Область техники
Настоящее изобретение касается, главным образом, монолитных вибрационных датчиков, функционирующих в дифференциальном режиме, то есть составленных из двух вибрационных элементов, закрепленных на одной опоре. Монолитный характер позволяет уменьшить стоимость изготовления, так как это позволяет избежать монтажа элементов, а функционирование в дифференциальном режиме ведет к улучшению точности измерения, сокращению влияния паразитных помех на входе, которые воздействуют одинаковым образом на оба вибрационных элемента.
В частности, изобретение относится к устройству, позволяющему развязать механические вибрации обоих вибрационных элементов, чтобы избежать ухудшения точности измерений, в том случае, когда частоты обеих вибраций близки одна к другой.
Предшествующий уровень техники
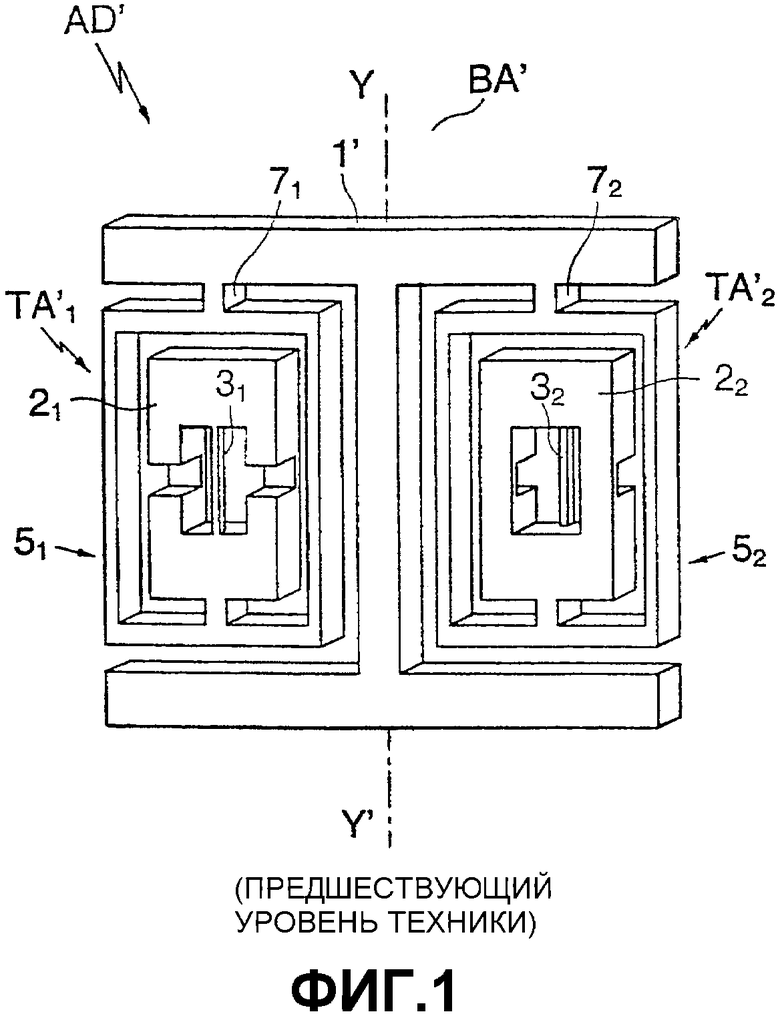
В патенте FR 2739190 раскрыт монолитный дифференциальный вибрационный акселерометр AD' (фиг.1), содержащий два вибрационных элемента TA'1 и TA'2, почти идентичных и изготовленных из одной пластины одного и того же материала одинаковой толщины. Каждый из двух вибрационных элементов TA'1 и TA'2 представляет собой преобразователь ускорения, включающий в себя образцовую массу (21, 22), резонатор (31, 32), резонансная частота которого меняется в зависимости от ускорения, направленного вдоль оси, перпендикулярной плоскости пластины, и упругие рамки (51, 52), соединенные посредством одной связующей перемычки (71, 72) с верхним стержнем фиксированной части 1', имеющей внешний вид двутавра. Преобразователи TA'1 и ТА'2 расположены симметрично по отношению к центральной оси YY' акселерометра AD'.
Фиксированная часть 1' предназначена для соединения со структурой подвижной части аппарата (не показана) основанием корпуса BA'. Таким образом, изменения частоты каждого из двух преобразователей ускорения TA'1 и ТА'2 соответствуют изменениям ускорения, испытываемого подвижной частью аппарата. Резонатор 31 выполнен заподлицо с одной из двух поверхностей пластины, а резонатор 32 выполнен заподлицо с другой поверхностью пластины, этим достигается то, что ускорение, приложенное в направлении, перпендикулярном к плоскости пластины, вызывает увеличение частоты резонанса одного из двух резонаторов и идентичное уменьшение частоты резонанса другого резонатора.
