Изобретение относится к области адаптивной фильтрации, в частности к системам приема радиосигналов, в которых применяются методы борьбы с импульсными помехами (ИП). Оно может применяться для повышения качества приема радиосигналов путем устранения негативного влияния ИП на работу адаптивных корректоров канальных искажений (АК) и адаптивных антенных систем (ААС).
Одним из факторов, негативно влияющих на качество приема радиосигналов, является наличие внешних ИП в полосе приема [3]. Они обладают случайной длительностью, шириной спектра и энергией, что существенно затрудняет борьбу с ними [1, 2, 4-6, 8, 9, 12-14].
Известен способ борьбы с ИП, основанный на применении компенсационного тракта, расстроенного относительно частоты принимаемого сигнала. Недостатками способа является сложность формирования копии ИП в компенсационном тракте и оценки ее параметров, что существенно снижает эффективность компенсации.
Также известны способы борьбы с ИП, в основе которых лежит защита входа демодулятора от их воздействия путем ограничения амплитуды сигнала наблюдения, запирания входа схемы принятия решений на интервале действия ИП или замены сигнала наблюдения на интервале действия ИП шумовой реализацией (или другими вспомогательными сигналами). Недостатком первого способа являются нелинейные искажения принимаемого сигнала, недостатком второго - потеря информации, передаваемой на интервале действия ИП.
Известны способы линейной фильтрации ИП. Недостатком является сглаживание фронтов сигналов и, как следствие, снижение качества приема. Применяются способы медианной фильтрации для подавления ИП. Им свойственны два основных достоинства - хорошее подавление ИП длительностью менее половины размера окна медианного фильтра. К недостаткам можно отнести нелинейные преобразования принимаемого сигнала, приводящие к искажениям информации [11].
Целью предлагаемого изобретения является снижение влияния ИП на работу АК или ААС и повышение качества приема радиосигналов в условиях воздействия ИП.
В основе предлагаемого изобретения лежит идея снижения влияния ИП на работу АК или ААС. Снижение влияния достигается путем остановки алгоритма адаптации и фиксации его состояния на период действия ИП. В этом случае ИП может приводить к ошибочным решениям, но не нарушает работу адаптивного алгоритма расчета весовых коэффициентов АК или ААС. Для оценивания временных интервалов действия ИП предлагается процедура их локализации с применением min-max порога. Процедура позволяет определять интервалы действия ИП и оценивать огибающую полезного сигнала и шума на фоне ИП.
Для достижения цели изобретения предложен способ борьбы с импульсными помехами на основе их локализации с применением min-max порога в адаптивных системах приема радиосигналов, в котором для локализации ИП формируют огибающую сигнала наблюдения, разбивают ее на L/N блоков (L - длина исходного сигнала наблюдения, N- размер блока, при L, кратном N), выбирают максимальное значение огибающей на каждом блоке и формируют из них первую последовательность; затем из полученной первой последовательности формируют блоки длиной М (при L/N, кратном М), в каждом блоке выбирают минимальное значение и формируют из них вторую последовательность; далее методом кубической интерполяции строят кривую, где в качестве L/N·M узловых точек интерполяции, расположенных с шагом М·N, используют значения второй последовательности, а в качестве граничных узловых точек выбирают первое и последнее значения второй последовательности; полученную кривую используют в качестве оценки огибающей полезного сигнала и шума для расчета min-max порога, учитывающего вероятность ошибки обнаружения ИП; рассчитанный min-max порог используют для определения интервалов действия (индексов начальных позиций, длительностей) ИП в исходном сигнале наблюдения; при обработке сигнала наблюдения на интервале действия каждой из ИП осуществляют остановку и фиксируют состояние алгоритма расчета весовых коэффициентов адаптивных корректоров канальных искажений или адаптивных антенных систем; по завершении интервала действия ИП запускают алгоритм расчета весовых коэффициентов АК или ААС.
Предлагаемые технические решения позволяют снизить влияние ИП на работу алгоритмов расчета весовых коэффициентов АК и ААС, повысить качество принимаемых сигналов по сравнению с известными способами борьбы с ИП [1, 2, 4-6, 8, 9, 12-14].
