Изобретение относится к низкочастотному складному маятнику с высоким коэффициентом механического качества и сейсмическому датчику, использующему указанный складной маятник.
Более точно изобретение относится к складному маятнику, в частности моноблочному маятнику, который благодаря его специальной структуре способен гарантировать наивысший коэффициент механического качества. Изобретение относится также к сейсмическому датчику, использующему данный маятник измерением взаимного смещения контрольного груза маятника и его основания.
Принцип, на котором базируется большинство механических устройств, применяющихся в настоящее время для измерения абсолютного горизонтального смещения, заключается в измерении относительного смещения по отношению теоретически инерционного груза и считывании данных техникой считывания разной (например, оптической или электромагнитной) природы.
Гипотетически в распоряжении был действительно инерционный груз, такой способ приводит к измерениям, ограниченным как тепловым шумом, так и шумом считывающего датчика и существующими шумами окружающей среды. Фактически действительный предел данных устройств определяется полностью качеством получения соответствующего инерционного груза.
В случае измерений горизонтальных смещений данные устройства обычно используют колеблющееся устройство, например, маятник, колеблющийся груз которого, в сущности, является инерционным грузом. Таким образом, осуществление измерения с хорошей чувствительностью на низкой частоте означает, что механическое колеблющееся устройство имеет очень низкую резонансную частоту при хорошем коэффициенте механического качества. Последнее, несомненно, является необходимым, чтобы очевидное перемещение инерционного груза не подвергалось влиянию перемещения фиксированной части механического устройства, несущего данный груз.
Например, в случае измерения сейсмических волн, теоретически, неопределенно большой коэффициент механического качества будет указывать на отсутствие сил вязкости, способных прекратить движение колеблющегося груза, обеспечивая, таким образом, точное измерение относительного смещения между инерционным грузом и Землей.
Механические устройства с очень низкой резонансной частотой имеют, между тем, в общем, очень большие размеры и их очень сложно реализовать.
Тем не менее существует конкретная конфигурация принципа, маятник Уатта (Watt pendulum, складной маятник), который очень хорошо известен из уровня техники, сочетание классического маятника и перевернутого маятника, который позволяет, наоборот, получать очень низкие частоты, удерживая в то же самое время размеры, относительно заниженные по отношению к традиционным устройствам, допуская при этом настройку резонансной частоты механического устройства, см. документ [1].
Такая конфигурация использовалась многократно для данного вида измерения, с вариантами выполнения, которые являются даже очень компактными. Проблема всех вариантов выполнения данного вида, которые широко известны из уровня техники, заключается в том, что невозможно снижение частоты ниже примерно 100 МГц как в вакууме, так и в воздухе, из-за диссимметрий устройства, соединенного способом, по которому маятник Уатта до сих пор выполнялся, и низкого коэффициента механического качества, который каждый может экспериментально получить.
Путем примера, представляя себе горизонтальный механический датчик, который выполнен с математическим маятником, резонансная частота которого равна 0,5 Гц, получим резонансную частоту данного устройства

Откуда видно, что размеры колеблющегося рычага данного маятника составляют приблизительно 1 м; если желательно иметь более низкие частоты, необходимо, таким образом, продлить размеры колеблющегося рычага, при этом для частоты 0,05 Гц размеры достигают приблизительно 100 м.
Складной маятник [1] обеспечивает резонансную частоту, теоретически равную 0 при любых малых размерах; тем не менее при практическом осуществлении имеются механические факторы, которые предполагают более низкий предел для резонансной частоты, ограничивая его, по существу, приблизительно до 70 МГц при механическом варианте выполнения, размеры которого равны 140×134×40 мм3, как широко известные из уровня техники применительно к датчикам небольших размеров, см. документы [2, 3, 4, 5, 6, 7, 8]; кроме того, в условиях окружающего давления, при минимальной резонансной частоте 70 МГц, требуется коэффициент механического качества, равный по величине приблизительно Q=10, достигая приблизительно Q=140 при величине частоты, равной 700 МГц.
С учетом его особенностей датчик данного типа может быть применен во всех приложениях, в которых необходимы измерения перемещения земли при низкой частоте, таких как, например, изготовление сейсмометров или акселерометров для анализа сейсмического риска, раннего сейсмического предупреждения и т.д., установка, как таковая, в качестве дополнительного датчика для покрытия диапазона низких частот, обеспечивающая дополнительный инструмент для исследования и расширения, в сущности, диапазона частот; учитывая, в частности, его компактные размеры, данный датчик проще при транспортировке и установке, при этом лучше монтируется на местности по сравнению с традиционными датчиками. Кроме того, его весьма ограниченный вес, менее 1 кг, позволяет применять его в качестве датчика для стабилизации колеблющихся конструкций, в особенности, сложных конструкций, например, таких как перевернутый маятник, используемый для стабилизации зеркал, составляющих интерферометры для определения гравитационных волн.
Основная схема складного маятника основана на применении математического маятника, перевернутого маятника и штанги, которая соединяет колеблющиеся концы данного маятника, см. документ [1].
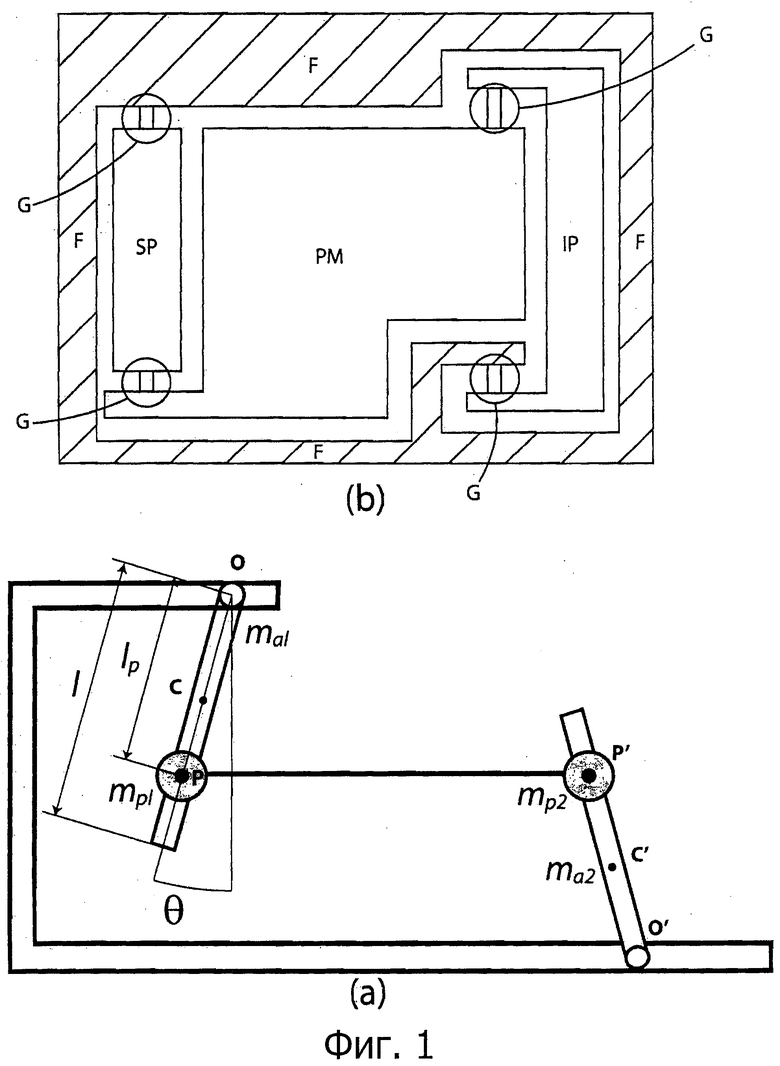
На фиг.1 представлена общая схема складного маятника, на фиг.2 представлена известная из уровня техники современная схема исполнения (по документам [2, 3, 4, 5, 6, 7, 8] углубленного исследования).
Позиция F относится к основанию или "раме", позиция PM - к контрольному грузу, позиция IP - к перевернутому маятнику и позиция SP - к математическому маятнику, G относится, между тем, к общей точке. К контрольному грузу РМ может быть также добавлена дополнительный груз CM, который не изготавливают изначально из того же самого монолитного блока, называемый калибровочным грузом, который используют для тарирования устройства по частоте (изменение естественной резонансной частоты) см. документы [2, 3, 4, 5, 6, 7, 8].
Данные позиции аналогичным образом использованы на фиг.3 и 4. Для получения устройства в собранном виде требуется четыре гибких соединения. Каждое соединение выполнено парным (в общем восемь соединений), до конца ограничивая проявления кручения и тем самым минимизируя сцепление между продольными и поперечными степенями свободы: на фиг.1 и 2 представлены виды сбоку, на которых можно видеть устройства четырех соединений (одно на каждую пару). Данные соединения соответственно соединяют:
- конец математического маятника и поддерживающую его конструкцию;
- колеблющийся конец математического маятника и конец соединяющей маятник штанги;
- другой конец соединительной штанги и колеблющийся конец перевернутого маятника;
- конец перевернутого маятника и поддерживающую складной маятник конструкцию.
К концу снижения теплового шума, в особенности при низкой частоте, см. документ [9], исполнение данного датчика представлено монолитным типом. Следовательно, соединения выполнены из того же самого материала, из которого выполнены другие части, все целиком (соединения и колеблющиеся части), изготовлено электроискровой обработкой цельного блока материала.
Поскольку устройство должно гарантировать вращение рычагов маятника, данные соединения должны быть обязательно гибкими: по этой причине они имеют весьма небольшую толщину и привносят небольшие возвратные усилия упругого вида, обусловленные деформацией вышеупомянутого соединения, вызванной колебаниями, см. документы [10, 11].
Таким образом, принимая во внимание, что резонансная частота снижается при понижении возвратного усилия соединений, которое, в свою очередь, зависит от толщины соединения, см. документ [11], представляется целесообразным выполнение соединений толщиной, которая мала, насколько это возможно.
Таким образом, согласно известным документам, данные соединения работают в качестве элементов между частями, формирующими складной маятник, и элементов подвески устройства; таким образом, соединительные части (гибкие соединения) предназначены для работы исключительно на растяжение. Варианты выполнения данных устройств могут быть такими, как предложенные Liu-Blair [1], Bertolini и др. [2] и Barone и др. [3, 4, 5, 6, 7, 8].
В частности, наилучшие результаты в отношении низкой резонансной частоты и соответствующего высокого значения коэффициента механического качества, в сочетании с ограниченным размером устройств, были получены Barone и др. [3, 4, 5, 6, 7, 8], с введением соединений эллиптического вида: данные соединения выполнены с помощью технологии электроискровой обработки, путем резания блока, из которого будет состоять устройство, образованное двумя эллипсами, имеющими эксцентриситет ε=3,2, и разнесенными друг от друга на 0,1 мм: в таком случае остается соединение, толщина которого постепенно утончается по вертикальному направлению, следуя профилю эллипса, достигая минимальной толщины 0,1 мм. Другие типы соединений кругового вида (т.е. полученные выполнением реза по периферии круга) показали явно более низкую надежность, несомненно, по причине того, что на точке изгиба соединения напряжение оказывается намного больше напряжения в случае эллипса: в любом случае, несмотря на то, что напряжение падает в пределах упругости (в материалах, подобных алюминию), продолжительное использование приводило к разрушению таких круговых соединений, возможно, из-за специфического высокого ускорения, которому было подвержено устройство; в случае эллиптического соединения, наоборот, разрушение соединения ни разу не было отмечено, даже в случаях, в которых соединение подвергалось неупругим деформациям.
Задачей данного изобретения является создание складного маятника, который решает указанные проблемы и устраняет недостатки известного уровня техники.
Другой задачей данного изобретения является создание сейсмического датчика, базирующегося на складном маятниковом объекте изобретения, который решает указанные проблемы и устраняет недостатки известного уровня техники.
Предметом данного изобретения является складной маятник, содержащий:
- основание;
- контрольный груз;
- математический маятник;
- перевернутый маятник;
причем математический маятник и перевернутый маятник соединены на одном из своих концов с контрольным грузом, а другим концом - с основанием посредством четырех соответствующих соединительных устройств, при этом контрольный груз не соединен с основанием и поэтому свободен для колебания, при этом каждое соединительное устройство, относящееся к математическому маятнику, содержит одно или более соединений в состоянии растяжения,
складной маятник характеризуется тем, что:
- каждое из соединительных устройств, относящееся к перевернутому маятнику, содержит одно или более соединений в состоянии сжатия.
Согласно изобретению складной маятник предпочтительно выполнен в виде монолитного блока из обработанного соответствующим образом материала.
Согласно изобретению монолитный блок предпочтительно вырезан машинным способом электроискровой обработкой.
Согласно изобретению упомянутое одно или более соединений предпочтительно выполнены в виде эллиптических соединений.
Согласно изобретению упомянутые соединительные устройства предпочтительно содержат два соединения, вычерченные удалением двух эллипсов с эксцентриситетом ε>3,2 и имеющие взаимное расстояние d>10 мкм .
Согласно изобретению контрольный груз предпочтительно имеет форму, которая, по существу, является параллелепидной, с центральным отверстием, предназначенным для снижения его массы.
Согласно изобретению расстояние между лицевыми сторонами контрольного груза, или основанием, и в каждом случае математического маятника или перевернутого маятника, предпочтительно равно, по меньшей мере, 250 µм.
Другим объектом данного изобретения является сейсмический датчик, содержащий:
- складной маятник, содержащий контрольный груз и основание,
- устройство для детектирования наблюдаемого смещения контрольного груза относительно основания,
и характеризующийся тем, что складной маятник представлен складным маятником, который является объектом данного изобретения.
Согласно изобретению упомянутое устройство для детектирования наблюдаемого смещения контрольного груза предпочтительно представлено оптическим устройством и содержит:
- источник света, который посылает световой луч на упомянутый контрольный груз, а именно на:
- зеркало, которое встроено в упомянутый контрольный груз (PM),
- устройство для детектирования отраженного упомянутым зеркалом света;
- электронное устройство обработки результатов для расчета упомянутого наблюдаемого смещения.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 (a) - принципиальная схема складного маятника согласно известному уровню техники;
фиг.1 (b) - схема на виде сбоку традиционного монолитного складного маятника с соединениями в состоянии растяжения (на котором видны четыре из восьми общих соединений);
фиг.2 - вид сбоку варианта выполнения традиционного монолитного складного маятника;
фиг.3 - схема на виде сбоку складного маятника согласно настоящему изобретению (показаны четыре из восьми общих соединений);
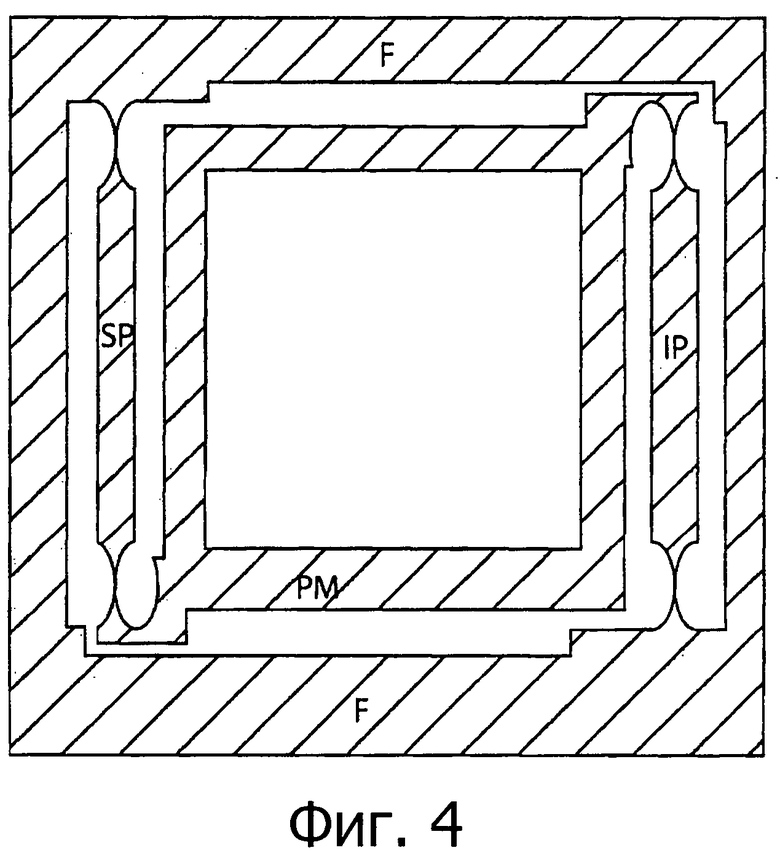
фиг.4 - предпочтительный вариант выполнения складного маятника согласно настоящему изобретению;
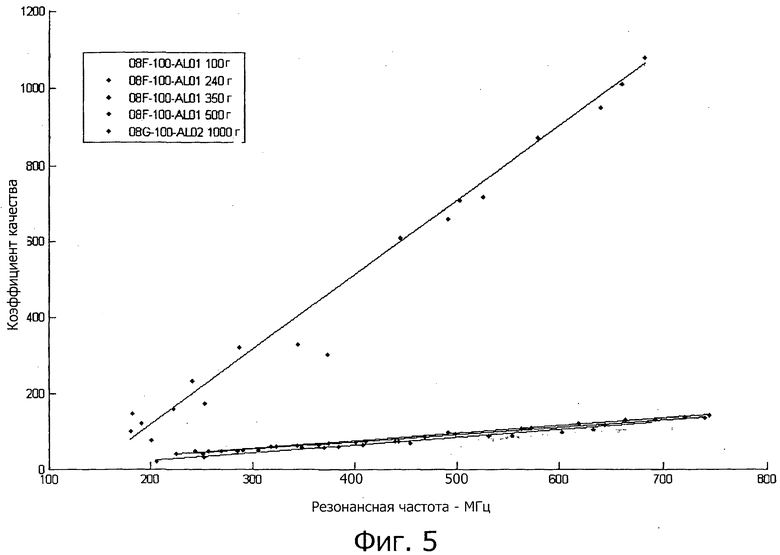
фиг.5 - сравнение между коэффициентом механического качества Q датчика согласно настоящему изобретению (08G-100-AL02, черная черта с более высокими значениями Q) в отношении датчика, описанного в уровне техники (08F-100-AL01, линии с цветной чертой), как функция резонансной частоты устройства;
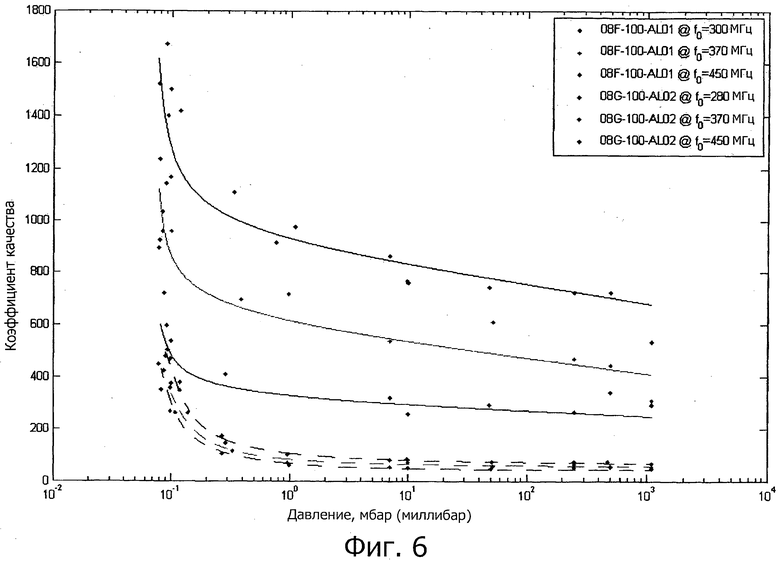
фиг.6 - сравнение между коэффициентом Q механического качества согласно настоящему изобретению (08G-100-AL02, линии с непрерывной чертой), в отношении датчика, описанного в уровне техники, как функция окружающего давления воздуха (08F-100-AL01, линии с прерывистой чертой).
Выбор использования конфигурации складного маятника определяется тем фактом, что данная система представляет собой резонансную частоту, которая теоретически равна 0.
Действительно, обратившись к фиг.1(а), осуществив соответствующие расчеты и принимая во внимание, что упругое возвратное усилие соединений равно 0, имеем, таким образом, возвратное усилие исключительно гравитационного типа, систему гравитационной частоты, что в терминах пульсов ωr=2πfr приводит к уравнению:

Из уравнения видно, что резонансная частота зависит как от геометрии системы (длина маятниковых рычагов) и распределения масс (масс рычагов и качающейся штанги). В частности, видно, что при выборе масс и длин обоих маятников равной величины числитель предыдущего выражения сводится к нулю, имея, тем самым, частоту, равную fr=0 Гц, см. документ [8].
Следует учесть, что устройство гарантирует устойчивость при соответствующем выборе масс, определяющих маятник, а также центральную штангу последнего.
Однако при практической реализации необходимо принимать во внимание тот факт, что система симметрии нарушена, и, прежде всего, дополнительным приданием упругости возвратному усилию, что добавляется деформацией соединений.
По первому положению к концу выполнения работы соединений по растяжению устройство имеет простую схему, что касается конструкции подвешивания маятника, благодаря тому, что груз данного маятника оказывается подвешенным, так же, как и соединения, связывающего данный маятник со штангой, связывающей маятник и перевернутый маятник. Наоборот, что касается подвешивания перевернутого маятника, устройство имеет достаточно сложную конфигурацию в случае, когда требуется конструкция, гарантирующая работу соединений при растяжении: вводимая инновация основана как раз на выборе применения, на перевернутом маятнике, соединениях, работающих на сжатие, пренебрегая конструктивными ограничительными связями, имеющими соединения, подверженные только растягивающему напряжению. Общая схема, показанная на фиг.3, и предпочтительный вариант выполнения на фиг.4 представляют новую предлагаемую конструкцию.
Данный выбор основан на том, что соединение эллиптического типа оказывается особенно устойчивым относительно предыдущего решения с круговыми соединениями: экспериментальная реализация явным образом показывает, что даже при наличии особенно высоких нагрузок при сжатии (в целом примерно до 1 кг, т.е. нагрузке на сжатие примерно 250 г на каждое соединение, относящееся к перевернутому маятнику), соединение не испытывает видимых напряжений, которые могут привести к его разрушению, демонстрируя обоснованность данной конструкции.
Кроме того, при следовании данной схеме конструкция окажется явно проще, с преимуществами, которые очевидны как с точки зрения низкочастотной устойчивости (около 100 МГц), так и в отношении коэффициента Q механического качества. В частности, по последнему, были выполнены разные измерения, которые были направлены на установление новой величины, как раз относительно его величин, полученных при применении предыдущих версий. Для измерения величины Q было предусмотрено применение считывающего устройства оптического типа, пригодного для измерения, с соответствующим тарированием, относительного изменения колеблющегося груза по отношению к структурному основанию, см. документ [8]. Процедура измерения величины коэффициента Q механического качества состоит в изменении, после соответствующего нивелирования складного маятника таким образом, чтобы его положение равновесия соответствовало минимальному механическому потенциалу, с колеблющимся грузом на одном конце его положения и ее освобождением: таким образом, груз пытается вернуться в свое положение равновесия, создавая колебания. Данные колебания аналитически могут быть описаны синусоидой, амплитуда которой экспоненциально уменьшается во времени (при этом устройство колебательного типа имеет коэффициент затухания ниже критического затухания). Как только величины получены в цифровом виде во времени, осуществляют подготовку для нахождения величины характерной экспоненциальной константы, которая устанавливает величину коэффициента Q механического качества. Следует учесть, что величина Q зависит от резонансной частоты механического устройства; она напоминает здесь, в частности, что повышение Q как функции частоты является линейным (монотонное повышение) при высоких величинах частоты (случай поверхностного рассеяния, т.е. для всех замеренных величин частоты) и квадратичным - при низких величинах частоты (случай внутреннего рассеяния).
Из анализа аналитического выражения резонансной частоты складного маятника видно, что частота зависит от распределения грузов, таким образом возможно осуществление настройки резонансной частоты изменением положения центра колеблющегося груза с помощью калибровочного груза; в сериях предложенных измерений положение центра массы изменялось с помощью добавления калибровочных грузов разной величины (величина данного груза изменяется примерно от 100 г до 1 кг), при этом получали разные замеры коэффициента Q в диапазоне [180, 680] МГц.
Из анализа данных видно четкое улучшение коэффициента механического качества при разных резонансных частотах устройства, что представлено на фиг.5: на данной фигуре черным цветом показано повышение коэффициента механического качества для нового устройства с соединениями в состоянии сжатия (указанные для 08G-100-AL02), нагруженного калибровочным грузом 1 кг, и другими цветами - измерения, выполненные с традиционным устройством с соединениями, при растяжении (08F-100-AL01): можно заметить, что результаты предложенного устройства имеют повышение Q по величине почти на порядок при всех замеренных частотах. Данные измерения были проведены при обычном давлении: новое устройство с соединениями в сжатом состоянии, имеющее более широкие латеральные промежутки, т.е. более широкое промежуточное пространство между колеблющейся частью и закрепленной структурой, в первый момент можно предположить, что улучшение могло зависеть от лучшего нижнего потока воздуха из промежутков во время колебания. Данный нижний поток обусловлен изменениями объема промежуточных пространств во время колебаний, но, как показано в дальнейших сериях измерений в вакууме, что представлено на фиг.6, улучшение коэффициента качества оказывается заметным также в вакууме (при величинах давления примерно 10-4 бар), при этом установлено, что улучшение обусловлено конкретной инновационной конструкцией, а не только улучшенным нижним потоком воздуха.
Кроме того, к концу оценки механических качеств и выбору характеристик, в зависимости от назначения, были выполнены испытания на эллиптических соединениях. В известном документе [4] приводится пример роста механических характеристик соединения в зависимости от эллиптичности для толщины соединения, равной 0,1 мм.
На основе приведенных выше замечаний может быть осуществлена калибровка соединений по частоте как воздействием на толщину соединений (на стадии реализации устройства), так и на калибровочный груз (стадия установки). В частности, изменение толщины соединений к концу калибровки устройства по частоте позволяет снизить ее резонансную частоту без изменения основной конструкции. Важность данного подхода очевидна, если принять во внимание, что при низких резонансных частотах механическая симметрия устройства становится одним из технических условий проекта, которые являются фундаментальными для механической устойчивости того же самого устройства. Таким образом, снижение резонансной частоты устройства путем снижения механической толщины соединений, без изменения симметрии устройства, обеспечивает механическую устойчивость устройства при низких частотах, меньших критической. Изменение резонансной частоты устройства путем смещений калибровочного груза является, несомненно, существенно критичней, именно в силу потери симметрии устройства (и, таким образом, изменения распределения нагрузок в различных точках) прежде всего вблизи самых низких частот.
Нижний предел толщины соединения определяется максимальной нагрузкой, которую оно может выдерживать без пластических деформаций. Исполнение данных соединений может быть достигнуто предварительным изготовлением соединения электроискровой обработкой и в последующем - электрошлифовальными технологиями. Таким образом, возможно получение толщин соединений даже порядка 30 мкм, что опять же является достаточным для механической реализации размера, равного 140×134×40 мм3, см. документы [2, 3, 4, 5, 6, 7, 8]. Несмотря на то, что возможны меньшие величины, они не будут гарантировать соответствующую надежность устройства в наиболее распространенных применениях. Действительно, слишком небольшие толщины могут вызывать разрушение соединения как из-за изгибных напряжений, вызванных вращением рычагов маятника, так и растягивающего напряжения, обусловленного весом колеблющегося груза конструкции, которая полностью опирается на соединения, именно поэтому, действительно, для толщины существует минимальный предел.
Несомненно, изложенное выше имеет широкое общее значение, поскольку устройство согласно изобретению является широко изменяемым и пригодным по размерам и резонансной частоте в любом применении. Таким образом, толщина соединения является функцией как физических размеров устройства, так и проектной резонансной частоты. Это подразумевает необходимость определения каждый раз, на основе специфики применения, данной толщины при выполнении устройства и на стадии проектирования.
В итоге низкочастотное колебательное механическое устройство согласно изобретению, основано на новом проектировании и выполнении маятника Уатта, поскольку были применены эллиптические соединения, половинная часть которых работает по-новому (на сжатие, вместо растяжения, как во всех вариантах выполнения, описанных в известных документах).
Данное инновационное техническое решение является ключевым элементом, который благодаря гарантии совершенной симметрии устройства позволяет улучшить как функционирование маятника при низкой частоте, так и коэффициент механического качества, по меньшей мере, в 10 раз, по сравнению с применяемыми в настоящее время устройствами (что получено на первых экспериментальных образцах), сохраняя идентичную надежность и достоверность характеристик.
Следует учесть, что соединения, которые работают на сжатие на концах перевернутого маятника, не являются подобными соединениям на концах математического маятника, которые работают на растяжение и симметрию устройства.
Датчик согласно изобретению находит применение во всех областях, где необходимо использование по горизонтальному направлению инерционного груза, таких как, например, горизонтальные сейсмические датчики.
Библиография
[1] J.Liu, L.Ju и Blair D.G., Vibration isolation performance of an ultra-low frequency folded pendulum resonator, Physics Letters A, Elsevier, 228, (14/04/1997), c.243-349.
[2] A.Bertolini, и др., (2006), Mechanical design of a single-axis monolithic accelerometer for advanced seismic attenuation systems, Nuclear Instrument and Method, No. 556, c.616.
[3] F.Acernese, R.De Rosa, G.Giordano, R.Romano и F.Barone (2009), Tunable mechanical monolithic horizontal accelerometer for low frequency seismic noise measurement, Proc. SPIE Vol. 7292, c. 72922J-1-72922J-12, doi: 10.1117/12.814106.
[4] F.Acernese, R.De Rosa, G.Giordano, R.Romano и F.Barone (2008), Mechanical monolithic horizontal sensor for low frequency seismic noise measurement, Review of Scientific Instruments, Vol. 79, c. 074501-1-074501-8, ISSN: 0034-6748, doi: 10.1063/l.2943415.
[5] F.Acernese, G.Giordano, R.Romano, R.De Rosa, и F.Barone (2008), Mechanical monolithic accelerometer for suspension inertial damping and low frequency seismic noise measurement, Journal of Physics, Conference Series (on line), Vol. 122, c. 012012-1-012012-6, ISSN: 1742-6596, doi: 10.1088/1742-6596/122/1/012012.
[6] F.Acernese, R.De Rosa, G.Giordano, R.Romano и F.Barone (2008), Tunable mechanical monolithic accelerometer for low frequency seismic noise measurement, Proc. SPIE Vol. 7110, c. 711011-1-711011-12, doi: 10.1117/12.800429.
[7] F.Acernese, R.De Rosa, G.Giordano, R.Romano и F.Barone (2008), Tunable mechanical monolithic sensor with interferometric readout for low frequency seismic noise measurement, Proc. SPIE Vol. 6932, с. 69320K-1-69320K-12, doi: 10.1117/12.772196.
[8] G.Giordano (2008), Development and test of tunable mechanical monolithic horizontal accelerometer for low frequency seismic noise measurement, Tesi di Dottorato in "Rischio Sismico", Universita degli Studi di Napoli "Federico II".
[9] P.R.Saulson (1990) Thermal noise in mechanical experiments, Physical Review D - Particles and Fields, 3rd series, Vol. 42, No. 8, 15/10/1990, c.2437-2445.
[10] T.Stuart, и др.. (1997) Elliptical flexure hinges, Review of Scientific Instruments, 68 (3).
[11] Y.M.Tseytlin Notch flexure hinges: an effective theory, Rev. Sci. Instrum., Vol. 73, No. 9, сентябрь 2002, с.3363-3368.
Выше были описаны предпочтительные варианты выполнения и предложены некоторые модификации данного изобретения, но следует учесть, что специалистами в данной области техники могут быть внесены вариации и изменения, не выходящие за пределы объема защиты, определяемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОЧАСТОТНЫЙ СЛОЖЕННЫЙ МАЯТНИК С ВЫСОКОЙ МЕХАНИЧЕСКОЙ ДОБРОТНОСТЬЮ В ВЕРТИКАЛЬНОЙ КОНФИГУРАЦИИ И ВЕРТИКАЛЬНЫЙ СЕЙСМИЧЕСКИЙ ДАТЧИК, ИСПОЛЬЗУЮЩИЙ ТАКОЙ СЛОЖЕННЫЙ МАЯТНИК | 2012 |
|
RU2589944C2 |
| Способ и устройство для демонстрации и исследования движения математического маятника при продольных колебаниях его подвеса | 2017 |
|
RU2664230C1 |
| Способ и устройство для демонстрации и исследования движения ансамбля математических маятников при продольных колебаниях его подвеса | 2017 |
|
RU2658788C1 |
| Горизонтальный крутильный маятник | 1979 |
|
SU789965A1 |
| Учебное пособие "маятник | 1980 |
|
SU896670A1 |
| МАГНИТОВЯЗКИЙ МАЯТНИК | 2005 |
|
RU2291546C1 |
| Способ определения собственных частот колебаний механической системы с помощью вращающегося маятника | 2015 |
|
RU2647513C2 |
| Баллистический маятник | 2018 |
|
RU2672897C1 |
| Маятник Яримова | 2024 |
|
RU2838586C1 |
| Баллистический маятник с переменным весом | 2019 |
|
RU2699756C1 |


Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Заявлен складной маятник, содержащий основание (F), контрольный груз (РМ), математический маятник (SP), перевернутый маятник (IP). Причем математический маятник и перевернутый маятник соединены на одном из своих концов с контрольным грузом (PM), а на другом конце - с основанием (F) посредством четырех соответствующих соединительных устройств (G). При этом контрольный груз не соединен с основанием (F) и выполнен с возможностью колебания. Каждое соединительное устройство (G), относящееся к маятнику (PS), содержит одно или более соединений в состоянии растяжения. Каждое из соединительных устройств (G), относящееся к перевернутому маятнику (IP), содержит одно или более соединений в состоянии сжатия. Изобретение также относится к сейсмическому датчику, в котором применен складной маятник согласно изобретению. Технический результат - повышение функциональных возможностей устройства. 2 н. и 8 з.п. ф-лы, 7 ил.
1. Складной маятник, содержащий:
- основание (F);
- контрольный груз (PM);
- математический маятник (SP);
- перевернутый маятник (IP);
причем математический маятник и перевернутый маятник соединены на одном из своих концов с контрольным грузом (PM), а на другом конце - с основанием (F), посредством четырех соединительных устройств (G), при этом контрольный груз не соединен с основанием (F) и выполнен с возможностью колебания, при этом каждое соединительное устройство (G), относящееся к математическому маятнику (PS), содержит одно или более соединений в состоянии растяжения,
отличающийся тем, что каждое из соединительных устройств (G), относящееся к перевернутому маятнику (IP), содержит одно или более соединений в состоянии сжатия.
2. Складной маятник по п.1, отличающийся тем, что он выполнен в виде монолитного блока из обработанного соответствующим образом материала.
3. Складной маятник по п.2, отличающийся тем, что монолитный блок вырезан машинным способом посредством электроискровой обработки.
4. Складной маятник по п.1, отличающийся тем, что каждое из соединительных устройств (G) содержит два соединения.
5. Складной маятник по п.1, отличающийся тем, что указанное одно или более соединений выполнены в виде эллиптических соединений.
6. Складной маятник по п.5, при зависимости от п.4, отличающийся тем, что соединительные устройства (G) содержат два соединения, вычерченные удалением двух эллипсов с эксцентриситетом ε>3,2 и имеющие взаимное расстояние d>10 мкм.
7. Складной маятник по п.1, отличающийся тем, что контрольный груз (PM) выполнен в виде, по существу, параллелепипеда, с центральным отверстием, предназначенным для снижения его массы.
8. Складной маятник по любому из пп.2-7, отличающийся тем, что расстояние между лицевыми сторонами контрольного груза (PM), или основанием (F) и в каждом случае математического маятника (SP) или перевернутого маятника (IP) равно, по меньшей мере, 250 µм.
9. Сейсмический датчик, содержащий:
- складной маятник, содержащий контрольный груз (PM) и основание (F),
- устройство для детектирования наблюдаемого смещения контрольного груза (PM) относительно основания (F),
отличающийся тем, что складной маятник выполнен по любому из пп.1-8.
10. Сейсмический датчик по п.9, отличающийся тем, что устройство для детектирования наблюдаемого смещения контрольного груза (PM) выполнено в виде оптического устройства и содержит:
- источник света, который направляет световой луч на контрольный груз (PM), а именно на:
- зеркало, которое встроено в контрольный груз (PM),
- устройство для детектирования отраженного указанным зеркалом света,
- электронное устройство обработки результатов для расчета наблюдаемого смещения.
| Конвейерная система | 1983 |
|
SU1113323A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| АКСЕЛЕРОМЕТР | 1986 |
|
SU1840348A1 |
| МОНОЛИТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ВИБРАЦИОННЫЙ ДАТЧИК | 2005 |
|
RU2335775C1 |
| ЯНЧИЧ В.В., "ПЬЕЗОЭЛЕКТРИЧЕСКИЕ АКСЕЛЕРОМЕТРЫ НА ОСНОВЕ МОНОЛИТНОГО БЛОКА С ДЕФОРМАЦИЕЙ ИЗГИБА", Ж-Л "ЗАРУБЕЖНАЯ ЭЛЕКТРОНИКА", N9, 1996 г., стр.63-64 | |||
| Многомаятниковый сейсмограф | 1975 |
|
SU551583A1 |
| EP 845676 B1 ,11.09.2002 | |||