Указанный акселерометр, вообще говоря, подвергнут влиянию и других факторов на входе, помимо ускорения, которое надо измерять. Когда другие факторы на входе, называемые паразитными помехами, воздействуют одинаковым образом на оба преобразователя, как, например, в случае изменения температуры, они вызывают практически идентичные изменения частоты на обоих резонаторах. Выходной сигнал акселерометра AD' определяется разностью обеих частот. Очевидно, что таким образом влияние этих паразитных величин на входе может быть в значительной мере уменьшено и что чувствительность акселерометра - это почти удвоенная чувствительность каждого из двух преобразователей.
Каждая из гибких рамок (51, 52) предназначена для выполнения функции механического фильтра между резонатором (31, 32) и фиксированной частью 1' и упрощенно может быть рассмотрена как фильтрующий узел подвески, частота резонанса которого существенно ниже, чем у резонатора. По электрической аналогии этот тип фильтрации соответствует фильтру нижних частот второго порядка. Фиксированная часть 1' также очень мало воздействует на вибрации резонаторов, коэффициент добротности которых таким образом практически не ухудшается.
Механическая концепция акселерометра, обозначенного AD', имеет недостатки, особенно в том, что касается механической связи между вибрациями обоих резонаторов, когда частоты обеих вибраций близки одна к другой. В особенности это имеет место в том случае, когда, пытаясь создать акселерометр большой точности, стремятся получить два преобразователя TA'1 и ТА'2, по возможности наиболее идентичных, чтобы достигнуть максимального дифференциального эффекта. Это ведет к тому, что обе частоты будут скрещиваться при определении величины ускорения в измерительном диапазоне акселерометра. В этом случае при приближении к скрещиванию частот появляется феномен механической связи, который выражается вначале увеличением измерительного шума, затем - полной идентичностью обеих частот при измерении ускорения, величины которого находятся в небольшом диапазоне, названном "зоной нечувствительности". В этом диапазоне обе частоты "блокируют" одна другую, что мешает измерению ускорения. Для наглядности для акселерометра, обозначенного AD', имеющего размеры, необходимые для измерения ускорения до 100 g, и точность которого в области, достаточно удаленной от обеих частот, типична и составляет порядка 10-4 g, зона нечувствительности может достигнуть 1 g, что соответствует ухудшению точности измерения ускорения в этой зоне в 10000 раз.
Это очень большое снижение точности главным образом объясняется тремя причинами: монолитным характером конструкции акселерометра AD', почти отсутствием демпфирующих свойств у материалов, используемых в основном для создания датчиков большой точности, например кварц или кремний, и тем фактом, что обе связующих перемычки 71 и 72 непосредственно соединены между собой верхним стержнем неподвижной части 1'. Несмотря на механическую фильтрацию гибкими рамками 51 и 52, которая позволяет, чтобы неподвижная часть 1' в малой степени подвергалась воздействию вибраций резонаторов 31 и 32, очень слабое воздействие, исходящее от каждого из вибрационных элементов, непосредственно передается другому вибрационному элементу. Таким образом, когда обе частоты близки одна к другой, эффект этого очень слабого воздействия усиливается близким значением коэффициента добротности резонатора другого из указанных вибрационных элементов, это и обуславливает механическую связь между обоими резонаторами.
Так как монолитный характер и природа материалов, используемых для этих датчиков, не могут быть изменены с учетом уже цитированных преимуществ, то остается единственно возможным только путь улучшения механической концепции устройства, фиксации обоих вибрационных элементов.
Таким образом, чтобы решить проблему механической связи двух резонаторов, может оказаться важным взять за основу функцию механической фильтрации, обеспечиваемой гибкой рамкой типа тех (51, 52), что показаны на фиг.1, чтобы создать механический фильтр между двумя связующими перемычками 71 и 72 (фиг.2), где связующие перемычки соединены с гибкой рамкой 5, окружающей оба преобразователя ускорения Ta'1 и Ta'2. Таким образом можно было бы получить монолитный дифференциальный вибрационный акселерометр ADa, как он представлен на фиг.2, в котором, чтобы получать максимальную эффективность фильтрации, обеспечиваемой гибкой рамкой 5, и в соответствии с рекомендациями, упомянутыми в патенте, плоскость P, перпендикулярная плоскости рамки 5 и проходящая через обе связующие перемычки 71 и 72, является плоскостью симметрии акселерометра ADa. Тем не менее, форма и положение гибкой рамки 5 (фиг.2) не смогли бы удовлетворительно соответствовать монолитному дифференциальному вибрационному акселерометру, так как механическая связь между обоими резонаторами 31 и 32 не была бы уменьшена в достаточной мере. Для акселерометра ADa, имеющего размеры, необходимые для измерения ускорений до 100 g, и точность которого при достаточном удалении от обеих частот является типичной и составляет порядка 10-4 g, зона нечувствительности не может быть ниже 0,1 g, за счет увеличения в слишком большой степени гибкости упругой рамки 5, непоправимо уменьшая наиболее низкую собственную частоту и механическую прочность акселерометра. Этот результат, хотя и прогрессивен в отношении зоны нечувствительности, составляющей около 1 g для акселерометра AD' (фиг.1), однако еще очень далек от того, чтобы получить точность 10-4 g во всем измерительном диапазоне акселерометра. Поэтому функция механического фильтрования, обеспечиваемая гибкой рамкой 5, работающей в фильтрующем узле подвески, не соответствует тому, чтобы уменьшить в достаточной мере механическую связь между обоими резонаторами и, таким образом, зону нечувствительности.
Краткое изложение сущности изобретения
Технической задачей настоящего изобретения является устранение недостатка известного акселерометра путем создания акселерометра, в котором геометрическая форма устройства развязки, включенного в монолитную структуру дифференциального вибрационного датчика, позволяет избежать механическую связь между вибрациями обоих вибрационных элементов, когда частоты обеих вибраций близки одна к другой. Область применения изобретения не ограничена акселерометрами и распространяется более обобщено на датчики, имеющие два рабочих элемента, работающие постоянно или эпизодически на очень близких частотах, то есть для которых на практике относительное отклонение частоты меньше 0,1%. В этом случае, когда обе частоты близки, и для того, чтобы яснее изложить некоторые аспекты изобретения, вышеупомянутые частоты обозначены как "общая рабочая частота" обоих вибрационных элементов.
Согласно изобретению датчик, изготовленный из плоской пластины, включающий два почти одинаковых вибрационных элемента, функционирующих в дифференциальном режиме с общей рабочей частотой и соединенных между собой механическим устройством, симметричным по отношению к оси, перпендикулярной пластине, содержащий рамку и две связующие перемычки, поддерживающие каждый элемент, характеризуется тем, что рамка составлена из последовательности массивных и утонченных частей так, чтобы частота моды структурного резонанса рамки была максимально близкой к общей рабочей частоте и чтобы каждая из связующих перемычек была расположена в узле вибрации рамки на общей рабочей частоте, при этом механическое устройство не имеет плоскости симметрии, проходящей через перпендикулярную ось.
Таким образом, общая рабочая частота соответствует вибрации рамки при отклике на воздействие каждого из вибрационных элементов, которые спонтанно адаптируются так, чтобы помешать вибрациям обеих связующих перемычек, что позволяет достигнуть того, что вибрационное поведение одного вибрационного элемента было фактически тем же, как если бы оно было вызвано способом, не зависимым от такого же другого вибрационного элемента. Поскольку механическая связь между вибрациями элементов практически отсутствует, точность измерений дифференциальными датчиками улучшается.
Преимущественно, для хорошего функционирования устройства, выполненного с учетом широких допустимых отклонений при изготовлении, обе утонченные части, расположенные соответственно с одной и с другой стороны от каждой из двух связующих перемычек и от наиболее близких к указанной связующей перемычке зон, имеют механическую гибкость, отличающуюся одна от другой.
Чтобы датчик был компактным, вибрационные элементы располагают внутри рамки.
