Настоящее изобретение относится к низкочастотному сложенному маятнику с высокой механической добротностью в вертикальной конфигурации и к вертикальному сейсмическому датчику, использующему такой сложенный маятник.
Более конкретно, настоящее изобретение относится к сложенному маятнику, который может быть реализован также в виде монолитного маятника, не расположенного в классической горизонтальной конфигурации, и, по существу, разработанного и известного из литературы, но в "вертикальной" конфигурации, т.е. повернутый вверх на 90°, либо по часовой стрелке или против часовой стрелки. В частности, моноблочный вариант такого вертикального сложенного маятника позволяет очень компактные реализации, охарактеризованные высоким разделением вертикальной степени свободы от других степеней свободы и оптимальной механической добротностью.
Кроме того, изобретение относится к сейсмическому датчику, использующему такой сложенный маятник в вертикальной конфигурации, таким образом, измеряющему взаимное смещение тестовой массы маятника и его поддержки, таким образом, становясь вертикальным сейсмическим датчиком.
Более того, учитывая прямую применимость части промежуточных результатов к сложенному маятнику в горизонтальной конфигурации, задачей настоящего изобретения также является создание новой методики для калибровки резонансной частоты горизонтального маятника.
Наконец, в связи с прямой применимостью методологий и способов настоящего изобретения для всех конфигураций сложенного маятника, получаемых в результате его вращения, либо по часовой стрелке, либо против часовой стрелки, начиная от горизонтальной конфигурации до вертикальной конфигурации (вращение на 90°), задачей настоящего изобретения является способ, который позволяет использовать и калибровать частоту повернутого сложенного маятника и реализовать сейсмический датчик.
Уровень техники
Принципом, на котором основывается большинство механических систем, которые в настоящее время используются для измерения абсолютного вертикального смещения, является измерение относительного смещения по отношению к идеальной инерционной массе. Существующие реализации объединяют механические принципы и техники различной природы и точности [1] [2] [3].
Качество реализации сноса инерционной массы ограничивает чувствительность системы в целом и прежде всего частотный диапазон системы, в частности, в области низких частот. Несмотря на это, даже в гипотезе, имеющей в распоряжении действительно инерционную массу, измерения будут в любом случае ограничены тепловым шумом этой массы, шумом считывающей системы и взаимодействием датчика с окружающими шумами [1] [2] [3].
В случае измерения вертикального смещения такие системы в целом используют или могут быть связаны с колебательными системами, например, лента подходящей длины, блокированная на одном из своих концов. На другом конце такой ленты расположена подходящая масса, которая образовывает фактически инерционную массу. Реализация измерения с высокой чувствительностью при низких частотах означает, как следствие, что механические колебания системы имеют очень низкую резонансную частоту вместе с хорошей механической добротностью. Обычно эта система реализована посредством системы обратной связи, так что инерционная масса удерживается зафиксированной в положении, выбранном в качестве эталона, посредством системы управления с обратной связью. Сигнал ошибки системы управления, полученный соответствующими измерительными датчиками, обеспечивает вертикальный сигнал ускорения, из которого можно извлекать сигнал абсолютного вертикального смещения, очевидно, ограниченный чувствительностью и диапазоном измерений системы.
Изложенное ниже имеет первостепенное значение в реализации механической системы для измерения абсолюта, а также: эффективного разделения вертикальной степени свободы от других степеней свободы (горизонтальных движений, вращений и т.д.) и высокой механической добротности, которая является показателем пониженных энергетических утечек колебательной системы (тепловой шум соединений, эффект вязкости воздуха и т.д.), необходимых для видимого движения инерционной массы, не оказывающего влияние на движение неподвижной части механической системы, поддерживающей эту массу.
Механические системы с очень низкой резонансной частотой, как правило, имеют, однако, очень большие размеры, являются сложными для реализации и калибровки, и прежде всего они не являются пространственно масштабируемыми. Действительно, такие системы требуют, во-первых, балансировку силы тяжести, действующей на инерционную массу, которая, особенно на низких частотах, становится проблемой вследствие веса этой массы, и, следовательно, требуются большие силы, применяемые для ее позиционирования. Более того, при расширении диапазона измерений этих низкочастотных датчиков чувствительность системы к окружающим шумам широко увеличивается (изменения температуры, давления, влажности и т.д.), также как проблемы разделения между вертикальной степенью свободы и другими степенями свободы [1] [2] [3].
Только низкочастотная система, представляющая собой маятник Ватта [4], отличается от всех существующих механических систем, которые реализуются также в монолитном виде (с соединениями, обработанными электро-эрозией), и к тому же в классике известны экспериментальные воплощения с соединениями в растяжении [5] [6], а в новом воплощении - с некоторыми соединениями в сжатии (итальянская заявка на патент [7] включена сюда полностью в качестве ссылки), которые объединяются в полную масштабируемость датчика, полную перестраиваемость резонансной частоты, высокую добротность, большой диапазон измерения частоты, уменьшение проблемы связи между различными степенями свободы и широкую нечувствительность к окружающим шумам, как следствие эффективного сигнала системы считывания на основе оптоэлектронных методов, например, оптических затворов и лазерных интерферометров [8]. Достижения в технологическом развитии такого сложенного маятника, который, однако, благодаря своей структуре может быть использован только для горизонтальных применений, широко описываются в литературе [9-17].
Задача и предмет изобретения
Задачей настоящего изобретения является обеспечение вертикального сложенного маятника, ни разу не реализованного и не предложенного в литературе, резонансная частота которого может быть откалибрована как посредством калибровки массы, с процедурами, аналогичными тем, которые известны и применяются в литературе [5-8], так и посредством приложения внешней силы, предпочтительно дискретной и направленной.
Промежуточной задачей изобретения, нужной реализации вертикального сложенного маятника, и, таким образом, чтобы обеспечить горизонтальный сложенный маятник, резонансная частота которого может быть откалибрована, за исключением применения классическим способом, описанным в литературе [5-8], также является приложение внешней постоянной силы и параллельной (аддитивно или субтрактивно) силе тяжести, направление которой определяется по нормали к касательной к движению центральной массы в точке минимума потенциала, как будет подробно показано ниже.
Еще одним конкретным предметом настоящего изобретения является вертикальный датчик колебаний (например, сейсмических) на основе сложенного маятника объекта изобретения, а также методика, обеспечивающая калибровку существующих горизонтальных сейсмических датчиков, основанная на сложенном маятнике, который решает проблемы и преодолевает недостатки предшествующего уровня техники.
Предмет настоящего изобретения - сложенный маятник с перестраиваемой частотой колебаний, включающий:
- поддержку;
- тестовую массу;
- простой маятник;
- перевернутый маятник;
простой маятник и перевернутый маятник соединяются одним из своих концов с тестовой массой, а другим концом - с поддержкой посредством 4 соответствующих систем соединения, тестовая масса не соединена с поддержкой и поэтому свободно колеблется,
сложенный маятник отличается тем, что:
- по отношению к равновесному статическому положению простой маятник и перевернутый маятник расположены по существу вдоль расположения направления, перпендикулярного касательной к движению тестовой массы в точке геометрического центрирования по отношению к поддержке;
- первое средство настроено на или подходит для применения первой постоянной внешней силы в одной или более точках простого маятника и/или перевернутого маятника и/или тестовой массы, по направлению касательной к движению тестовой массы в точке геометрического центрирования по отношению к поддержке;
- второе средство настроено на или подходит для применения второй постоянной внешней силы вдоль указанного расположения направления в одной или более точках простого маятника и/или перевернутого маятника, и/или тестовой массы для генерации локального консервативного поля предварительно определенной величины;
частота колебаний сложенного маятника является функцией указанной второй внешней силы.
Предпочтительно, согласно изобретению, в условиях действия силы тяжести и со сложенным маятником, повернутым на веерный угол α с учетом силы тяжести g, указанная первая постоянная внешняя сила параллельна компоненте gβ силы тяжести вдоль направления, которое поворачивается на тот же угол α по отношению к силе тяжести, и такого, чтобы компенсировать, по меньшей мере частично, указанную компоненту gβ, в то время как указанная вторая постоянная внешняя сила параллельна компоненте gα силы тяжести, которая перпендикулярна компоненте gβ.
Предпочтительно, согласно изобретению, соединительные системы, имеющие отношение к простому маятнику, включают каждая одно или несколько соединений, работающих на растяжение с учетом указанной второй постоянной внешней силы, а соединительные системы, имеющие отношение к перевернутому маятнику, включают каждая одно или несколько соединений, работающих на сжатие с учетом указанной второй постоянной внешней силы.
Предпочтительно, согласно изобретению, указанная первая постоянная внешняя сила получается механически предварительной гибкой соединений, их вращением, во время производственного этапа.
Предпочтительно, согласно изобретению, указанная первая постоянная внешняя сила является магнитной силой, действующей на тестовую массу.
Предпочтительно, согласно изобретению, вторая постоянная внешняя сила является магнитной силой, действующей на тестовую массу.
Кроме того, предмет настоящего изобретения сложенный маятник с перестраиваемой частотой колебаний включает:
- поддержку;
- тестовую массу;
- простой маятник;
- перевернутый маятник;
простой маятник и перевернутый маятник соединены одним из своих концов с тестовой массой, а другим концом - с поддержкой посредством четырех соответствующих соединительных систем, тестовая масса не соединена с поддержкой и поэтому свободно колеблется, соединительные системы, имеющие отношение к простому маятнику, включают одно или более соединений, работающих на растяжение, соединительные системы, имеющие отношение к перевернутому маятнику, включают одно или несколько соединений, работающих на сжатие,
сложенный маятник отличается тем, что:
- содержит средства, сконфигурированные на или подходящие для применения постоянной внешней силы в одной или более точках простого маятника, и/или перевернутого маятника, и/или тестовой массы, в направлении касательной к движению тестовой массы в точке геометрического центрирования по отношению к поддержке;
частота колебаний сложенного маятника является функцией указанной внешней силы.
Предпочтительно, согласно изобретению, указанная постоянная внешняя сила является магнитной силой, действующей на тестовую массу.
Предпочтительно, согласно изобретению, он образован из монолитного блока из материала, предпочтительно механической обработки.
Предпочтительно, согласно изобретению, монолитный блок разрезан - обработан электро-эрозией.
Предпочтительно, согласно изобретению, каждая из указанных соединительных систем включает два соединения.
Предпочтительно, согласно изобретению, указанные одно или более соединений являются эллиптическими соединениями.
Предпочтительно, согласно изобретению, указанные соединительные системы включают два соединения, очерченные перемещением двух эллипсов с эксцентриситетом ε > 3,2 и имеющие взаимное расстояние d > 10 микрон.
Предпочтительно, согласно изобретению, тестовая масса имеет форму, по существу, параллелепипедную с центральным отверстием, выполненным в целях снижения ее массы.
Предпочтительно, согласно изобретению, расстояние между обращенными друг к другу сторонами тестовой массы или поддержки и в каждом случае простого маятника или перевернутого маятника составляет, по меньшей мере, 250 мкм.
Кроме того, конкретный предмет настоящего изобретения - датчик колебаний, в частности сейсмический датчик, включающий:
- сложенный маятник, включающий тестовую массу и поддержку, простой маятник и перевернутый маятник;
- систему для детектирования видимого смещения тестовой массы по отношению к поддержке,
и отличающийся тем, что сложенный маятник является сложенным маятником предмета изобретения.
Предпочтительно, в соответствии с изобретением, указанная система для детектирования видимого смещения тестовой массы является оптической системой и включает в себя:
- источник света, который направляет световой пучок на указанную тестовую массу, а именно на
- зеркало, которое является неотъемлемой частью указанной тестовой массы;
- устройство для детектирования света, отраженного указанным зеркалом;
- электронное обрабатывающее устройство для вычисления указанного видимого смещения.
Изобретение будет сейчас описано путем иллюстрации, но не путем ограничения, со ссылкой на фигуры прилагаемых чертежей, на которых:
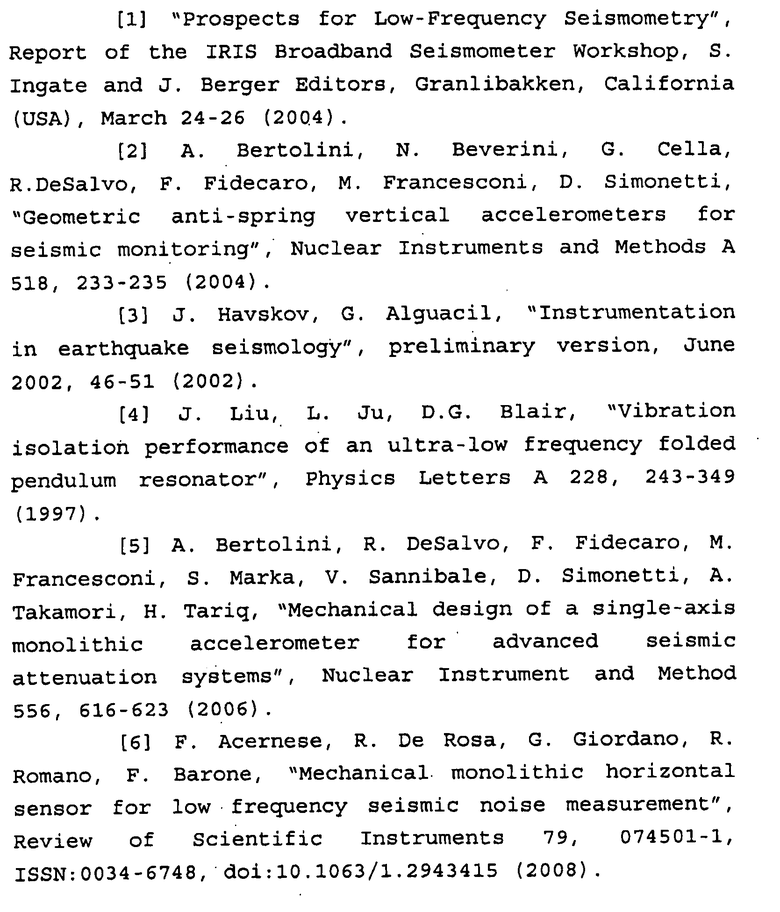
- фигура 1 показывает принципиальную схему сложенного маятника в соответствии с известным уровнем техники;
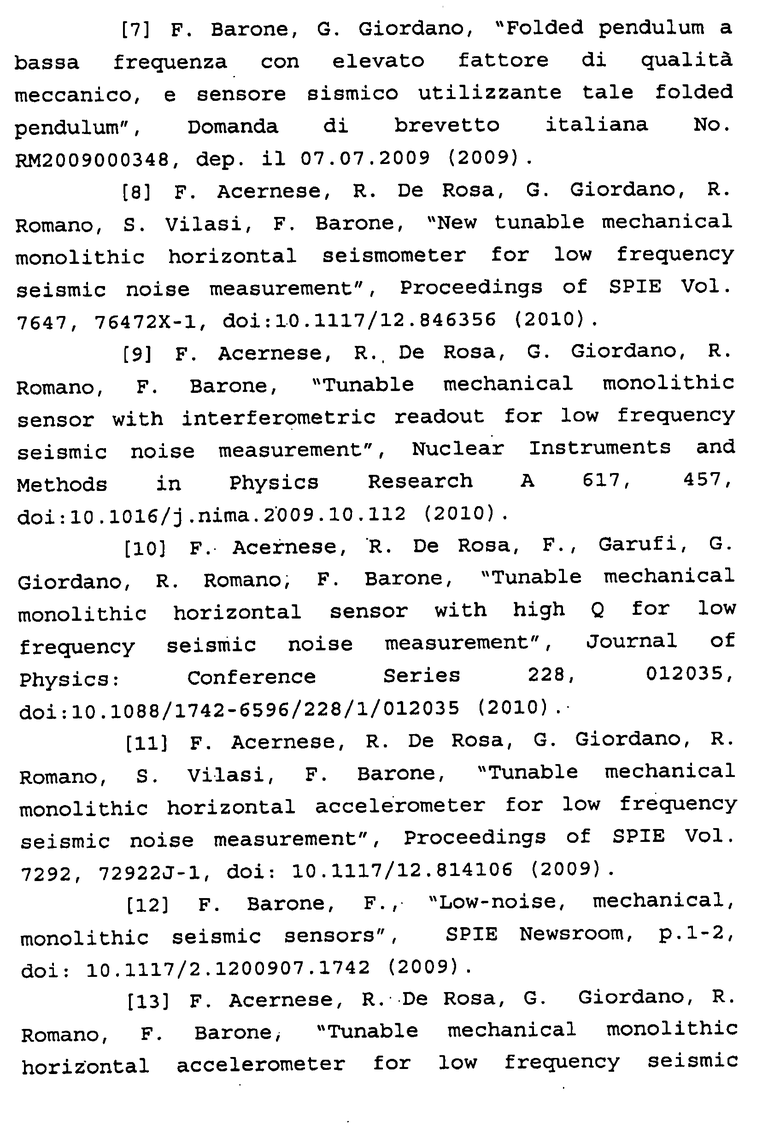
- фигура 2 показывает схему бокового вида горизонтального монолитного сложенного маятника, описанного в [7], [8] (где видны 4 из всех 8 соединений), используемого для испытаний;
- фигура 3 показывает схему бокового вида горизонтального монолитного сложенного маятника, описанного в [7], [8] (где видны 4 из всех 8 соединений), установленного вертикально (путем поворота на 90° в направлении против часовой стрелки), использованного для испытаний по настоящему изобретению, с применением на нем:
а) постоянной притягивающей магнитной силы между стороной поддержки датчика и центральной массой, порожденной постоянными магнитами МС1, МС2, примененными посредством соединения PM2 сбоку поддержки F, и центральной массы PM (для калибровки собственной резонансной частоты датчика);
б) постоянной отталкивающей магнитной силы между поддержкой датчика и центральной массой PM, порожденной посредством постоянных магнитов MG1, MG2, примененных посредством соединения PM1 к базе поддержки F и к центральной массе PM (так, сила необходима, чтобы компенсировать частично силу тяжести и центрировать центральную массу PM датчика в центре поддержки F);
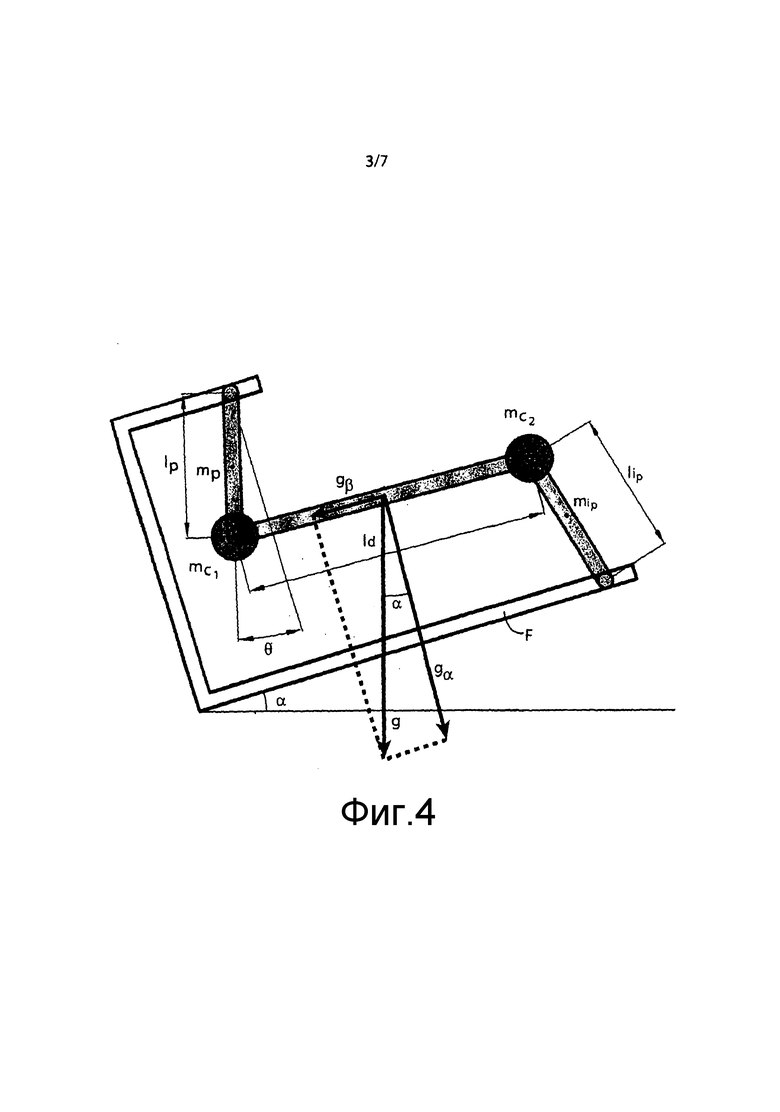
- фигура 4 показывает принципиальную схему сложенного маятника с фигуры 1, повернутого на угол в направлении против часовой стрелки;
