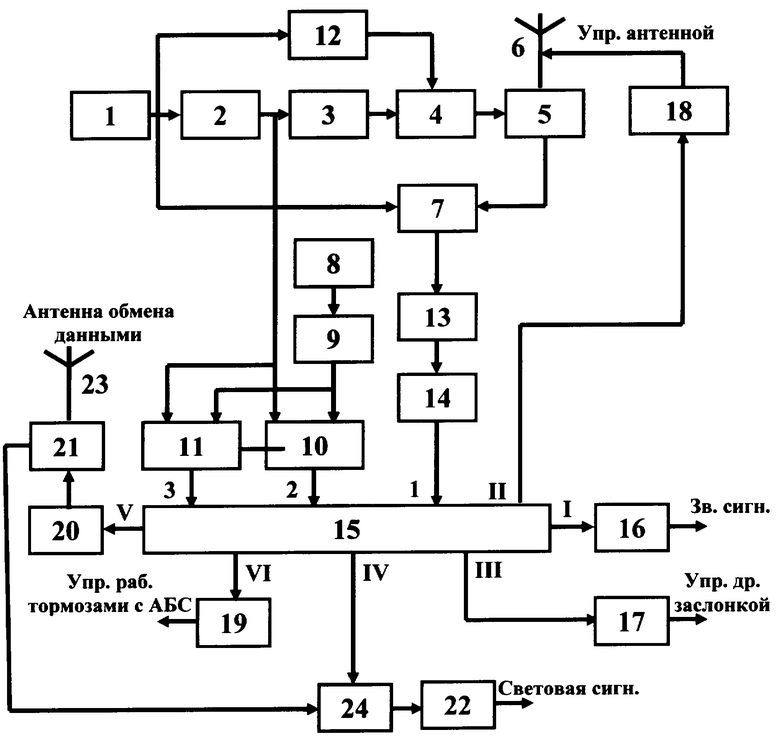
Способ обеспечения активной безопасности транспортных средств при движении в колонне предусматривает наличие системы, которая содержит антенну, модулятор, первый усилитель мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности и вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, второй усилитель мощности, сумматор, циркулятор и фильтр доплеровских частот, причем выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен с вторым входом циркулятора, первый вход которого соединен с антенной, а выход - с вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, второй выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом схемы управления положением антенны, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом первой исполнительной схемы, выход которой соединен с источником звука, а третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой, отличающийся тем, что дополнительно введены третья управляющая схема, соединенная с шестым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, а выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, антенна обмена данными между объектами колонны, которая через выход вновь введенного второго циркулятора соединена с выходом второго модулятора, а вход модулятора соединен с пятым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, сравнитель, который соединен с выходом второго циркулятора и четвертым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, четвертая исполнительная схема, связанная с выходом сравнителя, а выход четвертой исполнительной схемы связан со вновь введенной световой сигнализацией.
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| US 6259395 B1, 10.07.2001 | |||
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |