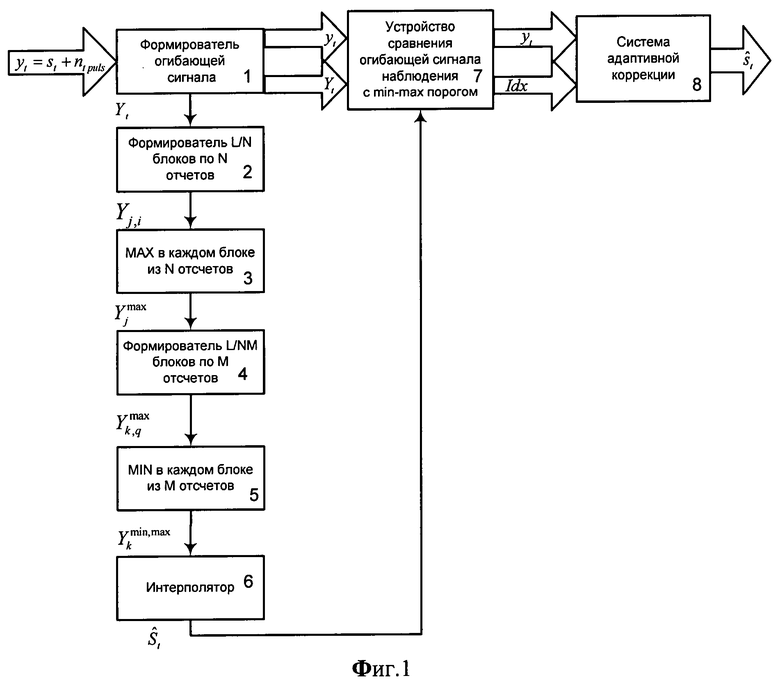
Изобретение поясняется чертежом (фиг.1). На чертеже (фиг.1) изображено устройство борьбы с ИП на основе их локализации с применением min-max порога в адаптивных системах приема радиосигналов.
Устройство борьбы с ИП на основе их локализации (фиг.1), содержит: узел 1 - узел формирования огибающей сигнала наблюдения; узел 2 - узел разбиения огибающей сигнала наблюдения на L/N блоков длиной N отсчетов; узел 3 - узел выбора максимальных значений на каждом из L/N блоков и формирования первой последовательности; узел 4 - узел разбиения первой последовательности на L/(N·M) блоков длительностью М отсчетов; узел 5 - узел выбора минимальных значений на каждом из L/(N·M) блоков и формирования из них второй последовательности; узел 6 - узел кубической сплайн интерполяции на основе второй последовательности и расчета min-max порога; узел 7 - узел сравнения огибающей принятого сигнала наблюдения с min-max порогом; узел 8 - АК или ААС.
Пусть  t=0,1…L-1 исходный сигнал наблюдения длительностью L отсчетов, представляющий собой аддитивную смесь полезного сигнала st, шумов и импульсных помех,
t=0,1…L-1 исходный сигнал наблюдения длительностью L отсчетов, представляющий собой аддитивную смесь полезного сигнала st, шумов и импульсных помех,  t=0,1…L-1.
t=0,1…L-1.
Узел 1 предназначен для получения отсчетов Yt огибающей сигнала наблюдения 
где
t=0,1…L-1,
re(yt), im(yt) - операции извлечения действительной и мнимой части исходного сигнала наблюдения.
В узле 2 происходит разбиение огибающей сигнала наблюдения Yt,
t=0,1…L-1 на L/N блоков длиной N отсчетов каждый:
Yj,i, j=0,1…L/N-1, i=0,1…N-1, где j - номер блока, i - номер отсчета огибающей сигнала наблюдения в блоке.
В узле 3 осуществляется выбор максимального значения огибающей сигнала наблюдения  в каждом из L/N блоков и формирование из этих значений первой последовательности Ymax:
в каждом из L/N блоков и формирование из этих значений первой последовательности Ymax:
 , j=0,1…L/N-1, i=0,1…N-1.
, j=0,1…L/N-1, i=0,1…N-1.
В узле 4 происходит разбиение первой последовательности Ymax на L/(N·М) блоков длиной М отсчетов каждый:

где k - номер блока, q - номер отсчета последовательности Ymax в блоке.
В узле 5 осуществляется выбор минимального значения  в каждом из
в каждом из
L/(N·M) блоков первой последовательности  и формирование из этих значений второй последовательности Ymin,max.
и формирование из этих значений второй последовательности Ymin,max.

В узле 6 посредством кубической сплайн интерполяции осуществляется формирование оценки огибающей полезного сигнала и шума St в каждом k блоке. В качестве узловых точек интерполяции, расположенных через M·N отсчетов, используют значения , k=0,1…L/(N·M)-1 второй последовательности Ymin,max, а в качестве граничных узловых точек выбирают первое
, k=0,1…L/(N·M)-1 второй последовательности Ymin,max, а в качестве граничных узловых точек выбирают первое  и последнее
и последнее
 значения второй последовательности; полученную кривую используют в качестве порога.
значения второй последовательности; полученную кривую используют в качестве порога.

 - оценка огибающей полезного сигнала и шума на k блоке, где
- оценка огибающей полезного сигнала и шума на k блоке, где
t∈[k·N·M, (k+1)·N·M], k=0,1…L/(N·M)-1;
ak, bk, ck - коэффициенты сплайна для k-блока, Sk,t=ak,  ,
,  - значение функции и производные в узловых точках [7, 10].
- значение функции и производные в узловых точках [7, 10].
Объединение оценок Sk,t, t∈[k·N·M, (k+1)·N·M],  на всем интервале наблюдения обозначим St, t=0,1…L-1.
на всем интервале наблюдения обозначим St, t=0,1…L-1.
Узел 7 выполняет сравнение оценки огибающей сигнала наблюдения Yt с рассчитанным min-max порогом Рt=St+Δ(Рош), где
t=0,1…L-1,
Δ(Рош) - смещение оценки St, для заданной вероятности ошибки обнаружения ИП.
При превышении min-max порога принимается решение об обнаружении ИП и определяется интервал ее действия (индекс начальной позиции Idx, длительность Δt).
 , где
, где
t=0,1…L-1,
k∈[0,L-1],
Δt=Idxm-Idx0, длительность Δt - это разница между индексами m - последнего и 0 - первого отсчета ИП, при превышении min-max порога.
Узел 8 обрабатывает сигнал наблюдения yt, на интервале действия каждой из ИП (Idx, Δt) осуществляет остановку и фиксирует состояние алгоритма расчета весовых коэффициентов АК или ААС; по завершении интервала действия ИП запускает алгоритм расчета весовых коэффициентов АК или ААС. На выходе узла формируется оценка полезного сигнала St.
Реализация описанного способа может быть аппаратной, программной или аппаратно-программной.
Достигаемым техническим результатом предлагаемого способа является описанная выше процедура борьбы с ИП, на основе их локализации с применением min-max порога, снижение негативного влияния ИП на работу адаптивных систем приема радиосигналов и, как следствие, повышение качества приема.
Источники информации
1. Венскаускас К.К., Малахов Л.М. Импульсные помехи и их воздействие на систему связи. - Зарубежная радиоэлектроника, 1977, №5, с.3.
2. Васильев К.К., Глушков В.А., Дормидонтов А.В., Нестеренко А.Г. Теория электрической связи: учебное пособие / под общ. ред. К.К.Васильева. - Ульяновск: УлГТУ, 2008. - 452 с.
3. Венскаускас К.К., Малахов Л.М. Импульсные помехи и их воздействие на системы радиосвязи (обзор). - Зарубежная радиоэлектроника, 1978, №1, с.95-125.
4. Коржик В.И., Финк Л.М., Щелкунов Н.Н. Расчет помехоустойчивости систем передачи дискретных сообщений: Справочник / Коржик В.И., Финк Л.М., Щелкунов К.Н.: Под ред. Л.М.Финка. - Радио и Связь, 1981. - 232 с.
5. Кузьмин Б.И. Импульсные помехи и анализ помехоустойчивости (обзор). - Изв. вузов. Радиоэлектроника, 1981, т.24, №4, с.4-16. Иванкин П.А., Лебединский Е.В. О математической модели случайных станционных помех в системах радиосвязи. - Радиотехника, 1983, т.38, №6, с.47-50.
6. Комарович А.Ф., Сосунов В.Н. Случайные помехи и надежность KB связи. - М.: Связь, 1977. - 136 с.
7. Костомаров Д.П., Фаворский А.П. Вводные лекции по численным методам.
8. Проценко Л.Д. Математические модели импульсных помех. - Изв. вузов. Радиоэлектроника, 1983, т.26, №4, с.68-73.
9. Ремизов Л.Т. Модели радиопомех естественного происхождения (обзор). - Радиотехника и электроника, 1981, т.26, №2, с.211-237.
10. Роджерс Д., Адамс Дж. Математические основы машинной графики. - М.: Мир, 2001. - ISBN 5-03-002143-4.
11. Сафронов С.В. Адаптивный анализ шума в измерительных каналах с пороговым отбором: Диссертация на соискание ученой степени к.т.н. СП. - ЛЭТИ, 2008, - 173 с.
12. Boner F. Vehicular Radio Frequency Interference - Accomplishment and challenge. - "IEEE Transactions on vehicular Technology" v. VT-16, 1967, p.58-68.
13. Hall H.M. A new model for "impulsive" phenomena: application to atmospheric noise communication channels. Techn. Report N 3412-8 and 7050-7, August, 1966, Radioscience Lab. Stanford Electronics Labs.