- фигура 5 показывает схему бокового вида горизонтального монолитного сложенного маятника, описанного в [7], [8] (где видны 4 из всех 8 соединений), используемого для испытаний согласно настоящему изобретению, на которой притягивающая магнитная сила была применена между основанием датчика и центральной массой PM, порожденная постоянными магнитными конфигурациями MT1, MT2, примененными на поддержке F соединениями PM3 и центральной массы PM;
- фигура 6 показывает изменение собственной резонансной частоты горизонтального монолитного сложенного маятника в воздухе как функцию относительного расстояния между постоянными магнитами, примененными на поддержке и центральной массе, для двух положений фиксированного магнита на центральной массе, 101мм и 90мм, с произвольным смещением;
- фигура 7 показывает изменение собственной резонансной частоты вертикального монолитного сложенного маятника в воздухе как функцию модуля относительного расстояния между постоянными магнитами, примененными на поддержке и центральной массе;
- фигура 8 показывает изменение добротности монолитного вертикального сложенного маятника в воздухе как функцию резонансной частоты, полученной путем изменения относительного расстояния между постоянными магнитами, примененными сбоку поддержки и центральной массы: данные показывают линейное изменение (коэффициент корреляции равен 0,99), как это предусмотрено в теории осциллятора при наличии вязкого трения, в основном из-за присутствия воздуха между маятником, перевернутым маятником и центральной массой.
Принцип работы изобретения
Инновационный принцип сложенного маятника в вертикальной конфигурации с низкой резонансной частотой и высокой механической добротностью, датчик колебаний (например, сейсмических) и система вертикального сброса, использующие такой сложенный маятник, берут свое начало в модели оригинального монолитного сейсмического датчика "сложенный маятник", описанной в [5], и в последующих и эффективных разработках и улучшениях моделирования и технологии, описанных в [6], а также посредством новой реализации того, что уже привело к заявке на международный патент для горизонтального сложенного маятника [7] [8].
Как будет подробно описано ниже, такой сложенный маятник в вертикальной конфигурации был изобретен благодаря совершенно новой интерпретации и ни разу не рассмотренным в литературе уравнениям, описывающим поведение горизонтального сложенного маятника, известного из литературы [4-8].
Справедливость такой интерпретации модели и математической формулировки новой модели, описывающая ее, была сведена к практике одним из возможных экспериментальных вариантов, который, кстати, полностью проверяет модель, на которой основан предмет изобретения. Достигнутые научные и технические результаты и описанные ниже позволяют проверить выкладку научного и технического пути для реализации компактных вертикальных сейсмических датчиков с низкой частотой, очень высокой чувствительностью и низкой чувствительностью к окружающим шумам.
Начальной точкой описания низкочастотного вертикального сложенного маятника является принципиальная конфигурация, маятник Ватта ("сложенный маятник"), хорошо известный в литературе, обеспечивающий резонансную частоту, теоретически равную нулю с некоторыми небольшими размерами, даже если в ходе практической реализации имели место механические факторы и факторы чувствительности, которые делают ниже ограничение резонансной частоты. Ниже будет описана модель горизонтального сложенного маятника, такая модель будет основным элементом для модели вертикального сложенного маятника.
Точное описание динамики горизонтального сложенного маятника задается моделью Лагранжа, изложенной Liu и др. [4], основанной на механической схеме, описанной на фигуре 1. Механическая схема состоит из двух вертикальных плеч (соединенных только с поддержкой F), маятника (который ниже также называют простым маятником SP) длиной lp и массой mp, и перевернутый маятник (который ниже также называют перевернутым маятником IP), длиной lip и массой mip, соединенные друг с другом жесткой центральной массой (которая ниже также называется тестовая масса PM), mc. Расстояние между точками вращения центральной массы фиксировано и равно ld. В модели Liu и др. [4] два вертикальных плеча смоделированы как концентрированные эквивалентные массы, расположенные в их геометрическом центре, происходящем из lb1=lp/2 для маятника и lb2=lip/2 для перевернутого маятника, приближения вполне оправданы механическими реализациями всех реализованных прототипов. Центральная масса, mc, наоборот, смоделирована как две концентрированные эквивалентные массы, mc1 и mc2, будет (mc=mc1+mc2), расположенные в точках вращения центральной массы на расстояниях lc1 и lc2, соответственно. Введение калибровочной массы, mt (которая ниже так называемой калибровочной массы CM) на расстоянии lt от точки вращения центральной массы маятника повышает значения эквивалентных масс mc1 и mc2 частей калибровочной массы в количестве в зависимости от положения lt массы mt на основе отношения [6]:

позволяя, как можно будет увидеть ниже, изменять значение резонансной частоты одного и того же сложенного маятника.
В частности, при равной длине для двух вертикальных плеч (lb=lb1=lb2) и равных расстояниях точек вращения центральной массы (lc=lc1=lc2) гипотеза подтверждается монолитным сложенным маятником прототипов, а затем для малых углов поворота плеч маятников, потенциальная энергия может быть аппроксимирована:

где θ является углом поворота и kθ - полная угловая константа упругости соединений. Как следствие, резонансная частота сложенного маятника, f0, выражается [8]:

где ω0 является резонансной угловой частотой, Keq является константой эквивалентной упругости, которая является суммой эквивалентных гравитационных линейных констант упругости, Kgeq,

И эквивалентная константа упругости,

В то время как эквивалентная масса, Meq, выражается:

Уравнение (3) позволяет определить еще один важный параметр для проектирования горизонтального сложенного маятника, чувствительность к калибровке, Sf0, основную гарантию легкой и стабильной калибровки резонансной частоты f0. Аналитическое выражение для Sf0 получают путем взятия производной от уравнения (3) по отношению к положению калибровочной массы, lc [8]:

Это уравнение показывает, что чувствительность калибровки горизонтального сложенного маятника, кроме очевидной зависимости от геометрических параметров сложенного маятника, фактически прямопропорциональна значению калибровочной массы, mt. Здесь отмечено, что соотношения, описывающие поведение такого сложенного маятника, были получены с учетом гравитационного ускорения, g, всегда присутствующим и постоянным, так как такой сложенный маятник был разработан и использован для фиксированных положений в гравитационном поле. Применение системы предмета настоящего изобретения в пространстве, в котором не существует гравитационного поля, не изменяет в принципе формулы этого изобретения, в частности, в отношении метода калибровки, который будет описан ниже.
Уравнение (3) показывает также границы его использования. Действительно, в отсутствие гравитационного поля (т.е. даже с компенсацией гравитационного поля) эквивалентная гравитационная постоянная, Kgeq, исчезает, поскольку гравитационное ускорение, g, исчезает. Поэтому уравнение (3) сводится к:

Откуда можно сделать вывод, что при отсутствии силы тяжести сложенный маятник теряет все свои основные особенности управляемости, возможность реализации низкочастотного резонанса и т.д., фактически являясь ограниченным вращательными константами упругости соединений, которые не могут быть компенсированы никоим образом.
Одним из ключевых элементов, который составляет один из новых элементов, введенных в рамках изобретения, является то, что действующей на величину эквивалентной гравитационной линейной константы упругости, Kgeq, применяется постоянная внешняя сила, параллельная (аддитивная и субтрактивная) гравитационной силе, чье геометрическое направление перпендикулярно касательной к движению центральной массы горизонтального сложенного маятника в точке минимума потенциала.
Для этой цели важна не типология такой силы (магнитная, электромагнитная, электростатическая и др.), а ее постоянство с течением времени, необходимое для создания локального консервативного поля, похожего на гравитационное поле, но имеющего значение, определенное на этапе проектирования. Типология силы становится, вместо этого, важна с целью оценки соединения такой силы и, следовательно, горизонтального сложенного маятника с внешними окружающими шумами.
Важно уточнить, что, в соответствии с принципом, такой силой необязательно действовать одновременно на все движущиеся механические компоненты сложенного маятника (маятник, перевернутый маятник, центральную массу и калибровочную массу), но также можно реализовать такое действие на отдельном компоненте, если такой результат технически более удобный для реализации и для необходимых применений.
Применение, например, постоянной силы к центральной массе датчика, которая может быть динамически описана ускорением, aest, изменяющим выражение резонансной частоты (3) в

где geq = g + aest - эквивалентное гравитационное ускорение, сумма гравитационного ускорения, g, и внешнего ускорения, aest, порожденного применяемыми постоянными внешними силами. Это соотношение позволяет проверить, что можно варьировать резонансную частоту системы простым изменением амплитуды прикладываемой внешней силы, без механического вмешательства в сложенный маятник.
Следует отметить в выражении (9) модели, что эффект от применения внешней силы к центральной массе распространяется также и на массы плеч и калибровочную массу. Более того, в такой модели были рассмотрены продольно нерастяжимые соединения (при растяжении и сжатии), так что сила, приложенная к центральной массе, рассмотрена на основе этой гипотезы, примененной одинаково к массам плеч маятника и калибровочной массе. Более точные модели могут только улучшить точность определения резонансной частоты сложенного маятника, но, фактически, не изменяют сущность принципа, на котором основано настоящее изобретение.
Очевидно, что этот тип конфигурации делает полностью удобным сложенный маятник в горизонтальной конфигурации даже для применения в отсутствие силы тяжести (например, в пространстве применения перевернутого маятника), так как ускорение, aest, порожденное применением постоянной внешней силы, компенсирует контролируемым образом отсутствие гравитационного ускорения, g.
Кстати, изменение гравитационного ускорения, geq, имеет прямое влияние на значение резонансной частоты, как можно убедиться из соотношения (3). Такой эффект может быть количественно определен выражением чувствительности частоты собственных колебаний по отношению к изменениям постоянной geq, задаваемым

Введение постоянной силы, которая также заявлена в настоящем изобретении, для последствий и структурных модификаций даже в реализации горизонтального сложенного маятника, становится основным элементом для реализации вертикального сложенного маятника, который является абсолютно новым, не имеющим никогда реализации и обсуждения в литературе. Действительно, как будет продемонстрировано ниже, такое новшество позволяет воссоздать те же условия работы горизонтального сложенного маятника, сохраняя все особенности, которые отличают его от других конфигураций и которые являются его точками силы, среди которых, в частности, напомним: низкая резонансная частота, компактные решения, такие как монолитность, и более сниженная связь измерения степени свободы по отношению к другим степеням свободы [5-8].
Базовой структурой вертикального сложенного маятника, предметом изобретения является то, что горизонтальный маятник повернут по часовой стрелке (или против часовой стрелки) на 90°, для которого воспроизводятся такие же условия, как для горизонтального маятника (фигура 3).
В вертикальной конфигурации центральная масса обязана иметь чисто вертикальные перемещения. Однако вращение на 90° сложенного маятника изменяет эффект действия гравитационного ускорения, g. Действительно, последнее больше не действует в направлении, перпендикулярном движению, а в направлении, параллельном движению центральной массы.
Как видно из фигуры 3, центральная масса принимает вертикальное положение равновесия, определенное уравнением, регулирующим ее статическое положение. Это положение, принятое соединениями в первом приближении, охарактеризованными одинаковыми коэффициентами угловой упругой деформации, может быть определено глобальной константой упругости, Kθ, которая учитывает как константы упругости, так и геометрическую форму системы, и с помощью общей массы, Mt, то есть суммы всех масс (маятника, перевернутого маятника, центральной массы и калибровочной массы), посредством классического соотношения:

