Изобретение относится к области железнодорожной автоматики телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов.
Известна система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, в которой сопоставление реальной координаты места нахождения поезда, полученной путем измерения пройденного пути и текущей координаты, полученной приемником спутниковой навигации, с координатой местоположения поезда на электронной карте маршрута производят по сигналам от радиомаяков (бализов), установленных на пути и передающих на проходящие локомотивы координаты своего местоположения (CA 2520605, B61L 25/02, 30.03.06).
Известная система имеет относительно сложные путевые устройства и недостаточную защищенность от повреждающих факторов внешней среды, а также от вандализма. Кроме того, известная система не может правильно функционировать в местах, где нет приема сигнала, например в тоннелях.
Путь определения позиции, не требующий внешних сгнальных устройств, заключается в измерении скорости и ее интегрировании. Скорость может быть измерена с помощью тахометров, связанными с колесами. Однако проскальзывание колес, например, во время торможения приводит к ошибкам в измерениях. Проблема интегрирования скоростей состоит в интегрировании систематических погрешностей, обусловленных нарушениями калибровки, что приводит к непрерывному возрастанию ошибки.
Наиболее близкой по технической сущности к заявляемому изобретению является принятая в качестве прототипа система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащая в бортовом устройстве рельсового транспортного средства идентичные первый и второй токовихревые датчики обнаружения неоднородностей рельсового пути, блок масштабирования сигналов, блок вычисления взаимной корреляции принимаемых сигналов с образцовыми сигналами, блок идентификации элементов рельсового пути, блок памяти образцовых сигналов и координат элементов рельсового пути и блок вычисления, причем выход первого из упомянутых датчиков соединен с первым входом блока вычисления взаимной корреляции принимаемых сигналов с образцовыми сигналами, второй вход которого соединен с выходом второго из упомянутых датчиков, а выход соединен с первым входом блока масштабирования сигналов, выход которого соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти образцовых сигналов и координат элементов рельсового пути, а выход соединен с первым входом блока вычислений, второй вход которого соединен со вторым выходом блока памяти образцовых сигналов и координат элементов рельсового пути (WO 0166401 A1, B61L 25/02, 13.09.01).
В известной системе посредством предварительного запоминания позиции и особенностей ряда топологических неоднородностей рельсового пути, образуемых такими его элементами, как стрелки, рельсовые крепления и направляющие рельсы вдоль возможных маршрутов следования, и идентификации этих элементов в процессе движения позиция определяется с высокой точностью и независимо от внешних сигнальных систем, что обеспечивает работоспособность даже при движении в тоннелях.
Высокая точность определения позиции достигается интерполяцией позиции между зафиксированными элементами пути посредством интегрирования скорости поезда. Поскольку дистанция между такими элементами, как крепления рельсов к шпалам, мала, ошибка интегрирования получается незначительной. Необходимо также обеспечивать точность подсчета количества креплений и интерполяции позиции поезда между ними. Недостатком известной системы является плохая устойчивость к сбоям и электромагнитным помехам. Например, при сбое из-за помех электропитания или грозовых разрядов может произойти сбой в подсчете количества элементов креплений. Поскольку эти элементы не различимы существенно друг от друга по сигналам, которые они вызывают в токовихревых датчиках, будет надолго потеряна привязка местоположения транспортного средства к правильной координате на электронной карте рельсовой сети. Восстановление правильного идентифицирования будет возможно только после прохождения транспортным средством над очередным элементом рельсового пути с выраженными индивидуальными характеристиками, таким как, например, стрелочный перевод. Эта ситуация требует немедленного снижения скорости до минимально разрешенной по всему участку и продолжения движения с малой скоростью до восстановления правильного позиционирования. Например, в случае движения поезда по перегону с бесстыковым путем очередная стрелка может встретиться только на следующей станции, и каждый подобный сбой будет приводить к существенному снижению пропускной способности.
Технический результат изобретения заключается в повышении пропускной способности при сбоях в точном определении позиции рельсового транспортного средства.
Технический результат достигается тем, что в систему для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащую два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути, согласно изобретению введены приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства, при этом вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути.
На чертеже приведена структурная схема предлагаемой системы для управления рельсовым транспортным средством и определения его позиции на рельсовом пути.
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути содержит два токовихревых датчика 1 и 2 обнаружения неоднородностей рельсового пути, подключенных к входам блока 3 вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок 4 масштабирования соединен с первым входом блока 5 идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока 6 памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока 7, первый вход которого подключен к выходу блока 5 идентификации элементов рельсового пути, приемник 8 идентифицирующих кодовых сигналов через дешифратор 9 соединен с третьим входом вычислительного блока 7, выход которого подключен к блоку 10 управления движением рельсового транспортного средства, вход приемника 8 идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями 11, каждая из которых включает в себя путевой передатчик 12 идентифицирующего кодового сигнала и блок 13 контроля свободности и исправности рельсового пути.