14. Southwick R.A., Schulz R.B. A Method to evaluate the degradation effects of Impulsive Interference. - IEEE International Conference on Communications, Mineapolis, 1974, p.26C-1-26C-5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ устранения влияния узкополосной и импульсной помех на результаты измерений энергетических характеристик радионавигационных сигналов | 2017 |
|
RU2724620C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ВЧ ДИАПАЗОНА КАСКАДОМ АДАПТИВНЫХ ФИЛЬТРОВ РАЗЛИЧНОЙ ИНЕРЦИОННОСТИ С ОБЩЕЙ ОБРАТНОЙ СВЯЗЬЮ ПО РЕШЕНИЮ | 2014 |
|
RU2599928C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СЛУЧАЙНЫХ НИЗКОЭНЕРГЕТИЧЕСКИХ СИГНАЛОВ | 2012 |
|
RU2511598C2 |
| Устройство для измерения пространственно-поляризационных параметров радиосигналов | 1987 |
|
SU1520670A1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| Способ пространственной локализации радиомолчащих объектов в полуактивной радиолокационной системе | 2023 |
|
RU2820521C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗБОРЧИВОСТИ И ИНФОРМАТИВНОСТИ ЗВУКОВЫХ СИГНАЛОВ В ШУМОВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2589298C1 |
Изобретение относится к области адаптивной фильтрации. Техническим результатом является процедура борьбы с импульсными помехами (ИП), на основе их локализации с применением min-max порога, снижение негативного влияния ИП на работу адаптивных систем приема радиосигналов и, как следствие, повышение качества приема. Для этого, для принятого сигнала наблюдения, представляющего собой аддитивную смесь полезного сигнала, шумов и ИП, с целью локализации и снижения влияния ИП формируют огибающую сигнала наблюдения, разбивают ее на L/N блоков (L - длина исходного сигнала наблюдения, N - размер блока, при L, кратном N), выбирают максимальное значение огибающей на каждом блоке и формируют из них первую последовательность; затем из полученной первой последовательности формируют блоки длиной М (при L/N, кратном М), в каждом блоке выбирают минимальное значение и формируют из них вторую последовательность; далее методом кубической интерполяции строят кривую, где в качестве L/N·M узловых точек интерполяции, расположенных с шагом M·N , используют значения второй последовательности, а в качестве граничных узловых точек выбирают первое и последнее значения второй последовательности; полученную кривую используют в качестве оценки огибающей полезного сигнала и шума для расчета min-max порога, учитывающего вероятность ошибки обнаружения ИП; рассчитанный min-max порог используют для определения интервалов действия (индексов начальных позиций, длительностей) ИП в исходном сигнале наблюдения; при обработке сигнала наблюдения на интервале действия каждой из ИП осуществляют остановку и фиксируют состояние алгоритма расчета весовых коэффициентов адаптивных корректоров канальных искажений или адаптивных антенных систем; по завершении интервала действия ИП запускают алгоритм расчета весовых коэффициентов адаптивных корректоров канальных искажений или адаптивных антенных систем. 1 ил.
Способ борьбы с импульсными помехами (ИП) на основе их локализации с применением min-max порога в адаптивных системах приема радиосигналов, отличающийся тем, что для локализации ИП формируют огибающую сигнала наблюдения, разбивают ее на L/N блоков (L - длина исходного сигнала наблюдения, N - размер блока, при L кратном N), выбирают максимальное значение огибающей на каждом блоке и формируют из них первую последовательность; затем из полученной первой последовательности формируют блоки длиной М (при L/N кратном М), в каждом блоке выбирают минимальное значение и формируют из них вторую последовательность; далее методом кубической интерполяции строят кривую, где в L/N·M узловых точек интерполяции, расположенных с шагом М·N, используют значения второй последовательности, а в качестве граничных узловых точек выбирают первое и последнее значения второй последовательности; полученную кривую используют в качестве оценки огибающей полезного сигнала и шума для расчета min-max порога, учитывающего вероятность ошибки обнаружения ИП; рассчитанный min-max порог используют для определения интервалов действия ИП из их индексов начальных позиций и длительностей в исходном сигнале наблюдения; при обработке сигнала наблюдения на интервале действия каждой из ИП осуществляют остановку и фиксируют состояние алгоритма расчета весовых коэффициентов адаптивных корректоров канальных искажений или адаптивных антенных систем; по завершении интервала действия ИП запускают алгоритм расчета весовых коэффициентов адаптивных корректоров канальных искажений или адаптивных антенных систем.
| СПОСОБ И УСТРОЙСТВО БОРЬБЫ С ПОМЕХАМИ В СИСТЕМЕ СВЯЗИ | 2007 |
|
RU2446562C2 |
| СПОСОБ ОЦЕНКИ КАНАЛА В МНОГОЧАСТОТНЫХ СИСТЕМАХ РАДИОСВЯЗИ С НЕСКОЛЬКИМИ ПЕРЕДАЮЩИМИ И ПРИЕМНЫМИ АНТЕННАМИ | 2005 |
|
RU2298286C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2449472C1 |
| US 6381260 B1, 30.04.2002 | |||
| US 7457350 B2, 25.11.2008 | |||