Краткое описание чертежей
Другие характеристики и преимущества изобретения поясняются описанием предпочтительных вариантов выполнения со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает общий вид известного монолитного дифференциального вибрационного датчика согласно изобретению;
фиг.2 - общий вид монолитного дифференциального вибрационного датчика согласно изобретению;
фиг.3 - общий вид монолитного дифференциального вибрационного датчика, имеющего устройство механической развязки, согласно первому варианту осуществления изобретения;
фиг.4 - упрощенная теоретическая модель, содержащая массы и пружины, предназначенная для объяснения функционирования устройства механической развязки, согласно изобретению;
фиг.5 - общий вид другого варианта осуществления устройства механической развязки согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
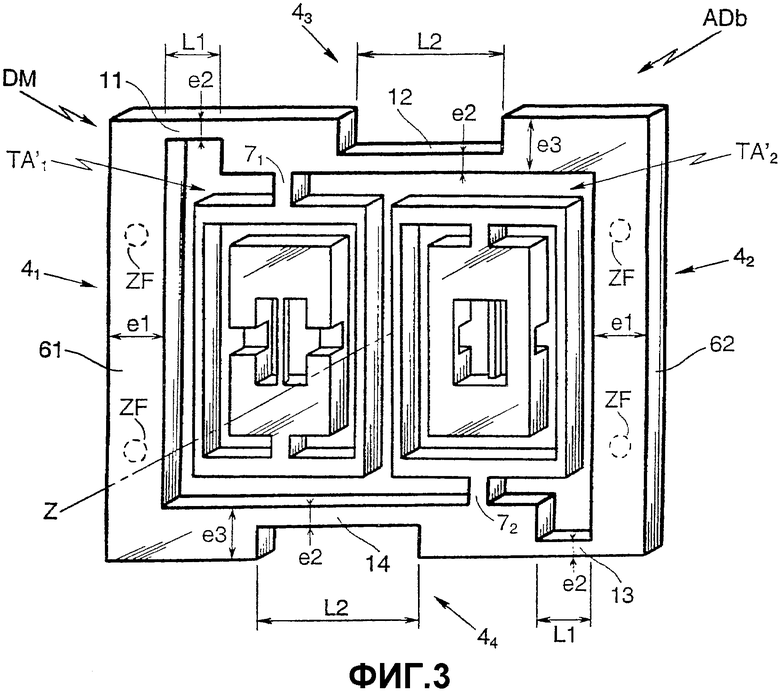
Устройство механической развязки (фиг.3) согласно изобретению соединяет два почти тождественных вибрационных элемента ТА'1 и ТА'2. Устройство выполнено в виде рамки DM, окружающей оба вибрационных элемента, с двумя связующими перемычками (71, 72), поддерживающими каждый вибрационный элемент. Рамка DM, оба вибрационных элемента TA'1 и TA'2 и обе связующие перемычки 71 и 72 образуют тело монолитного дифференциального вибрационного датчика ADb. Рамка DM и обе связующие перемычки 71 и 72 образуют плоскую структуру, для которой в качестве оси симметрии служит центальная ось Z, перпендикулярная большинству фронтальных плоскостей элементов упомянутой структуры. У вышеупомянутой структуры отсутствует плоскость симметрии, содержащая центральную ось Z.
Монолитный корпус акселерометра ADb может быть изготовлен на единственном этапе химической обработки плоской пластины из материала, например кварца или кремния, так же, как это объяснено в указанном патенте для акселерометра AD' (фиг.1). Что касается структур, предлагаемых в настоящем изобретении, то химическая обработка не позволяет точно выполнить формы различных составляющих элементов. Специалисту в данной области техники ясно, что эта неточность должна быть учтена при интерпретации некоторых описательных терминов, например толщина элементов или симметрия структуры.
Рамка AD общей прямоугольной формы имеет четыре стороны 41, 42, 43 и 44. Стороны 43 и 44 расположены одна напротив другой и каждая из них соединена со связующей перемычкой (71, 72). Стороны 41, 42 имеют величину сечения (e1), измеренную в плоскости рамки (DM). Величина сечения по длине двух других сторон 43 и 44 не постоянна, так как из них удаляется материал, чтобы получать утонченные части (11, 12, 13, 14), величина сечения которых e2 существенно меньше величины сечения e3 неутонченных частей указанных сторон. В описываемом варианте размер e2 равен примерно трети размера e3. Размер e2 определяется диапазоном от четверти до половины величины сечения (e3). Каждая из сторон 43 и 44 включает утонченную часть (11, 13) длиной L1, расположенную с одной стороны от связующей перемычки (71, 72), с которой она соединена, и утонченную часть (12, 14) длиной L2 существенно больше L1, расположенную с другой стороны от связующей перемычки. Размер L2 примерно в три раза больше размера L1. Величина отношения размеров L2 и L1 находится в диапазоне от двух до десяти. Таким образом, утонченные части 12 и 14 длиной L2, очевидно, более гибки, чем утонченные части 11 и 13 длиной L1. Эта разница в гибкости, которая составляет характеристику устройства, согласно изобретению может быть получена иначе, чем только за счет разницы в длинах L1 и L2. Так, величина сечения более тонких частей 11 и 13 может отличаться от величины сечения частей 12 и 14.
Каждая из сторон 41 и 42 сечением e1 всегда соединена с неутонченной частью одной из двух сторон 44 и 43 сечением e3 и образует с ней массивную часть (61, 62).
Таким образом, рамка DM может быть представлена состоящей из последовательности двух массивных частей (61, 62) и четырех утонченных частей (11, 12, 13, 14), расположенных так, чтобы каждая из указанных массивных частей соединялась с каждой из двух связующих перемычек при помощи утонченной части.
Акселерометр ADb фиксируется на основании корпуса (не показан), например, склеиванием на уровнях четырех маленьких круглых зон ZF (показаны пунктиром на фиг.3), расположенных на одной из поверхностей рамки DM на уровнях массивных частей 61 и 62. Эти четыре зоны фиксации ZF обеспечивают, чтобы конструкция акселерометра ADb была достаточно жесткой в измерительной полосе пропускания, обычно порядка 1000 Гц, и достаточно гибкой, чтобы не препятствовать реализации моды структурного резонанса рамки DM на частоте, близкой к общей рабочей частоте обоих вибрационных элементов, около 50000 Гц, что не могло быть достигнуто, если бы вся совокупность элементов рамки DM была зафиксирована на основании корпуса.
Рамка DM имеет размеры, обеспечивающие наличие моды структурного резонанса на общей рабочей частоте, чтобы на уровне каждой из связующих перемычек 71 и 72 оказывался узел структурного резонанса рамки. Расчет этих размеров может быть выполнен на основе теоретической модели вибрационного поведения рамки, например, как трехмерной модели с конечными элементами. Преимущественно, относительное отклонение между частотой структурного резонанса рамки и общей рабочей частотой обоих вибрационных элементов ниже 5%.
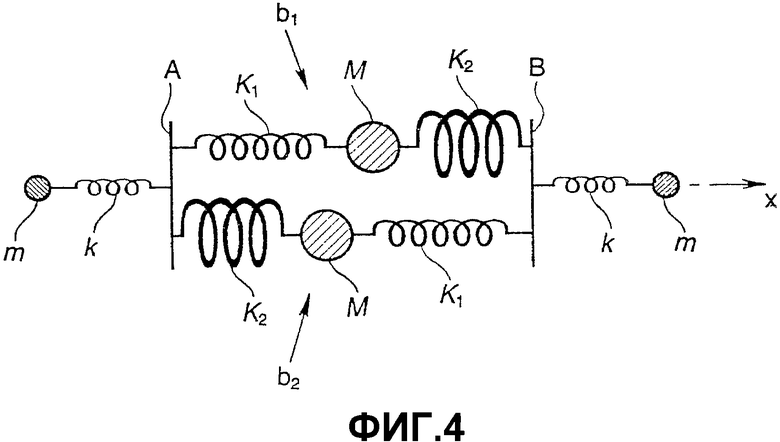
Функционирование устройства механической развязки согласно изобретению представлено на фиг.4, где показана упрощенная теоретическая модель с осью вибрации x, составленная из масс и пружин, позволяющих имитировать вибрационное механическое поведение акселерометра Adb.
Две совокупности, составленные каждая из массы m и жесткости k, представляют два вибрационных элемента TA'1 и ТА'2, общая рабочая частота которых Fo записывается как:
Каждая из указанных совокупностей соединена на уровнях (А, B) на оси x с двумя ветвями b1 и b2, составленными каждая из массы M и двух жесткостей K1 и K2. Уровни A и B представляют связующие перемычки 71 и 72 соответственно, и ветви b1 и b2 представляют рамку DM, для которой массивные части 61 и 62 представлены двумя массами M, утонченные части 12 и 14 представлены двумя жесткостями K1, и утонченные стороны 11 и 13 представлены двумя жесткостями K2 с величиной, существенно большей K1.
Модель массы-пружины на фиг.4 представляет некоторые важные аспекты механической конфигурации структуры, образованной рамкой DM и обеими связующими перемычками 71 и 72, особенно в том, что касается разницы в гибкости утонченных частей 12, 14 и утонченных частей 11, 13, где фактически каждая из массивных частей соединена с каждой из обеих связующих перемычек посредством утонченной части, симметрична по отношению к центральной оси Z и не симметрична по отношению к плоскости, проходящей через ось Z.
Чтобы обе ветви b1 и b2 модели массы-пружины, представленные на фиг.4, позволили имитировать механическое поведение рамки DM, дополнительно нужно, чтобы массы M и жесткости K1 и K2 были выбраны такими, чтобы частота Fb резонанса ветвей b1 и b2, учитывающая условия заделки на уровнях A и B, была равна общей рабочей частоте Fo:
В условиях такого выбора классические уравнения, описывающие динамичное равновесие масс m и M, позволяют показать, что при моделировании реального случая, когда уровни A и B свободны в своем перемещении, вибрация какой-либо одной из двух совокупностей, составленных каждая из массы m и коэффициента упругости k, вызывает вибрации ветвей b1 и b2, которые спонтанно адаптируются таким образом, чтобы поддерживать неподвижными уровни A и B. Таким образом, каждый из указанных узлов вибрирует так, как если бы он был заделан на неподвижных уровнях А и B. Вибрации указанных узлов не зависимы одна от другой и, следовательно, механическая связь между вибрациями отсутствует. Классические уравнения динамичного равновесия масс m и M позволяют показать, что отсутствие механической связи между вышеупомянутыми вибрациями может быть достигнуто только, если жесткости K1 и K2 отличаются одна от другой, при этом для структуры, образованной рамкой DM и обеими связующими перемычками 71 и 72, необходимо отсутствие симметрии по отношению к плоскости, содержащей центральную ось Z. Кроме того, отсутствие механической связи может быть получено только в том случае, если каждый узел, составленный из массы m и жесткости k, будет соединен с одним из уровней (А, B) двух ветвей b1 и b2, что объясняет, почему каждый из обоих вибрационных элементов должен быть соединен с устройством механической развязки согласно изобретению при помощи одной связующей перемычки.
По электрической аналогии возможно рассматривать функционирование устройства согласно изобретению подобно функционированию заграждающего фильтра, служащего для устранения электрического сигнала на конкретной частоте.
Благодаря такому принципу функционирования эффективность устройства механической развязки согласно изобретению может адаптироваться к собственной высокой частоте акселерометра ADb в отличие от предложенного ранее акселерометра Ada, представленного на фиг.2, для которого эффективность механической фильтрации, производимой рамкой 5, тем больше, чем ниже собственная частота указанной рамки, как это ранее объяснено аналогией с фильтром нижних частот второго порядка.
Таким образом возможно реализовать акселерометр ADb, содержащий устройство механической развязки согласно изобретению, с размерами, необходимыми для измерений до 100 g, зона нечувствительности которого ниже 10-4 g и наиболее низкая собственная частота которого составляет около 3000 Гц, что достаточно, чтобы обеспечить необходимую прочность акселерометра.
Упрощенная теоретическая модель позволяет также сделать вывод, касающийся допускаемых отклонений при изготовлении указанного устройства механической развязки. На практике желательно, чтобы стоимость изготовления дифференциального датчика, содержащего устройство механической развязки согласно изобретению, не включала добавочную стоимость, связанную с трудностью изготовления устройства с достаточной геометрической точностью, чтобы получить требуемую эффективность. Классические уравнения, описывающие динамическое равновесие масс m и M для теоретической модели, представленной на фиг.4, позволяют показать, что допускаемые отклонения при изготовлении устройства пропорциональны соотношению (К1-К2)2/(К1·К2). Из этого следует, что допускаемые отклонения при изготовлении тем больше, чем больше отличаются один от другого жесткости K1 и К2. Именно поэтому для варианта устройства механической развязки, показанного на фиг.3, утонченные части 12 и 14 в значительной мере гибче, чем утонченные части 11 и 13. На практике это соответствует тому, что допускаемые отклонения при изготовлении устройства составляют порядка нескольких мкм, что совместимо с точностью способов, обычно используемых при химической обработке датчиков малых размеров.
