Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано в системах интервального регулирования движения рельсовых транспортных средств.
Известны системы регулирования движения рельсовых транспортных средств, использующие декодирование сигналов автоматической локомотивной сигнализации для управления движением и содержания на рельсовых транспортных средствах приемники кодовых сигналов, индуктивно связанные с путевыми электрическими рельсовыми цепями, каждая из которых содержит блок контроля свободности и исправности рельсового пути и блок путевого передатчика кодовых сигналов автоматической локомотивной сигнализации, связанный с блоком задания направления движения при автоблокировке по соответствующему пути перегона (Федоров Н.Е. «Современные системы автоблокировки с тональными рельсовыми цепями», Самара, СамГАПС, 2004, рис 3.1, с.72).
Недостатком известного технического решения является ограниченная возможность поддержания оптимального скоростного режима, что снижает пропускную способность железнодорожного участка.
Наиболее близким техническим решением к изобретению является принятая в качестве прототипа система, реализующая способ, включающий выделение из принимаемых на рельсовом транспортном средстве кодовых сигналов, поступающих от путевых формирователей кодовых сигналов, информационных сообщений о количестве свободных и исправных блок-участков и/или рельсовых цепей перед рельсовым транспортным средством, об идентифицирующих номерах блок-участка и/или рельсовой цепи и о текущем местонахождении головы рельсового транспортного средства. Система, реализующая этот способ и обеспечивающая управление рельсовым транспортным средством, содержит на каждом рельсовом транспортном средстве блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены, соответственно, с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу (RU 2423269, B61L 25/04, 10.07.11).
Недостаток известного технического решения заключается в том, что при сбое (например, из-за помех по электропитанию) в определении текущей координаты места нахождения транспортного средства теряется информация не только о его местонахождении в привязке к электронной карте маршрута, но и информация о максимальных допустимых скоростях движения, обусловленных конструктивными ограничениями железнодорожного пути. Эта ситуация требует снижения скорости до разрешенной по условиям безопасности проследования ограничивающих элементов путевой инфраструктуры. Например, так как из-за сбоя появляется неопределенность в том, какой маршрут приема будет использован - по главным путям станции или по боковым путям станции, система управления рельсовым транспортным средством автоматически выбирает ограничение скорости при движении по боковым путям. Движение с этой скоростью происходит до восстановления правильной привязки к электронной карте маршрута. Если восстановление привязки к электронной карте маршрута задержится вплоть до подхода транспортного средства к горловине принимающей станции, то это приводит к существенным задержкам в приготовлении маршрутов для других поездов и снижению пропускной способности в горловине станции приема.
Технический результат изобретения заключается в уменьшении влияния сбоев в точном определении позиции рельсового транспортного средства на пропускную способность.
В части способа технический результат достигается тем, что в способе управления рельсовым транспортным средством, по которому на каждом блок-участке контролируют исправность и свободность рельсового пути, формируют и передают в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, переданные сигналы принимают бортовым устройством рельсового транспортного средства, определяют текущее местонахождение головы рельсового транспортного средства, при приближении поезда на перегоне к занятому или неисправному блок-участку и/или рельсовой цепи осуществляют требуемое по условиям безопасности движения снижение скорости, согласно изобретению в передаваемые в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи вводят монотонно возрастающие в направлении против установленного направления движения при автоблокировки, начиная от границы станции приема с перегоном приближения рельсового транспортного средства со стороны станции его отправления, числовые значения, идентифицирующие кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, подсчитывают бортовым устройством рельсового транспортного средства число блок-участков до занятого или неисправного блок-участка, по которому определяют расстояние до занятого или неисправного блок-участка.
При движении по перегону с реверсивным направлением движения смену числовых значений идентифицирующих кодовых сигналов о свободности и исправности блок-участка и/или рельсовой цепи производят только при свободности перегона от подвижного состава, закрытом положении выходных светофоров на станции отправления и отсутствии в ее горловине поездов, двигающихся на перегон по поездным сигналам, а также выполняющих маневры с выходом на перегон по ключу-жезлу или по маневровому сигналу, установленному на входном светофоре.
В части устройства технический результат достигается тем, что в системе для управления рельсовым транспортным средством, содержащей бортовое устройство рельсового транспортного средства, в котором выход блока контроля безопасности соединен через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, путевые электрические рельсовые цепи, к каждой из которых подключен путевой передатчик кодового сигнала, сигнальный вход которого соединен с выходом блока контроля свободности и исправности рельсового пути, согласно изобретению введены блок задания направления и маршрута движения по соответствующему пути перегона и по числу путевых электрических рельсовых цепей, блоки формирования числовых значений идентификации, управляющие входы которых подключены к соответствующим входам блока задания направления движения по соответствующему пути перегона, а выходы - к входу задания значений идентифицирующих кодовых сигналов соответствующего путевого передатчика кодового сигнала.
На чертеже приведена схема системы для управления рельсовым транспортным средством, реализующей предлагаемый способ.
Система управления рельсовым транспортным средством содержит блок 1 контроля безопасности, соединенный через усилитель 2 с входом электропневматического клапана 3, входы блока 1 контроля безопасности соединены с выходами модулей 4 и 5 центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу 6, к которому подключены два модуля 7 и 8 измерения параметров движения и два модуля 9 и 10 непрерывных каналов внешних устройств, входы модулей 9 и 10 непрерывных каналов внешних устройств соединены с блоком 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей 7 и 8 измерения параметров движения соединены с модулем 12 датчиков пути и скорости; подключенные к межмодульному интерфейсу 6 модуль 13 маршрута и модуль 14 радиоканала своими портами соединены соответственно с портом приемника 15 спутниковой навигации, к входу которого подключена антенна 16 спутниковой навигации и с портом радиомодема 17, соединенного с радиоантенной 18; блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста подключен к межмодульному интерфейсу 6; вход блока 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации индуктивно связан с путевыми электрическими рельсовыми цепями 20i, каждая из которых содержит путевой передатчик 21 кодового сигнала, информационный вход которого соединен с выходом соответствующего блока 22 контроля свободности и исправности рельсового пути, входы задания значений идентифицирующих кодовых сигналов каждого путевого передатчика 21 кодового сигнала соединены с выходом соответствующего блока 23 формирования числовых значений идентификации, управляющие входы которых соединены с соответствующими выходами блока 24 задания направления и маршрута движения по соответствующему пути перегона.
Система для управления рельсовым транспортным средством работает следующим образом.
Перед каждой поездкой рельсового транспортного средства в память модуля 13 маршрута записывают электронную карту маршрута, которая позволяет совместно с данными о текущих координатах местонахождения рельсового транспортного средства, поступающими от приемника 15 спутниковой навигации, рассчитать параметры режимов ведения рельсового транспортного средства в каждой точке маршрута движения. Параллельно с расчетами скорости движения и местонахождения рельсового транспортного средства по данным от модуля 13 маршрута и приемника 15 спутниковой навигации для уменьшения влияния условий по приему сигналов от спутников, фактическая скорость рельсового транспортного средства и пройденный им путь рассчитываются с помощью модулей 7 и 8 измерения параметров движения на основе данных, поступающих от колесных датчиков модуля 12 датчиков пути и скорости. Модули центральной обработки информации 4 и 5 на основе данных от всех других модулей определяют оптимальный скоростной режим. При приближении рельсового транспортного средства на перегоне к занятому или неисправному блок-участку, или другому препятствию с известной координатой, модули центральной обработки информации 4 и 5 обеспечивают требуемое по условиям безопасности движения снижение скорости. Для этого они воздействуют через блок 1 контроля безопасности и усилитель 2 на электропневматический клапан 3.
Выделение первичной информации из сигналов автоматической локомотивной сигнализации, воспринимаемых из электрических рельсовых цепей 20i, осуществляют модули 9 и 10 непрерывных каналов внешних устройств. Они выделяют из принимаемых кодовых сигналов информацию о количестве свободных блок-участков и индивидуальный номер текущей электрической рельсовой цепи 20i участка рельсового пути, на котором в данный момент времени находится рельсовое транспортное средство. Эти данные поступают в модули 4 и 5 центральной обработки информации управления движением рельсового транспортного средства для выработки соответствующего режима движения.
Блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста осуществляет выбор оптимального технологического алгоритма управления торможением и проверки бдительности машиниста в зависимости от полноты и достоверности всей поступающей на рельсовое транспортное средство оперативной информации. Блок 19 позволяет повысить безопасность движения и предотвращает частые переходы устройства на работу по резервному алгоритму со ступенчатым контролем скорости, при котором снижается участковая скорость движения рельсового транспортного средства. Блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста параллельно с приемником 15 спутниковой навигации и модулем 13 маршрута с заданной периодичностью вырабатывает информацию о расчетной координате места нахождения рельсового транспортного средства. Для каждого отрезка впереди лежащего пути с расчетной длиной, равной длине пути торможения перед препятствием, в оперативную память модулей 4 и 5 центральной обработки информации поступает информация из модуля 13 маршрута, которая дополняется оперативной информацией, приходящей через модуль 14 радиоканала цифровой связи от стационарных устройств системы (на чертеже не показаны). Эта информация имеет приоритет перед аналогичной по смыслу информацией, считанной из модуля 13 маршрута.
Например, при передаче модулем 14 по радиоканалу цифровой связи координат зоны внезапно появившегося препятствия на пути следования рельсового транспортного средства (упавшее дерево, сход селевого потока, снежной лавины и т.д.), которые могут быть получены от различных подсистем внешнего наблюдения системы транспортной безопасности, блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста воздействием на модули 4 и 5 центральной обработки информации изменяет алгоритмы управления торможением и подтверждения бдительности машинистом. То же происходит при перерывах в нормальной работе радиоканала цифровой связи, в состав которого входят модуль 14 радиоканала, соединенный с портом радиомодема 17, соединенного с радиоантенной 18. В частности, в этих случаях управления торможением и проверки бдительности машиниста от машиниста требуется дополнительное подтверждение бдительности при проследовании каждого путевого светофора, и этот режим сохраняется до восстановления нормального приема информации модулем 14 по радиоканалу. Для повышения безопасности блок 19 переключения технологических алгоритмов управления торможением и проверки бдительности машиниста использует информацию, передаваемую по радиоканалу цифровой связи от путевых устройств интервального регулирования при каждом вступлении рельсового транспортного средства на очередную рельсовую цепь. Эта информация включает идентификационный номер очередной рельсовой цепи, координаты ее входного конца, длину и идентификационный номер следующей за ней рельсовой цепи. Это позволяет повысить достоверность контроля правильности функционирования аппаратуры посредством проверки совпадения прогнозируемых и фактических событий. Так, например, совпадение ожидаемого по электронной карте маршрута идентификационного номера рельсовой цепи с полученным от рельсовой цепи 20i текущим номером, является дополнительной проверкой правильности работы модуля 13 маршрута, а совпадение измеренной длины рельсовой цепи 20i с ее длиной, известной из электронной карты маршрута, гарантирует исправную работу модуля 13 маршрута, приемника 15 спутниковой навигации, модулей 7 и 8 измерения параметров движения и модуля 12 датчиков пути и скорости.
Для восстановления или коррекции привязки к электронной карте маршрута на границах электрических рельсовых цепей 20.1 - 20n, производится дополнительное уточнение координаты, путем фиксации координаты, при которой происходит изменение номера текущей рельсовой цепи в идентифицирующем кодовом сигнале. Фиксация координаты, при которой происходит изменение номера текущей рельсовой цепи, производится модулями 4 и 5 центральной обработки информации для дополнительной коррекции ошибки вычисления текущей координаты местонахождения рельсового транспортного средства. Особенно это полезно, при прохождении рельсовым транспортным средством мест с неуверенным радиоприемом, так как дублирует аналогичную информацию, передаваемую от путевых устройств интервального регулирования по радиоканалу цифровой связи и принимаемую модулем 14 через радиомодем 17, соединенный с радиоантенной 18.
Использование таких корректировок не имеет ограничений, связанных с условиями распространения, например, сигналов спутниковой навигации, и одинаково приемлемо, как для открытой местности, так и для горной местности, или тоннелей.
При сбое (например, из-за помех электропитания) в определении текущей координаты места нахождения транспортного средства теряется информация не только о его местонахождении в привязке к электронной карте маршрута, но и информация о постоянных ограничениях скорости, связанных с ограничениями путевой инфраструктуры.
Если система производит восстановление правильной позиции после сбоя с задержкой до момента смены идентификационного номера на границе со следующей электрической рельсовой цепью 20i+1, теряется часть информации, необходимая для движения с максимально разрешенной скоростью, что часто приводит к снижению разрешенной скорости движения. Если восстановление правильного позиционирования задержится вплоть до подхода транспортного средства к горловине принимающей станции, то подобный сбой может привести к существенному снижению пропускной способности в горловине станции приема, так как из-за сбоя появляется неопределенность в том, какой маршрут приема будет использован - по главным путям станции или по боковым путям станции, и модули 4 и 5 центральной обработки информации для безопасности выберут уменьшенную скорость, разрешенную для движения на боковые пути.
Блок 24 задания направления движения и маршрута по соответствующему пути перегона, воздействуя на блоки 23 задания числовых значений идентифицирующих кодовых сигналов, вводит в блоки 21 путевых передатчиков идентифицирующие кодовые сигналы, числовые значения которых устанавливает монотонно возрастающими в направлении против установленного направления движения при автоблокировке, начиная от границы станции приема с перегоном приближения рельсового транспортного средства со стороны станции его отправления.
Тогда, например, при нахождении рельсового транспортного средства на блок-участке и/или рельсовой цепи 20i перегона, имеющих числовое значение идентифицирующего номера, равное i, прием информации о трех свободных и исправных блок-участках перед рельсовым транспортным средством свидетельствует о маршруте приема на главный путь, а получение информации только о двух свободных и исправных блок-участках свидетельствует о маршруте приема на боковой путь и требует снижения скорости движения. Эта информация позволяет сохранить возможность движения с правильной максимально допустимой скоростью и избежать потери пропускной способности горловины станции приема при сбоях в работе подсистем определения точных координат местонахождения рельсового транспортного средства.
Блок 24 смены направления движения и маршрута управляется со станции приема (связи блока 24 с аппаратурой автоблокировки и электрической централизации на схеме для упрощения чертежа не показаны). При этом для обеспечения безопасности движения вначале переводится в положение «прием» станция отправления, а после получения контроля об этом, станция, бывшая на приеме, переводится в положение «отправление». Смену направления производит дежурный по станции приема только при перегоне, свободном от подвижного состава. При этом на станции приема обязательно имеется индикация о свободности перегона, свободности всех перегонных блок-участков, закрытом положении выходных светофоров на станции отправления и отсутствии в ее горловине поездов, двигающихся на перегон по поездным сигналам, а также выполняющих маневры с выходом на перегон по ключу-жезлу или по маневровому сигналу, установленному на входном светофоре.
Таким образом, предлагаемое изобретение позволяет уменьшить влияние сбоев в точном определении позиции рельсового транспортного средства на пропускную способность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
Изобретение относится к железнодорожной автоматике, телемеханике и связи. В способе управления рельсовым транспортным средством на каждом блок-участке контролируют свободность рельсового пути, передают в рельсовую цепь кодовые сигналы о свободности блок-участка. В передаваемые сигналы вводят монотонно возрастающие в направлении против установленного направления движения числовые значения, начиная от границы станции приема с перегоном приближения поезда. Подсчитывают число блок-участков до занятого блок-участка, по которому определяют расстояние до занятого блок участка. В систему для реализации способа введены блок задания направления и маршрута движения по соответствующему пути перегона и по числу путевых электрических рельсовых цепей и блоки формирования числовых значений идентификации. Достигается повышение надежности и точности определения позиции рельсового транспортного средства. 2 н. и 1 з.п. ф-лы, 1 ил.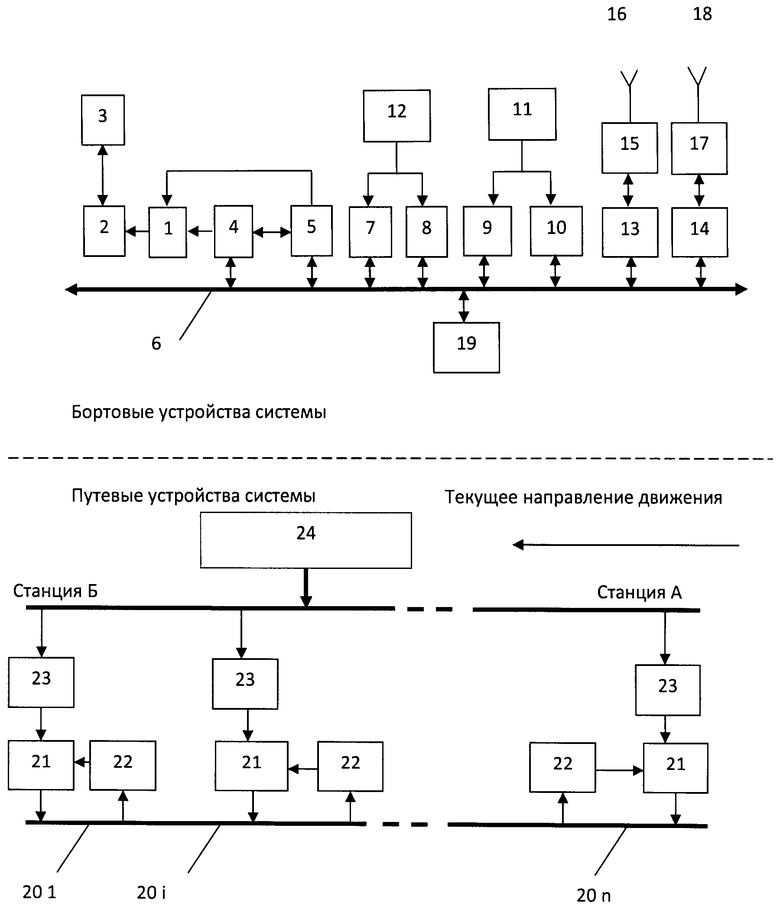
1. Способ управления рельсовым транспортным средством, по которому на каждом блок-участке контролируют исправность и свободность рельсового пути, формируют и передают в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, переданные сигналы принимают бортовым устройством рельсового транспортного средства, определяют текущее местонахождение головы рельсового транспортного средства, при приближении поезда на перегоне к занятому или неисправному блок-участку и/или рельсовой цепи осуществляют требуемое по условиям безопасности движения снижение скорости, отличающийся тем, что в передаваемые в рельсовую цепь кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи вводят монотонно возрастающие в направлении против установленного направления движения при автоблокировке, начиная от границы станции приема с перегоном приближения рельсового транспортного средства, числовые значения, идентифицирующие кодовые сигналы о свободности и исправности блок-участка и/или рельсовой цепи, подсчитывают бортовым устройством рельсового транспортного средства число блок-участков до занятого или неисправного блок-участка, по которому определяют расстояние до занятого или неисправного блок-участка.
2. Способ управления рельсовым транспортным средством по п.1, отличающийся тем, что при движении по перегону с реверсивным направлением движения смену числовых значений идентифицирующих кодовых сигналов о свободности и исправности блок-участка и/или рельсовой цепи производят только при свободности перегона от подвижного состава, закрытом положении выходных светофоров на станции отправления и отсутствии в ее горловине поездов, двигающихся на перегон по поездным сигналам, а также выполняющих маневры с выходом на перегон по ключу-жезлу или по маневровому сигналу, установленному на входном светофоре.
3. Система для управления рельсовым транспортным средством, содержащая бортовое устройство рельсового транспортного средства, в котором выход блока контроля безопасности соединен через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок переключения технологических алгоритмов управления торможением и проверки бдительности машиниста, подключенный к межмодульному интерфейсу, путевые электрические рельсовые цепи, к каждой из которых подключен путевой передатчик кодового сигнала, сигнальный вход которого соединен с выходом блока контроля свободности и исправности рельсового пути, отличающаяся тем, что в нее введены блок задания направления и маршрута движения по соответствующему пути перегона и по числу путевых электрических рельсовых цепей, блоки формирования числовых значений идентификации, управляющие входы которых подключены к соответствующим входам блока задания направления движения по соответствующему пути перегона, а выходы - к входу задания значений идентифицирующих кодовых сигналов соответствующего путевого передатчика кодового сигнала.
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |