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути функционирует следующим образом.
Определение координаты местонахождения рельсового транспортного средства основано на сравнении характеристических особенностей для множества различных типов рельсовых элементов, записанных в блоке 6 памяти образцовых сигналов и координат элементов рельсового пути, с характеристическими особенностями сигналов от первого 1 и второго 2 токовихревых датчиков обнаружения неоднородностей рельсового пути. Сравнение позволяет идентифицировать тип элементов, над которыми последовательно во времени проходят датчики 1 и 2. Знание типа и порядкового номера элементов, встретившихся по пути следования рельсового транспортного средства, позволяет по карте, которая хранится в блоке 6 памяти образцовых сигналов и координат элементов рельсового пути, определить позицию очередного и следующего ожидаемого элемента рельсового пути.
Характеристические особенности индивидуальных рельсовых компонентов по маршруту, например, таких как стрелки, позволяют всегда их определить однозначно. Однако повторяющиеся типовые элементы (например, элементы креплений рельсов к шпалам) однозначно идентифицируются при условии отсутствия сбоев при подсчете их общего числа, определяющего порядковый номер очередного элемента.
Для устранения зависимости от скорости поезда сигналы от датчиков 1 и 2 перед сравнением масштабируются в блоке 4 масштабирования. Расстояние между поездом и последним определенным элементом рельсового пути вычисляется посредством интегрирования скорости поезда, а скорость поезда вычисляется на основе временного сдвига между сигналами датчиков 1 и 2, которые на рельсовом транспортном средстве размещены на определенном расстоянии по направлению движения. Это позволяет по сравнению с широко распространенным способом измерения скорости и пройденного пути по числу импульсов от колесного датчика исключить ошибки из-за юза и буксования и неточной калибровки диаметра бандажа. Сравнение между полученными от датчиков 1 и 2 сигналами и образцами, хранящимися в памяти, производится в блоке 3 вычисления взаимной корреляции сигналов, принимаемых от датчиков, с образцовыми сигналами.
Высокая точность определения позиции достигается интерполяцией позиции между зафиксированными элементами пути посредством интегрирования скорости поезда. Поскольку дистанция между такими элементами, как крепления рельсов к шпалам, мала, ошибка интегрирования получается незначительной. Совпадение идентификаторов прогнозируемого конструктивного элемента с реально обнаруженным подтверждает с высокой достоверностью соответствие расчетной по карте в электронной памяти и фактической позиции рельсового транспортного средства. Для исключения снижения пропускной способности при сбоях рассмотренного выше точного метода определения координаты рельсового транспортного средства параллельно производится определение координаты с помощью декодирования принятых приемником 8 идентифицирующих кодовых сигналов, поступающих из электрических рельсовых цепей 111-11n. Использование электрических рельсовых цепей приемлемо как для открытой местности, так и для горной местности или тоннелей, поскольку отсутствуют ограничения, например, связанные с условиями распространения, которые имеют место при использовании радиосигналов.
Декодирование сигналов, поступивших из электрических рельсовых цепей 111-11n, осуществляет дешифратор 9, который выделяет из принимаемого кодового сигнала наряду с информацией о расстоянии до места ограничения скорости индивидуальный номер электрической рельсовой цепи 11i участка рельсового пути, на котором в данный момент времени находится рельсовое транспортное средство. Пройденный путь от начала участка с данной рельсовой цепью с момента возникновения и на все время сбоя измеряется от колесного датчика импульсов с присущей этому методу меньшей точностью. Вычислительный блок 7 учитывает эту неточность при расчете тормозной кривой, параметры которой передаются в блок 10 управления движением рельсового транспортного средства для выработки соответствующего режима движения. Если при сбое из-за помех электропитания произойдет сбой в подсчете количества, например, элементов креплений и будет потеряна привязка местоположения транспортного средства к правильной координате на электронной карте рельсовой сети, система немедленно производит восстановление правильного идентифицирования на основе знания идентификационного номера электрической рельсовой цепи и пути, пройденного рельсовым транспортным средством с момента вступления на эту рельсовую цепь.
При этом необходимое снижение скорости для обеспечения безопасного ведения рельсового транспортного средства при меньшей точности измерения пройденного пути незначительно в сравнении с рассмотренным для прототипа случаем временной полной потери информации о местонахождении. Определение точной позиции рельсового транспортного средства осуществляется при каждом вступлении на участок с электрической рельсовой цепью, имеющей другой индивидуальный номер.
Таким образом, предлагаемая система обеспечивает повышение пропускной способности при сбоях в точном определении позиции рельсового транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ДЛЯ ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2013 |
|
RU2538498C1 |
| Система для определения оптимального места остановки головного вагона электропоезда в зависимости от количества вагонов в его составе и специфики остановочного пункта | 2017 |
|
RU2653901C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| Бортовое устройство для диагностики состояния рельсового пути | 2019 |
|
RU2704692C1 |
| Адаптивный приемник сигналов автоматической локомотивной сигнализации | 2023 |
|
RU2796436C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2429153C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СЛЕДУЮЩИМИ ДРУГ ЗА ДРУГОМ ПОЕЗДАМИ НА ОСНОВЕ ЦИФРОВОЙ РАДИОСВЯЗИ | 2015 |
|
RU2578646C1 |
Изобретение относится к области железнодорожной автоматики телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов. Система содержит два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти. Второй выход блока памяти соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути. В систему введен приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства. Вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути. Достигается повышение пропускной способности при сбоях в точном определении позиции рельсового транспортного средства. 1 ил.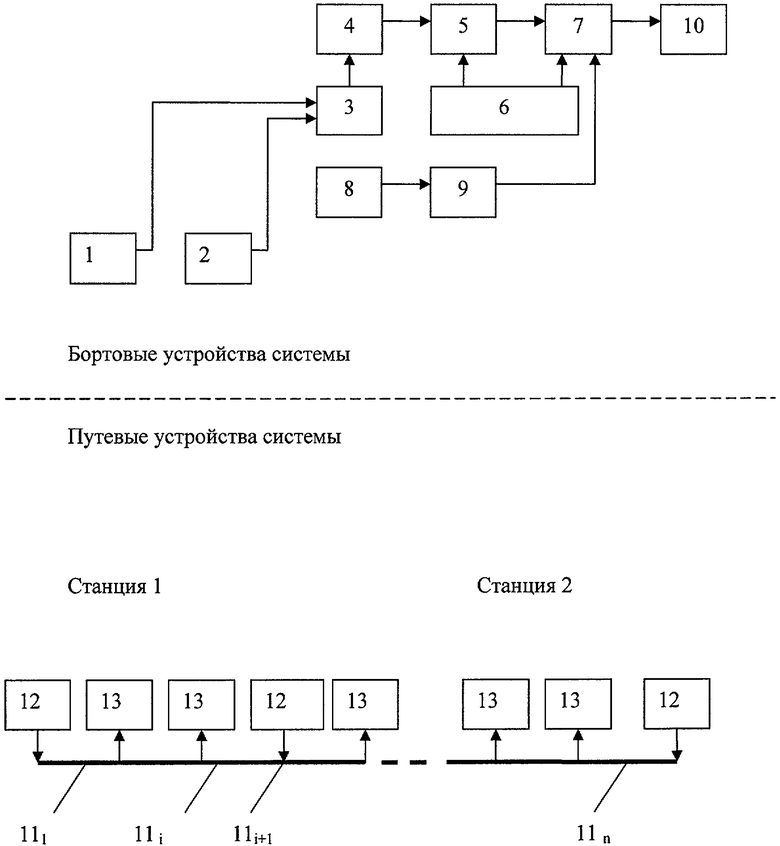
Система для управления рельсовым транспортным средством и определения его позиции на рельсовом пути, содержащая два токовихревых датчика обнаружения неоднородностей рельсового пути, подключенных к входам блока вычисления взаимной корреляции сигналов от датчиков с образцовыми сигналами, выход которого через блок масштабирования соединен с первым входом блока идентификации элементов рельсового пути, второй вход которого соединен с первым выходом блока памяти, предназначенного для хранения образцовых сигналов и координат элементов рельсового пути, второй выход которого соединен со вторым входом вычислительного блока, первый вход которого подключен к выходу блока идентификации элементов рельсового пути, отличающаяся тем, что в нее введен приемник идентифицирующих кодовых сигналов, соединенный через дешифратор с третьим входом вычислительного блока, выход которого соединен с блоком управления движением рельсового транспортного средства, при этом вход приемника идентифицирующих кодовых сигналов индуктивно связан с электрическими рельсовыми цепями, каждая из которых включает в себя путевой передатчик идентифицирующего кодового сигнала и блок контроля свободности и исправности рельсового пути.
| ЯКОРЬ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА | 0 |
|
SU166401A1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ЛОКОМОТИВОМ И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2003 |
|
RU2262459C2 |
| US 4728063 A, 01.03.1988 | |||
| EP 0736441 A1, 09.10.1996. | |||