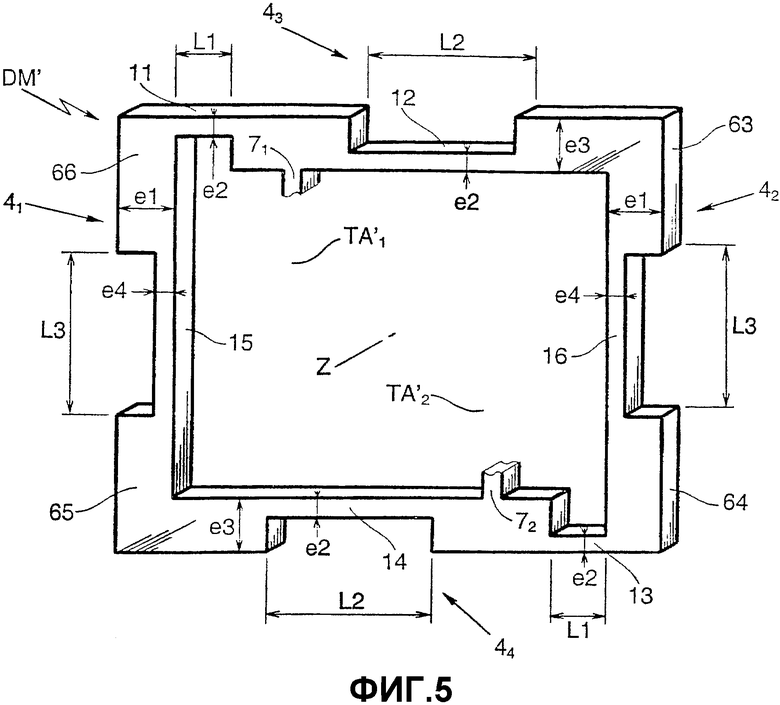
На фиг.5 представлен другой вариант реализации устройства механической развязки согласно изобретению. Устройство представляет собой прямоугольную рамку DM', составленную из четырех сторон 41, 42, 43 и 44, отличающуюся от рамки DM на фиг.3, главным образом, большим числом массивных и утонченных частей. Более точно, удаление материала в сторонах 41 и 42 осуществляется для того, чтобы получать утонченные части 15 и 16, сечение е4 которых, измеренное в плоскости рамки DM', существенно ниже сечения e1 неутонченных частей указанных сторон. Величина e4 равна примерно трети величины e1. Обобщено, величина e4 находится в диапазоне от четверти до половины величины e1. Длина L3 утонченных частей 15 и 16 всегда примерно равна длине L2 утонченных частей 12 и 14 двух других сторон 43 и 44. Обобщенно, L3 находится в диапазоне от половины до двух длин L2.
Согласно фиг.5 неутонченная часть каждой из сторон 41 и 42 всегда соединена с неутонченной частью одной из двух других сторон 44 и 43 и образует с упомянутой неутонченной частью массивную часть (65, 63), а другая неутонченная часть каждой из сторон 41 и 42 образует массивную часть (66, 64).
Таким образом, рамка DM' может рассматриваться как составленная, главным образом, из последовательности четырех массивных частей (63, 64, 65, 66) и шести утонченных частей (11, 12, 13, 14, 15, 16).
Теоретическое изучение вибрационного поведения рамки DM', осуществленное, например, посредством упрощенной теоретической модели с одной осью вибрации и составленной из четырех масс и из шести пружин, позволяет показать, что большее число массивных и утонченных частей по сравнению с рамкой DM, представленной на фиг.3, позволяет ощутимо расширить допускаемые отклонения при изготовлении, необходимые для хорошего функционирования устройства, при условии, как и для рамки DM, чтобы две утонченные части (11 и 12, 13 и 14), расположенные соответственно с одной и с другой стороны от каждой из двух связующих перемычек (71, 72) и наиболее близких к указанной связующей перемычке зон, имели бы механическую гибкость, в значительной мере отличающуюся одна от другой. Следует отметить, и это могло бы показаться интересным при изучении моделей массы-пружины, при дальнейшем увеличении числа массивных и утонченных частей это привело бы к устройству, в котором разделение между вышеупомянутыми частями было бы менее четким, чем в случаях с рамками DM и DM', а устройство не позволило бы достигнуть значительного улучшения по сравнению с рамками DM и DM'. На практике рамки DM и DM' позволяют реализовать устройство механической развязки, обеспечивают более широкие допускаемые отклонения при изготовлении рамки DM', что позволяет упростить способ изготовления и таким образом обеспечить менее дорогостоящие устройства, чем это имеет место для рамки DM.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2008 |
|
RU2364836C1 |
| ЧАСТОТНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2010 |
|
RU2436106C2 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| Датчик ускорений | 1978 |
|
SU726481A1 |
| ЧАСТОТНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2377575C2 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ДАТЧИКА ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2018 |
|
RU2679640C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕЗОНАТОР | 1992 |
|
RU2047267C1 |
Изобретение относится к монолитным вибрационным датчикам, функционирующим в дифференциальном режиме. Датчик содержит два идентичных вибрационных элемента, функционирующих на общей рабочей частоте и соединенных между собой устройством механической развязки, которое содержит рамку (DM') и две связующие перемычки (71, 72), поддерживающие каждый элемент. Рамка (DM') составлена из последовательности массивных частей (63, 64, 65, 66) и утонченных частей (11, 12, 13, 14, 15, 16) таким образом, что частота моды структурного резонанса рамки равна общей рабочей частоте и каждая связующая перемычка (71, 72) расположена в одном из узлов вибрации структуры на этой частоте. Изобретение позволяет развязать механические вибрации обоих вибрационных элементов и повысить точность измерений. 7 з.п. ф-лы, 5 ил.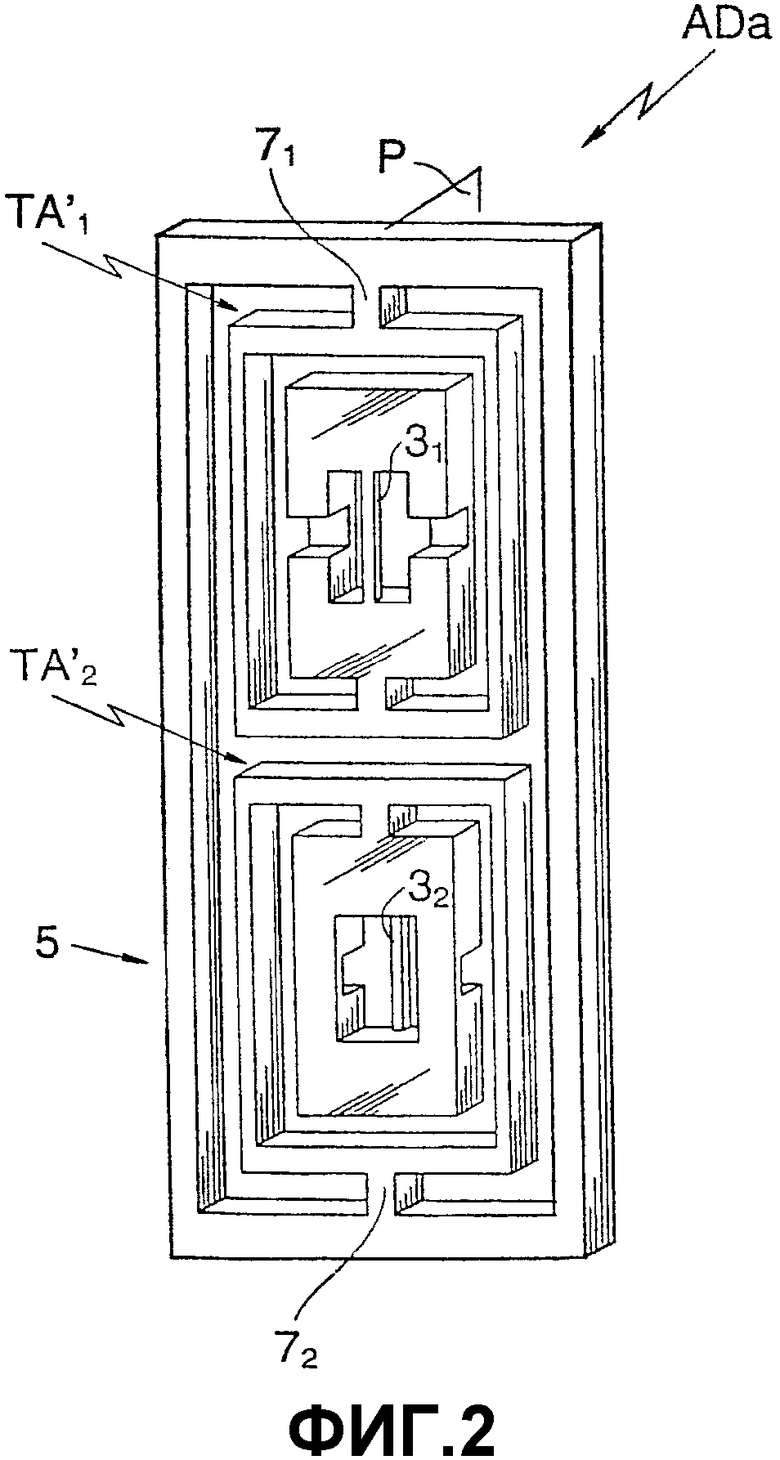
| СПОСОБ ПОЛУЧЕНИЯ КОМПОНЕНТА ВЫСОКОПЛОТНОГО И ВЫСОКОЭНЕРГОЕМКОГО РАКЕТНОГО И АВИАЦИОННОГО ТОПЛИВА НА ОСНОВЕ 2-ВИНИЛНОРБОРНАНА (ВАРИАНТЫ) | 2019 |
|
RU2739190C1 |
| US 4216402 А, 05.08.1980 | |||
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| Аддукт кристаллогидратов натриевых солей хлоркрезоксиуксусной крезоксиуксусной кислот и бикарбоната натрия в качестве биостимулятора и способ его получения | 1975 |
|
SU614087A1 |
| 1973 |
|
SU414588A1 | |