Это соотношение обеспечивает угол θ0, в котором вертикальный маятник статически расположен. В других отношениях, принимая во внимание то, что константы упругости соединений, как правило, имеют очень малые значения (это связано с тем, что, в основном, в монолитной реализации соединения, как правило, очень тонкие для достижения очень низких резонансных частот и эффекта удобной и эффективной калибровки, в основном, в области низких частот), как правило, центральная масса падает на раму, сводя на нет функционирование сложенного маятника. Однако, имея дело с чисто статическим позиционированием, можно обратно настроить сложенный маятник в статическую конфигурацию, как правило, центрирующую горизонтальный сложенный маятник, двумя различными способами, но одинаково эффективными, применение которых зависит от значения масс, составляющих маятник.
Первый способ состоит во внешней силе, параллельной силе тяжести, которая компенсирует ее (или с более низкой эффективностью, с точки зрения динамики датчика, частично).
Такая сила может быть применена, например, к центральной массе, будучи технически наиболее удобным выбором. Также в этом случае типология такой силы (магнитная, электромагнитная, электростатическая и т.д.) не важна, скорее, ее постоянство по времени, необходимое для создания локального консервативного поля, подобного и противоположного земному гравитационному полю. Типология силы, между тем, даже в этом случае, важна для окончательной оценки соединения такой силы и, следовательно, сложенного маятника, с внешними окружающими шумами. В этом случае угол, θ0, сводится к θ0=0, а сложенный маятник принимает точно такую же статическую геометрическую конфигурацию, что была бы принята, если бы он был расположен в горизонтальной конфигурации (фиг. 3).
Второй способ заключается в реализации конфигурации вертикального сложенного маятника посредством предварительной гибки соединений, полученной их вращением. С этой целью используется значение вращающей упругой силы, возникающей при скручивании соединений сложенного маятника. Соединения разработаны и выполнены таким образом, что вес центральной массы, калибровочной массы, маятника и перевернутого маятника точно сбалансирован порожденным моментом скручивания таким образом, что центральная масса будет расположена точно в статическом геометрическом положении, что было бы, если принять, что сложенный маятник был расположен в горизонтальной конфигурации. Эта конфигурация, хотя и более трудно реализуемая, поскольку она требует очень точной оценки в конструкции датчиков и этапе реализации, является на самом деле нечувствительной к воздействию вертикальных окружающих шумов.
С учетом того, что было показано ранее и сделанных ранее предположений, даже для вертикального сложенного маятника, расположенного в геометрическом положении равновесия, при малых углах поворота плеч маятников, потенциальная энергия может быть приближена:

где θ является углом поворота, kθ - полной угловой константой упругости соединений, и aest является внешним ускорением, порожденным применением постоянных внешних сил, приложенных, например, к центральной массе, и для которых все гипотезы и соображения, сделанные ранее, верны, которые касаются точности модели, но не изменяют сущности принципа, на котором основано изобретение.
Отсюда следует, что резонансная частота вертикального сложенного маятника, fν, описана соотношением, структурно аналогичным горизонтальному маятнику (уравнение (9)), в котором эквивалентное гравитационное ускорение сводится к только внешнему ускорению:

где ων - вертикальная угловая резонансная частота, Meq - эквивалентная масса, и Kνeq - эквивалентная вертикальная константа упругости, которая является суммой эквивалентной константы упругости Keeq соединений и эквивалентной линейной константы упругости внешних сил, Kaeq,

Аналогично тому, как было сделано для горизонтального сложенного маятника, также для вертикального маятника, можно определить выражение, которое определяет количество его чувствительности к калибровке, Sfν, фундаментально, чтобы гарантировать легкую и стабильную калибровку частоты, fν, полученную выводом уравнения (13) по отношению к положению калибровочной массы, lc,

Это уравнение показывает, что чувствительность калибровки сложенного маятника, кроме очевидной зависимости от геометрических параметров сложенного маятника, является фактически прямопропорциональной величине калибровочной массы, mt, и величине внешнего ускорения, aest.
Между тем, чувствительность резонансной частоты fν к изменениям ускорения, порожденного приложенными внешними статическими силами, aest, задается

Сложенный маятник, повернутый на любой угол в диапазоне от 0° (горизонтальный сложенный маятник) и 90° (вертикальный сложенный маятник), может быть фактически всегда смоделирован объединением поведения горизонтального маятника и вертикального маятника. Действительно, вращение на общий угол α внешней рамы по отношению к горизонтальной плоскости изменяет направление действия гравитационного ускорения, g.
Гравитационное ускорение, g, может быть, таким образом, разложено на две компоненты: компоненту, перпендикулярную движению центральной массы, gα = g*cosα, и компоненту, параллельную движению центральной массы, gβ = g*sinα (фиг. 4).
Для правильного функционирования повернутого сложенного маятника, или, по крайней мере, для достижения максимальной динамики, компонента g, параллельная движению центральной массы, gβ, может быть компенсирована статически в некоторой степени, аналогично тому, как описано выше для сложенного маятника вертикальной конфигурации. Действительно, в случае чисто статического позиционирования можно обратно настроить сложенный маятник в центр статической конфигурации применением внешней силы, параллельной компоненте gβ силы тяжести, которая компенсирует ее полностью (или с более низкой эффективностью, с точки зрения динамики датчика, частично) или посредством реализации конфигурации сложенного маятника предварительной гибкой соединений, полученной их вращением.
Резонансная частота повернутого сложенного маятника описана, между тем, всегда уравнением (9) с эквивалентным гравитационным ускорением, определяемым как:

Следовательно, определив эквивалентное гравитационное ускорение посредством уравнения (17), модель сложенного маятника, повернутого на любой угол от 0° до 90° в направлении по часовой или против часовой стрелки, описана в полном виде уравнениями от уравнения (9) до уравнения (16).
Экспериментальная реализация изобретения
Основная схема, использованная для реализации прототипа вертикального сложенного маятника, идентична классической для монолитного горизонтального сложенного маятника, описанного в литературе [5-8], представляет собой по существу простой маятник, перевернутый маятник и стержень, соединяющий осциллирующие концы этих маятников [6].
Монолитное осуществление такого сложенного маятника было выбрано к концу реализации маятника уменьшенных размеров, полностью масштабируемое, не сильно чувствительное к окружающим шумам и с низким тепловым шумом, в частности на низкой частоте [5-8] [18]. Более того, все механические компоненты (колеблющиеся части и соединения) реализованы посредством обработки электро-эрозионной резкой только блока материала, тепловые шумы, образующиеся фактически в соединениях, сведены, фактически, к минимуму [6] [18].
На чертежах сноска F относится к раме, сноска PM - к тестовой массе, сноска IP - к перевернутому маятнику и сноска SP - к простому маятнику, G, между тем, относится к общим соединениям. К тестовой массе PM далее может быть добавлена масса CM, которая не была произведена вначале из того же монолитного блока и называется калибровочной массой, которая будет использоваться для калибровки системы по частоте (изменение собственной резонансной частоты).
Так, составленной системе необходимо 4 гибких соединения. Каждое из соединений реализовано в паре (на общую сумму 8 соединений) к концу ограничения скручивающего эффекта в тех же соединениях и, таким образом, сведено к минимуму взаимодействие между горизонтальной поперечной и продольной степенями свободы (фиг. 2, фиг. 3 и фиг. 5). Такие соединения, соответственно, соединяют:
- конец простого маятника и раму его поддержки;
- колеблющийся конец простого маятника и конец стержня соединения между маятниками;
- другой конец стержня соединения и колеблющийся конец перевернутого маятника;
- конец перевернутого маятника и конструкцию, поддерживающую сложенный маятник.
Прототип монолитного датчика, показанного на фигуре 2, был реализован изначально из алюминиевого блока (сплав 7075-Т6) 134мм х 140мм х 40мм точной механической обработки. Электро-эрозионная техника (EDM) была использована для отделения плеча маятника, плеча перевернутого маятника и центральной массы от поддержки. Также четыре соединения были реализованы посредством электро-эрозионной резки, используя тонкий разрез в 250 мкм. Такие соединения реализуются с эллиптическим профилем толщиной не менее 100 мкм с коэффициентом эллиптичности, равным 16/5. Плечи маятников (длиной 81,5мм, толщиной 102мм разнесены на 3,50мм от центральной массы и поддержки) разработаны для минимизации массы и момента инерции без потери жесткости и симметрии. Действительно, лучшие результаты, с точки зрения низкой резонансной частоты и соответствующего высокого значения фактора механической добротности вместе с компактными размерами системы, были получены Barone и др. [8]. Использование соединений эллиптического типа, помимо гарантирования высоких факторов добротности для монолитных реализаций, прежде всего на низких частотах, дает подходящую надежность соединения, несмотря на малые размеры их профиля. Очевидно, что ряд других геометрических конфигураций соединений может быть использован с различными функциями и возможностями, даже по отношению к введенному тепловому шуму, который составляет, в соответствии с принципом, окончательный предел чувствительности того же сенсора [18] [19].
Очевидно, что в конфигурации, в которой такой сложенный маятник повернут на 90° по отношению к вертикали в направлении по часовой стрелке (или против часовой стрелки), нельзя, в соответствии с принципом, говорить о маятнике и перевернутом маятнике для плеч маятника, поддерживающих центральную массу, в связи с тем, что гравитационное ускорение действует поперек таких плеч. Эти плечи, в любом случае, принимают снова свои функции, когда присутствует приложенное внешнее ускорение, aest.
Статическое позиционирование датчика и введение внешней горизонтальной силы, действующей на центральную массу притягивающим способом (порождающим внешнее ускорение, aest), было получено с применением магнитных сил, как описано выше.
К концу оценки эффективности и функциональности модели были выполнены две серии измерений.
К концу показа возможности и соответствия горизонтальной процедуры калибровки прототип горизонтального сложенного маятника были использованы в версии с четырьмя соединениями на растяжение и четырьмя соединениями на сжатие [7] [8] (фигура 2). Очевидно, что и без всякого ограничения общности, любая реализация сложенного маятника может быть использована. К центральной массе этого прототипа была применена притягивающая постоянная магнитная сила между основанием датчика и центральной массой, порожденная конфигурацией с двумя постоянными магнитами, приложенными между поддержкой и центральной массой (фигура 4).
Результаты, описывающие эффекты изменения резонансной частоты как функции величины приложенного внешнего ускорения, aest, введением постоянного магнитного поля, для горизонтального сложенного маятника в воздухе, приведены на фигуре 6. Такие результаты показывают всю функциональность изобретения в конце калибровки резонансной частоты горизонтального сложенного маятника.
В завершение экспериментальной демонстрации возможности вертикального сложенного маятника образец горизонтального сложенного маятника был использован в версии с четырьмя соединениями на растяжение и четырьмя соединениями на сжатие [7] [8] (фиг. 3).
Применением того, что было описано в предыдущем разделе, и устанавливанием подходящим образом расстояния между магнитом на базе датчика и тем, что расположен на центральной массе, которые работают на отталкивание, центральная масса будет статически расположена в центральном положении.
Впоследствии расстояние между магнитом, расположенным на центральной массе, и тем, что расположен сбоку на внешней поддержке датчика, которые работают на притяжение, изменялось, изменяя, таким образом, собственную резонансную частоту датчика, как описано и предусмотрено моделью, описанной в предыдущем разделе.
Результаты, приведенные на фигуре 7 (резонансная частота как функция расстояния между горизонтальными магнитами) и 8 (фактор добротности как функция резонансной частоты), один из которых является производной полного соответствия и функциональности изобретения, описанного здесь.
Список литературы:
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОЧАСТОТНЫЙ СКЛАДНОЙ МАЯТНИК С ВЫСОКИМ КОЭФФИЦИЕНТОМ МЕХАНИЧЕСКОГО КАЧЕСТВА И СЕЙСМИЧЕСКИЙ ДАТЧИК С УКАЗАННЫМ МАЯТНИКОМ | 2010 |
|
RU2518587C2 |
| Маятник Яримова | 2022 |
|
RU2801109C1 |
| Маятник Яримова | 2022 |
|
RU2792769C1 |
| Маятник Яримова | 2024 |
|
RU2838586C1 |
| Способ и устройство для демонстрации и исследования движения математического маятника при продольных колебаниях его подвеса | 2017 |
|
RU2664230C1 |
| Горизонтальный крутильный маятник | 1978 |
|
SU697946A1 |
| Способ и устройство для демонстрации и исследования движения ансамбля математических маятников при продольных колебаниях его подвеса | 2017 |
|
RU2658788C1 |
| МАГНИТОВЯЗКИЙ МАЯТНИК | 2005 |
|
RU2291546C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Баллистический маятник | 2018 |
|
RU2672897C1 |





Изобретение относится к измерительной технике и может быть использовано в сейсмоприемных устройствах. Предложен сложенный маятник, который может быть реализован в виде монолитного маятника, который не расположен в вертикальной конфигурации, т.е. повернутый на 90°, либо в направлении по часовой стрелке, либо против часовой стрелки. В частности, вариант такого вертикального сложенного маятника в монолитной конфигурации представляет более компактную реализацию, охарактеризованную высоким разделением вертикальной степени свободы от других степеней свободы. Технический результат - достижение оптимальной механической добротности устройства. 3 н. и 13 з.п. ф-лы, 8 ил.
1. Сложенный маятник с перестраиваемой частотой колебаний, включающий:
- поддержку (F);
- тестовую массу (PM);
- простой маятник (SP);
- перевернутый маятник (IP);
простой маятник и перевернутый маятник соединены одним из своих концов с тестовой массой (PM), а другим концом - с поддержкой (F) посредством соответствующих четырех систем соединения (G), причем тестовая масса не соединена с поддержкой (F) и поэтому свободно колеблется,
сложенный маятник отличается тем, что:
- по отношению к равновесному статическому положению простой маятник (SP) и перевернутый маятник (IP) расположены по существу вдоль расположения направления, перпендикулярного касательной к движению тестовой массы (PM) в точке геометрического центрирования по отношению к поддержке (F);
- первое средство для применения первой постоянной внешней силы в одной или более точках простого маятника (SP) и/или перевернутого маятника (IP), и/или тестовой массы (PM), по направлению касательной к движению тестовой массы (PM) в точке геометрического центрирования по отношению к поддержке (F);
- второе средство для применения второй постоянной внешней силы вдоль указанного расположения направления в одной или более точках простого маятника (SP) и/или перевернутого маятника (IP);
и/или тестовой массы (PM) для генерации локального консервативного поля предварительно определенной величины;
частота колебаний сложенного маятника является функцией указанной второй внешней силы.
2. Сложенный маятник по п. 1, отличающийся тем, что в условиях действия силы тяжести и со сложенным маятником, повернутым на веерный угол α с учетом силы тяжести g, указанная первая постоянная внешняя сила параллельна компоненте gβ силы тяжести вдоль направления, которое поворачивается на тот же угол α по отношению к силе тяжести, и такого, чтобы компенсировать, по меньшей мере частично, указанную компоненту gβ, в то время как указанная вторая постоянная внешняя сила параллельна компоненте gα силы тяжести, которая перпендикулярна компоненте gβ.
3. Сложенный маятник по п. 1, отличающийся тем, что соединительные системы, имеющие отношение к простому маятнику (SP), включают в себя каждая одно или несколько соединений, работающих на растяжение с учетом указанной второй постоянной внешней силы, а соединительные системы, имеющие отношение к перевернутому маятнику (IP), включают в себя каждая одно или несколько соединений, работающих на сжатие с учетом указанной второй постоянной внешней силы.
4. Сложенный маятник по п. 1, отличающийся тем, что указанная первая постоянная внешняя сила получается механически предварительной гибкой соединений, их вращением, во время производственного этапа.
5. Сложенный маятник по п. 1, отличающийся тем, что указанная первая постоянная внешняя сила является магнитной силой (PM1, MG1, MG2, F2), действующей на тестовую массу (PM).
6. Сложенный маятник по п. 1, отличающийся тем, что вторая постоянная внешняя сила является магнитной силой (PM2, MCI, МС2, F3), действующей на тестовую массу (PM).
7. Сложенный маятник с перестраиваемой частотой колебаний, включающий:
- поддержку (F);
- тестовую массу (PM);
- простой маятник (SP);
- перевернутый маятник (IP);
простой маятник и перевернутый маятник соединены одним из своих концов с тестовой массой (PM), а другим концом - с поддержкой (F) посредством четырех соответствующих соединительных систем (G), тестовая масса не соединена с поддержкой (F) и поэтому свободно колеблется, соединительные системы (G), имеющие отношение к простому маятнику(PS), включают одно или более соединений, работающих на растяжение, соединительные системы (G), имеющие отношение к перевернутому маятнику (IP), включают одно или несколько соединений, работающих на сжатие,
сложенный маятник отличается тем, что:
- содержит средства, сконфигурированные на или подходящие для применения постоянной внешней силы в одной или более точках простого маятника (SP), и/или перевернутого маятника (IP), и/или тестовой массы (PM), в направлении касательной к движению тестовой массы (PM) в точке геометрического центрирования по отношению к поддержке (F);
частота колебаний сложенного маятника является функцией указанной внешней силы.
8. Сложенный маятник по п. 7, отличающийся тем, что указанная постоянная внешняя сила является магнитной силой (PM3, T1, MT2, F4), действующей на тестовую массу (PM).
9. Сложенный маятник по любому из пп. 1-8, отличающийся тем, что он образован из монолитного блока из материала механической обработки, представляющей собой электроэрозию.
10. Сложенный маятник по любому из пп. 1-7, отличающийся тем, что каждая из указанных соединительных систем (G) включает в себя два соединения.
11. Сложенный маятник по любому пп. 1-7, отличающийся тем, что указанные одно или более соединений являются эллиптическими соединениями.
12. Сложенный маятник по любому из пп. 1-7, отличающийся тем, что указанные соединительные системы (G) включают в себя два соединения, очерченные перемещением двух эллипсов с эксцентриситетом ε > 3,2 и имеющие взаимное расстояние d > 10 микрон.
13. Сложенный маятник по любому из пп. 1-7, отличающийся тем, что тестовая масса (PM) имеет форму, по существу, параллелепипедную с центральным отверстием, выполненным в целях снижения ее массы.
14. Сложенный маятник по любому из пп. 1-7, отличающийся тем, что расстояние между обращенными друг к другу сторонами тестовой массы (PM) или поддержки (F) и в каждом случае простого маятника (SP) или перевернутого маятника (IP) составляет, по меньшей мере, 250 мкм.
15. Датчик колебаний, в частности сейсмический датчик, включающий:
- сложенный маятник, включающий в себя тестовую массу (PM) и поддержку (F), простой маятник (SP) и перевернутый маятник (IP);
- систему для детектирования видимого смещения тестовой массы (PM) по отношению к поддержке (F),
и отличающийся тем, что сложенный маятник является сложенным маятником по любому из пп. 1-14.
16. Датчик по п. 15, отличающийся тем, что указанная система для детектирования видимого смещения тестовой массы (PM) является оптической системой и включает в себя:
- источник света, который направляет световой пучок на указанную тестовую массу (PM), а именно на
- зеркало, которое является неотъемлемой частью указанной тестовой массы (PM);
- устройство для детектирования света, отраженного указанным зеркалом;
- электронное обрабатывающее устройство для вычисления указанного видимого смещения.
| WO 2011004413 A2, 13.01.2011 | |||
| Конвейерная система | 1983 |
|
SU1113323A1 |
| US 20090056447 A1 , 05.03.2009 | |||
| EP 845676 B1 ?, 11.09.2002 | |||
| АКСЕЛЕРОМЕТР | 1986 |
|
SU1840348A1 |
| МОНОЛИТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ВИБРАЦИОННЫЙ ДАТЧИК | 2005 |
|
RU2335775C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |

